
Порой нас просят что-то сделать, когда мы уже чем-то заняты. На это просящий может получить вполне обоснованный ответ, — «подожди, у меня всего две руки». Тем не менее интерес к аугментациям, в том числе и дополнительным конечностям, присутствует в наших умах уже довольно давно. Это подтверждается произведениями литературы, видеоиграми, кино, и даже древними мифами и легендами. Но, если кому-то третья рука нужна в качестве дополнительного инструмента, то другим она необходима, чтобы перекрыть двигательную дисфункцию собственных конечностей. И вот ученые из университета Райса (Хьюстон, США) разработали необычную систему, которая собирает энергию от шагов человека и передает ее на устройство, выполняющее роль дополнительной руки. Из чего состоит система, за счет чего она работает, и насколько полезна такая аугментация? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
Вопрос аугментаций тела человека постепенно обрастает спорами из разряда этики. Что делать, если здоровый человек хочет заменить свою, скажем, левую руку на роботизированную? Будет ли проведение такой операции этично правильным? Может ли вообще пациент о таком просить? И стоит ли вообще проводить четкую грань между необходимостью и желанием? Это довольно щепетильные вопросы, на которые пока никто не может дать однозначных ответов.
Но если речь идет именно о пациентах, которые страдают от моторной дисфункции верхних, то тут аугментации явно переходят из категории футуристических игрушек в крайне необходимые инструменты. С мыслями именно о таких людях и проводилось данное исследование.
По данным неумолимой статистики на территории США проживает порядка 25-30 миллионов человек с функциональными ограничениями верхней части тела. Самой распространенной проблемой является сложность поднятия предметов весом 4.5 кг и более. Некоторые люди вообще не способны этого сделать. У других же пациентов могут наблюдаться сложности во время выполнения других действий: хватание, вытягивание, толкание, дотягивание и т. д.
Подобные нарушения сильно влияют на жизнь человека, ограничивая диапазон повседневных действий, которые здоровые люди совершают часто даже не задумываясь о них. Это также влияет и на трудоустройство и, как следствие, благосостояние человека.
Поиски решения этой проблемы проходят в разных сферах, от медицины и фармакологии до инженерии и робототехники. За последние годы было разработано немало вариаций экзоскелетов для поддержания спины, экзорукавов для плеч, локтей, предплечий и даже запястий.
Конечно, подобные устройства могут применяться и людьми без проблем с опорно-двигательными функциями. В таком случае человек получает расширение двигательных возможностей, что может быть полезно в разного рода деятельности.
Независимо от направления применения таких разработок, у них имеется общая проблема — питание. Использование батарей, компрессоров, насосов, а также других сопутствующих устройств сильно утяжеляют устройство, полностью нивелируя его полезность.
Следовательно, разработка легких, портативных и малогабаритных источников питания является необходимым условием для появления практичных носимых устройств, которые в полной мере используют возможности мягких роботизированных приводов.
И тут на помощь может прийти сам пользователь. Движения человека, тепло его тела, биохимический потенциал — все это легкодоступные и возобновляемые источники энергии для носимых устройств. Самым популярным источником энергии в рамках тела человека и носимых устройств является шаг. Еще в 1948 году были разработаны первые системы сбора энергии, интегрированные в обувь.
Для сбора энергии во время ходьбы использовалось несколько физических механизмов: пневматический, электромагнитный, трибоэлектрический, пьезоэлектрический, гидроэлектрический, термоэлектрический и пироэлектрический подходы. Недавние достижения в области тонкопленочных и волоконных трибоэлектрических наногенераторов и волоконных литий-ионных аккумуляторов позволили напрямую интегрировать их в стельки и ткань обуви.
Несмотря на такой прогресс, выходная мощность подобных систем находится в пределах милливатт. Этого, конечно, вполне достаточно для носимых датчиков, но недостаточно для питания практических вспомогательных приводов при повседневном использовании.
Кроме того, многие мягкие приводы, используемые в аугментациях, основаны на пневматике. А потому требуют дополнительного шага преобразования электрической энергии в пневматическую для использования, что еще больше снижает эффективность и увеличивает число необходимых компонентов системы.
Авторы рассматриваемого нами сегодня труда, как они сами утверждают, нашли решение всех вышеперечисленных проблем. Они создали систему сбора энергии на основе текстиля, которая извлекает пневматическую энергию с помощью насоса из мягкого текстиля, встроенного непосредственно в стельку обуви пользователя. Энергия, собранная во время ходьбы, сохраняется внутри мягкого, пригодного для носки текстильного баллона до тех пор, пока пользователь не направит ее на силовые приводы по мере необходимости.
Результаты исследования
Пневматика устройства
Изображение №1
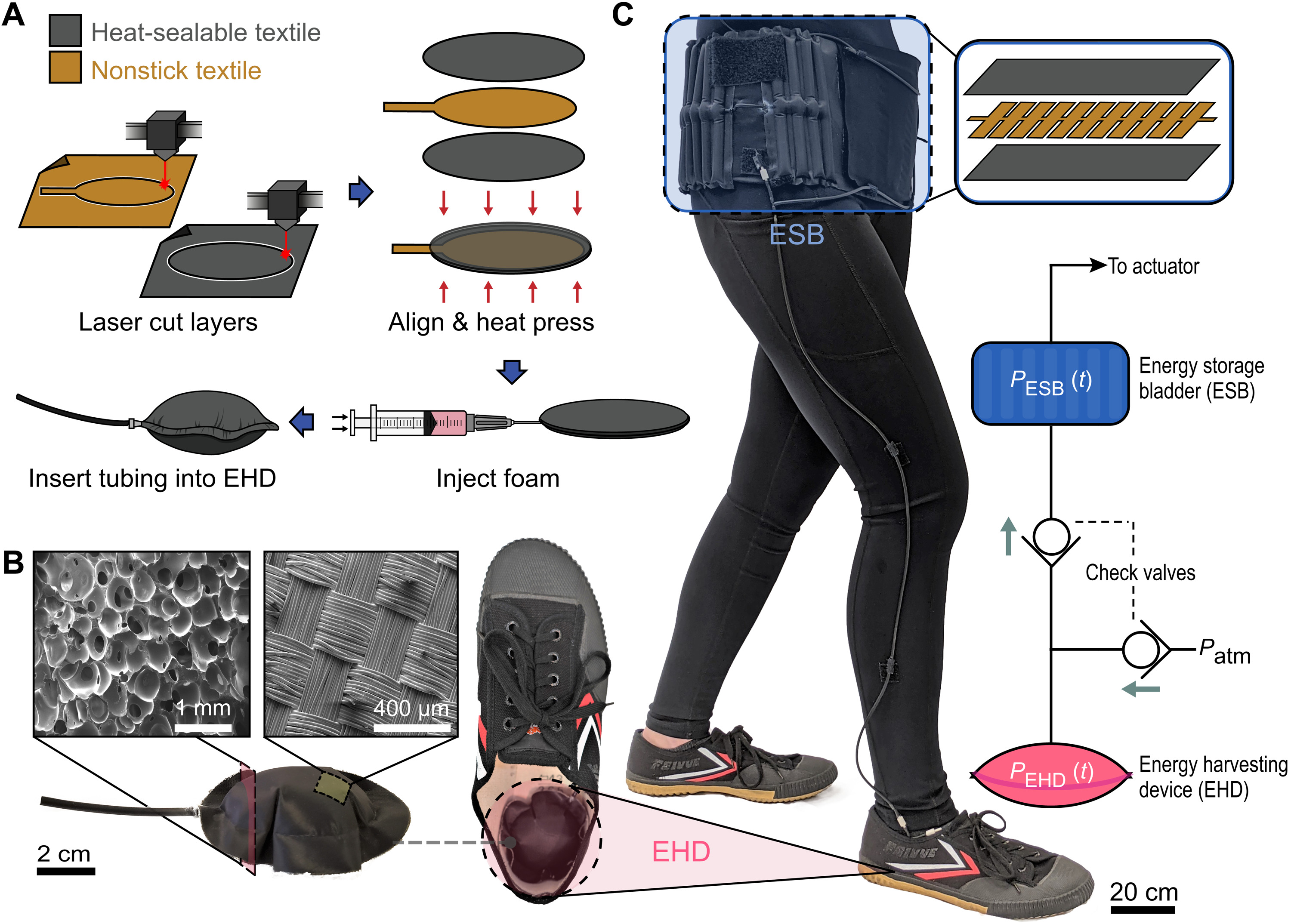
Мягкая система сбора энергии состоит из двух ключевых компонентов, каждый из которых изготовлен из текстиля (изображение №1): пневматический насос для стельки, который был назван «устройством сбора энергии» или EHD (energy harvesting device), и носимый пневматический аккумулятор, который был назван «мешочком для хранения энергии» или ESB (energy storage bladder).
Как EHD, так и ESB были изготовлены путем лазерного моделирования с последующим термическим соединением слоев текстиля, а именно ткани из нейлоновой тафты, покрытой с одной стороны термопластичным полиуретаном (TPU от thermoplastic polyurethane).
EHD-стельки способны выдерживать большие прилагаемые нагрузки (~ 300 Н) и циклическую деформацию. А ESB способен хранить воздух при высоком давлении (~ 1 бар) без утечки.
При ходьбе сжимающая сила стопы человека оказывает механическую силу на EHD, который преобразует ее в свободную энергию сжатого газа, которая затем передается и сохраняется в ESB для последующего использования. Чтобы обеспечить его работу в качестве воздушного насоса, EHD был наполнен полиуретановой пеной (1A). Также были добавлены пара обратных клапанов для обеспечения однонаправленного потока воздуха от входа к выходу (1C).
Когда усилие, приложенное ногой, давит на EHD («наступание» или фаза сжатия в цикле насоса), воздух внутри мешка сжимается и нагнетается через выпускной клапан в ESB. Когда стопа поднимается, сбрасывая давление на EHD («отрыв» или фаза всасывания в насосном цикле), мешок надувается под действием восстанавливающей силы пены и снова наполняется окружающим воздухом, всасываемым через впускной клапан.
Всего было создано три варианта EHD с разным объемом — 6, 35 и 72 мл. На 1C показана одна из возможных конфигураций системы сбора энергии и соответствующее размещение EHD и ESB на пользователе: гибкий ESB можно удобно носить на талии пользователя, а мягкий EHD незаметно помещается в обуви. ESB служит переносным источником сжатого воздуха для питания пневматических приводов, помогающих пользователю выполнять различные функции.

Изображение №2
Чтобы оценить производительность системы сбора энергии, ученые измерили силу давления ноги на EHD и давление внутри ESB в зависимости от времени для пользователя весом 55 кг, идущего по беговой дорожке со скоростью 3 мили в час (4.8 км/ч; 2A).
Тестирование системы с EHD объемом 35 мл.
В ходе тестов система успешно извлекала и сохраняла пневматическую энергию во время ходьбы, которая впоследствии использовалась для питания двух приводов, а именно дополнительной руки и устройства для подъема собственной руки.
Механо-жидкостное моделирование системы
Ученые использовали баланс квазистатической силы на мешочке для моделирования потока жидкости через EHD и, таким образом, охарактеризовали его насосную производительность (2B).
Для упрощения анализа воздух внутри мешочка моделировался с помощью уравнения состояния идеального газа, а температура газа принималась постоянной и равной стационарной температуре, измеренной внутри обуви.
Цикл накачки EHD происходит в четыре последовательных этапа, поскольку он подвергается многократной загрузке и разгрузке внутри обуви.
На этапе 1 сила, приложенная во время наступания ногой, сжимает EHD и увеличивает давление газа внутри пористой пены. Когда давление внутри EHD превышает давление в ESB, выпускной клапан открывается, выпуская сжатый воздух в ESB для хранения (этап 2). Этап 3 начинается с отрыва стопы; по мере уменьшения приложенной силы EHD расширяется под действием восстанавливающей силы пены, и давление газа внутри мешочка падает. Наконец, на этапе 4 новый воздух всасывается через впускной клапан, когда внутреннее давление падает ниже давления окружающей среды.
На 2B показаны силы, действующие на верхнюю стенку мешочка в произвольной точке в течение этого цикла. К ним относятся:
- шаговая сила Fstep, действующая на стопу;
- восстанавливающая сила Fspring от пены;
- силы давления Fatm и Fgas, возникающие в результате внутреннего и внешнего давления воздуха, действующего на эффективную контактную площадь мешочка.
Для повышения точности моделирования EHD во время ходьбы необходимо было получить данные касательно силы шагов, деформации мешочка и силы реакционной пены. Для этого во время тестов были проведены замеры силы шагов с помощью силовых резисторов, установленных на стельках обуви.
Уплощение EHD мешочка при нажатии стопы приводит к нелинейным изменениям его внутреннего объема и эффективной площади контакта. Кроме того, пенополиуретан ведет себя как нелинейная пружина, и его сила реакции расходится при приближении к максимальной деформации.
Предсказания модели и экспериментальные данные для мешочков объемом 6, 35 и 72 мл показаны на 2C и 2D. Графики показывают отличное согласование экспериментальных результатов с моделированием для всех типов устройства.
Вышеописанная модель также использовалась для определения максимальной средней мощности и общей эффективности преобразования энергии.
При любом заданном давлении полезная пневматическая энергия, хранящаяся в ESB, определяется термодинамической доступностью (эксергией) содержащегося в нем сжатого газа. Доступность равна максимальной работе вытеснения, которую можно извлечь, если сжатый газ в ESB обратимо расширяется по отношению к атмосфере. Чтобы определить среднюю выходную мощность EHD, прирост запасенной энергии при каждом шаге был разделен на продолжительность соответствующего шагового цикла.
Для человека весом 55 кг, идущего со скоростью 3 мили в час, система достигла максимальной средней мощности 2.96, 1.94 и 0.44 Вт при использовании EHD объемом 72, 35 и 6 мл соответственно. Сравнение данной системы с другими аналогичными сборщиками энергии ходьбы показало, что разработанная система значительно их превосходит (2E).
Эффективность преобразования устройства определялась как отношение энергии, содержащейся в ESB, когда он достигает полного надувания, к совокупной механической работе, совершаемой силой шагов на EHD до этого момента времени. Оптимизированный вариант EHD объемом 6 мл достигал эффективности преобразования энергии в 23%.
Практические испытания системы
Изображение №3
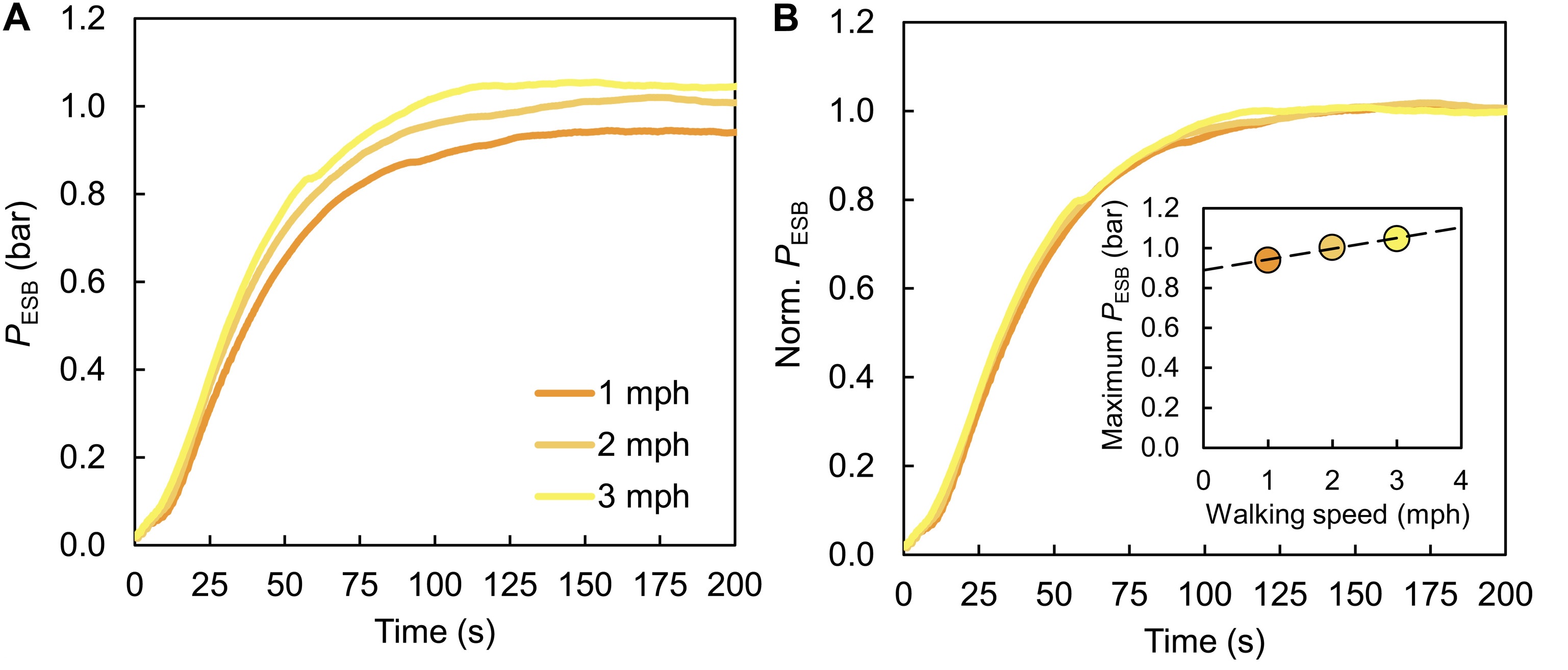
На 3A показан сбор пневматической энергии с помощью EHD объемом 35 мл для пользователя массой 72 кг, идущего с разной скоростью. В то время как 3 мили в час (4.8 км/ч) является типичной скоростью для взрослых моложе 30 лет, более низкая скорость около 1 мили в час (1.6 км/ч) более распространена среди пожилых людей и пользователей с ограничениями подвижности.
Любопытно, но частота шагов (каденс) существенно не меняется в зависимости от скорости ходьбы. Интервал времени между последовательными шагами уменьшился лишь примерно на 30% (с 1.6 до 1.1 с) даже при трехкратном увеличении скорости (с 1 до 3 миль в час). Следовательно, скорость нагнетания давления в ESB не зависела от скорости ходьбы (3B). Кроме того, наблюдалось лишь небольшое (~10%) снижение максимального давления ESB при уменьшении скорости от 3 до 1 мили в час, что может быть связано с известным уменьшением амплитуды шагового усилия на более низких скоростях.
Из этих результатов следует, что разработанное устройство можно эффективно использовать и на пониженных скоростях ходьбы без необходимости вносить какие-либо конструктивные изменения.

Изображение №4
Дополнительно была оценена эффективность EHD объемом 35 мл для 5 испытуемых с массой тела от 52 до 87 кг (4A), которые двигались со скоростью 3 мили в час. Результаты этих тестов показаны на графиках 4B и 4C.
Результаты тестов показали, что конечное давление ESB увеличивается пропорционально массе тела пользователя из-за увеличения максимальной силы пятки, воздействующей на EHD. Этот вывод дополнительно подтверждается механо-жидкостной моделью, которая предсказывает максимальное давление ESB, которое увеличивается пропорционально приложенной силе (4D и 4E).
Комбинация экспериментальных результатов (вставка на 4C) и моделирования (4E) позволяет сделать вывод, что примерно 61% веса тела человека передается через пятку на EHD.
Пневматические аугментации
На следующем этапе исследования ученые показали способность их системы сбора энергии генерировать достаточно энергии для работы двух пневматических приводов, полностью сделанных из текстиля: вспомогательного устройства для подъема руки (изображение №5) и дополнительной руки (изображение №6).

Изображение №5

Изображение №6
Вспомогательное устройство для подъема руки состоит из пневматического сильфонного привода из шести надувных текстильных мешков, прочно пришитых под плечом компрессионной рубашки с длинным рукавом (5A). Под давлением воздуха из ESB исполнительный механизм создает подъемный момент на плече, чтобы помочь пользователю поднять (отвести) руку (5B). Количество мешочков в приводе определяет угол, на который поднимается рука, и объем воздуха, необходимый для цикла срабатывания.
Для количественной оценки крутящего момента, создаваемого устройством для подъема рук, был использован манекен со свободно вращающимся плечевым суставом, чтобы исключить влияние мышечных усилий при тестировании на человеке. Во время испытаний варьировались значения давления, а также массы грузов, подвешенных к руке (5C). Затем измерялся угол поворота плечевого сустава, что позволяло оценить вспомогательный крутящий момент (5D). Было установлено, что подъемный привод может прикладывать крутящий момент более 10 Н·м.
Демонстрация работы подъемного привода.
Дополнительная рука работает с применением системы двух мешочков (6A). Поддерживающий мешочек придает руке механическую жесткость во время использования. Он установлен на ESB и все время остается под давлением. Приводный мешочек образует «хвататель» руки и при повышенном давлении позволяет человеку захватывать и удерживать предметы различной формы. Когда рука не используется, она сдувается до компактных размеров и удобно складывается, чтобы не мешать человеку (6B).
Далее были проведены практические испытания, во время которых человек поднимал и переносил различные предметы с помощью вспомогательной руки (6C и 6D). А на 6E показано, что такое устройство особенно полезно, когда у человека заняты руки (его собственные).
Демонстрация работы вспомогательной руки.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали систему, способную собирать энергию от шагов человека и преобразовывать ее в пневматическую. Затем эта энергия используется для работы специальных приводов, помогающих человеку поднять руки, или устройств, имитирующих руку целиком (вспомогательная рука).
По своей сути, это тканевое устройство представляет собой набор мешочков, внутри которых накапливается воздух и, соответственно, давление. Большим достижением ученых стала высокая эффективность преобразования энергии.
Созданное устройство отличается от своих предшественников легкостью изготовления, небольшой стоимость и легкостью (буквально) в использовании. Подобные системы, как правило, оснащены тяжелыми батареями и множеством сопутствующих компонентов, что делает их использование крайне некомфортным для человека.
Авторы разработки считают, что их труд станет фундаментом для разработки широкого спектра вспомогательных носимых устройств для людей с ограниченными возможностями. К примеру, данная технология может быть использована для перчаток, которые будут помогать человеку сжимать и крепко держать предметы. Также разработка может применяться в компрессионной терапии. В будущем ученые намерены продолжить свою работу, дабы усовершенствовать не только функционал своей разработки, но и ее практичность и внешний вид.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?