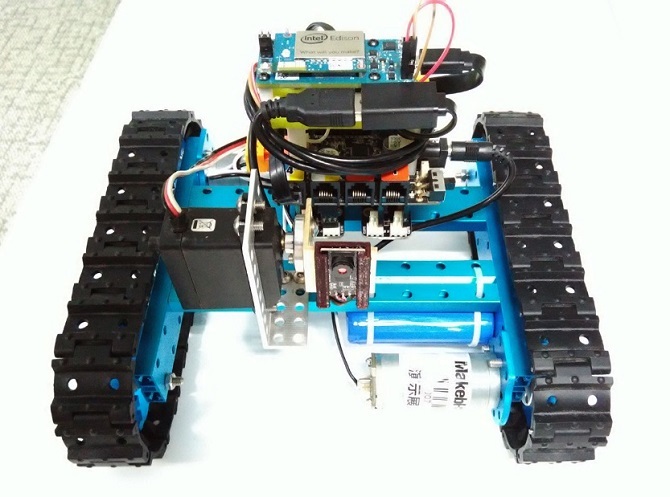
Intel Edison — это умная вычислительная платформа, которая используется для создания различных устройств, в том числе носимых. В мире набирает популярность движение мейкеров, увеличивается число продуктов и решений, которые можно построить с использованием платформы Intel Edison. В этой статье вы вам покажем, как построить видеоровер (вездеход с камерой) с использованием платформы Intel Edison и конструктора Makeblock.
Раз это видеоровер, то он должен иметь камеру. Видео, которое она выдаёт, мы сможем смотреть на компьютере, мобильном телефоне или планшете. Дополнительно мы сможем использовать эти устройства для управления самим вездеходом и камерой.
Приготовление
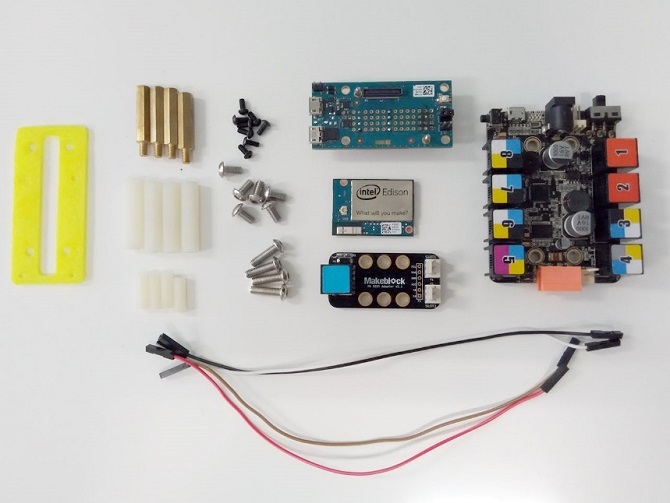
Вот что нам понадобится, чтобы построить видеоровер:
- Плата Intel Edison.
- Главная плата Makeblock.
- Набор Makeblock Starter Kit.
- Винты M4, нейлоновые шпильки M4.
- Винты M2.5, нейлоновые шпильки M2.5.
- Адаптер Makeblock Me RJ25.
- Сервоприводы и уголки для них.
- USB-камера с поддержкой MJPEG и UVC.
- Провода (DuPont).
- Батарея на 7.4 В.
- Напечатанная на 3D-принтере рамка.
- USB-кабель.
Установка механических и электронных модулей
1. Присоедините последовательный порт платы Intel Edison к главной плате Makeblock при помощи проводов.
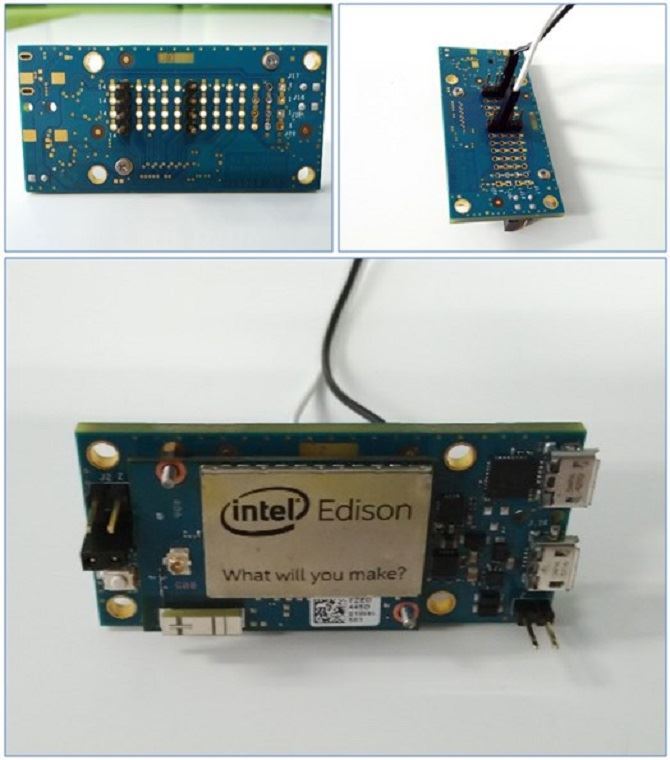
2. Соедините плату Intel Edison и Makeblock, используя шпильки и напечатанную на 3D-принтере рамку.

3. Соедините камеру и сервопривод.
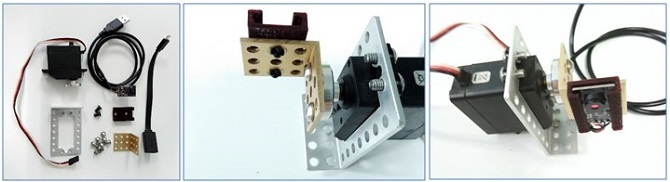
4. Установите главную плату и сервопривод на шасси из набора Makeblock Starter Kit — Track car.
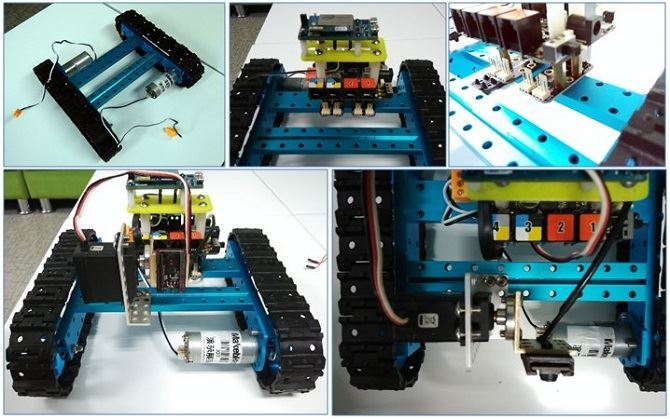
5. Блок питания, который надо использовать с платой Makeblock, должен выдавать, как минимум 7 В. Соедините последовательный порт на плате Intel Edison и сервопривод через адаптер Me RJ25. (Вам надо соединить адаптер Makeblock Me RJ25 через порты 4 и 5 платы Makeblock, а порт 6 присоедините к серводвигателю).
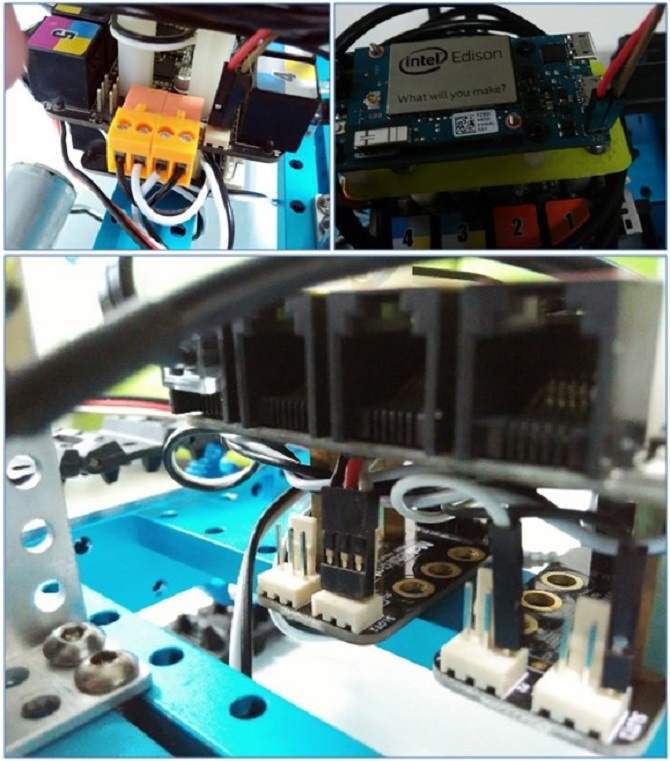
6. Присоедините камеру к хост-порту USB на плате Intel Edison и затем подключите блок питания (7.4 В) к плате Makeblock.
Установка программ
Шаг 1. Чтобы приготовить систему для платы Intel Edison следуйте руководству.
Шаг 2. Подключите edi-cam github.com/xeecos/edi-cam для стриминга видео.
1. Присоедините плату Intel Edison через последовательный порт или по Wi-Fi. Убедитесь, что плата и ваш компьютер находятся в одной локальной сети. Введите:
$ ssh root@myedison.local
root@myedison.local's password:root@myedison:~#Замените myedison именем вашей платы Intel Edison. Когда будет запрошен пароль, используйте тот, который вы задали при конфигурировании платы.
2. Чтобы сконфигурировать репозиторий, добавьте следующие строки к файлу
/etc/opkg/base-feeds.conf:src/gz all http://repo.opkg.net/edison/repo/allsrc/gz edison
http://repo.opkg.net/edison/repo/edison
src/gz core2-32 http://repo.opkg.net/edison/repo/core2-323. Для обновления opkg, введите:
opkg update4. Для установки Git, введите:
opkg install git5. UVC-драйвер:
Убедитесь, что у вас установлена последняя версия образа Yocto, в которую уже входят UVC-драйвера. Старая версия Yocto их не содержит.
6. Для установки ffmpeg перейдите в папку bin. Чтобы запустить скрипт, введите:
./install_ffmpeg.sh 7.Установите пакет Node.js
Перейдите в web/robotjs. Установите пакет Node.js, напечатав:
npm installШаг 3. Запустите приложение.
1. Обновите адрес вебсервиса. Измените значение переменной wsUrl в файле
web/robotjs/client/index.html:// CHANGE THIS TO THE APPROPRIATE WS ADDRESS
var wsUrl = 'ws://myedison.local:8084/';2. Запустите node.js
Перейдите в
web/robotjs и затем запустите командуnode server.jsВы увидите вывод в терминале:
WebSocket server listening on port 8084
HTTP server listening on port 8080
Listening for video stream on port 8082
Stream Connected: 127.0.0.1:52995 size: 640x480
Viewing the video stream3. Откройте в браузере
http://myedison.local:8080. Вы увидите видео и страницу управления.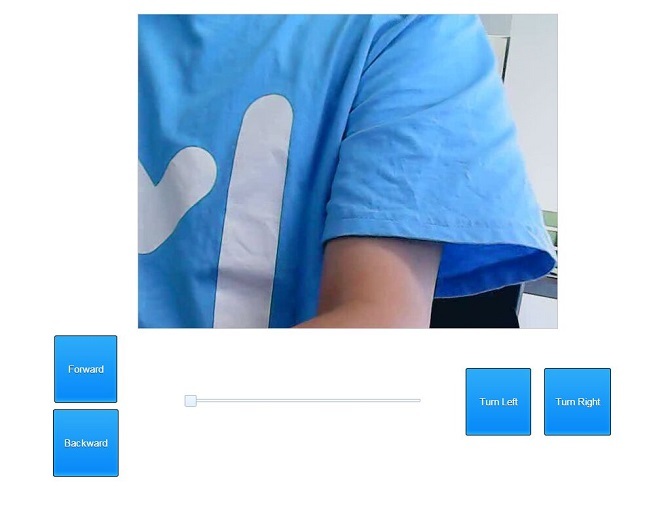
Заключение
В этой статье мы показали вам, как использовать плату Intel Edison, механические и электронные модули Makeblock для постройки управляемого видеоровера. Плата Intel Edison исполняет роль сервера и обеспечивает поддержку сети. Но фактически мощность платы Intel Edison используется не полностью. Попробуйте использовать её для более сложной работы, создавая более удивительные устройства.