В данной статье я постараюсь изложить суть моего проекта и показать процесс, который из наброска робота-собаки перетёк в заказ печатных плат для перчатки
Начало
Перчатка вытекла прямиком из моего проекта Mark, кроме того она является его значимой частью, так что начать следует с него.
Самый первый прототип робота был сделан в один из вечеров лета 2018 года. Это был четвероногий робот, состоящий из 8 сервоприводов SG90 (обычных синих) и кусков гвоздей. Соединялось всё это термоклеем и не имело ни единого шанса на нормальную работу ввиду очень неудачного распределения массы. Но я этого не знал и в тот же вечер заставил его шагать по прямой, а ещё через минут 15 после этого плата, через которую шло питание, задымилась и на столе оказался отпаявшийся линейный стабилизатор (к слову я так и не понял что там произошло).
Починить эту горку термоклея гвоздей и изоленты я так и не смог. В своё оправдание могу сказать, что в тот момент я не умел паять, из электроники понимал только что нельзя замыкать + и -, а о существовании 3D печати и не слышал.
В конце лета заказал себе первый принтер - Anet A8.
Обычный принтер для ознакомления с технологией: рама из акрила, кинематика с "дрыгостолом" и шумные моторы (скорее их драйвера)
Почти сразу после его покупки я освоил tinkercad, где и воссоздал того робота на 4 ногах уже с заменой гвоздей на пластик и добавлением поворотного сервопривода.
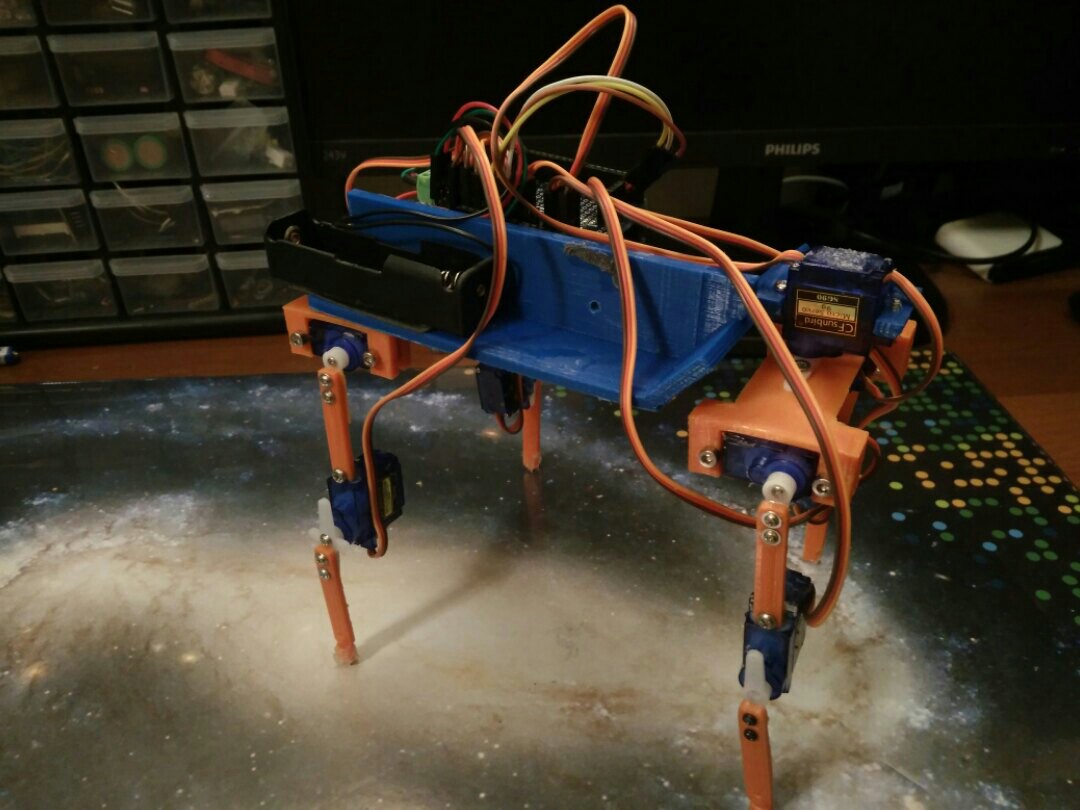
Данное творение так и не заходило, но сподвигло меня на создание других версий. Возможно для моих червероногих роботов сделаю отдельную статью, так что просто дам последовательность из фотографий версий.
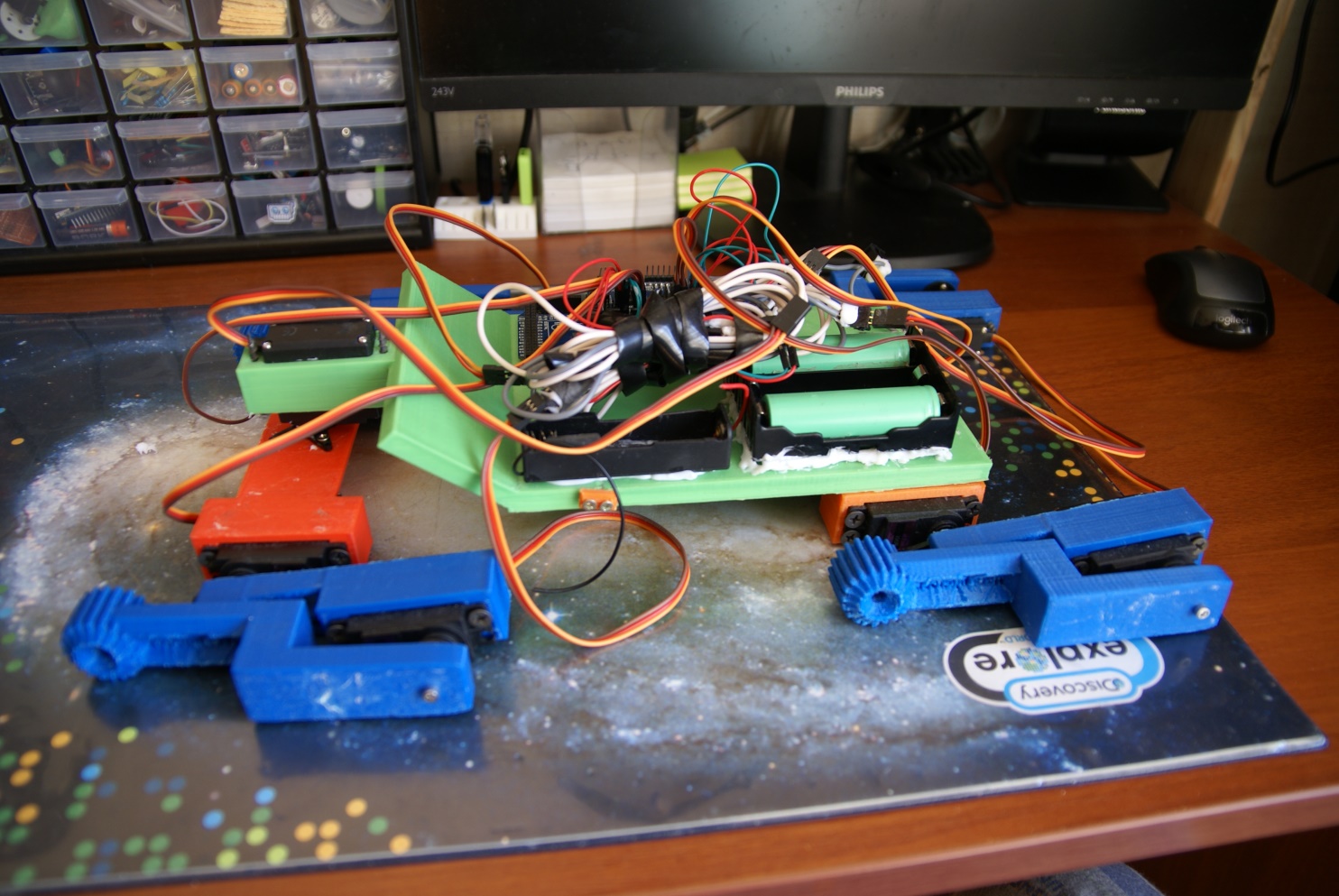

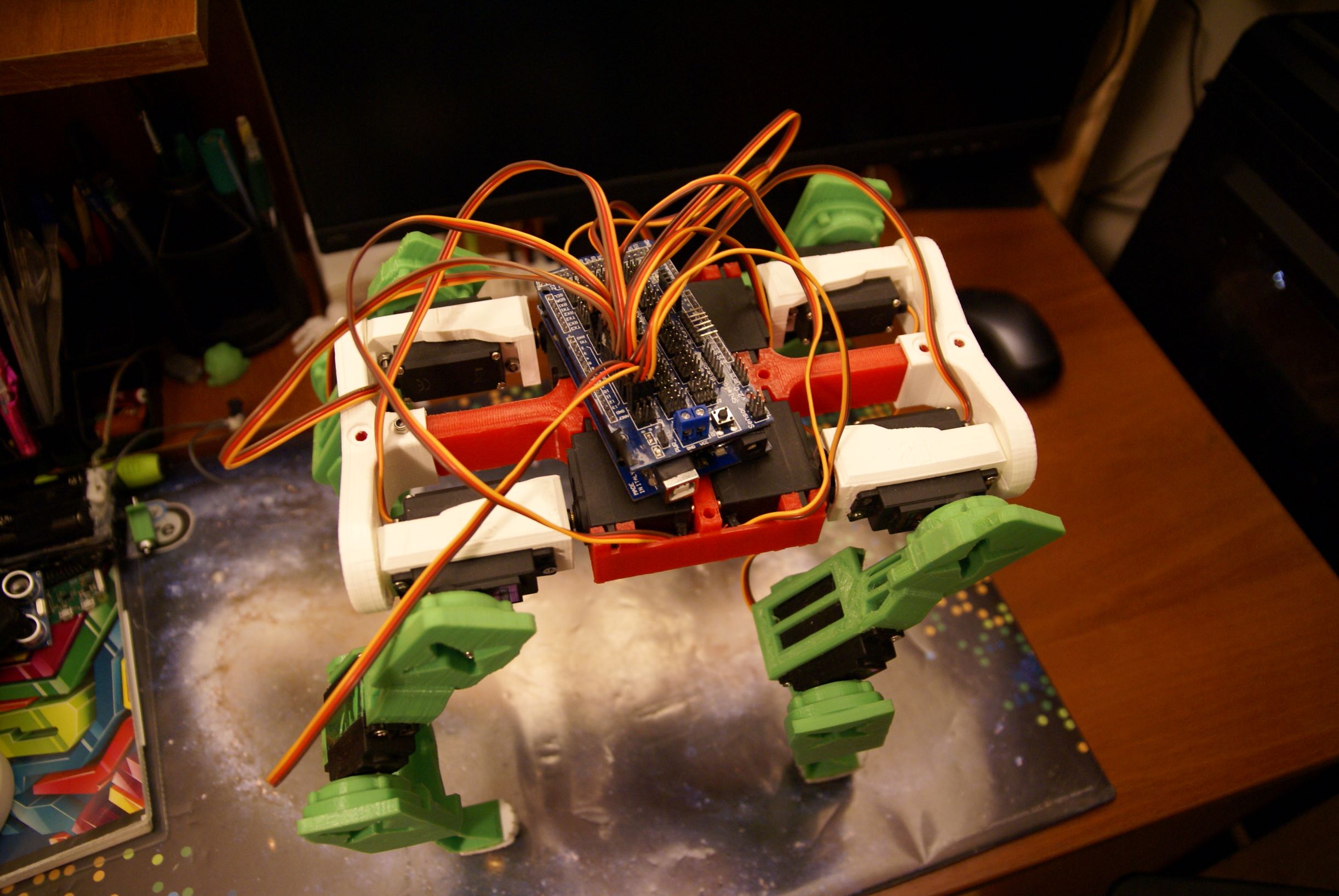
Последняя версия сейчас обзаводится корпусом, но уже нормально ходила и имеет неплохую грузоподъёмность.
С последней и предпоследней версией я победил на 2 мероприятиях и решил расширять серию Mark. Именно так на скорую руку я записал относительно нереальные планы на роботов, включая большие металлические базы для роботов. Но затем я всё же переосмыслил идею серии - можно же сделать реально интересную систему марсоходов, которая может себя показать и на Земле.
Собственно вот как я пока что это позиционирую:
Система роботов Mark - это исследовательский комплекс для автономного исследования местности, в частности - поверхности Марса.?
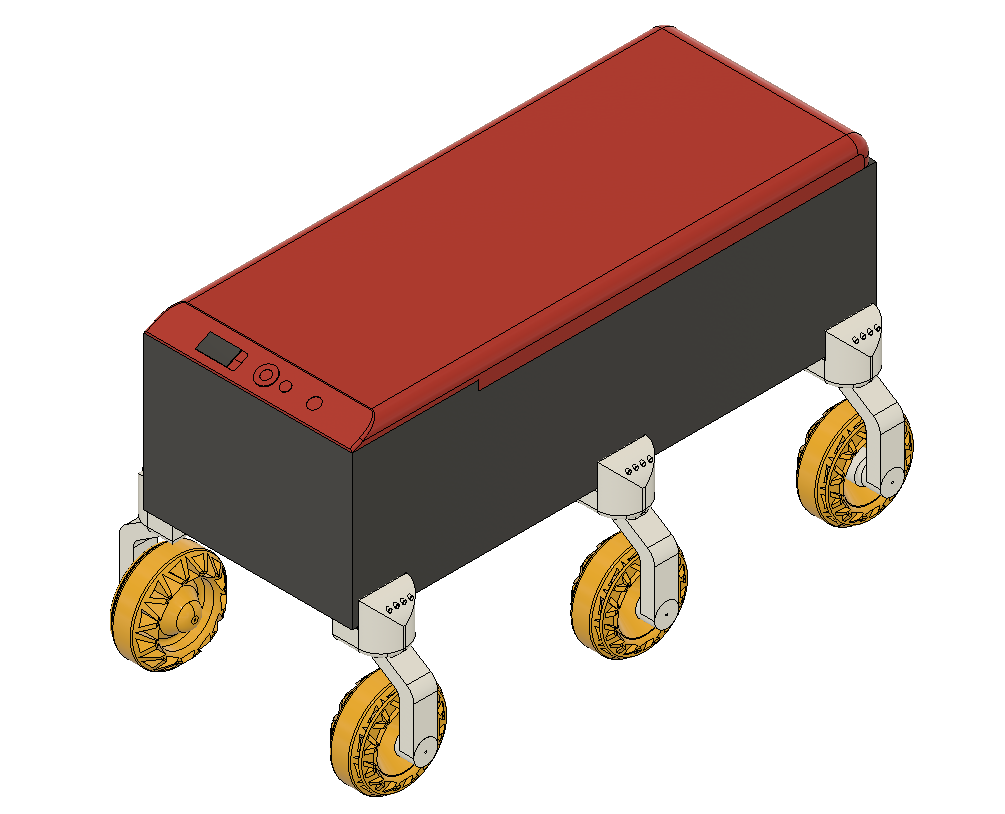
Mark 6 - основная база, предназначен для защиты остальных роботов от неблагоприятных условий.?
Mark 3 - основной разведчик, благодаря ногам может взбираться на уступы, также имеет 4 колеса.?
Mark 4 - шнекоход, также выполняет роль спасательного аппарата. ?
Mark 5 - инсектоид с крыльями и 6 ногами. Может использоваться для изучения очень узких проходов.?
Mark 7 - робозмея, также как и Mark 5 может исследовать узкие проходы и отверстия.?
Mark gauntlet – перчатка для ручного управления всеми роботами.??
Из представленных роботов у меня есть почти готовые Mark 6, Mark 4, ну и собственно Mark 3 и Mark gauntlet.
Из интересного по ним пока есть только основа Mark 6 и его шасси, которые пока печатаются
Разработка перчатки: версия 1
Первая версия перчатки была сделана весной 2020 года и сразу заработала с тестовым стендом, но там мало что могло не сработать: я использовал обычный радиомодуль на 433 МГц с антенной из куска провода. Более подробно там есть в видео (моё первое видео, так что там всё очень посредственно) https://youtu.be/eEAHhr9Suug?t=194

Разработка перчатки: версия 2
Вторая версия была уже через 2 недели, так как она являлась прямым продолжением первой почти во всём.

Тут уже был радиомодуль nrf24l01, несколько режимов работы и выбор канала передачи. На работу перчатки можно глянуть в видео https://youtu.be/P_fq7KkfJrI
Кроме того я решил пойти с этой версией на фестиваль Rukami. С этого момента перчатка уже стала основным направлением работ на 2-3 месяца, что выдало в итоге неплохой результат.
Разработка перчатки: версии 3 и 4
Обе имеют схожий функционал и были сделаны каждая за пару дней.
3 версия:
Функционал:
WiFi модуль esp8266
Радиомодуль NRF24l01+
Мини радиомодуль на 433 МГц
Bluetooth модуль
Акселерометр + гироскоп на перчатке
Панель управления с OLED дисплеем
В целом получилась нормальная версия, но её было бы сложно повторять из-за пайки навесом прямо на корпусе. Вот подобие описания этой версии https://youtu.be/52WvejA6dyk .
4 версия:
Тут уже я взял всё что подходило под концепцию и добавил к этому контроллер Atmega2560
Видео с процессом её создания:
Функционал:
WiFi модуль
Радиомодуль NRF24L01+
Радиомодуль LoRa
MP3 плеер и динамик к нему
ИК- светодиод (для простейшей связи)
Мощные адресные светодиоды сбоку
Акселерометр+гироскоп
Датчик цвета + жестов
Панель управления с OLED дисплеем
На этом можно было бы и остановиться, но я решил пойти дальше и сделать версию 4.2
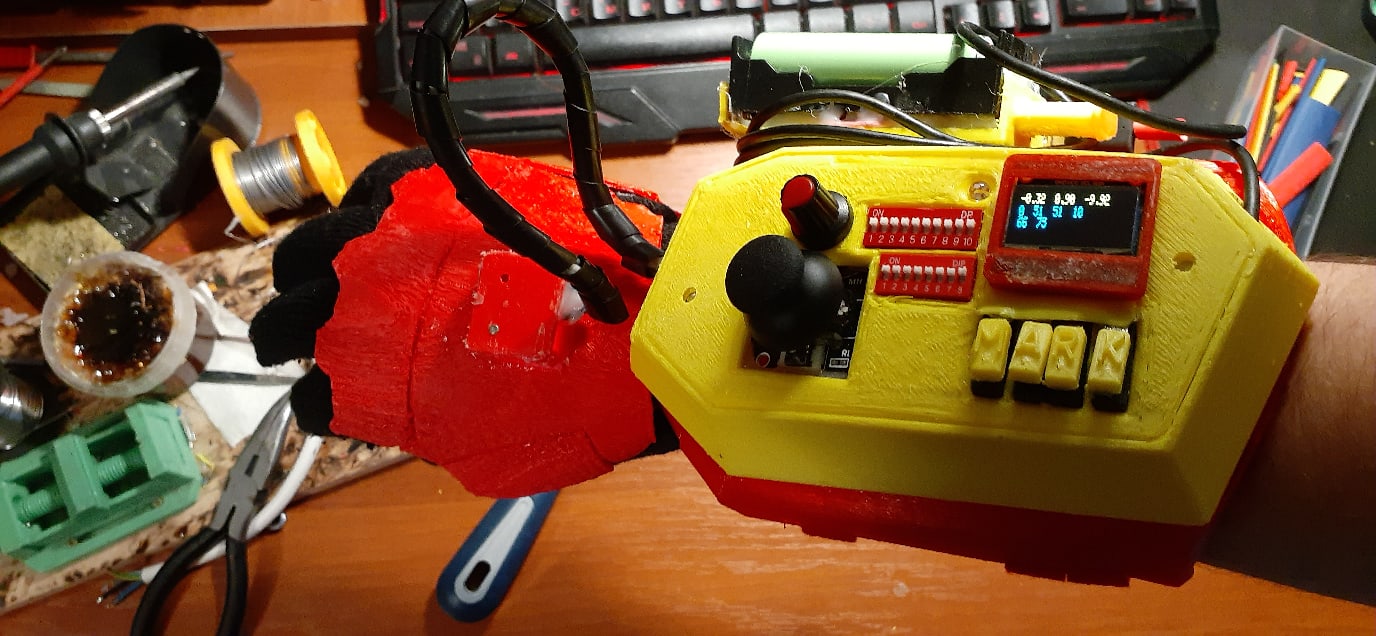
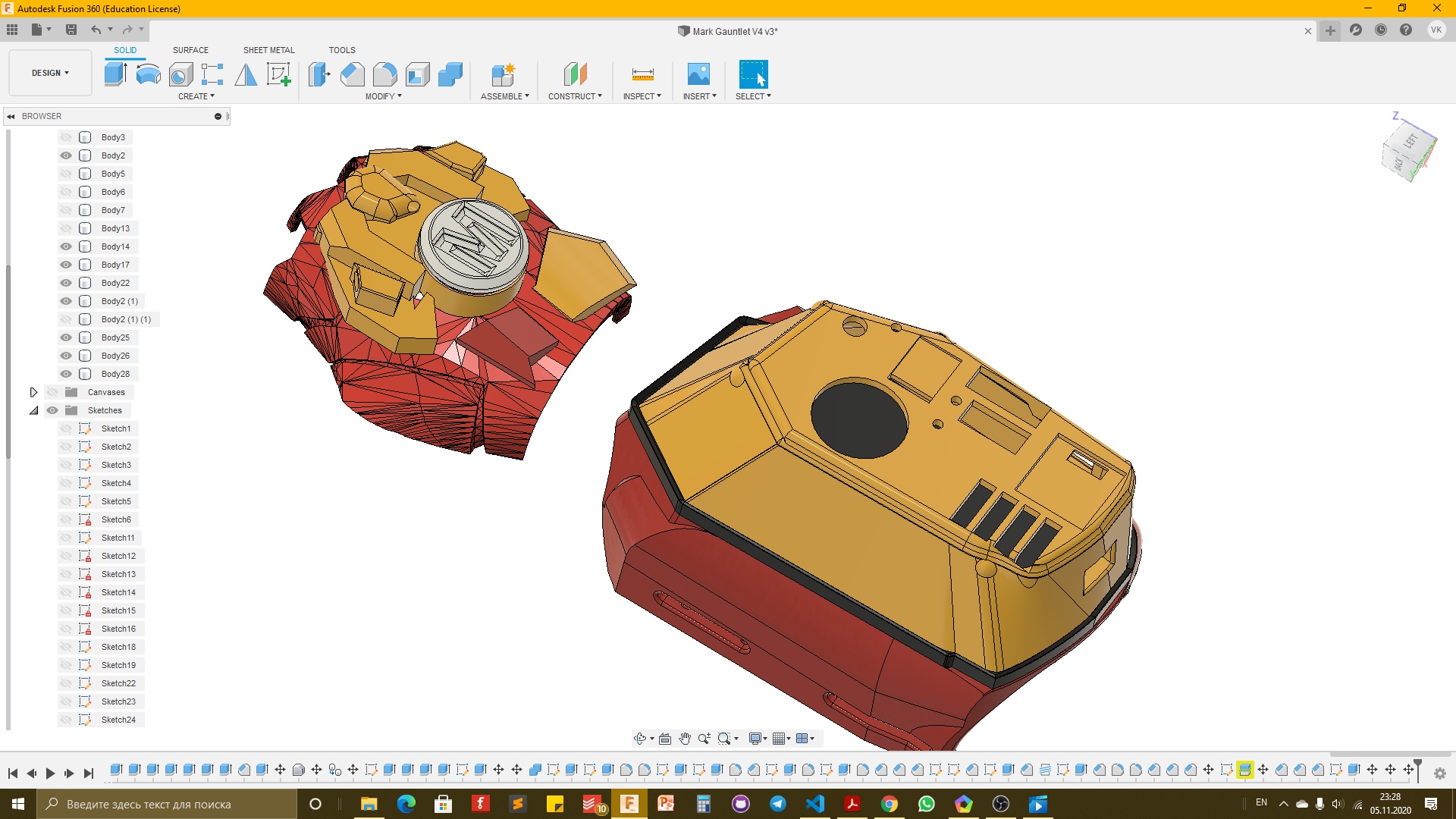
Версия 4.2 или завершающий штрих перчатки
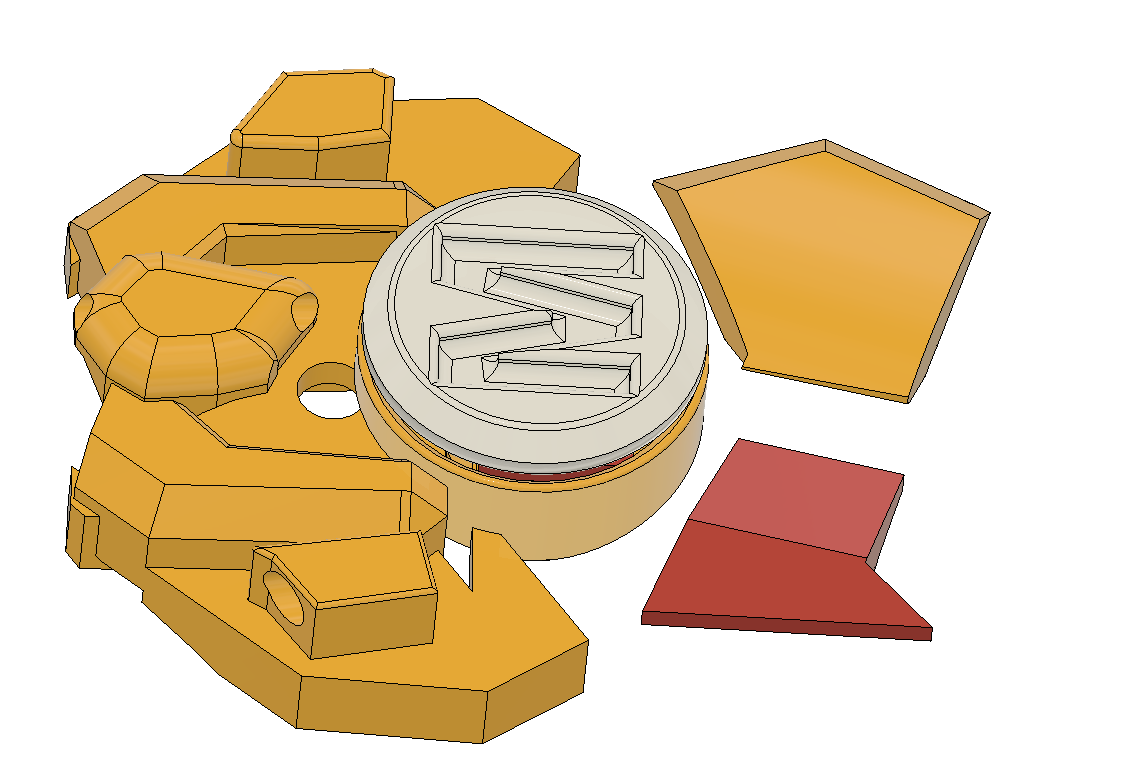
Про уже спроектированные части я расскажу подробно, но платы пока ещё не пришли, так что сборку и результат уже покажу в следующей статье
Основа возвращается с первой версии из-за подходящей геометрии
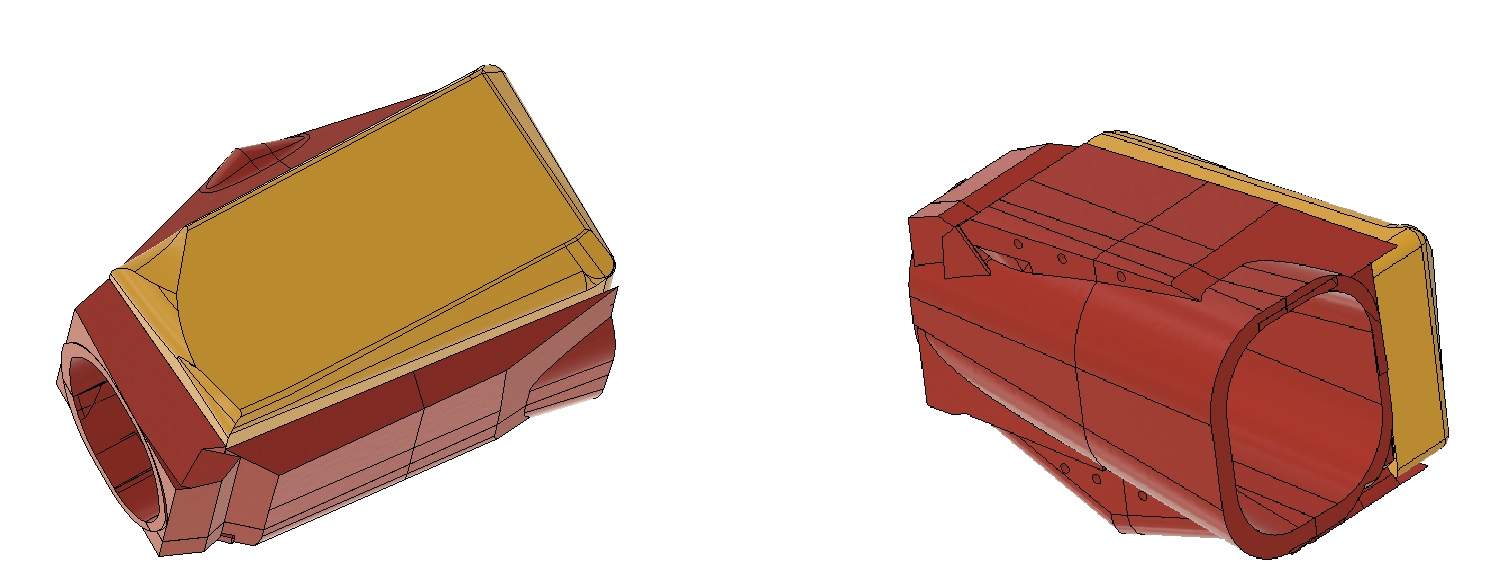
Перчатка скорее всего останется с версии 4
Для питания будут использоваться 3 аккумулятора 18650 на 3.4 А*ч каждый, что обеспечит достаточно большую автономность. Крепиться это будет на плечо.
Почти вся электроника будет распаяна на 2 печатные платы, которые соединятся вместе

Ну и первоначальный код, который будет использоваться для теста на работоспособность. В нём я не использовал пока только LoRa модуль. Ссылка на гитхаб: https://github.com/Madjogger1202/Mark_GauntletV4.2/blob/main/src/main.cpp
Дальнейшее создание этой версии будет уже в ближайшее время.
Тестовый код
/*
Hi stranger, this is main code file for this project
I'm not a 100% programmer, but i can make electronics work,
so i will be grateful if you add any features
it is fully opensource project, so anyone can build stuff based on this code
have a great time reading this badly written working code (^_^)
*/
#include <Arduino.h> // why not...
#include <Wire.h>
#include <SPI.h>
// i have to make all modules work, so i will use some libraris to make life easier
//1) Display. im using 0.96 oled from china, it is not standart at dimentions, bt i like how it looks in final designs :)
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h> // Adafruit librari works 50/50, it depends on display driver (yes, they can hava same names, bt diffrent drivers)
//2) RGB Led panel. LEDs 2812 (8-bit panel)
#include <FastLED.h>
//3) NRF24L01+
#include <nRF24L01.h>
#include <RF24.h>
//4)APDC9960 usefull sensor
#include "Adafruit_APDS9960.h"
//5) LoRa radio sx1278
#include <RH_RF95.h>
//6) MPU6050 gyro + acsel
#include <Adafruit_Sensor.h>
#include <Adafruit_MPU6050.h>
//7) MP3 module
#include <DFPlayer_Mini_Mp3.h>
// first switches connection
int8_t first_sw[8] = { A14, A13, A12, A11, A10, A9, A8, A7 };
// second switches connection
int8_t second_sw[8] = { 38, 37, 36, 35, 34, A6, 32, A15 };
// buttons connection
int8_t buttons[4] = { A3, A1, A0, A2 };
#define LED1 10
#define LED2 11
#define JOY_X A6
#define JOY_Y A5
#define POT A4
#define LORA_D0 42
#define LORA_NSS 43
#define LORA_RST 44
#define NRF_CSN 40
#define NRF_CE 41
#define IR_LED 7
#define R_LED 4
#define G_LED 5
#define B_LED 6
#define WS_LED 45
#define LED_PIN 45
#define NUM_LEDS 8
#define BRIGHTNESS 20
#define LED_TYPE WS2811
#define COLOR_ORDER GRB
CRGB leds[NUM_LEDS];
#define UPDATES_PER_SECOND 100
CRGBPalette16 currentPalette;
TBlendType currentBlending;
extern CRGBPalette16 myRedWhiteBluePalette;
extern const TProgmemPalette16 myRedWhiteBluePalette_p PROGMEM;
RF24 radio(NRF_CE, NRF_CSN);
Adafruit_MPU6050 mpu;
Adafruit_SSD1306 display(128, 32, &Wire, -1);
Adafruit_APDS9960 apds;
volatile bool irqMPU;
volatile bool irqAPDC;
struct allData
{
volatile boolean irqMPU;
volatile boolean irqAPDC;
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
uint8_t led1Mode;
uint8_t led2Mode;
uint8_t redLedMode;
uint8_t blueLedMode;
uint8_t greenLedMode;
uint8_t wsLedMode;
}mainData;
struct radioData
{
bool stable;
int8_t x_acs;
int8_t y_acs;
int8_t z_acs;
uint8_t mode;
uint8_t channel;
uint16_t button;
uint16_t potData;
uint16_t joyX;
uint16_t joyY;
} telemetriData;
void readMode();
void readCh();
void readAcs();
void readJoy();
void readPot();
void readButtons();
void sendNRF();
void sendBL();
void sendLoRa(); // will reliase it soon
void displayInfo();
void FillLEDsFromPaletteColors( uint8_t colorIndex);
void ChangePalettePeriodically();
void SetupTotallyRandomPalette();
void SetupBlackAndWhiteStripedPalette();
void SetupPurpleAndGreenPalette();
// at all it is possible to create up to 256 diffrent modes,
// but if you need more - connect mode counter with channel counter (maybe partly)
void n1Mode();
void n2Mode();
void n3Mode();
void n4Mode();
void n5Mode();
void n6Mode();
void n7Mode();
void n8Mode();
void n9Mode();
void n10Mode();
void n11Mode();
void n12Mode();
void acsel()
{
mainData.irqMPU=true;
}
void gesture()
{
mainData.irqAPDC=true;
}
const TProgmemPalette16 myRedWhiteBluePalette_p PROGMEM =
{
CRGB::Red,
CRGB::Gray, // 'white' is too bright compared to red and blue
CRGB::Blue,
CRGB::Black,
CRGB::Red,
CRGB::Gray,
CRGB::Blue,
CRGB::Black,
CRGB::Red,
CRGB::Red,
CRGB::Gray,
CRGB::Gray,
CRGB::Blue,
CRGB::Blue,
CRGB::Black,
CRGB::Black
};
void setup()
{
for(int i=0;i<8;i++)
pinMode(first_sw[i], INPUT_PULLUP);
for(int i=0;i<8;i++)
pinMode(second_sw[i], INPUT_PULLUP);
for(int i=0;i<4;i++)
pinMode(buttons[i], INPUT_PULLUP);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
analogWrite(LED1, 10);
analogWrite(LED2, 100);
pinMode(JOY_X, INPUT);
pinMode(JOY_Y, INPUT);
pinMode(POT, INPUT_PULLUP);
pinMode(LORA_D0, OUTPUT);
pinMode(LORA_NSS, OUTPUT);
pinMode(LORA_RST, OUTPUT);
pinMode(NRF_CSN, OUTPUT);
pinMode(NRF_CE, OUTPUT);
pinMode(IR_LED, OUTPUT);
pinMode(R_LED, OUTPUT);
pinMode(G_LED, OUTPUT);
pinMode(B_LED, OUTPUT);
pinMode(WS_LED, OUTPUT);
Serial.begin(115200);
Serial2.begin(9600);
mp3_set_serial(Serial2);
mp3_set_volume(10);
mp3_play (1);
if (!mpu.begin())
Serial.println("Sensor init failed");
if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32
Serial.println(F("SSD1306 allocation failed"));
for(;;); // Don't proceed, loop forever
}
display.display();
display.clearDisplay();
display.display();
if(!apds.begin())
Serial.println("failed to initialize device! Please check your wiring.");
apds.enableProximity(true);
apds.enableGesture(true);
radio.begin();
radio.setChannel(100);
radio.setDataRate (RF24_1MBPS);
radio.setPALevel (RF24_PA_HIGH);
radio.openWritingPipe (0x1234567899LL);
radio.setAutoAck(false);
attachInterrupt(0, acsel, RISING);
attachInterrupt(1, gesture, RISING);
Serial1.begin(9600); // bluetooth module connected to Serial1
delay(2000);
FastLED.addLeds<LED_TYPE, LED_PIN, COLOR_ORDER>(leds, NUM_LEDS).setCorrection( TypicalLEDStrip );
FastLED.setBrightness( BRIGHTNESS );
currentPalette = RainbowColors_p;
currentBlending = LINEARBLEND;
// mp3_stop ();
}
void loop()
{
readMode();
readCh();
readAcs();
readJoy();
readPot();
readButtons();
displayInfo();
switch (mainData.mode)
{
case 0:
n1Mode();
break;
case 2:
n2Mode();
break;
case 3:
n3Mode();
break;
case 4:
n4Mode();
break;
}
ChangePalettePeriodically();
static uint8_t startIndex = 0;
startIndex = startIndex + 1; /* motion speed */
FillLEDsFromPaletteColors( startIndex);
FastLED.show();
FastLED.delay(1000 / UPDATES_PER_SECOND);
}
void readAcs() // reading acseleration values from sensor directly to main struct
{
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
mainData.x_acs = a.acceleration.x;
mainData.y_acs = a.acceleration.y;
mainData.z_acs = a.acceleration.z;
return;
}
void readJoy() // i am filering analog values for better perfomance
{
mainData.joyX = (analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X)+analogRead(JOY_X))/4;
mainData.joyY = (analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y)+analogRead(JOY_Y))/4;
return;
}
void readPot()
{
mainData.potData = analogRead(POT);
return;
}
void readButtons() // buttons : 1) 1; 2)0; 3)1; 4)1; and mainData.button == 1011
{
mainData.button = !digitalRead(A1)*1000+!digitalRead(A2)*100+!digitalRead(A3)*10+!digitalRead(A0);
return;
}
void sendNRF()
{
// i am writing telemetri struct only when sending data
// in this case i can track how relevant telemetri data is
telemetriData.stable = mainData.stable;
telemetriData.x_acs = mainData.x_acs;
telemetriData.y_acs = mainData.y_acs;
telemetriData.z_acs = mainData.z_acs;
telemetriData.mode = mainData.mode;
telemetriData.channel = mainData.channel;
telemetriData.button = mainData.button;
telemetriData.potData = mainData.potData;
telemetriData.joyX = mainData.joyX;
telemetriData.joyY = mainData.joyY;
radio.write(&telemetriData, sizeof(telemetriData));
}
void sendBL(String inp)
{
Serial1.print(inp);
return;
}
// void sendLoRa();
void displayInfo()
{
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(WHITE);
display.setCursor(0, 0);
display.print(mainData.channel);
display.print(" ");
display.print(mainData.mode);
display.print(" ");
display.println(mainData.z_acs);
display.print(mainData.button);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.print(mainData.joyX);
display.print(" ");
display.println(mainData.potData);
display.display();
}
void readMode()
{
bitWrite(mainData.mode, 0, (!digitalRead(A14)));
bitWrite(mainData.mode, 1, (!digitalRead(A13)));
bitWrite(mainData.mode, 2, (!digitalRead(A12)));
bitWrite(mainData.mode, 3, (!digitalRead(A11)));
bitWrite(mainData.mode, 4, (!digitalRead(A10)));
bitWrite(mainData.mode, 5, (!digitalRead(A9)));
bitWrite(mainData.mode, 6, (!digitalRead(A8)));
bitWrite(mainData.mode, 7, (!digitalRead(A7)));
return;
}
void readCh()
{
bitWrite(mainData.channel, 0, !(digitalRead(second_sw[0])));
bitWrite(mainData.channel, 1, !(digitalRead(second_sw[1])));
bitWrite(mainData.channel, 2, !(digitalRead(second_sw[2])));
bitWrite(mainData.channel, 3, !(digitalRead(second_sw[3])));
bitWrite(mainData.channel, 4, !(digitalRead(second_sw[4])));
bitWrite(mainData.channel, 5, !(digitalRead(second_sw[5])));
bitWrite(mainData.channel, 6, !(digitalRead(second_sw[6])));
bitWrite(mainData.channel, 7, !(digitalRead(second_sw[7])));
return;
}
void n1Mode()
{
sendNRF();
digitalWrite(LED1, !digitalRead(LED1)); // just blink to understand, that it is working
}
void n2Mode()
{
}
void n3Mode()
{
}
void n4Mode()
{
}
void n5Mode()
{
}
void n6Mode()
{
}
void n7Mode()
{
}
void n8Mode()
{
}
void n9Mode()
{
}
void n10Mode()
{
}
void n11Mode()
{
}
void n12Mode()
{
}
void FillLEDsFromPaletteColors( uint8_t colorIndex)
{
uint8_t brightness = 255;
for( int i = 0; i < NUM_LEDS; i++) {
leds[i] = ColorFromPalette( currentPalette, colorIndex, brightness, currentBlending);
colorIndex += 3;
}
}
void ChangePalettePeriodically()
{
uint8_t secondHand = (millis() / 1000) % 60;
static uint8_t lastSecond = 99;
if( lastSecond != secondHand) {
lastSecond = secondHand;
if( secondHand == 0) { currentPalette = RainbowColors_p; currentBlending = LINEARBLEND; }
if( secondHand == 10) { currentPalette = RainbowStripeColors_p; currentBlending = NOBLEND; }
if( secondHand == 15) { currentPalette = RainbowStripeColors_p; currentBlending = LINEARBLEND; }
if( secondHand == 20) { SetupPurpleAndGreenPalette(); currentBlending = LINEARBLEND; }
if( secondHand == 25) { SetupTotallyRandomPalette(); currentBlending = LINEARBLEND; }
if( secondHand == 30) { SetupBlackAndWhiteStripedPalette(); currentBlending = NOBLEND; }
if( secondHand == 35) { SetupBlackAndWhiteStripedPalette(); currentBlending = LINEARBLEND; }
if( secondHand == 40) { currentPalette = CloudColors_p; currentBlending = LINEARBLEND; }
if( secondHand == 45) { currentPalette = PartyColors_p; currentBlending = LINEARBLEND; }
if( secondHand == 50) { currentPalette = myRedWhiteBluePalette_p; currentBlending = NOBLEND; }
if( secondHand == 55) { currentPalette = myRedWhiteBluePalette_p; currentBlending = LINEARBLEND; }
}
}
// This function fills the palette with totally random colors.
void SetupTotallyRandomPalette()
{
for( int i = 0; i < 16; i++) {
currentPalette[i] = CHSV( random8(), 255, random8());
}
}
// This function sets up a palette of black and white stripes,
// using code. Since the palette is effectively an array of
// sixteen CRGB colors, the various fill_* functions can be used
// to set them up.
void SetupBlackAndWhiteStripedPalette()
{
// 'black out' all 16 palette entries...
fill_solid( currentPalette, 16, CRGB::Black);
// and set every fourth one to white.
currentPalette[0] = CRGB::White;
currentPalette[4] = CRGB::White;
currentPalette[8] = CRGB::White;
currentPalette[12] = CRGB::White;
}
// This function sets up a palette of purple and green stripes.
void SetupPurpleAndGreenPalette()
{
CRGB purple = CHSV( HUE_PURPLE, 255, 255);
CRGB green = CHSV( HUE_GREEN, 255, 255);
CRGB black = CRGB::Black;
currentPalette = CRGBPalette16(
green, green, black, black,
purple, purple, black, black,
green, green, black, black,
purple, purple, black, black );
}




Impuls
Отличное начало. Только не стоит ставить невыполнимые цели для такого проекта. Надо брать что-то одно и начинать потихоньку воплощать в жизнь. Так будет всегда подогреваться интерес. А прыжки от одного к другому приведут к тому, что будет куча проектов, и не один не работает. Удачи в обучении.