На свете существует много хороших библиотек, фреймворков, операционных систем — всего того, из чего разработчики конструируют свои продукты. Иногда в этом разнообразии можно просто утонуть, особенно если ты забрел в неизведанную для себя область. В таких случаях выручают предварительно собранные тематические наборы ПО. У Intel таких опять-таки без счета. Мы хотим представить один, довольно неожиданный, под названием Edge Insights for Autonomous Mobile Robots или, сокращенно, EI for AMR. Как вы понимаете, это для тех, кто решил создать своего мобильного робота.

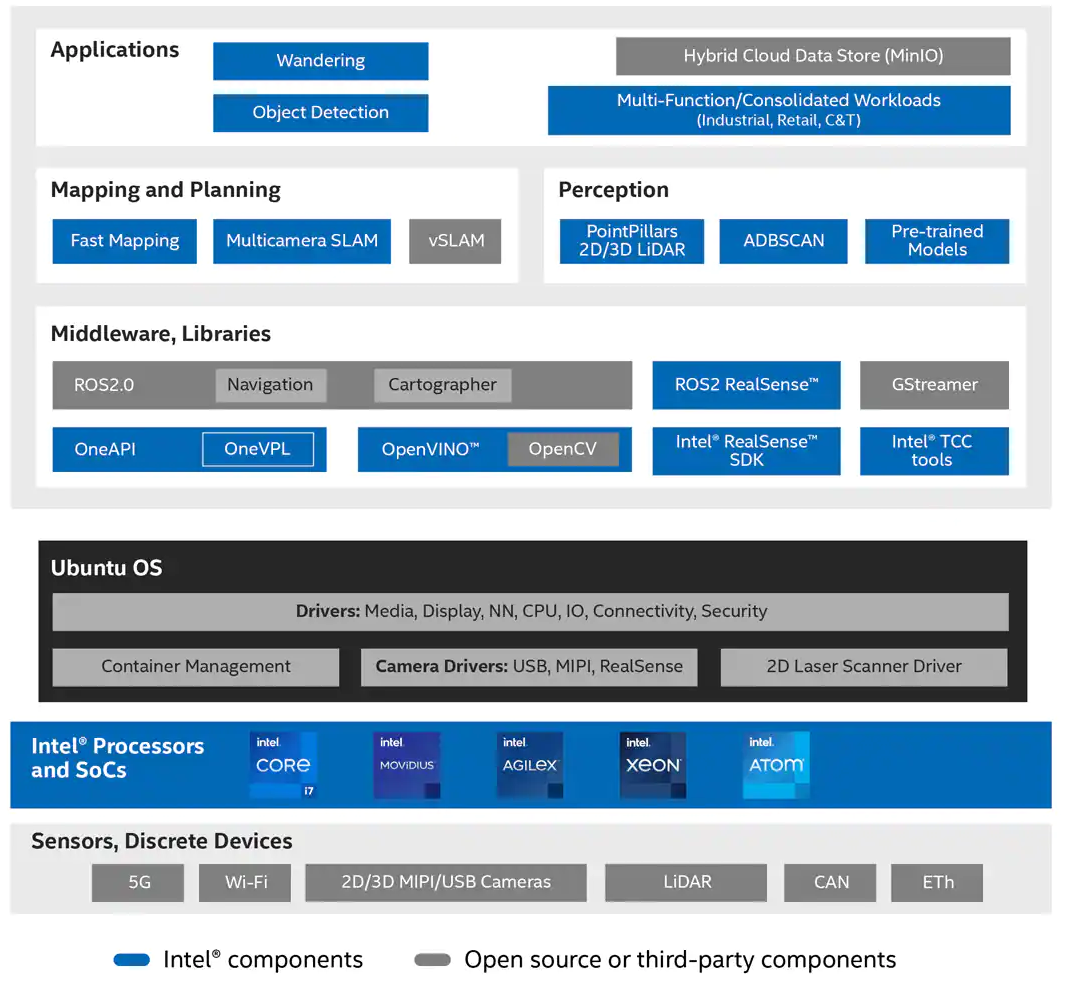
Набор включает в себя средства для разработки, сборки и внедрения приложений для мобильных роботов, построенных на базе операционной системы Robot Operating System 2 (ROS 2). Он имеет модульную структуру с готовыми библиотеками, промежуточным ПО, образцами кода и проч. Подробная схема строения EI for AMR показана на рисунке (кликабельно).

Технически набор представляет из себя три Docker-контейнера, вложенных друг в друга, как матрешки.
Более подробное описание и документация — на сайте проекта.
Набор включает в себя средства для разработки, сборки и внедрения приложений для мобильных роботов, построенных на базе операционной системы Robot Operating System 2 (ROS 2). Он имеет модульную структуру с готовыми библиотеками, промежуточным ПО, образцами кода и проч. Подробная схема строения EI for AMR показана на рисунке (кликабельно).
Технически набор представляет из себя три Docker-контейнера, вложенных друг в друга, как матрешки.
- Контейнер ROS2 включает в себя промежуточное ПО и средства ROS2, Intel RealSense SDK его обертку для ROS2, GStreamer и средства сборки, пакеты ROS2 (Cartographer, Navigation, RTAB_MAP) и приложение Fast Mapping (оптимизированную Intel версию octomap).
- Контейнер OpenVINO включает контейнер ROS2, а также набор средств для разработки OpenVINO, плагины OpenVINO DL GStreamer и демонстрационное приложение Wandering.
- Полный контейнер AMR («AMR Full Flavour») включает контейнер OpenVINO, а также Intel oneAPI Base Toolkit, средство совместимости и профилировщик Data Parallel C++ (DPC++) и анализатор.
Более подробное описание и документация — на сайте проекта.