Самодельный 3D принтер на SCARA механике, v3
Видео работы v3 на скоротях 100+ mm/sec.
Предыдущие версии v1 и v2
Детали о предыдущем принтере можно почитать тут.
Предыдущая механика в OpenScad
Что было не очень при такой механике:
- передача вращения на длину 30 см через шпильку m5 и алюминиевую трубку ID:6 OD:8 давало ошибки из за небольшого скручивания, на конце 30 см доходило до 0.5 градусов — исправимо
- малая жесткость рычагов — исправимо
- дорогая математика — даже оптимизированная не могла просчитываться (на Mega) быстрее чем 50 мм/сек
- Z висящая платформа — 2 подшипника на каждую направляющую решили проблему v1, но жесткость меня не устраивала
V3
v2 версия оказалась фейлом — я даже допускал мысль забросить это направление и собрать обычную простую механику, но желание сделать что то необычное не давало мне покоя.
Собственно после нескольких дней размышлений я решил, что буду продолжать работать в направлении SCARA механик.
Механика рук — в классической SCARA один из моторов стоит на конце первой руки, это добавляет вес на выносе и требования к жесткости руки, собственно этого очень хотелось избежать, v1 и v2 решали эту проблему, для v3 это решается рычагом и короткими ремнями.
Видео (очень короткое) как это работает
Для хоуминга под каждый рычаг были добавлены микро-выключатели

Ось Z — в этот раз решил что у меня будет статическая платформа а сама механика будет двигатся по Z, в этом есть несколько плюсов:
- статическая платформа, которую можно свободно отделить от базы и переместить заменить, да и на крайний случай просто сложить и положить в сторону чтобы не мешала
- как не странно жесткость базы от этого только выиграла так как в ее структуру добавились две 8mm направляющие
- компактность
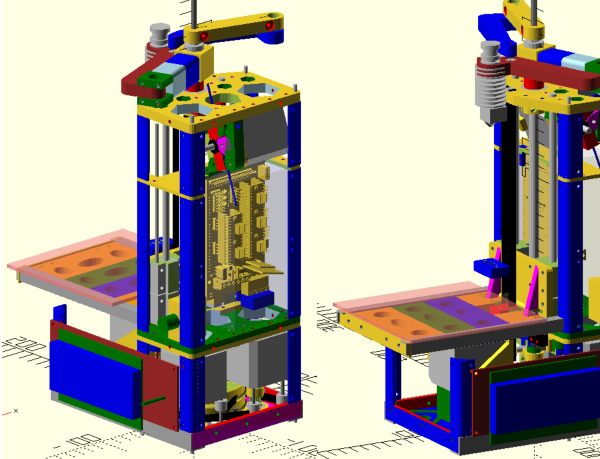
Вид в разрезе (без home переключателей)

Z min переключатель

Все в сборе

Электроника — В этот раз решил вынести электронику (Ramps 1.4+DRV+LCD2004) в отдельный блок — тоже не спроста — после третьей сборки/разборки принтера мне надоело это делать и я соорудил бокс который будет кочевать от одного моего проекта к другому (само собой надо будет менять только прошивку)
Экструдер — так как механика позволяла гонять на скоростях 100+ простого экструдера стало не хватать — пришлось спроектировать Geared экструдер.
OpenScad файлы (scarav3.scad)
Прошивка
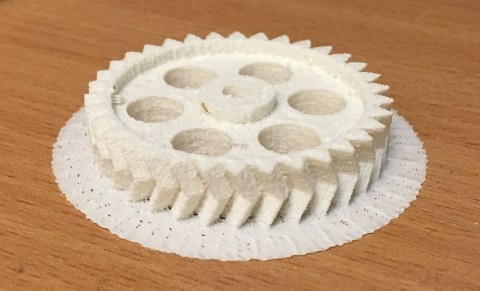
Результат
Результатом я более чем доволен, качество печати на данном принтере меня устраивает.
Из проблем можно отметить что есть небольшая волна по осям XY (из за дискретности шаговиков и количества шагов разбиения — сейчас 50)
Дальнейшие идеи:
- Больший коэффициент передачи хотя бы x5 (сейчас x4)
- Уменьшения веса рук и увеличение их жесткости — сделаю из алюминия
- E3D v6 — уменьшения веса
- Меньшего размера шаговики — текущие на 4кг*см немного избыточны
- Уменьшение длины ptfe трубки — очень важный показатель не для прямого экструдера — есть даже идея повесить экструдер на ось вращения рук — сработает при условии если предыдущий пункт будет выполнен
- Уменьшение габаритов — по высоте наиболее приоритетно
Комментарии (16)

Nad73
05.05.2016 16:25+1А раз такая механика, почему программа обхода работает с Х У не в цилиндрических координатах?

PavloG
05.05.2016 16:30Есть два подхода
1) По принципу работы прошивки marlin, для не картезиан:
- G код на входе картезиан
- Планировщик разбивает пути на маленькие сегменты
- По сегментам происходит вычисление углов поворота
- Шаговики отрабатывают
2) Препроцесинг картезиан G кода в углы поворота
Я выбрал первый вариант как самый простой и понятный.rPman
05.05.2016 20:50Я немного удивлен, вы пишете что математика для ardurino уже тяжелая? Там что одна линия превращается в 100500 отрезков?
Второй вариант выглядит как то даже попроще, особенно если делать это снаружи принтера, хотя и не так удобно.PavloG
05.05.2016 21:03Да — но тут простой и понятный пайплайн — модель->stl->slic3r->repetierhost (последних два шага это 2 в одном)
Математика тяжелая была для v1/v2 — для текущей конфигурации чуть тяжелей чем для дельты но пока успевает для нужной мне скорости.

kreexus
05.05.2016 16:44По поводу жесткости рук вопрос, на сколько они жесткие? Не появляется ли раскачки печатающей головки в вертикальной оси? Прогибания?
PavloG
05.05.2016 17:01Толстая рука сделана довольно жестко (в ней 4 шпильки m4 с натягом).
Тонкие руки — не достаточно — немножко пружинят в xy плоскости — надо было чуть прочнее их делать
Прогибание только при приложении усилия и на печати не влияет
А вот раскачка в XY координатах иногда возникает и это причина недостаточной жесткости и возможно ремней.

ilya42
05.05.2016 17:55А у этой схемы есть какие-то преимущества перед классической, или просто интересно было попробовать?
PavloG
05.05.2016 18:10+2Преимущества:
- Круто смотрится
- Cкорость
- Компакность
- Фиксированая платформа
Можно долго хвалить свое болото.
Но на самом деле, я не советовал бы SCARA для первого принтера — у меня просто так сложилось.
Моя цель (отдаленная) это универсальность(фрезер pcb/принтер) с такой механикой.
kotomyava
08.05.2016 02:07А в чём профит делать фрезер-то с такой механикой? Сделать её достаточно жёсткой будет очень не тривиально.
Вообще лучше тут сделать два разных прибора — у них очень разные требования. Одному нужна скорость и лёгкость, другому жёсткость и массивность, даже для графировки по текстолиту, не то что для фрезеровки.
С такой кинематикой, разве что сверлилку для плат с шустрым позиционировнием получится сделать.
Ну и экструдер для пасты, и расстановщик элементов, кстати. =)
PavloG
08.05.2016 14:25Я писал про фрезер pcb — жесткости должно хватить
А для алюминия и т д я делаю обычный портальник.kotomyava
11.05.2016 15:59Жёсткость там тоже очень нужна, даже если гравировать дорожки — она сильно влияет на точность.
А если именно фрезировать текстолит, так это не сильно проще, чем алюминий — нагрузки сравнимы.
К тому же, для фрезерования таскать придётся уже не экструдер, масса шпинделя значительна, и если скорости будут приличные, будет и большой момент, и соответственно, большие деформации и большие ошибки.
Ну и не забываем о том, что фреза не проживёт долго, если будет «дробить». И качество обработки будет соответствующим.
NTP
Как обстоят дела со скоростью перемещения хот-энда при печати? Велики ли ускорения на «прямой»?
PavloG
Печатающая голова весит очень мало.
XY Acceleration 3000, XYJerk 20
При печати получалось 60мм/сек 0.3 соплом с geared экструдером — быстрее соплом на 0.3 у меня уже появлялась недоэкструзия.
NTP
Прошу простить за слишком лаконичный вопрос выше. Хотел поинтересоваться насколько нелинейна скорость (есть ли ускорения) при печати, скажем, прямой линии? Ведь очевидно, что при подобной конструкции неизбежны «тригонометрические» ускорения при постоянной угловой скорости шаговиков и, как следствие, неравномерность хода хот-энда на всей длине пути… Вы как-то это компенсируете?
PavloG
Этим занимается прошивка — но надо твикать
Прошивка позволяет ограничить ускорение и скорость верхним пределом — если подобрать максимальную ограничивающую скорость и укоренение такими, чтобы они совпадали с медленными участками и ограничивались на участках быстрее то можно получить равномерные данные на все участках стола. (в видео специально эти пределы поставлены на высокие)