
В свободное от основной работы время я занимаюсь детским образованием, несколько лет вел занятия по робототехнике и программированию, а совсем недавно мы с коллегой открыли свой образовательный центр. Узнав о фестивале, я сразу захотел принять в нем участие, собрал команду из ребят, которые не разъехались на лето, взял отпуск на две недели, и мы начали работу.
Над проектом мы работали вчетвером, практически всё ребята сделали самостоятельно, я занимался только закупкой необходимых материалов и организацией, а также помогал с некоторыми техническими вопросами.
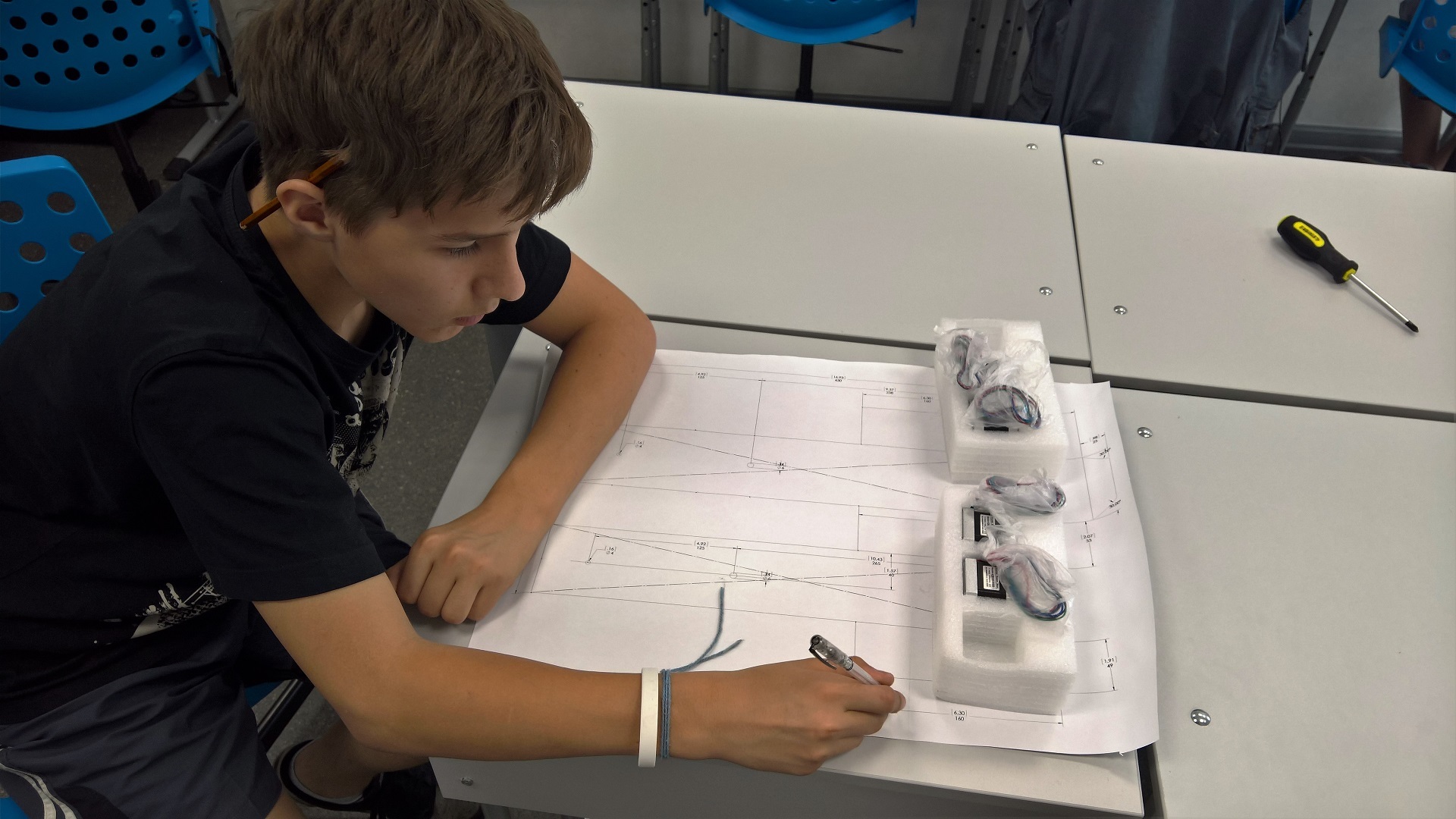
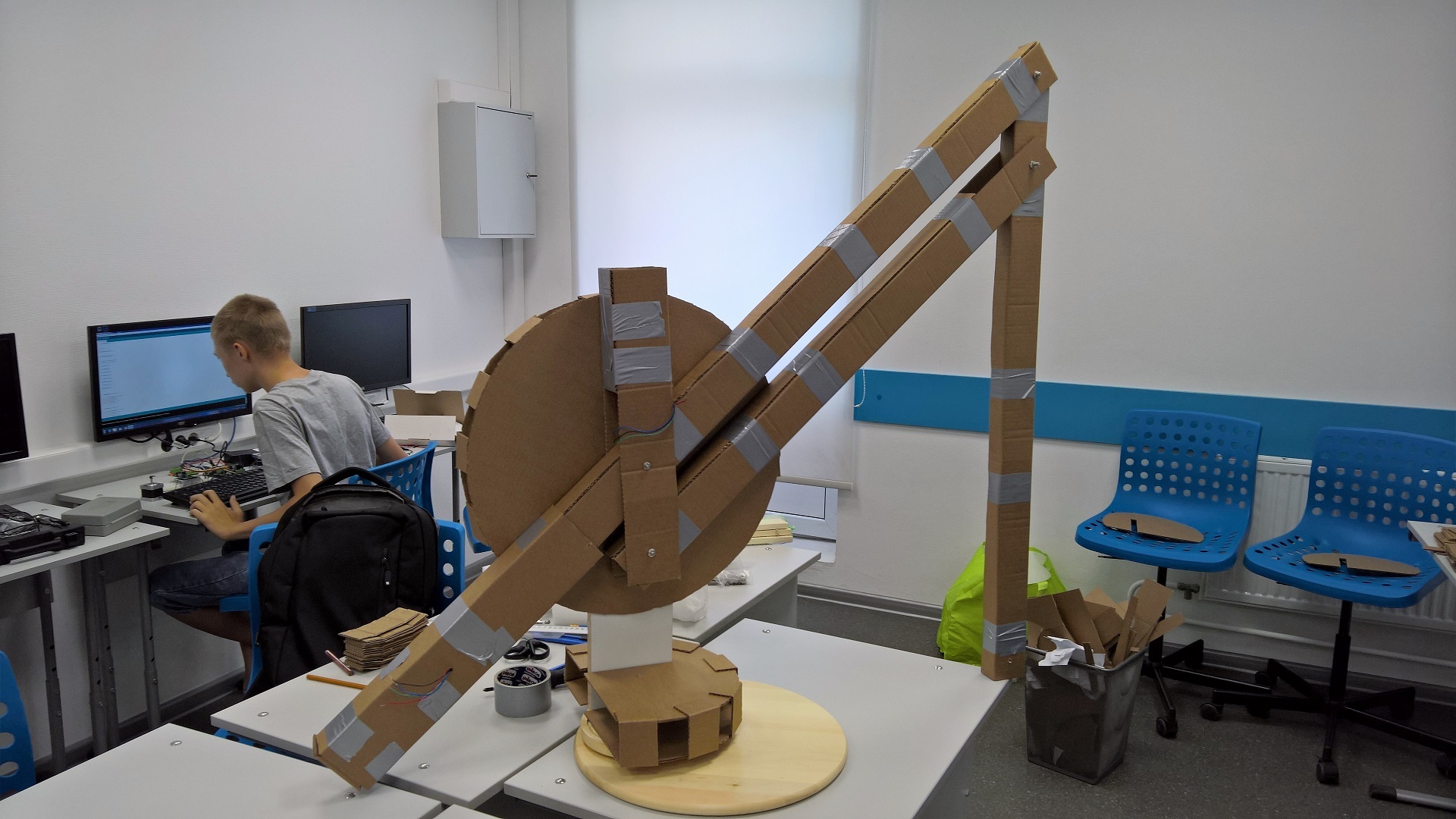
Идею проекта и чертежи для него мы нашли в интернете и немного модифицировали. Манипуляторы представляют собой конструкцию из картона с деревянной основой, достигают двух метров в длину. Каждый манипулятор имеет три степени свободы, движение осуществляется с помощью шаговых двигателей, управление — джойстиками с пульта, связь по радиоканалу. Для подсветки используется светодиодная лента. Ниже несколько фотографий с тем, что получилось в итоге, ссылки на код и чертежи доступны в конце статьи.



Список необходимых материалов для одного манипулятора
- Картон (два листа 2x1м)
- Скотч (три рулона)
- Клей, способный хорошо склеить картон
- Несколько деревянных панелей для основы
- Три шаговых двигателя Nema 17 (42BYGHW609 с моментом 4кг*см)
- Три драйвера для управления двигателям (TB6560)
- Зубчатый ремень GT2 (1 метр)
- Три шкива для зубчатого ремня
- 2-3 пружины для натяжки ремня
- Два контроллера (Arduino Uno для манипулятора и Arduino Nano для пульта)
- Два радио-модуля (nRF24L01+)
- Винты, гайки, саморезы
- 30-35м двужильных проводов
- Два аналоговых джойстика
- Источник питания на 6-10А (мы использовали компьютерный блок питания 450вт)
- Два метра светодиодной ленты (необязательно)
Бюджет проекта (на два манипулятора) получился около 20 000 руб, большую часть стоимости составили двигатели и драйверы.
Сборка
Деревянная основа
Для начала необходимо собрать деревянную основу, на которой будет держаться картонная часть манипулятора.

Для основы используется вращающийся поднос из Икеи, который называется (кто бы мог подумать) Снудда. К подносу саморезами прикручена деревянная панель 40х13см.
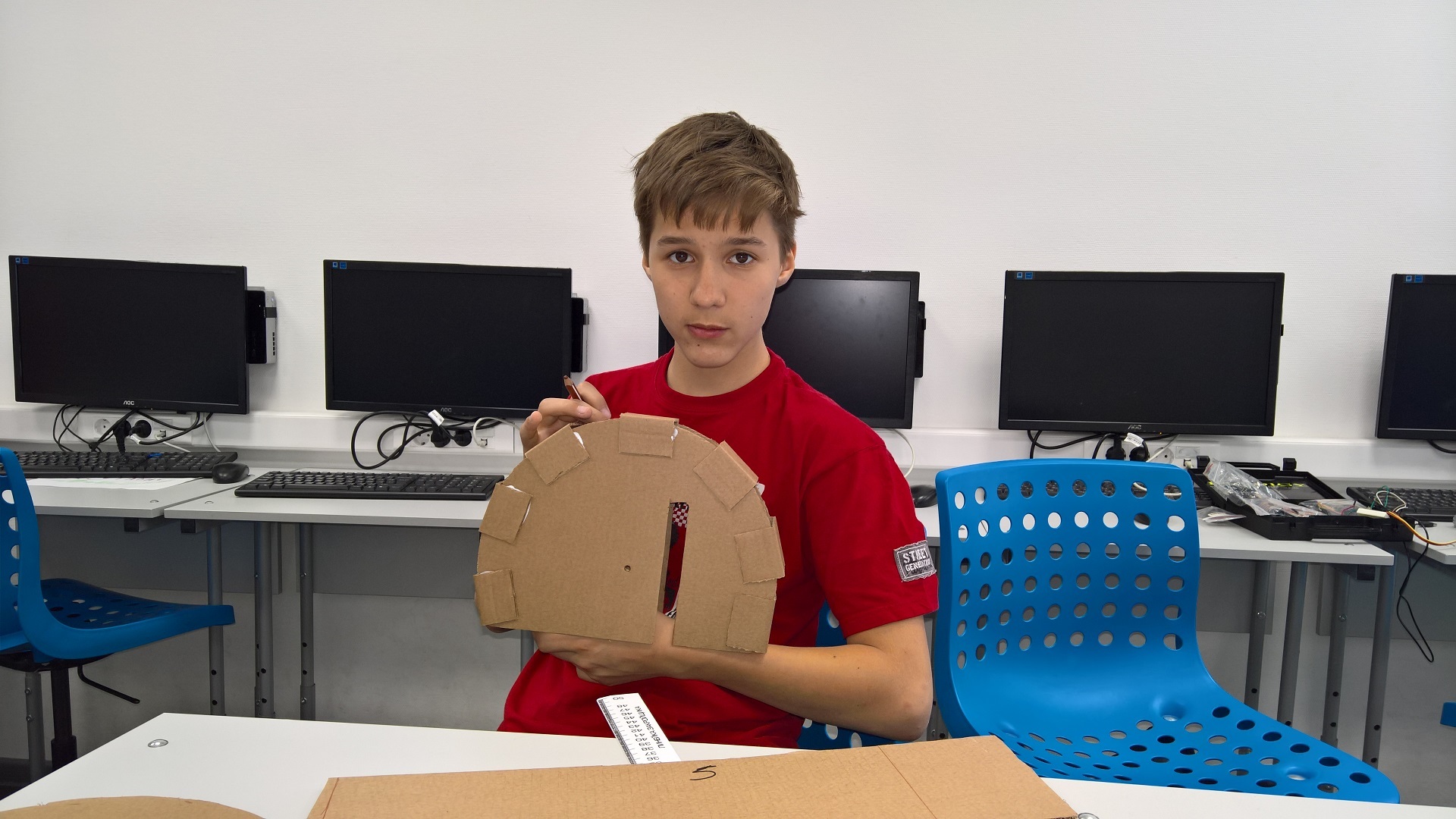
Основные картонные части
Далее из картона нужно вырезать все необходимые части по чертежам, прикрутить к ним два двигателя. Прямоугольные части скрепляем скотчем, полукруглые склеиваем, по фотографиям понятно, о чем речь.



Собираем вместе картонные части манипулятора и деревянную основу, для этого в панели нужно просверлить отверстие, в которое можно вставить винт.
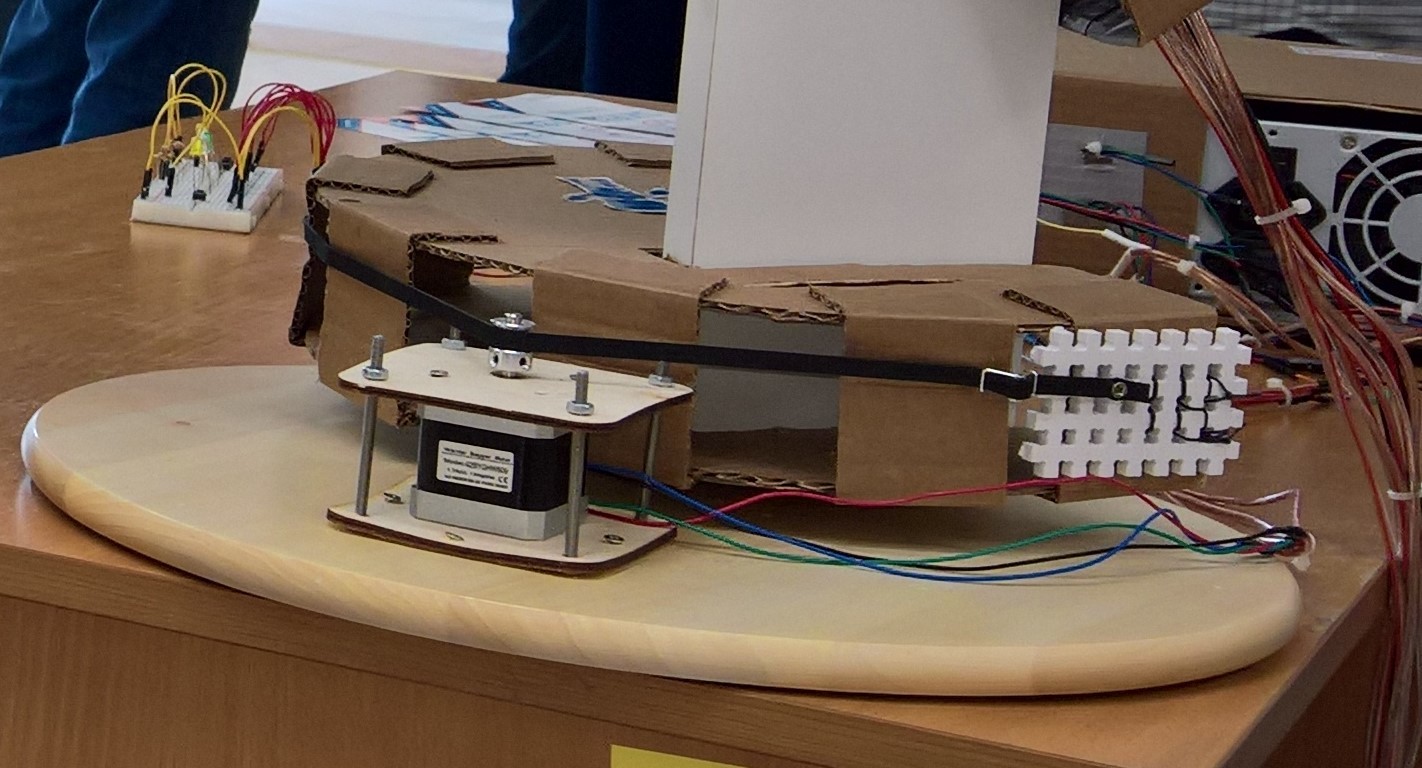
Система вращения манипулятора
Основные сложности у нас возникли на этом этапе. По изначальной задумке, на вал двигателей должна была крепиться пластиковая муфта. Далее к краю корпуса привязывается толстая нитка, наматывается несколькими витками на муфту и закрепляется с другой стороны.

Фото из оригинального проекта
Первые проблемы возникли с муфтой. Я нигде не смог купить подходящую за адекватные деньги (нам нужно было шесть штук, по три на каждый манипулятор), тогда мы решили распечатать ее на 3D-принтере. Мой коллега сделал модель и попытался обратиться в какую-нибудь из студий по 3D-печати, но мы так и не нашли никого, кто смог бы оперативно распечатать модель, а время поджимало. Помимо проблемы с муфтой была еще одна: во время тестов нитка постоянно запутывалась и переплеталась. Из-за этого натяжения то ослабевало, то усиливалось, заставить манипулятор нормально работать не получилось.
Мы думали, как решить эту проблему, ребята предлагали разные идеи, в итоге остановились на варианте с зубчатым ремнем. Купили ремень и шкивы для двигателей, начали пробовать, но и тут было множество проблем. Изначально мы пытались закрепить ремень прямо на картоне, из-за чего он начинал деформироваться и рваться. Также из-за неровностей картонного корпуса натяжение ремня было разным в разных местах, из-за чего двигатели постоянно проскальзывали. В итоге ремень мы закрепили на деревянную деталь от конструктора, ее приклеили и пришили нитками к картону. Проблему с натяжением ремней частично решили пружинами.
Электроника
Для управления шаговыми двигателями используются драйверы TB6560, они обеспечивают ток до 3А, чего вполне хватает. Для связи с пультом управления используется радио-модуль nRF24L01+, в качестве контроллера – Arduino Uno. В качестве источника питания мы выбрали компьютерный блок питания на 450Вт, он обеспечивает необходимую мощность и при этом стоит гораздо дешевле обычных импульсных блоков. Из минусов можно отметить большой размер и активную систему охлаждения, что в нашем случае не играет существенной роли.
Для электроники был сделан корпус из картона, в нем закрепили блок питания, Arduino, радио-модуль и драйверы. Вывели провода с разъемами для подключения двигателей наружу, это позволило удобно транспортировать корпус отдельно от манипуляторов.


Пульт управления
Пульт представляет собой два джойстика, в одном из них задействованы оси X и Y, в другом только X, они используются для управления вращением манипулятора. По клику на одном из джойстиков меняется цвет подсветки. Для пульта также был сделан корпус из картона, источник питания — батарейка Крона.

Программирование
Параллельно с разработкой железной части, ребята писали прошивку для контроллеров манипулятора и пульта. С пульта по радиоканалу посылается номер команды, манипулятор ее принимает и выполняет. Список возможных команд:
- Поворот по часовой стрелки
- Поворот против часовой стрелки
- Поднять центральную часть
- Опустить центральную часть
- Поднять конечную часть
- Опустить конечную часть
- Открыть/закрыть захват
- Сменить цвет подсветки


Захват
Свой захват мы изготовить не успевали, поэтому купили готовый на сервоприводе. В тестах он у нас заработал, но на фестивале при подключении – нет. Быстро починить его так и не получилось, условия фестиваля не позволяли нормально разобраться. Мы предполагаем, что дело в том, что из-за большой длины провода (около 3м) затухает импульс модуляции сервопривода.
В итоге, окончательную сборку манипуляторов мы с коллегой заканчивали в 2 часа ночи, в день, перед фестивалем (детей отпустили раньше).


Манипуляторы вплотную поместились на задние сидения машины, разбирать их не пришлось.
Фестиваль
На фестивале мы были два дня, ребята демонстрировали свою работу и давали «порулить» посетителям, в основном детям. Поскольку захват у нас не работал, придумали конкурс: нужно было сбить манипулятором бутылки с водой, это было не очень просто, учитывая проскальзывания ремней, но почти все справлялись, за что получали конфетку. Судя по расходу конфет, наш стенд за два дня посетило около 400 человек, несколько раз наш проект снимали для различных изданий и у ребят брали интервью, в том числе мы засветились в новостях на первом канале.

















Исходный код и чертежи доступны на github: https://github.com/MikD1/CardboardManipulator
Комментарии (11)

sprutspb
20.07.2016 11:04+2Похвально. Все же еще остались люди которые занимаются детьми. я думал, что всё это умерло в СССР.

rekod
20.07.2016 13:41+1Следующим этапом можно собрать уже ЧПУ из картона: youtu.be/JEORbiF4ReU
Смех смехом, а ЧПУ'шность — она от механики может рассматриваться независимо,
т.е. дети реально получат навык делать станки (работа с CAD, экспорт STL, а затем уже и с G-code промышленным разберутся) и роботов.
А как Вам удаётся работу с ведением кружка робототехники совмещать? как нашли помещение? как составили образовательную программу?
Может статью про это напишете? буду очень ждать!
Создать «клуб робототехники» — это почти моя мечта, но времени найти на это не получается, увы.MikhailD
20.07.2016 13:47+1Интересный проект, спасибо, подумаем.
Совмещать деятельность по организации центра и фуллтайм работу, на самом деле, довольно сложно. Мой коллега уделяет все свое время центру, занимается юридическими и организационными вопросами, без него, конечно, вряд ли бы что-то получилось. Мы планируем полноценный запуск к сентябрю, если все будет хорошо, обязательно напишем про это.


kaze_no_saga
21.07.2016 11:00Эх, завидую этим детям. Шикарным делом занимаетесь, товарищи!
Кстати, сколько эти штуки весят, с электроникой и без, не записывали?MikhailD
21.07.2016 14:38Специально мы их не взвешивали, но по ощущениям один манипулятор, без блока с электроникой, весит 3-4 кг.
rekod
22.07.2016 23:13А можно видео работы манипулятора в статью добавить?
Одно дело — фото, а другое когда в динамике…
Вот пример с модулем линейного перемещения, сделанным мной за полчаса «из г*на и палок»: https://youtu.be/mY6fB5BOUpU
webzuweb
Молодцы!
MikhailD
Спасибо!