«Вот пока вы тут сидите, там, на Аляске,
ионы атомов сливаются и образуют плазмоиды!» (С) Неизвестный
В последние несколько лет то и дело появляются публикации, пресс-релизы и даже стартапы на тему навигации под водой. Дело в том, что задача подводной навигации до сих пор не решена так же удобно, как над водой: сигналы GNSS под воду не проникают, а существующие инерциальные системы либо недостаточно для этого точны, либо чрезмерно дороги.
Я хочу рассказать, как мы втроем и за один год сделали подводный GPS с нуля.
В общем, давно уже назрела потребность в простой системе подводного позиционирования. Нет, я вовсе не хочу сказать, что систем подводного позиционирования не существует, напротив, их просто пруд пруди: от супер серьезных HiPAP (норвежской фирмы Kongsberg) и GAPS (французской IXBLUE), целой линейки систем от немецкой EvoLogics.de, американской Teledyne, английской Sonardyne, до относительно простых Tritech MicronNAV, израильской UDI (одна из очень немногих систем, которую могут использовать водолазы). Чтобы вы представляли, одна из самых простых систем позиционирования MicronNAV стоит в среднем 18000 евро, и предназначена для работы с ТНПА, на дистанциях всего лишь до 500 метров. А израильский UDI- который изначально разработан только для водолазов, больше решает задачу передачи кодовых сообщений (до 14 предустановленных сообщений) и очень простые функции навигации – единственной возможностью которой является обеспечение выхода водолаза к маяку (просто выход на маяк — без географических координат, без возможности выхода в произвольную точку акватории и т.п.).
Читатель наверняка уже заметил, что в списке нет ни одного российского производителя. Все верно, его нет в списке ввиду того, что в настоящее время ни одна российская компания не производит устройств подводной навигации, которые можно приобрести и успешно применять – и это несмотря на то, что навигационная задача – очень актуальна для проведения абсолютного большинства водолазных работ!
Водолазу под водой непросто – среда недружелюбна, количество воздуха в баллонах ограничено, очень часто плохая видимость, не дальше вытянутой руки, да ещё и водяной столб давит. Любой водолаз вам скажет, что глубина ошибок не прощает, и верно говорят, что проще запустить людей в космос, чем отправить на подводном аппарате на шесть тысяч метров глубины.
Взгляните на список производителей подводных аппаратов, которых больше, чем известных мне автомобильных брендов. Можно, однако, порадоваться, что в этом списке есть один отечественный производитель, пусть и выпускающий только малые аппараты осмотрового класса.
Но даже опуская на глубину подводный аппарат – мы не решаем основной проблемы:
Можно получить с аппарата видео в реальном времени и в HD качестве, но почти всегда очень непросто понять, где конкретно находится аппарат под водой, где находится всё то, что вы в роскошном качестве увидели на мониторе. И это мы не говорим о том, что дорогостоящий аппарат, ввиду отсутствия понимания, где он находится, можно разбить о судно при всплытии.
Почему же навигационная задача под водой столь непросто решается?
Радиоволны исключаем, свет в реальных мутных водоёмах далеко не распространяется – остаётся звук.
Желающие могут ознакомиться с замечательной статьей, в которой хорошо описаны основные проблемы распространения звука в воде.
Множество различных компаний, индивидуальных разработчиков и прочие творческие коллективы пытаются решить эту задачу. Какие-то из предлагаемых решений очевидно не имеют никакого отношения к реальности, например тот же Navimate — обещают аж с 2009 года, пока что ничего, кроме рендеров. Cпециалисты уже сплясали на их костях, но на разных дайверских форумах этот «стартап» то и дело всплывает.
Есть еще интересный концепт — инерциальная навигационная система, внимательно за ними следим, но пока дальше распечатанного на 3D-принтере прототипа, лежащего на столе дело не двинулось. И еще пару клонов NaviMate — Концепт №1 и Концепт №2.
Физика одна для всех, и можно очень подробно расписать, почему на сегодняшний день нельзя сделать систему с теми характеристиками и в форм-факторе, которые заявляют уважаемые «стартаперы», но сейчас не об этом.
Есть еще много систем с GPS-антенной на кабеле с поплавком, например — один и еще один но давайте будем честны – это не «подводная навигация», да и ходить под водой с поплавком на верёвочке – далеко не всегда возможно.
Тема подводного GPS не оставляет равнодушными и ребят из DARPA — но пока, кроме красивых картинок нам ничего не показывают.
«Ну и? » — топнет по в сердцах по водной глади ногой читатель. Видимо эта задача сродни квантовой телепортации человека или (ну как минимум!) отправке того же самого человека на Марс консервативными способами (на большой ракете).:

Хочется шепотом добавить, как гениальный Этуш в «Иван Васильевич меняет профессию»: «Я не пьющий!»
Читатель, пойми меня правильно — я не ищу рекламы, подводная навигация вещь очень специфическая, и все, кому она нужна, мне и так известны.
Я просто хочу чтобы ты порадовался, что это сделали мы, это отечественная разработка — от начала и до конца.
Я хочу, чтобы ты не думал о «ржавых ракетах», а что если сильно постараться, то можно многое сделать.
А теперь я крупными мазками набросаю, как все это происходило.
Итак, кратко о том, какие типы навигационных систем бывают, об их плюсах и минусах:
Системы делятся по т.н. относительной длине измерительной базы. Длина оценивается относительно размеров траектории позиционируемого объекта.
— Ультракороткобазисная (УКБ, USBL — ultrashort base-line). По сути это позиционирование на основе определения направления на источник сигнала. Система в общем случае состоит из пеленгационной антенны и маяка-ответчика. Антенна посылает запросный сигнал, маяк отвечает на него, по оценке времени распространения сигнала вычисляется наклонная дальность, антенна определяет направление прихода сигнала — вертикальный и горизонтальный углы, и таким образом определяет местоположение маяка-ответчика относительно себя. Среди минусов таких систем — жесткие требования к геометрии антенны, необходимость учета ее положения в погруженном состоянии — влияние качки, если антенна опускается на кабеле — ее крутит, антенна наклоняется, на нее требуется устанавливать магнитный компас. Плюс ко всему — маяк должен обладать хорошей энергетикой, в случае использования нескольких маяков — их опрос производится последовательно. Это не сильно похоже на GPS, но на этих принципах работают наши с вами уши.
— Короткобазисная (КБ, SBL — short base-line). Если элементы пеленгационной антенны разнести подальше друг от друга, например, повесить по бортам судна — получится короткобазисная система. Поскольку расстояния между преобразователями значительны, можно уже аккуратно попробовать непосредственно решать задачу определения местоположения источника сигнала. На самом деле элементы такой разнесенной антенны могут быть источником сигнала, а прием можно осуществлять на маяке, в этом случае координата будет вычисляться на позиционируемом объекте. Это уже очень близко по сути к GPS — при такой организации системы маяки могут быть полностью акустически пассивными, теперь они становятся навигационными приемниками, как и GPS/ГЛОНАСС приёмники. Однако размер измерительной базы в этом случае оказывается недостаточным для получения приемлемой точности — здесь можно провести параллель с измерением параллакса в астрономии — измерительная база в данном случае имеет размеры диаметра орбиты земли, и чем дальше находится звезда, до которой измеряется расстояние, тем менее заметно ее смещение.
— Длиннобазисная (ДБ, LBL — Long base-line). Фактически, это та же самая короткобазисная система, но ее элементы располагаются независимо друг от друга на дне, или устанавливаются на плавучие платформы. В данном случае все как бы совсем хорошо — размеры измерительной базы достаточны, сами по себе базовые станции (элементы навигационной измерительной базы) функционально похожи на спутники GPS/GLONASS.
Минусы такой системы состоят в неудобстве ее развертывания, а в случае с донной базой — сначала нужно точно определить координаты этих донных станций — и вот мы там же, откуда и начали.
Но, как говорил один из знакомых моряков: «Делай хорошо — плохо само получится».
Если мы собираемся делать подводный GPS, то пусть он и будет максимально похож на GPS, знаете, миллионы машин и людей со смартфонами ходят по земле, в большинстве случаев попадают туда, куда им надо и никто не измеряет расстояние до спутников GNSS методом запрос-ответ, спутники тоже заняты просто излучением без затей с приёмом обратного сигнала, и все в общем хорошо — все довольны.
Каков требуемый функционал такой системы? Он весьма бесхитростен — нужно знать где ты находишься относительно каких-либо заранее заданных ориентиров — точек интереса (POI — point of interest), хочется иметь свой трек, записанный в погруженном состоянии для разбора полетов постфактум, неплохо было бы, увидев что-то интересное на дне — пометить точку, к которой в последствии можно было бы вернуться. Чего такого фундаментального нужно, чтобы это стало возможным? Всего-навсего — знать свои абсолютные географические координаты в погруженном положении. Умея это, все остальные задачи переходят в разряд тривиальных.
На самом раннем этапе, когда наша система находилась в форме «набросков на салфетках», мы остановились на схеме LBL.
В нашей системе требуется ровно четыре «спутника» — буя, оснащенных GPS/GLONASSприемниками для определения собственных координат и дальнейшей передачи этих координат неограниченному числу навигационных приёмников. При этом неограниченное (Как у взрослых! Как в настоящем GPS!) число приемников, смогут по полученным данным определять собственное местоположение – но не относительно буёв, как в SBL, а в географических координатах!
Если коротко, система состоит из четырёх плавучих буев-ретрансляторов GNSS-сигнала и любого числа подводных навигационных приемников;
Навигационный приемник в нашей системе акустически пассивен — он никогда не излучает (только так можно обеспечить работу неограниченного числа акустических приемников в одной акватории), приемник «слушает» буи, принимает их сообщения и решает задачу нахождения собственного положения на основе географических координат буев. К географическим координатам добавляем расчёт глубины – и вуаля, мы точно знаем, где в воде находится наш навигатор!
Впервые система была представлена на МВМС-2015 (Международный военно-морской салон), традиционно проходящем в ЛЕНЭКСПО в Санкт-Петербурге. Система вызвала бурный интерес у «подводной» публики; После этого ещё были многочисленные поездки на различные водоёмы нашей необъятной родины. В каждой поездке мы собирали фактический материал, на основе которого совершенствовали как «железную» составляющую системы, так и алгоритмы.
Теперь давайте посмотрим, как всё это работает.
Навигационный приёмник водолаза
Навигационный приёмник, работая с географическими координатами, для водолаза выводит на экран расчётные азимут и дистанцию до выбранной точки назначения – заданной перед погружением, сохранённой уже в ходе погружения, либо на один из четырёх буёв-ретрансляторов.
Соответственно, мы должны оснастить приёмник компасом, чтобы водолаз имел возможность двигаться по указанному прибором азимуту. Однако товарищи водолазы раскритиковали нас за использование электронного компаса – устройство оказалось весьма капризным, требующим частой калибровки и неточным. В итоге в первой же версии устройства от электронного компаса мы отказались; профессиональные водолазы всегда погружаются с механическим компасом, проблема движения по азимуту была решена.
На картинке изображён один из вариантов – навигационный приёмник закреплён на водолазной панели с механическим компасом:

А вот как выглядел навигационный приёмник первой версии:

Работал он не очень – были проблемы с надёжностью приёма (маленькая антенна, установленная на самом приборе), в итоге достаточно быстро появилась версия 2, которая изображена на первом рисунке.
Изначально было два разных решения: для роботов (ТНПА/АНПА) и для человека. Вариант для робота представляет собой цилиндр на кабеле, залитый в полиуретан. Вся электроника навигатора находится внутри приёмной антенны, на это компоновочное решение мы получили наш первый патент. И вот с ним как раз все было в порядке — этот вариант работал как и планировалось. Вот он, жёлтенький, на фотографии:

С водолазным вариантом же постоянно были проблемы — меньшая чувствительность, бОльшие ошибки, пропадание приема. Мы провели кучу проверок, моделирований, экспериментов и пришли к выводу, что в большей степени на такое положение дел влияет расположение — маленькое пьезокольцо водолазного приемника (черный цилиндр на корпусе навигатора) часто затеняется водолазом.
В конце концов приняли решение скрестить два устройства — приемом занимается навигатор робота, раз у него так это хорошо получается. Приёмник этот мы выносим либо на баллон (на спину водолаза), либо на плечо, либо закрепляем на водолазной панели. От старого навигатора остаётся только «показометр» — интерфейсная часть в виде отдельного блока, который может крепиться, как на панель, так и на руку. По результатам реальной эксплуатации переписали и интерфейс – убрали лишние детали, важные параметры сделали крупнее.
Вот так это выглядит в руках настоящего водолаза:

Навигационные буи
Теперь поговорим о навигационных буях, которые обеспечивают всё это подводное благолепие. Как уже говорилось выше, навигационный буй представляет собой штуку, которая получает сигнал GNSS, и ретранслирует его в воду.
Первая версия буёв выглядела так:

Практика использования позволила выявить ряд досадных недостатков, самый неприятный из которых был связан с частым «затеканием» буя.
Затекания–это прерванные испытания и работы, недовольные пользователи, вот это вот всё.
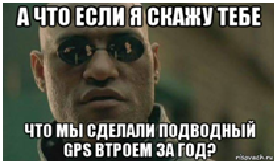
Быстро выяснилось, что буи банально затекали через китайские GNSS-антенны (такая «мигалка» на крышке). Антенна ввинчивалась в крышку буя, но затекала не через места прилегания (мы не жалели герметика и резины), а через собственный корпус. Плюнув на все, решили сделать свою антенну и спрятать ее под крышкой буя, исключив из конструкции лишние места протечек. На рисунке ниже как раз новый комплект буев в родном, специально изготовленном для них кейсе:
Вот эта выпуклость на крышке — там теперь живет плата GNSS-приемника. До кучи добавили вторую лампочку и расположили их обе так, чтобы они светили почти в горизонтальной плоскости –предыдущий вариант расположения было не очень хорошо видно с воды.
Но самые главные изменения касались внутреннего софта. Всю эволюцию качества навигационных данных я покажу на серии следующих рисунков.
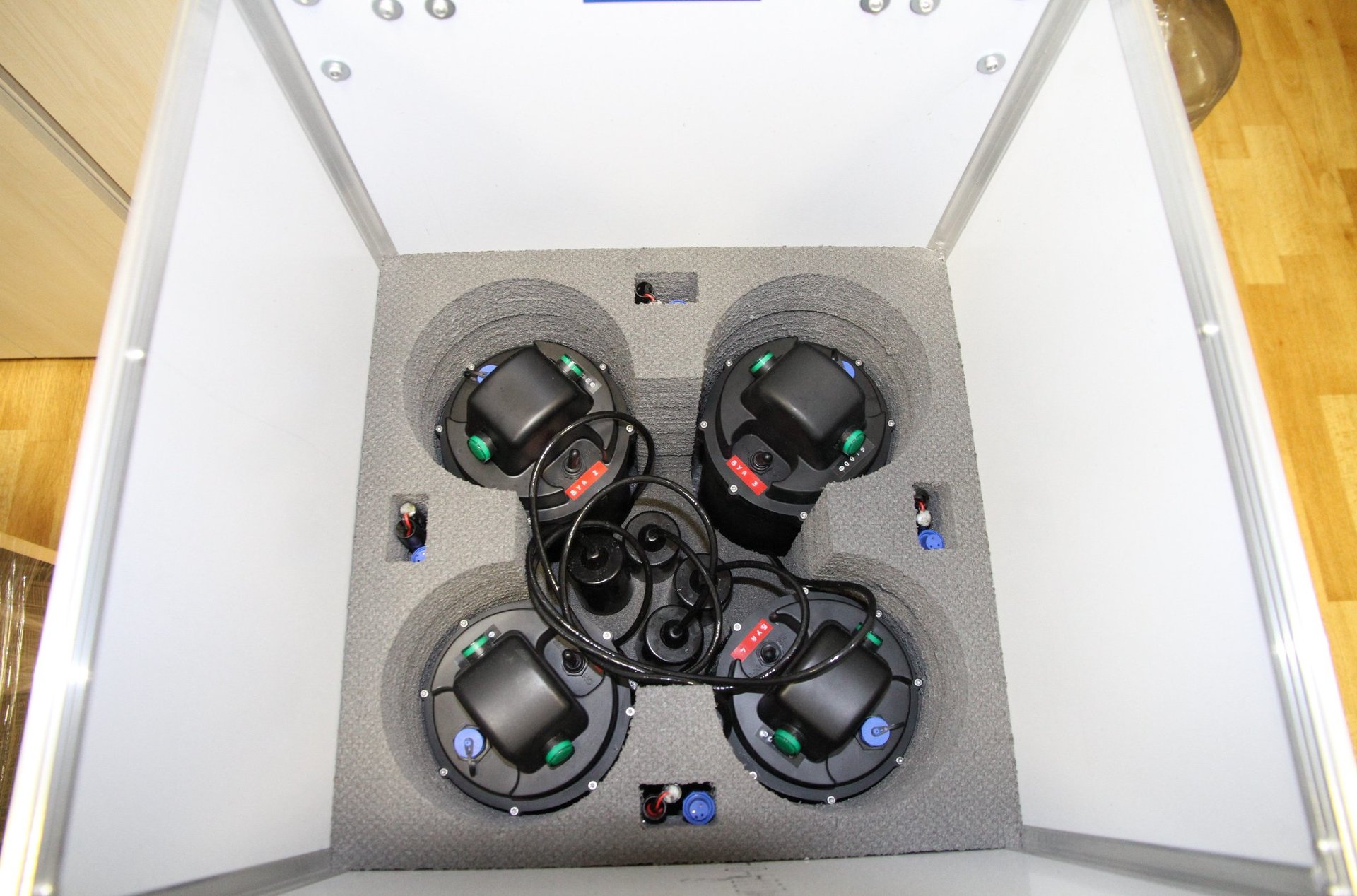
Вот результаты одних из первых серьёзных испытаний на Белом море в 2015 году. Буи и приемник «в статике», настоящее Белое море, непростые условия — мелководье и сильная многолучевость:
Ещё один скриншот с нашего технологического ПО. То же самое Белое море. Идём на вёслах, опустив приемник на кабеле.

А вот апрель 2016 года, Волгоградское водохранилище. Трек выгружен с водолазного приемника, тогда ещё первой версии. Средний дребезг (ширина трека) — порядка 1.5-2 метров:

С самого начала у нас открытый протокол сопряжения и выгрузка трека в KML, GPX и CSV. Водолазные устройства имеют беспроводную зарядку и сопрягаются с ПК по Bluetooth. После выгрузки трек можно импортировать в GoogleEarth или SAS.Planet. Впоследствии мы сделали эмуляцию GNSS-приемника, так, что теперь навигационный приёмник робота (он называется у нас RedNODE) подключать непосредственно к ПК cSAS.Planet и использовать все его удобства- оффлайн карты, возможность выбора любой подложки, рисование трека в реальном времени и т.п.
А вот водолаз, который помогал нам в апреле 2016 на Волгоградском водохранилище:

Обратите внимание, у него на руке закреплён навигатор (жёлтый), а на баллоне висит второй (чёрный). Трек с водохранилища, показанный выше, был выгружен с чёрного навигатора, того, что был установлен на баллоне. Трек с наручного навигатора получился очень плохой, с большим количеством пропусков. Именно после этого погружения мы окончательно решили выносить акустический приёмник так, чтобы он не экранировался дайвером.
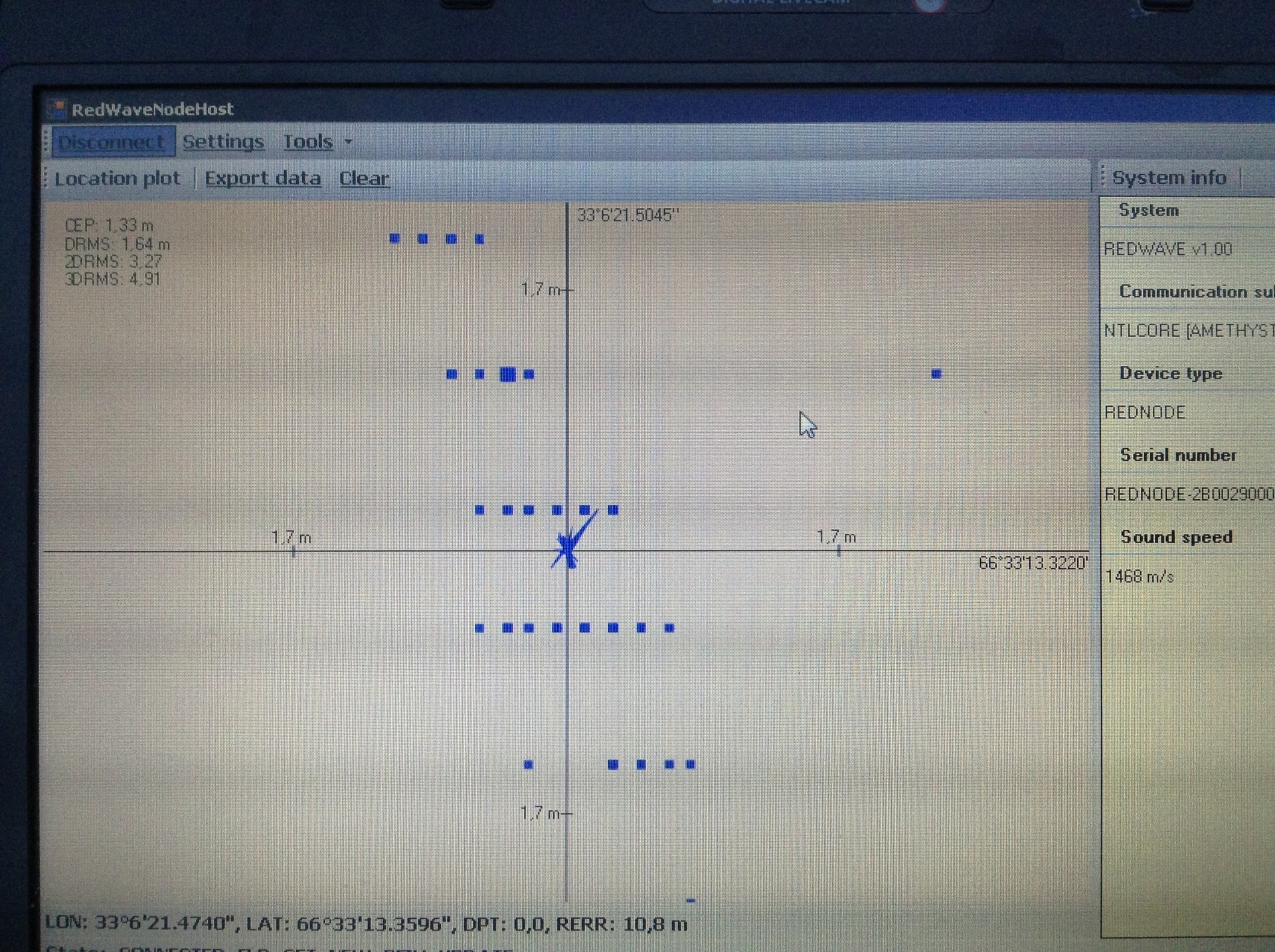
Октябрь 2016, устье реки Пичуга, Волгоградское водохранилище. Одновременная запись трека с двух устройств RedNODE (навигатор робота)и RedNAV (навигатор водолаза).
Видим два трека, записанные с одной лодки при помощи двух устройств – RedNODE (навигатор робота)и RedNAV (навигатор водолаза; оба опускались на веревке с борта резиновой лодки). Тестировалась работа устройств вне навигационной базы (вне фигуры буев). Трек RedNODE (фиолетовый) писался прямо при помощи SAS.Planet, трек водолазного приемника был выгружен пост-фактум и наложен поверх. В точке «Waypoint 1» водолазный приемник был вытащен из воды, а RedNODEмы держали в воде до самого берега, о чем свидетельствует сам трек. И даже есть фото:

(Картина «Выгуливание карася». Масло, холст. р. Пичуга, октябрь 2016)
В тот момент мы были очень удивлены тому, что устройство работает у самого берега — это крайне тяжелые гидрологические условия, плюс ко всему — работа вне навигационной базы.
А вот и результаты, полученные на последней (на сегодняшний день) версии прошивки и «железа». Трек движения водолаза, ноябрь 2016, канал им. Москвы в районе ст. Метро «Водный стадион» (Москва):

Хочу обратить внимание на то, насколько облегчается работа водолаза. Перед водолазом была поставлена следующая задача: погрузиться, выйти на один из буев, от него выйти на другой буй и вернуться обратно – по навигатору.
Условия погружения — мутная вода, видимость не более 1 метра. Водолаз прошел точь-в-точь по своему следу — максимальное отклонение от собственной траектории составило не более 1.5 метров! Дистанция, между буями 2 и 4 порядка 210 метров. То есть человек не тратил время и силы на поиск — он просто шел туда, куда ему указывал прибор.
P.S. Кто и что делал:
— Один человек спроектировал и развел все платы и нарисовал всю механику, плюс продумал технологию сборки, сам всё спаял (для справки, в одном навигаторе – более девятисот точек пайки!) и собрал;
— Другой человек придумал модель и написал все прошивки (а ещё помогал собирать);
— Еще один человек руководил всем этим, попутно направляя заходящий в тупик research и колеся необъятную в поисках мест и людей для испытаний, а также гастролировал с демонстрационным комплектом и обивал пороги разных фондов.
P.P.S.
То, что мыслимо — осуществимо. (С) Мао
Комментарии (188)

spc
20.01.2017 10:57+1Кажется, в какой-то из отечественных картин была фраза, лучше всего характеризующая то, что случилось: «Ну вы, блин, даете!». В лучшем смысле.
А, если не секрет, в каком диапазоне глубин работает эта штука, и образно, какую зону обслуживает один буй (я понимаю, что нужно «созвездие»)?
AlekDikarev
20.01.2017 11:07+2Диапазон глубин сейчас ограничивается датчиками давления — маленькие бывают только до 30 бар (~300 м). Плюс есть такое понятие как «слой скачка» (вызванный изменением плотности воды) под который звук не проходит — но где-то этот слой есть, где-то нет, где-то он на 100 метрах, а где-то на 400.
Один буй ничего не решает — нужны все четыре. Энергетически приемник может слышать буй на дистанции до 3000 м — в «глубоком море». Но для работы нужно чтоб приемник слышал все четыре буя.Sly_tom_cat
20.01.2017 12:05> Но для работы нужно чтоб приемник слышал все четыре буя.
Мне сдается такой подход (только все 4 или кукиш) — заметное снижение надежности системы. И кстати 4 и только 4 — ограничение по зоне. Если реализовать что-то типа роуминга и работу на 3-5 буях — то получим надежную практически бесконечно масштабируемую систему (вопрос только сколько буев накидать). За одно это отчасти решит вопрос заслонения отдельных буев.BurlakovSG
20.01.2017 12:18Больше буев — меньше качество передачи. Не будут ли они мешать друг другу, если их будет больше, ведь в один момент времени можно слушать только один буй.

pvvv
20.01.2017 15:13а почему четыре?
разность времени распространения сигнала между двумя передатчиками даёт некую поверхность, где может находится приёмник.
пересечение двух таких поверхностей — кривая, трех — точка. плюс тут ещё и глубина точно известна по давлению.
три передатчика — три разности (1-2, 1-3, 2-3), вроде должно хватать?paluke
20.01.2017 18:20Наверное, потому же, почему и в настоящем gps нужно минимум 4 спутника. Пересечение трех сфер — действительно точка. Но эти сферы не неподвижны. Точка пересечения движется по некоей кривой. Так что нужен либо четвертый передатчик, либо очень точно синхронизированные часы.
pvvv
20.01.2017 18:54там не сферы, так как измеряется не расстояние до конкретного спутника, а разница расстояний до двух спутников, и пересечение трёх пожалуй даёт не одну, а две точки, правда учитывая скорости с которыми летают спутники — вторая точка будет двигаться очень «неестественно» для обычного gps приёмника.
и для подводного gps всегда есть четвёртая «сфера» — точнее плоскость — так как известна глубина.
ну и в отличии от спутников буи — неподвижные (если отмасштабировать скорости GPS спутников) и их координаты за время измерения не изменяются и известны.
kahi4
20.01.2017 19:05+2Нет. Немного из теории о ГНСС:
У нас есть псевдодальности, которые являются перемножением времени прохождения сигнала на скорость распространения волны в среде. Зная координаты трех маяков (спутников) и расстояние до них (псевдодальности) можно решить систему диф. уравнений, записанных в параметричкоском виде, из которых можно выяснить три неизвестных — свои x, y и z. (Уравнения буквально предствляют собой (х — х1)^2 + (y- y1) ^ 2 + (z — z1)^ 2 = r^2 = (c * (t — t1)) ^ 2; где t — время на потребительском устройстве (время приема сигнала), t1 — время излучения сигнала (время на спутнике).
Уход потребительских часов составляет… Возьмем супер очень точные — пусть будет 10 секунд в год, т.е. 10 секунд в 31536000, т.е. 1.0^(-7) в секунду — помноженное на скорость света это уже будет 30 метров. В реальных устройствах уход гораздо больше (несколько минут в год), что выражается в катастрофической ошибке.
Именно для того, чтобы избежать этой проблемы, и используется четвертый спутник, который добавляет четвертое уравнение в систему уравнений, а четвертой неизвестной выступает время на устройстве потребителя (t), т.е. время приема сигнала. 4 уравнения, 4 неизвестных — все великолепно решается.
Вот конкретно тут я не знаю для чего нужен четвертый буй, покуда уход часов, помноженный на скорость распространения звука в воде (1000 м в секунду, если не изменяет память) — копейки.

pash7ka
26.01.2017 20:02Синхронизировать часы на приёмнике можно и перед погружением по тому же самому GPS.
AlekDikarev
26.01.2017 20:03Можно, но смысл? Это дополнительная процедура. Если можно без нее — лучше без нее.
pash7ka
26.01.2017 20:39Из комментария kahi4 я понял, что основная проблема, из-за которой без 4-го буя не обойтись, в том что время на приёмнике — 4-я неизвестная.
Если бы можно было ценой предварительной синхронизации обойтись без лишнего буя, разве это не полезно?AlekDikarev
27.01.2017 00:11+1Я вам по опыту скажу, что любая доп операция — это очень плохо. Зимой на воде карабин обледеневший застегнуть/расстегнуть замерзшими пальцами уже проблема. А что-то там синхронизировать и тп. Плюс в нашем случае можно плавать пока автономность позволяет (24 часа для буев и 12 для навигаторов), а с синхронизацией часы быстро уйдут и надо все по новой
pacific182
20.01.2017 11:07+2На первый взгляд круто. Но есть вопросы.
Цены конкурентов указаны. А стоимость вашего комплекта аппаратуры не указана.
MicronNAV за 18 тысяч евро предоставляет комплект, который работает на 500 метров (это из вашей статьи, на сайт производителя не ходил). «на дистанциях всего лишь до 500 метров» — т.е. 500 метров это очень мало за 18 тысяч евро. А в вашей системе диагональ между буями 210 м и вы удивляетесь, что приемник работает за пределами квадрата. А 210 метров получается не мало?
Не очень понятно, как сравнивать с конкурентами.AlekDikarev
20.01.2017 11:14+1Я старался избегать вопросов про цены (чтобы статья не казалась рекламной) и указал лишь для одной системы чтобы читатели понимали порядок величин.
В том эксперименте мы поставили буи просто исходя из условий акватории — чтоб их не переехали судами. Их можно было бы и дальше друг от друга поставить.
Суть в том, что водолаз повторил свой путь на дистанции 210 метров с отклонением в 1-1.5 метра. Попробуйте представить себе: пройти 210 метров с закрытыми глазами и вернуться назад точно по своему следу. -Вот на это я хотел обратить внимание, наверное просто неясно выразился.
Наше основное преимущество — у нас неограниченное чисто одновременно позиционирующихся устройств может быть в акватории.pacific182
20.01.2017 11:39+1Может быть и старались, но перечислили конкурентов и привели какие-то аргументы почему они не торт. Цена и зона действия у MicroNAV. По стартупу Ariadna не очень понял в чем претензия по физике. Та же зона 500 метров, точность позиционирования 10 м. Хотя в один единственный передатчик, действительно, верится с трудом. Поэтому и хочется ответа с вашей стороны, если вы указали на конкурентов пальцем. Да и самореклама, все же, если не единственный мотив написания статьи, то один из. И в этом ничего плохого нет.
По энергетике 3 км это круто, но как и в эксперименте с 5G на 30 км в диапазоне 40 ГГц энергетика это только один из факторов, и не самый критичный. Многолучевость может ограничить все гораздо меньшей зоной. Это все к вопросам условий распространения.
Ну и про закрытые глаза — это тоже лирика. Я не спец по гидроаккустике, и поправьте меня, если я не прав. На базе 210 м для точности в 1 м по горизонтали СКО разности времени хода нужно около 1мс. И сигнал с полосой около килогерца. Цифры кажутся реальными. Или я не прав?
Дальше по числу позиционирующихся устройств. Пассивный прием предполагает, что по другому и не получится. Гораздо интереснее как обстоят дела с масштабируемостью системы буев. Каково максимальное число буев в одной акватории? Все же упирается в разделение каналов. Я так понимаю, оно у вас кодовое?
SGordon123
20.01.2017 12:40А от чего зависит скорость звука в воде? Плотность/соленость температура? А что видит на дисплейчике водолаз?
vgoloviznin
21.01.2017 00:52Именно скорость звука в основном от температуры (чем выше температура, тем выше скорость). Соленость, уровень слоя скачка, рельеф дна влияют на прием сигнала
AlekDikarev
20.01.2017 14:33+2А конкурентов особо и нет — есть много качественных и феерично дорогих систем для аппаратов. Для водолазов и маленьких роботов практически ничего. Ариадна — это инерциалка, и пока от них нет никаких реальных результатов.
И да, многолучевость, растворенный газ, рельеф, слой скачка — это все ограничивает и ухудшает. Про закрытые глаза — это не лирика, это реальный эксперимент. Сигнал у нас полосой несколько больше 1 кГц), точнее порядка 25.
По поводу масштабируемости: для данной системы в одной акватории может быть только 4 буя — ни больше не меньше. Есть проект на бесконечное число буев — но это другая энергетика, другие деньги и самое печальное — это никому не нужно на данный момент.
Сейчас у нас буи разделены и кодово и по времени.pacific182
20.01.2017 14:42Спасибо за ответ.
В вашей системе очень нравится мобильность. Ну и то, что она работает и есть результат. И весьма неплохой.
Да, ещё не понтяно с буями — они выбрасываются за борт в нужных точках, а дальше что? Они же как-то должны на одном месте удерживаться? Просто на иллюстрациях не увидел якорей.
И почему на трех буях не работает, если глубина измеряется по датчику давления?AlekDikarev
20.01.2017 16:39+1Буи ставятся на якоря, теоретически можно и просто бросить в воду — но так их может унести и есть немалый шанс их просто потерять.
На трех буях теоретически можно, но надежнее на четырех, поэтому мы сделали на четырех.mickvav
20.01.2017 23:59А послушать воду и прийти по gps-у на лодке к уплывшему бую — не вариант?

StDmitirev
21.01.2017 01:58+3Только в виде разового квеста. Скорее всего, пропажу буя вы заметите уже по факту исчезновения сигнала и придётся сначала обнаружить зону в которой сигнал буя ещё можно принять, а потом пойти в нужную точку. А за время поиска буй может уплыть, например, из спокойного залива в открытое море, где большие волны, а вы, как на зло, на маленькой лодке.
Вот, товарищи что-то потеряли в море и не могут найти:https://twitter.com/MarineSys_est/status/822378600041041922
AleXP3
21.01.2017 10:12+1Есть проект на бесконечное число буев — но это другая энергетика, другие деньги и самое печальное — это никому не нужно на данный момент.
Египтянам предложите. Если у них на каждый дейли-дайв бот повесят по бую, а приёмники можно будет взять в прокат, это может заинтересовать очень многие дайв-центры.
Creathor
21.01.2017 17:05+1с этими парнями тоже общаемся, но им нужна немного другая задача: руководитель спусков на лодке видит, где расположены господа отдыхающие. В нашей LBL, ввиду того, что координата определяется внизу, это делать не очень удобно.
А вот в USBL — это будет реализовано, уже делаем.AleXP3
21.01.2017 18:21Тут другая бизнес-схема должна быть по внедрению (продажам):
1. Дайв-центры заинтересованы продавать услуги, в т.ч. и сдавать в аренду разного рода снаряжение. Из высоко-технологичных вещей они предлагают в т.ч. и декомпрессиметры для страждущих.
2. Для того чтобы получить возможность предлагать клиентам ваши устройства дайвцентры устанавливают на своих ботах надводные маяки, а дайверы уже будут по желанию брать в аренду приёмники.
Схема с арендой девайсов она выгоднее для дайв-центров, а значит и для вас. Это не разовая продажа, а сотрудничество надолго. Будут ломать устройства, терять их, докупать дополнительные буи для новых ботов и т.п. И всё это проистекает из желания клиентов, которое постоянно даёт финансовую подпитку. А схема с USBL это, как мне видится, разовая продажа устройств не клиентам, а дайв-центру который уже вряд-ли сможет продавать пользовательские услуги по позиционированию. Нафига это дайверу-то самому надо чтобы его сверху пасли? Бесплатно может и нацепит себе дополнительный блок с передатчиком, но и то не факт так как все люди устроены так, что всё навязываемое не приветствуют.Creathor
21.01.2017 23:51+1я писал не о бизнес-модели, а о требуемой функциональности для дайв-центров.
Зачем человеку декомпрессиметр — вроде очевидно.
Зачем человеку en mass географические координаты под водой — не очень очевидно. Дайв-центры этого тоже не понимают.
Зачем руководителю спусков наверху следить за расположением туристов под водой — очевидно. Дайв-центры этого и хотят, потому что безопасность и все прочие дела.
Отсюда и слова про USBL. Что же касается бизнесовой части — там все варианты возможны, и аренда, и покупка.AleXP3
22.01.2017 00:51+1Зачем человеку декомпрессиметр — вроде очевидно
Это теперь очевидно, а когда все и всюду ныряли по таблицам лишний прибор называли «дополнительной точкой отказа» и всегда дублировали аналоговым манометром, часами и таблицей же. Многие и сегодня так делают.
Зачем человеку en mass географические координаты под водой — не очень очевидно. Дайв-центры этого тоже не понимают.
С вашим устройством речь идёт не о внедрении на существующий рынок, с чем-либо более совершенным нежели чем то, что на нём уже давно представлено, а о создании небольшого нового сегмента рынка дайв-услуг. Поэтому надо не на спрос д/ц ориентироваться, а на собственную стратегию сбытовых усилий по продвижению своей продукции. В общем вам нужно создавать яркие примеры использования в современной дайв-индустрии своего «навигатора». Я бы посоветовал вам проконсультироваться у человека который в египетской дайв-индустрии не одного верблюда уже без соли съел: у Эйдиса Бориса Анатольевича. Он и дайв-рынок услуг знает как никто, и боты у них вроде как собственные, и с египетскими всякими надзорными и регулирующими структурами он дружит. Было бы замечательно если бы он, и его д/ц, начали практическое внедрение на Красном ваших технологий.
Навигатор — вещь новая и дайв-центры сами ещё не очень понимают зачем им всё это и нужно-ли вообще. Ну вот для чего им знания где находятся в данный момент пловцы? Что с этими знаниями делать — сверху на зодиаке сопровождать для подстраховки? Но это и так делается, когда нужно. Только дёшево: следуешь за пузырями и все дела. И, по большому счёту, в жизни д/ц ничего не изменится если они будут следить за показаниями прибора вместо пузырей. Всё равно в случае траблов у дайвера они ничем помочь реально не смогут — банально не успеют. А вот создать «рынок подводной навигации»(тм), для рядовых дайверов, это было бы интересно именно «en masse». Создать, запатентовать собственные проприетарные используемые протоколы обмена, определить вменяемые роялти для сторонних производителей похожих устройств и т.д. В общем «создать и возглавить». При этом и защитить созданный рынок юридически и финансово путём работы на опережение и развешивания своих буйков на все боты подряд в мировых центрах дайвинга. Если успеете первыми, то потом остальным уже сложно будет не следовать вашим стандартам.
dimas
23.01.2017 20:24Только как показывает опыт потерянных на Эльфинстоуне, или пловцов от Бразеров до берега, по пузырям далеко не всегда получается нормально отследить, как и заметить всплывших…
Можно, конечно, приписать это все их раздолбайству, но иногда такое случается.
Другой вопрос, что часть этих проблем решается поверхностными маячками, но они обычно с более глобальной пеленгацией и дорогие.
А вот навигация именно в любительском дайвинге чаще нужна в тех местах, где описанная система работать не будет, т.е. в пещерах или железе…AleXP3
23.01.2017 23:48Пара частных примеров никак не может нивелировать статистику — это же очевидно. На ваши два примера есть МИЛЛИОНЫ! контр примеров когда дайв вполне успешно и безаварийно сопровождается именно по пузырям и всё ок.
Можно, конечно, приписать это все их раздолбайству, но иногда такое случается.
Все «когда-то случается». И если будет использоваться обсуждаемая система, то и она непременно когда-то сбойнет. Просто в силу закона больших чисел.
Но, замечу: лидером причин происшествий и катастроф, в дайвинге, всегда является именно раздолбайство. Так что какие бы техники и технологии не использовались, но происшествия все равно и далее будут продолжаться.
А вот навигация именно в любительском дайвинге чаще нужна в тех местах, где описанная система работать не будет, т.е. в пещерах или железе…
С трудом представляю себе вменяемого speleo или wreck дайвера доверившего свою жизнь устройству на батарейке. Это совсем другой уровень спусков — там подобные устройства вообще не более чем вредны.dimas
24.01.2017 00:08Смешно.
Именно что в миллионах (и незачем так орать) случаев это устройство дайверу вообще не нужно :)
Гурите потише. Если исходить именно с точки зрения среднестатистического дайвера, то такое устройство тоже будет более вредно, чем полезно, т.к. еще одна игрушка, что будет отвлекать :)AleXP3
26.01.2017 20:22Если исходить именно с точки зрения среднестатистического дайвера, то такое устройство тоже будет более вредно, чем полезно, т.к. еще одна игрушка, что будет отвлекать :)
Рекреационный дайвинг это изначально игрушка, а не серьёзное занятие. Как любое развлечение ему свойственно обрастать гаджетами, курсами, мастер-классами и всей прочей атрибутикой «веселого отдыха не для дешевых людей!» ;)
Декомпрессиметры позволилизатащить под водупривлечь в индустрию в качестве клиентов больше людейс частичным поражением мозгапреклонного возраста. А массовое внедрение индивидуальных устройств навигации вполне может развиться в целое направление «самостоятельных погружений» — без гида. И будут дайвботы брать на борт вдвое больше пассажиров на дейли. Одна половина с гидом, который по маршруту водит, а другая вполне может и без него обойтись, ныряя с взятыми в прокат, или собственными, новомодными девайсами в которых есть карта и навигация. Доходы дайвцентров и капитанов ботов возрастут.
Все довольны.
Заголовок спойлераКроме тех у кого внезапно сели батарейки! Но это уже такое…dimas
26.01.2017 21:22Ну, рекреационный дайвинг он тоже разный бывает… Одно дело у берегов Хургады полоскаться, а другое — то же сафари или длинная поездка.
А у некоторых ассоциация и Advanced Nitrox со спаркой и декомпрессией на пятидесятом найтроксе — это еще рекреация…
Дайв-компы — это все-таки еще и дополнительная безопасность, особенно с учетом раздолбайства и нырялки не «по ковшику»…
Не, не верю я в такое направление. Во-первых далеко не так много туристически-активных мест, где законодательно разрешено погружаться без гида, а часто именно без местного сертифицированного гида, который заодно и присмотрит чтобы лишнего не наломали. Во-вторых, надо это будет еще и «продать» дайверам, чтобы впихнуть в аренду устройство, т.к. вряд ли многие будут это покупать. Потом, это лишняя головная боль ДЦ, думать кого так можно пустить без присмотра, чтобы очередного ЧП не случилось… Разве что получится пропихнуть это в правила погружения от местных властей…AleXP3
26.01.2017 21:56Я не про сложность разных видов дайвинга, а про цели говорил. А цель, что у дейликов в Хургаде, что у тех кто на Северный Полюс занырнуть едет — одна: развлечься. 99% дайверов деньги тратят на поездки, а не зарабатывают этим.
За остальное, Вами означенное, я конечно не поручусь. Это надо жить и работать там, как Эйдис. И с властями общаться, и с ботоводами, и с инвесторами, и не один год. Но может Вы и правы и в дайвинге это «не взлетит». Но лучше попробовать и убедиться в этом, чем сразу отвергнуть.
Во-вторых, надо это будет еще и «продать» дайверам, чтобы впихнуть в аренду устройство, т.к. вряд ли многие будут это покупать.
Повторюсь: подводный геокешинг. Собственно его тоже изобрели производители навигационных девайсов.
История геокэшинга началась в 2000 году. 2 мая, на следующий день после официальной отмены загрубления сигнала GPS для гражданских приёмников[2], Дэйв Алмер (Dave Ulmer) из Портленда (штат Орегон) в одной из сетевых конференций предложил друзьям новую игру Stash («Пряталки»). Суть новой игры была в том, что один человек создавал тайник, публиковал его координаты в интернете, а другие по этим координатам пробовали найти тайник. На следующий день Дэйв отправился в лес и неподалёку от своего города спрятал первый тайник.
В спутниковых GPS-навигаторах фирмы Garmin есть функциональность по работе с геокэшерскими тайниками, в том числе с использованием ANT+ передатчика Garmin Chirp.[19][20] Также в форматах данных Garmin заложены два типа точек для простых тайников: невзятый тайник и взятый тайник. В последних моделях навигаторов реализованы и многие дополнительные функции, помогающие геокэшеру
А вообще, быть может, надо просто эту разработку взять и тупо продать в Garmin например.dimas
26.01.2017 22:08Ну развлечение в дайвинге — это либо что-то посмотреть интересно, либо залезть куда-то и потом этим хвастаться.
Геокешинг, кмк, был популярен достаточно короткое время, по крайней мере я уже несколько лет не помню чтобы кто-то из знакомых, кто в это играл, что-то об этом писал…
Попробовать, безусловно, можно… Особенно если нет ограничения в деньгах, знакомствах и прочих ресурсах :) Если же есть — кмк профессиональная сфера будет куда прибыльнее, хоть и не такая массовая.AleXP3
26.01.2017 22:33Если же есть — кмк профессиональная сфера будет куда прибыльнее, хоть и не такая массовая.
Производить одноразовые стаканчики куда как выгоднее чем запускать в космос спутники. Не стоит к «массовости» относиться с пренебрежением.
Геокешинг, кмк, был популярен достаточно короткое время, по крайней мере я уже несколько лет не помню чтобы кто-то из знакомых, кто в это играл, что-то об этом писал…
Это с любым хобби так. Мода. То вдруг взлеты, то падения массовости. Но на ноль мало что сходит. И ФИДО еще как-то живо, и олдфаги-радиолюбители ночами в эфиребухают как чертиведут интересные беседы и исследуют эфир. Ничего страшного в этом нет.
AlekDikarev
27.01.2017 00:14Никто ничего делать не хочет — всем бы все продать. Не примите на свой счёт — я об общей тенденции
AleXP3
27.01.2017 00:28На мой счет вполне можно отнести — я знаю, что постиндустриальная экономика она работает «от продаж», а не от производства или разработки. Умеешь продавать — на коне. Нет? Ничего не будет. Как, двадцать пять тому назад, сказал один мой знакомый «новый русский», он же старый еврей: «Сделать — любой… может. А ты продай!»(с) Увы — он прав. Нынче так мир устроен. Мне это тоже не нравится, но современная реальность, с сожалению, такова.
eugene08
24.01.2017 23:56не дай бог увидеть где то дайв который сопровождают по пузырям )
редко что случается благодаря тому что с группой уходит 1-2 и больше дайвмастеров, которые обеспечивают в т.ч. навигацию и безопасность
pash7ka
26.01.2017 20:33Зачем человеку подводные координаты?
Ну как же — поделиться с другом, который в следующем месяце поедет отдыхать, какой замечательный коралл ему совершенно необходимо посмотреть.
А дайв-центр ещё и карту окрестных достопримечательностей сделает, и будет рекомендовать клиентам определённый маршрут.StDmitirev
28.01.2017 01:45Задача поиска кораллов (и не только) встречалась у биологов и для них это очень актуально.
Creathor
28.01.2017 19:38+1Стас, справедливости ради, это не совсем обывательский дайвинг.
Мало кто прячет на дне моря безголовую тушу тюленя, пробитую двумя ломами для тяжести, в надежде, что там разведутся редкие виды рачков :)StDmitirev
29.01.2017 00:01+1Биолог уже сам по себе уже не обычный обыватель. Особенно биолог с аквалангом.
З.Ы. В процессе разведения редких червей ни один тюлень не пострадал. Тело тюленя было использовано в научных целях, конечно же, с согласия родственников умершего))))Creathor
29.01.2017 00:14ветка начиналась с обсуждения необходимости снабжения навигацией всех подряд дайверов, Стас.
А тюлень сам виноват, что не смог договориться с медведем )))
eugene08
20.01.2017 16:39+1На практике это не так трудно как вам кажется – вы отмечаете на компасе нужный азимут и двигаетесь необходимое расстояние (считая удары ласт, по линю, по давлению в баллоне и тп), в конечной точке отмечаете обратный азимут и двигаетесь в обратном направлении. Это азы подводной навигации обеспечивающие приемлемую точность в таком простом случае, и сравнение с «пройти 210 метров с закрытыми глазами» некорректно — даже в мутной воде у вас будет 0.5м чтобы рассмотреть компас. Гораздо сложнее и интересней пройти маршрут по нескольким точкам/на разных глубинах.
AlekDikarev
21.01.2017 13:19Там как раз водолаз прошёл маршрут — сначала к одному бую, потом к другому, потом назад до первого и вернулся на лодку. Все в погружённом состоянии. Отрабатывали задачу «привода водолаза».
v7r
22.01.2017 01:04Я бы в сравнении рассматривал не Tritech, а бюджетные УКБ-системы от LinkQuest и Applied Acoustics. А еще есть ACSA GIB.
Кроме того, из другого принципа позиционирования следует и отличие в модели использования: в нормальной (неинвертированной) УКБ-системе координаты определяются на стороне антенны (на судне-носителе), что неудобно для дайверов, но предпочтительнее для, например, телеуправляемых аппаратов. В представленной системе координаты определяет потребитель, и система «не знает» о координатах подводных объектов (как, например, спутник системы ГНСС не знает о положении вашего телефона). Конечно, можно передавать их назад на буи, но тогда исчезает преимущество пассивности приёмника.
В целом видно, что устройство нишевое, для дайверов, и, по-моему, не претендует на замену УКБ-систем. Тем не менее, думаю, найдет своего покупателя. Искренне желаю успехов!AlekDikarev
22.01.2017 01:07А Tritech если не ошибаюсь дешевле TrackLink. УКБ у нас разрабатывается, у нас появился специальный человек для этих целей.
Для дайверов — выход на произвольную точку никакая УКБ не заменит наш вариант.
Creathor
22.01.2017 11:24+1как говорят юзеры линкквеста — «система работает. По праздникам и выходным!!!»
УКБ — систему делаем сейчас, координата в ней будет И внизу, И наверху.
Искренне желаю успехов!
Спасибо!
StDmitirev
22.01.2017 21:21Не только для дайверов. На роботов тоже хорошо ставится.
Просто у LBL и USBL есть свои особенности при использовании, как Вы уже заметили выше.
BurlakovSG
20.01.2017 11:37Странно почему раньше никому не приходила в голову такая идея. :)
Creathor
21.01.2017 00:52+3она много кому пришла в голову, вот только сделать надёжно работающую, при этом недорогую (относительно!) и компактную систему пока что никому не удавалось. По крайней мере, нам такие примеры неизвестны.
Если что, я тот третий паренёк, который "руководил всем этим, попутно направляя заходящий в тупик research".
KonstantinSpb
20.01.2017 11:38Синхроничность, я как раз сейчас читаю книгу Cooperative OFDM Underwater Acoustic Communications :)

serafims
20.01.2017 11:39А почему нельзя расположить на водолазе пару акустических приемников, чтобы всегда как минимум один смотрел бы на буй? Что могло бы повысить точность/скорость определения координат…
Sly_tom_cat
20.01.2017 12:00+1Я думаю тут цена вопроса вырастает, а преимуществ против приемника на баллоне — не получается.

WondeRu
20.01.2017 11:40+1Ребята, а можете показать элементы на дисплее? Есть ли в планах отображать полноценную карту?
PS. Молодцы )AlekDikarev
20.01.2017 17:02+2Сходу под рукой фото нормального не нашлось, есть такое:

Четыре квадратика — буи, тот, что крупнее — выбран и для него показаны азимут и дистанция. Если квадратик «не заполнен» — это означает что уровень заряда буя «в желтой зоне».
Можно листать дальше, пролистав все буи пользователь попадает на путевые точки (загруженные и/или сохраненные им самим) для которых тоже отображается азимут и дистанция.
Еще отображается температура и глубина, а так же заряд батареи.
Отображать карту можно, но где взять сами карты?) Под водой нет улиц и городов)
Позже добавлю в статью описание интерфейса.
ser-mk
21.01.2017 00:52+1для мирового океана есть карта глубин,
для закрытых водоемов не масштаба Байкала, где нет глубин, то хотя бы форма берегов, отмеченные на карте буи и какие-нибудь еще POI
Creathor
21.01.2017 01:06С полноценной картой всё проще.
В стране уже есть «подводные планшеты» с картами. И сделаны они весьма неплохо.
Нам нет никакого резона пытаться изобрести свой планшет, достаточно того, что мы сделали одну из лучших навигаций в мире (в своём классе, разумеется), и возможность интегрировать её в любое устройство, которое способно понять, что такое RS232 и NMEA.

Arxitektor
20.01.2017 11:45Отлично просто отлично.
Как я понимаю заказчики уже есть?
МЧС должны заинтересоваться.
Ведь обследовать обломки крушений под водой очень трудо потом к ним вернуться.
Очень надеюсь что вам удастся выйти на глобальный рынок.
У других системы работают по похожему принципу?
Можно ли засеять нужную акваторию боями штук 10-50?
Например картография древних затопленных городов?AlekDikarev
20.01.2017 14:37Четырех буев в средней (по гидрологии) акватории достаточно для работы в квадрате 1500х1500 метров.
Другие системы — там все очень по-разному. MicronNAV — Это чистый USBL (пеленг-дистанция), UDI — это в основном обмен предустановленными сообщениями и зачаточная навигация по FDOA (поплавать по кругу и по изменению доплера понять где примерно источник).
Заказчики есть.
fotofan
20.01.2017 16:44Если не секрет — зарубежные или наши? Военные интересовались?
Creathor
21.01.2017 01:08и те, и те. Люди в погонах уже купили себе несколько комплектов.
Перед этим сравнили наш прибор с израильским и английским.
И сказали, что по характеристикам и возможностям мы уработали и англичан, и израильтян.
avia07
20.01.2017 12:16Еще интересно было бы реализовать в приемнике память на несколько точек, чтобы водолаз мог отмечать координаты объектов, к которым в последствии нужно вернуться.
BurlakovSG
20.01.2017 12:18Это уже не так сложно реализовать.
StDmitirev
20.01.2017 14:39Это уже реализовано. Можно сохранять координаты в интересующей точке, можно выгружать их на ПК, можно передавать эти точки в другие водолазные навигаторы.
AlekDikarev
20.01.2017 14:39Это уже реализовано. Можно перед погружением загрузить произвольные точки, можно отметить интересное место под водой, потом выгрузить, посмотреть на карте, потом загрузить в другие девайсы если надо.

Demonos
20.01.2017 12:31-3Работа без сомнения заслуживает уважения.
Есть пара вопросов.
А как реагирует живность на УЗ фон? Как понимаю, в ультразвуковом диапазоне буй орёт просто оглушающе. Часто наблюдал, как детишки в утробе пытаются отпихнуться от датчика на животе мамы, им ультразвук как минимум неприятен.
И ещё. Когда таких буёв много, не создаст ли это такое же звуковое захламление, как сейчас наблююдается в радиоэфире? Сохранят ли те же китовые свои способности к охоте?AlekDikarev
20.01.2017 14:42+2Уверяю вас, наши буи по сравнению с простыми лодочными моторами — это шелест листвы, не говоря уже об акустике подводных лодок и пр.

KbRadar
21.01.2017 11:04+1Расскажите немного про то на какой частоте под водой осуществляется передача, сколько времени длится период работы системы (передача каждого буя), как боретесь с многолучёвостью и за какое время приёмник определяет координаты. Спасибо!
Creathor
21.01.2017 17:08Приёмник начинает определять координаты примерно за 40 секунд после начала приёма сигнала от всех буёв.
Далее координата определяется раз в секунду.
Остальное, простите, рассказывать мы не будем :)AleXP3
21.01.2017 18:27-140 секунд прогревается? Тогда очевидно, что прибор сделан на лампах. Все секреты и рассказали сразу )

m1n7
20.01.2017 14:46+3Заголовок спойлера
jonywtf
20.01.2017 13:08+2Интересная тема! Молодцы!)
Учился по специальности «цифровая обработка сигнала».
Для диплома была идея сделать подобную систему в примитивном виде… передавать положение буев на поверхности посредством акустики, а приемником слушать и вычислять свое положение.
Даже начинал кодить себе простенький имитатор.Интересная была задача!
Пытался синхронизировать буи между собой чтобы друг-другу не мешали и передавали свои координаты с определенной задержкой, также пытался учитывать давление, температуру и соленость воды…
Но потом занялся стеганографией и в дипломе прятал данные в звуковой сигнал, прогонял через колонки-диктофон и потом восстанавливал оригинальные данные из записи)

Uris
20.01.2017 13:42Результаты запатентованы?
AlekDikarev
20.01.2017 14:43Да, есть два патента — один на полезную модель, он касается компоновочной схемы прибора (когда и процессор и вся электроника внутри пьезокольца и все залито в компаунд), а другой на метод позиционирования подводных объектов и систему его реализующую.
KbRadar
21.01.2017 11:05Кстати о пьезокольцах. Они какие-то стандартные использовались или делались на заказ под систему?
KonstantinSpb
20.01.2017 13:56А пьезоизлучатель где-то покупали или сами делали?
AlekDikarev
20.01.2017 14:44Сама керамика покупная конечно. Нельзя делать абсолютно все). Конструкция антенн — наша, потому как пьезоэлемент — это еще не антенна.

norlin
20.01.2017 14:01А рассматривалась ли проблема звукового загрязнения среды?
AlekDikarev
20.01.2017 14:46Да. Уверяю вас, мы влияем на окружающую среду не больше чем самый хилый китайски эхолот рыбака.
KonstantinSpb
20.01.2017 15:01Да, подводники наверное обрадуются. Насколько я знаю, пока не существует лицензирования частотного пространства под водой. Т.е. пока что каждый суслик агроном, используй какие хочешь частоты и мощности сигнала.
StDmitirev
21.01.2017 11:25+1Лицензировать частотное пространство под водой не так просто. Уж очень там полоса частот узкая.
AleXP3
21.01.2017 11:35+1Зачем тут частотное? Кодового наверное достаточно. Под водой скорости на порядки меньше чем на поверхности. Вещать можно очень эпизодически — на точность позиционирования повлияет мало.
StDmitirev
21.01.2017 12:11+2Кодовое разделение возможно, если все пользуются каким-то одним способом передачи данных (вообще все!), да ещё и поддерживающим кодовое разделение. Вещать эпизодически можно, но не всегда. Если у вас на дне стоят, например, датчики измеряющие скорость течения, то передавать они могут раз в час и друг другу мешать не будут. Если у вас работает навигационная система (USBL), ведущая активный обмен с несколькими абонентами (пнапример, посылает запрос раз в 2 секунды и ждёт ответ), то вклиниться в промежуток между запросом и ответом практически невозможно.
AleXP3
21.01.2017 13:33Давайте обсуждать не всё подряд, а только данное техническое устройство заданный Вами выше контекст про лицензирование передатчиков и разделение их частот, дабы они не мешали друг другу. Мне вот кажется, что этому должно служить именно кодовое разделение, а не частотное. На дворе не времена Попова, ЧМ модуляции и т.п.
Впрочем: частотного разделения конечно тоже избежать не удастся. Но это уже как раз между классами устройств: подводными навигаторами для дайверов, для военных целей, для производственной и поисково-спасательной деятельности, для донных стационарных датчиков и проч. и т.п. В общем получается классическое «частотно-кодовое» разделение.
И ещё ограничения по мощности понадобятся дабы на одном рифе не ловить сигналы с соседнего.
ЗЫ. Я правильно понимаю, что Вы — «третий», в команде разработчиков? Вы все — большие молодцы! Респект и всё такое!AlekDikarev
21.01.2017 20:23+1С нормальным широкополосным сигналом частотного разделения не получится в виду очень узкой доступной полосы — там некуда разносить банально. Забудьте про частотное разделение

Wan-Derer
26.01.2017 00:11А как насчёт временнОго разделения? Т.е. первый буй вещает «Я первый» с определённым периодом. Период делится на тайм-слоты. Соответственно, буи, имеющие номер N, вещают «Я N-ный» в своём слоте.
Тут, конечно, усложняется буй — он должен иметь не только передатчик, но и приёмник. Зато кол-во буёв можно увеличить очень просто. В т.ч. накидать резервных в тех случаях когда это необходимо.StDmitirev
26.01.2017 22:19Временное разделение, при довольно низкой скорости распространения сигнала, штука коварная)) Может оказаться, что в какой-то точке встречаются сигналы от двух буёв (или даже от N).
Скорее даже не усложняется… Если буи должны будут, помимо излучения навигационного сигнала, ещё и осуществлять приём, то надёжность всей системы резко упадёт.
bigbrotherwatchingyou
20.01.2017 14:46Так то всё конечно хорошо, но опять же всё привязано к бую, и выше к GPS/Глонасс (((
AlekDikarev
20.01.2017 14:48Где-то приходится идти на компромисс. Но, вас же не смущает что у вас в телефоне GPS/GLONASS? Или в машине навигатор привязан к спутникам. Под водой и так все гораздо сложнее чем на земле.
bigbrotherwatchingyou
23.01.2017 09:00я про то, что при использовании GPS/Глонасс нет посредников между излучателем и приемником, а в данном конкретном случае буй — уже посредник. оно понятно, что в воде всё сложнее, остается надеяться, что могут найтись и другие способы передачи сигнала на глубину
StDmitirev
23.01.2017 23:04+1Не совсем так. Буи не являются посредниками т.к. сами по себе образуют локальную систему позиционирования (с потенциальной возможностью расширения до глобальной). GPS/ГЛОНАСС/BeiDou/Galileo/Doris используются для многократного повышения удобства использования системы. Чтобы пользователю не пришлось бегать по берегу с теодолитом или, боже упаси, вспоминать как пользоваться секстантом.
Другие способы передачи данных под воду есть: сверхдлинные волны (и антенны там такие же).

Strannii
20.01.2017 14:46Это очень здорово, отличную работу вы проделали! Даже не верится, что до этого никто не сделал систему такого типа

technomancer
20.01.2017 14:48+1Правильно ли я понял, что Ваши буи можно без предварительной настройки включать и сбрасывать в воду чуть ли не одновременно с водолазами?
И что будет, если один буй будет потерян по тем или иным причинам? Вы написали, что нужно именно четыре. И в упаковке у Вас — тоже четыре, без запасного.
Буи взаимозаменяемы?
Если да, то можно ли сразу засеять район работ 2-3 комплектами?
Или они будут друг другу мешать?
Вообще можно где-нибудь подробно почитать что-нибудь вроде инструкции или паспорта на комплекс? Спасибо.AlekDikarev
20.01.2017 14:52+1Да, все верно поняли. На воде они подхватывают сигнал со спутников за 1-2 минуты обычно. Если буй потерян — то ничего работать не будет. Буи не взаимозаменяемы в полном смысле — они идентичны механически и электрически, но работают в разных кодовых каналах.
Засеять район сразу несколькими комплектами нельзя — они будут мешать друг другу.
Инструкция есть, но она у нас не в свободном доступе, я думаю в ближайшее время все выложим в свободный доступ.technomancer
20.01.2017 15:13Будет очень любопытно почитать. Особенно при хорошей цене.
Вы не рассматриваете вариант комплектации с 1-2 запасными буями, которыми можно будет в разумное время заменить вышедший из строя? Рано или поздно такие заявки от пользователей все равно пойдут.Creathor
21.01.2017 01:09цена отличная — ближайший аналог, проигрывающий по характеристикам, стоит в два раза дороже, примерно.
AleXP3
21.01.2017 10:19+1Ну примерно хоть сколько ваш комплекс стоит для обычного дайвера?
Creathor
21.01.2017 17:12вроде тут реклама не приветствуется.
Отвечу так. Для развлечения систему смогут себе позволить только очень состоятельные парни.
А для работы — у нас не было ни одного случая, чтобы компания, покупая комплект или несколько для работы, сказала бы «дорого». Ни одного.
rPman
21.01.2017 12:22Так решение на поверхности (буквально), дайте буям возможность общаться по радио (у вас же считанные километры), буи самостоятельно на основе своих положений, уровня заряда и т.п. смогут решить, кому работать а кому отдыхать.
Кстати, буй с собственным двигателем, мегаидея?
Резерв лишним не будет, а то если что случись, пока наверху в лодке разберутся, пока буй заменят, внизу водолазы будут нервничать
p.s. текстовая коммуникация (с системами голосового синтеза в одну сторону, и использования клавиатуры с другой, в купе с заранее забитыми кодами и сценариями) на основе ультразвука уже давно у водолазов работает или тоже как с GPS получается?StDmitirev
21.01.2017 15:49+1Буи с собственными двигателями разрабатывались ещё в СССР, но с переменным успехом. Сложно было обеспечить большую автономность при разумных габаритах. Сейчас, с технической стороны, проще, но у пользователей таких потребностей нет.
Текстовая коммуникация с заранее забитыми кодами и сценариями, голосовым синтезом и клавиатурой получается не слишком удобной.
r9laj
20.01.2017 14:52+2Ребята, вы просто молодцы! Уверен, с реализацией вашего изделия проблем не возникнет.
Хочу попросить вас рассказать немного о технической стороне передачи цифрового сигнала гидроаккустическими волнами. Как устроена антенна? Из вашего рассказа понял что в качестве излучателя применено пьезокольцо. Какая максимальная частота несущей (есть ли оптимальный диапазон частот для этого)? Какой вид модуляции применен и как боретесь с отраженным сигналом? OFDM? Какая выходная мощность сигнала и какое максимальное расстояние достижимо? На сколько вообще применимы принципы распространения ЭМ волн для гидроаккустики?
Мне кажется, что логичным развитием вашего навигационного устройства было бы добавить в него средство общения для водолазов — типа рацию. Для этого, используя современные кодеки, требуется цифровой канал минимум 2000 бит/сек, на сколько возможно это обеспечить под водой? Если данной полосы пропускания не достичь, то можно было бы сделать пересылку хотя бы текстовых сообщений — своего рода SMS чат. Уверен, такой девайс расхватывали бы как горячие пирожки не только спецслужбы, но и простые любители дайвинга. :-)
AlekDikarev
20.01.2017 14:58+1Несущая 20 кГц. Используетcя BPSK. Для борьбы с многолучевостью — когерентный прием, RAKE-receiver, относительно большая база сигнала. Максимальная дальность связи (энергетическая) — до 3000 метров.
На сколько применимы — это риторический вопрос, в двух словах не смогу ответить да и очень это субьективно. Самые главные отличия — это скорость распространения и влияние доплера.
«Типо рация» — давно существует, называют ее «Underwater telephone» — обычная SSB (АМ-модуляция) с несущими порядка 32 кГц для простых смертных и что-то в районе 6-8 кГц у вояк.
СМС — есть у UDI (14 предустановленных сообщений для 14 абонентов). СМС сделать не проблема, но пока на сколько нам известно это не особо востребованно.Wan-Derer
26.01.2017 00:20СМС сделать не проблема, но пока на сколько нам известно это не особо востребованно
Возможно, была бы востребована опция передачи служебных сообщений, типа «Отбой задания, все на базу» или «Все идём на точку 5». Транслировать можно отдельным передатчиком на «базе».AlekDikarev
26.01.2017 21:51Не, там люди привыкли голосом и смс воспринимают скептически. Набирать и тыкать меню там ни у кого нет времени
StDmitirev
26.01.2017 22:23Голосом просто быстрее и на привычном языке, когда междометия не выпадают.
Wan-Derer
26.01.2017 22:47Максимально простой вариант: 5 лампочек на приёмнике и 5 кнопок на базе. Соглашение о значении кода — при подготовке к погружению :)
AlekDikarev
27.01.2017 00:19А если на подходе в виду условий поменялись планы и первая группа заходит с левого борта а вторая должна с кормы?) при этом связи с базой нет. Соглашения о значении кода здесь малоприменимы
AleXP3
27.01.2017 00:37Уважаемый Wan-Derer скорее всего водолаза трехболтового никогда не видел. Это существо строго бинарное и подсовывать ему «всего пять лампочек»(с) просто травмоопасно )

Wan-Derer
27.01.2017 10:02Что правда то правда, водолазов не встречал :)
Просто если есть возможность передавать осмысленную информацию, жалко этим не воспользоваться.StDmitirev
27.01.2017 12:08Вопрос в способе и уместности передачи этой осмысленной информации. Лампочки не подходят. Плюс, опять же, усложнение системы, что чревато последствиями)))
StDmitirev
27.01.2017 12:11+1З.Ы. Картинка чудесная. Судя по всему, это ихтиандр, а противогаз нужен для очистки воды.

BalinTomsk
20.01.2017 23:00Уже давно есть модемы, можно было бы добавить 2-х стороннюю связь.
http://www.evologics.de/en/products/acoustics/s2cm_series.htmlAlekDikarev
20.01.2017 23:08Если вы внимательно читали статью, то могли видеть что я упомянул evoligics. Опять же, у нас реализован принцип пассивного приёма, на что я несколько раз обратил внимание, именно для того, чтобы стало возможным неограниченное число позиционируемых объектов. Более того, модемы есть и у нас. И плюс ко всему оцените массогабаритные показатели устройств из вашей ссылки и узнайте их стоимость.
BalinTomsk
21.01.2017 00:29+2Если вы внимательно следили за отступами в ответе то заметили бы что я отвечаю r9laj на его вопрос о связи. :)
Shm-Alex
20.01.2017 14:59Завидую — очень интерестная работа!
скриншот
RedWave v 1.0.0 приложение RedWaveNodeHost
Вижу на треке вылетевшие точки, предполагаю что датчик принял не основной сигнал от одного из буёв, а отражённый от какого-то подводного препятствия я прав?
как с этим боретесь? ведь если датчик принял отражённый сигнал а не основной — расстояние до датчика будет расчитано с ошибкой.
Я так понимаю на приёмник с буя должна прийти информация об реальном положении буя и времени когда отправлен сигнал, эта вся информация передаётся по звуковому каналу как осуществляется разделенние канала?
Почему буя необходимо четыре вроде для позиционирования достаточно 2? (зная с какой стороны пришёл сигнал )
AlekDikarev
20.01.2017 15:05Да, это один из первых результатов в непростом водоеме. Скорее всего вы правы. В той версии каждая точка была независима от остальных, сейчас мы сильно улучшили отбор «лучей», добавили фильтрацию, значительно улучшили приемник и аналоговый тракт.
Правильно понимаете, на приемник должны прийти географически координаты каждого буя, время передается но просто чтобы быть ближе к GPS, в навигации оно не используется. Определяются относительные времена прихода сигналов со всех буев, а потом уже, после определения своего положения можно понять когда был излучен сигнал того или иного буя и выдать пользователю UTC время в сообщениях RMC например.
2 буя недостаточно, и с какой стороны пришел сигнал — неизвестно)
Wan-Derer
26.01.2017 00:40Вижу на треке вылетевшие точки, предполагаю что датчик принял не основной сигнал от одного из буёв, а отражённый от какого-то подводного препятствия я прав?
как с этим боретесь? ведь если датчик принял отражённый сигнал а не основной — расстояние до датчика будет расчитано с ошибкой
Пловец движется с конечной, не очень высокой, скоростью. Он не может за секунду «прыгнуть» на 100 метров. И на 10 не может. Соответственно, есть диапазон ожидаемых координат на каждый следующий момент времени. Всё что сильно вываливается из диапазона, отфильтровывается.AlekDikarev
27.01.2017 12:53+1Картинка с выпавшими точками — там все измерения независимые, это одна из первых «технологических» версий.
Сейчас конечно уже давно все с фильтрами.
kahi4
20.01.2017 15:13+1Видятся мне проблемы ГНСС тут еще более актуальными. А есть готовая модель ошибок, чтобы не расписывать все по-отдельности? Хотелось бы увидеть.
Ну если конкретнее — аналог "ионосферных задержек" в виде разной скорости распространения аккустического сигнала в жидкосте видит мягко говоря не надуманной проблемой, особенно когда есть перепады температуры (а они есть всегда). Как с этим боретесь? Так же используется две несущие частоты? (если вы об этом написали, виноват, но вроде не видел в статье).
Многолучевость в воде в окрестности дна, где куча коряг и прочего, делает решение навигационной задачи невозможным или же я переоцениваю его влияние?
AlekDikarev
20.01.2017 16:30«куча коряг и прочего» — это неопределенное дно. Больше влияют например причальные стенки бетонные. Влияние несомненно есть но все не так мрачно, как вы описали. Все зависит от конкретных условий, и в большинстве условий мы успешно работаем.
kahi4
20.01.2017 19:20Не подумайте, что это наезд, мне действительно интересно и проект выглядит многообещающим. Но все же ваш ответ напоминает "мы вас внимательно выслушали и предпимем все, чтобы это исправить".
Видится мне, что сферический водолаз в вакуумном океане — вещь не сильно полезная. Как правило, водолазы все же работают в затопленных развалинах/у причалов/ в непосредственной близости к кораблю, т.е. в окрестности объектов, которые очень даже интенсивно отражают звук. В общем, хотелось бы больше конкретики. А структуру и содержимое передаваемых пакетов, альманаха и прочего — это я заелся или можно увидеть?
Еще раз, это не наезд, мне действительно не детски интересно, так или иначе все же у меня диплом по навигационным системам, хочется вспомнить добрые студенческие годки...
AlekDikarev
20.01.2017 19:40Я привел данные экспериментов из реальных водоемов, при чем все они — мелководные. Данные из канала имени москвы — там и причальная стенка, и крутой с одной стороны берег и кусты, торчащие из воды. Беломорские данные — сальва близ п. Пояконда — там и перемешивание с пресной водой, клин солености, сложный рельеф дна, опять же причальная стенка, приливное течение по форватеру и почти стоячая вода у западного берега. Есть еще куча экспериментальных данных из озер, рек, данные с братского водохранилища (где приемник был установлен на подводном гусеничном шасси и прекрасно отработал) и морей которые просто не уместить в статью. То есть я не говорю о «сферическом водолазе в вакууме».
Дело в том, что я не могу отвечать за абсолютно любые условия. Тот же GNSS работает не везде.
По поводу структуры пакетов и альманаха — «боюсь, я не уполномочен обсуждать сокровенную доктрину» =) Постарайтесь понять.
Wan-Derer
26.01.2017 00:26КМК, водолазу, работающему на конкретном объекте (затопленное судно и т.п.), навигация не нужна. Нужна она когда производится поиск этого объекта. И в этом случае условия вполне подходящие.

4ebriking
20.01.2017 16:55Очень хорошая статья про просто отличную работу.
Скажите пожалуйста, как вы обошли подводные грабли общения с родным государством? — Оно очень любит разработки, которые _можно_ использовать в армейских (не обязательно военных) целях — объявлять «разработками двойного назначения» и секретить (а самих разработчиков делать автоматом невыездными).AlekDikarev
20.01.2017 17:08Никаких таких проблем нет и не было
r9laj
20.01.2017 17:34Я бы сказал даже более того, нашему государству очень сложно что-то пледложить хотя бы испытать. По смоему опыту скажу, у нас есть инициативная разработка, изделие которое с большой долей вероятности можно классифицировать как двойного назначения. Оформлен патент. Собрана пробная серия из пары десятков изделий. Выставляли его на Интерполитехе, получили массу приятных отзывов, но за три года ни одного обращения от профильных организаций с целью «хотя бы попробовать». Что бы продать государству нужно очень сильно постараться, если конечно вы изначально не выполняете какой-то госзаказ на НИОКР. :-)
AlekDikarev
20.01.2017 17:41Нет, это как и вашем случае изначально была инициативная разработка, я ведь не даром написал «с нуля».
Creathor
21.01.2017 01:12+2Как ответственный за общение с родным государством ответственно заявляю: родное государство сделало очень и очень много для того, чтобы у нас всё получилось.
Сами не ожидали, но факт жизни.
Говорю спасибо как отдельным людям, представляющим государство (в погонах и без), так и целым государственным институтам.
menotal
20.01.2017 17:06не увидел в комментариях ответа на вопрос, почему нужны 4 буя, хотя из геометрических соображений должно хватить трех.
AlekDikarev
20.01.2017 17:06Лучше иметь избыточность и запас. По-этому сделали четыре.
r9laj
20.01.2017 17:40Запас это хорошо, но не пробовали ли вы по четырем буям опделять глубину поглужения, по аналогии с GNSS? Я не силён в триангуляции, но где-то попадалась информация, что по четырем спутникам можно опреледять координаты не только на сфере, но и в 3D пространстве. Для определения координать на сфере достаточно трех маяков/спутников/буёв.
AlekDikarev
20.01.2017 17:42+3Датчик давления дает точность порядка сантиметра и это прямое измерение. Прямое измерение всегда лучше косвенного.
r9laj
20.01.2017 18:19Это понятно, что барометром точнее будет. Просто любопытства ради, на сколько такой способ определения глубины возможен. Резервный источни информации о глубине был бы не лишним. Если будете реализовывать (а это чисто программмисткая задача), используйте Калмана (sensor fusion) для обьединения данных от двух разных источников информации, по аналогии с БИНС.
Кстати, а это мысль — использовать БИНС на дешевых MEMS сенсорах и корректировать Калманом по данным от буёв — чисто гипотетически, можно увеличить точность!StDmitirev
21.01.2017 01:25+1Возможен и рассматривался, но не используется из-за наличия датчика давления. Его точности хватает для наших задач. Объединять данные тоже пока не планируем т.к. данная задача, скорее, из разряда интересных, но не дающих существенного увеличения точности. Зато займёт наше время и ресурсы системы.
kahi4
20.01.2017 19:29Я выше отвечал зачем нужно 4 спутника в GNSS, зачем тут — не знаю. Однако больше — лучше. Хоть 20, наживите на МНК и будет у вас великолепная точность. Однако в данном случае, видится мне, трех действительно хватит.
pitsakh
23.01.2017 08:30+2Правильно я понял, что поправка на соленость и температуру воды (вычисление текушей скорости звука) применяется на стороне приемника?
Формально точность позиционирования зависит от скорости звука на портяжении всей трассы сигнала, но видимо в вашем случае точность от допущения постоянности скорости звука сильно не страдает на фоне точности базовых координат.
Еще хочу поделиться своим опытом:
Одной из проблем подводного позиционирования является возможное наличие термоклинов.
Я для нефтянки делал смежный проект по оценке энергетики и прохождения сигнала в LBL массиве с учетом вертикального профиля скорости звука (моделирование распространения).
Тут немного скриншотов:



Creathor
23.01.2017 09:24+1о, круто.
Да, поправки — на стороне приёмника.
По-хорошему, профиль скорости звука, конечно, нужен, но это всё для сантиметровой точности.
У нас другой акцент — скорость развёртывания и простота использования.
AlekDikarev
23.01.2017 10:06Конечно на стороне приемника, все верно. В идеале нужна трассировка луча, однако это нетривиальная задача в виду того, что необходимо как минимум знать профиль дна. Профиль скорости звука наш приёмник попутно собирает.
sinapsist
25.01.2017 18:39+1Молодцы!
Я участвовал в подобном проекте — тоже была небольшая команда. Правда у нас была другая идея — использование уже существующих передатчиков для определения местоположения (и других параметров группы водолазов: таких как давление в балоне, физические параметры водолаза) относительно лодки и передача сообщений (к примеру о всплытие) с лодки водолазам. За год было сделано два вполне рабочих прототипа. Жалко что потом разработку прекратили…
Кстати мы столкнулись с проблемой определения расстояния между источником ультразвука и приемником из-за невозможности синхронизировать часы (точнее эта точность в нашем случае составляла порядка 100 метров, что было недопустимо). Скажите, пожалуйста, каким образом вы считали расстояние от передатчика до приемника? Наверху по тексту было небольшое обсуждение вопроса, но я, честно говоря, так и не понял основную идею.
И еще буквально один вопрос — теоретически (опять же для получения точного растояния), необходимо калибровать как передатчики (пьезокерамики имеют погрешности по частоте), так и приемники (ультразвуковые сенсоры имеют разную чувствительность), каким образом, решали вопрос калибровки сигналов?
Заранее спасибо!AlekDikarev
25.01.2017 18:44Расстояние не определяется «напрямую», координаты вычисляются по такому же принципу, как и в GNSS — TDOA (Time difference on arrival).
При этом не требуется синхронизации приемников с «созвездем» буев.
Не совсем понял вопрос — как связаны хр-ки керамики с точностью измерений расстояний ну или определения времени прихода сигнала (TOA).sinapsist
26.01.2017 00:21Спасибо большое за ответ!
Дело в том, что если передатчики передают сигнал на немного разной частоте, соответственно и вычисляемое расстояние (задержка в случае GNSS — TDOA) будет разная. Если один буй будет иметь более высокую частоту чем другой, то местоположение будет «косить» в сторону этого буя.
По поводу приемника, согласен, что в вашем случае это не критично, так как он один.
Правда в нашем случае опыты показывали, что принимаемые сигналы от одного передатчика при одинаковой мощности сигнала, передаваемые один за другим, при приеме на выходе с операционного усилителя устройства каждый раз давали близкие к друг другу, но все-таки различные значения, что соотвественно тоже сказывается на точности — в данном случае оно будет просто прыгать из стороны в сторону.
Можете, пожалуйста, обьяснить, почему для Вашего устройства отсутствие калибровки не критично?
А еще небольшой вопрос — те сенсоры, которые я видел — они были направленные. У Вас он получается один и omni? Это из-за антенны или сам сенсор такой?
Заранее спасибо!AlekDikarev
26.01.2017 01:17+1Отличие керамики повлияет на АЧХ, но я не могу понять как оно должно вызвать «смещение» частоты. То что вы описываете больше похоже на доплер. Мы не используем тональные сигналы (это перестало быть модным лет 50 назад). Честно говоря по вашим словам мне трудно понять что было у вас.
Мы применяем кольцевые элементы, диаграмма направленности у них — тор, но очень близка к сферической для нашей полосы частот.
volod_ka
25.01.2017 18:32Подскажите пожалуйста, а вы как-нибудь решали вопрос с патенто-держателями на «гидро-аккустические системы навигации». А то ведь накинутся они на вас как коршуны, когда проект станет коммерчески интересным
AlekDikarev
25.01.2017 18:34+1«Гидроакустические системы навигации» — это предельно широкое понятие. Конкретно на нашу систему и метод у нас есть патент. Плюс есть патент на полезную модель — компоновка приемника.

VitalyNasennik
25.01.2017 18:34Браво! Отличная разработка! Молодцы!
Не удержусь и подскажу пару идей на будущее. Во-первых, добавить интегральные акселерометры, гироскопы и магнитометр — и через фильтр Калмана это всё объединить. Со своих буёв вы получаете координаты, пусть неточно, но без накапливающейся при интегрировании погрешности. С акселерометров вы непосредственно получаете ускорение, которое, позволит приёмнику точно знать, что резкое изменение вычисленных координат — это погрешность, а не реальное движение, что заметно улучшает точность вычисления своих координат на коротких интервалах. Для работы акселерометров обязательно нужно знать своё направление, для этого используются гироскопы, для чего они частенько объединяются в одном модуле. Но гироскоп тоже имеет накапливающуюся ошибку интегрирования — вот для этого используется трёхосевой магнитометр, который подключается к гироскопу-акселерометру и позволяет избавиться от этого дрейфа за счёт привязки к магнитному полю Земли. Причём, это всё можно делать не самим, а взять готовые модули, которые активно применяются в различных самоделках, об чём были статьи в том числе и тут.
Во-вторых, всё тот же фильтр Калмана пригоден для одновременного выделения сигнала буя и решения навигационной задачи. При этом, примерно зная своё положение, вы можете точно привязаться к прямому лучу на буй, просто игнорируя многолучёвость распространения, даже если прямой луч сильно слабее переотражённых.
В-третьих, для борьбы с многолучёвостью китайцы в своей системе Beidou дополнительно модулируют сигнал по сравнению с GPS и ГЛОНАСС — и вам тоже не повредит взять эту идею на вооружение.AlekDikarev
25.01.2017 18:38«Игнорировать» многолучевое распространение нельзя.
У нас используется сложный широкополосный сигнал и когерентный прием. Я кажется отвечал об этом выше.
С оптимальной фильтрацией мы знакомы.





eee
Великолепная работа! Я правильно понимаю, что у вас получился по сути рестранслятор-модулятор GPS сигнала в подводное пространство посредством звука, а приемники это обычные GPS применики только с демодулятором?
AlekDikarev
Спасибо! Не совсем обычные применики, на самом деле акустический приемник и передтачик — это самая сложная часть, именно имея хороший метод передачи данных через воду многие вещи становятся возможными.
Там именно с нуля написана вся сигнальная обработка и GPS оно напоминает лишь по духу.
eee
Понятно. А скажите не влияет ли относительно низкая скорость распространения звука по сравнению с радиоволнами на точность позиционирования, ведь ЕМНИП GPS в основном полагается на очень высокую точность часов? Или на таких расстояниях это некритично?
Utopia
Мне кажется, в данном случае это плюс — триангуляция по микросекундам скорости света сложнее, чем по приличной задержки скорости звука в воде. Условно: 1 мкс ошибки в часах на скорости света — 0,3км (грубо), в воде — 1,5 мм. Так что в данном случае это скорее в плюс.
vconst
Спутниковые системы позиционирования используют — трилатерацию, а не триангуляцию.
paluke
Как раз низкая скорость звука снижает требования к точности часов. Для gps ошибка часов в 1/30000000 секунды дает ошибку позиционирования на 1 метр (ну приблизительно). Для звука в воде — 1/1450 секунды — 1 метр.
il--ya
Задача синхронизации буёв уже решена использованием GPS, нет? Уж до сотен микросекунд не проблема синхронизировать.
senglory
А почему не стали инерциальную систему с гироскопами делать? Вроде как ей никакая связь с поверхностью не нужна вообще.
StDmitirev
Из-за общей проблемы инерциальных систем — накапливающейся ошибке. Плюс не самые маленькие габариты гироскопов.