 Эта история началась с того что я застрял в пробке на хайвее, не особенно большой, но полчаса простоял практически на месте. И, как это часто бывает, пробка рассосалась сама по себе — не было впереди ни аварии, ни ремонта, просто машины в какой-то момент начали двигаться быстрее, еще быстрее, и все — свободная дорога впереди.
Эта история началась с того что я застрял в пробке на хайвее, не особенно большой, но полчаса простоял практически на месте. И, как это часто бывает, пробка рассосалась сама по себе — не было впереди ни аварии, ни ремонта, просто машины в какой-то момент начали двигаться быстрее, еще быстрее, и все — свободная дорога впереди.
Чем обычно занимаются в пробках? Ну кто-чем и когда-как, а я в тот день был в мирном философском настроении — просто сидел и размышлял. Вспомнил в частности пост на Гиктаймс о робомобилях где в комментариях бурно сравнивали манеру вождения людей и роботов и в конце кажется пришли к выводу что будущее на дорогах за AI, при нем и движение станет безопаснее и средняя скорость возрастет. Интересно, а пробки тогда будут? Другими словами, насколько пробки обусловлены внешними (обьективными) обстоятельствами, и насколько эффектом толпы, агрессивной или наоборот тормозной манерой вождения? Заодно вспомнилась прочитанная когда-то книга где утверждалось что моделирование дорожного трафика — одна из самых сложных математических задач, которая до сих пор не решена. Ну это наверное давно уже неправда, читал я это давно и книга уже тогда была не новой, сейчас уже наверняка и теории правильные написали, и на компьютерах своих все посчитали. Хотя… пробки же остались? В общем, полет фантазии было уже не остановить.
Итак, под катом мы попытаемся построить более-менее осмысленную модель движения транспорта на дороге и, если повезет, постараемся смоделировать разницу в вождении водителя-человека и AI. Я разумеется отдаю себе отчет что этой проблемой профессионально занимаются целые организации и вообще очень умные люди, но тем интереснее. И вообще, ставьте себе нереальные цели.
И еще одно — я убежденный сторонник думанья головой, поэтому в этом посте компьютерного моделирования не будет, вообще совсем не будет, только хардкорный карандаш и бумага.
Для начала надо сказать что существует два похода — микроскопическая модель и статистическая. Первая рассматривает отдельно движение каждой машины в потоке как отдельный набор независимых переменных в одной огромной системе уравнений и, по понятным причинам, пользуется наибольшей популярностью у теоретиков. Вторая рассматривает всю совокупность как непрерывную среду где каждая отдельная машина описывается лишь вероятностно. Из чувства противоречия с этого второго случая и начнем.
Простейшая статистическая модель
Пусть имеется одна полоса с равномерно распределенными машинами с линейной плотностью ?. Однако скорости у всех машин разные, будем считать что вероятность иметь скорость v описывается плотностью вероятности P(v,t) зависящей естественно от времени и равной в момент t=0 некоторой известной функции P(v,0). Можно без ограничения общности считать что вероятность P(v,t) определена на интервале от нуля до (да простят меня дорожные полиции всех стран) бесконечности. Определены также понятия нормировки и средней (групповой) скорости:

 (1.1)
(1.1)
За время dt каждая имеющая скорость v проходит расстояние vdt и может как "исчезнуть" догнав более медленную и потеряв скорость, так и "увеличить массу", будучи догнанной более быстрой. Легко сообразить что за интервал времени dt вероятность машине со скоростью v догнать более медленную машину со скоростью u (и затормозиться) будет P(u,t)(v-u)dtdu и симметричноe выражение для вероятности быть догнанной более быстрой машиной (и затормозить ее). Таким образом изменение плотности вероятности со временем:
 (1.2)
(1.2)
Немного подумав достаточно легко понять что решение должно иметь вид A(v)B(t)exp(-?vt) и отсюда полное решение:
 (1.3)
(1.3)
Уравнение получилось изящное, но незамкнутое, поскольку средняя скорость сама зависит от времени. Однако нас не интересуют детали изменения плотности вероятности P(v,t) со временем, тем более что они зависят от произвольной начальной функции P(v,0), поэтому мы можем воспользоваться (1.1) чтобы замкнуть уравнение относительно ?v
 и отсюда
и отсюда  (1.4)
(1.4)
вот с этим уравнением уже можно работать, давайте рассмотрим пару частных случаев для иллюстрации.
Пусть изначально все машины движутся строго с одной скоростью:
 отсюда
отсюда
 как и должно быть.
как и должно быть.
Пусть теперь изначально скорость распределена равномерно в некотором интервале:

При этом средняя скорость падает как 1/t a среднее пройденное расстояние растет логарифмически:
 — и это хорошая новость для тех кто читает этот пост стоя в пробке — до места вы все таки доберетесь, правда за экспоненциальное время.
— и это хорошая новость для тех кто читает этот пост стоя в пробке — до места вы все таки доберетесь, правда за экспоненциальное время.
Тут есть однако одно кажущееся противоречие — если в потоке присутствуют машины со сколь угодно малой скоростью, как может среднее пройденное расстояние увеличиваться со временем? Ответ в том что число машин со строго нулевой скоростью тоже равно нулю. Если мы возьмем начальное распределение в виде:

То есть почти все машины движутся с одинаковой скоростью, а некоторая очень малая часть просто стоит, то групповая скорость будет падать экспоненциально

И среднее пройденное расстояние стремится к фиксированному пределу.
Таким образом мы потратили пару листов бумаги и показали что на однополосной дороге все рано или поздно уткнутся в хвост самой медленной машине и будут тащиться с ее скоростью — блестящий результат. Попробуем теперь немного более реальный вариант.
Шаг навстречу реальности
Если вы читали внимательно, к этому месту у вас должно было возникнуть чувство законного недоумения — а где же пробки? С какой стати мы полагаем линейную плотность ? константой не зависящей ни от времени ни от координаты? В конце концов пробка и есть по сути скопление машин. Все правильно, в рамках нашей текущей модели мы рассматриваем профиль движения усредненный по очень большому интервалу, настолько большому что усредненная по нему плотность постоянна. Внутри него машины сбиваются в колонны между которыми совершенно пустые промежутки, но в характерном масштабе нашей модели все это несущественно. Характерный размер неоднородности, колонны или промежутка, растет со временем и вот, когда он наконец сравняется с характерным масштабом, пробка… могла бы возникнуть, но не возникает, потому что модель больше неприменима. Надо искать более детализированную модель. Обратите также внимание, что для отдельной машины движущейся в потоке нет никакого распределения по скоростям P(v,t) с которым мы работали раньше, существует только скорость v(x,t) и локальная плотность ?(x,t). Вот с ней и поработаем.
Прежде всего, для плотности должно выполнятся уравнение непрерывности:
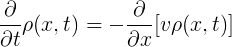 (2.1)
(2.1)
абсолютно фундаментальный закон по сути означающий что сколько в трубу втекло, столько должно и вытечь. Заметьте что ?v — это просто число машин пересекающих сечение дороги за единицу времени.
Разумеется у этого уравнения существует бесконечное множество решений, например это может быть произвольная функция f(x-vt) описывающая движение произвольного профиля плотности с произвольной скоростью v. Если перейти в систему координат движущуюся вместе с машиной, то это выражение принимает еще более простой вид: ?v=const. Если скажем плотность меняется по закону ?f(x -vt) и впереди участок дороги с пониженной скоростью u, u < v, то там профиль плотности будет выглядеть как Pf(x-ut), где ?v=Pu. Такая модель подобна идеальному газу и описывает идеальное поведение трафика на дороге — при уменьшении скорости происходит пропорциональное увеличение плотности а число машин пересекающих сечение дороги в единицу времени постоянно (с точностью до флуктуаций f(x)), вы всегда можете рассчитать время за которое вы проедете определенное расстояние и оно не будет зависеть от других машин на дороге.
Так все-таки, где же пробки?
Модель идеального газа описывает состояние невзаимодействующих частиц, неидеальность начинается при учете взаимодействия. Аналогично получается и у нас — придется учитывать притормаживание когда машины оказываются слишком близко. Тормозной путь можно описать выражением v2/2a+v?+d, где а — ускорение комфортного торможения оцененное (грубо) константой; ? — величина размерности времени и порядка времени реакции водителя; d — величина порядка длины автомобиля.
Пространственная плотность ? должна быть обратной величиной. Получается? Нет, очевидно что в пределе больших скоростей плотность должна падать как 1/v а не 1/v2, а у нас получилось что даже поток машин через сечение дороги ?v падает с ростом скорости. Ошибка в том что водители вовсе не держат интервал обратно пропорциональный тормозному пути, это было бы так если бы впереди идущая машина могла бы остановиться мгновенно — слишком сильное предположение, на самом деле она тормозит с тем же самым ускорением a. Тогда у нас исчезает квадратичный член и получается разумное выражение:
?max=1/(v?+d) (2.2)
при увеличении плотности до 1/d (то есть бампер в бампер) машины могут только стоять, а при росте скорости поток стремится к пределу: ?v=1/?. Это выражение для предельной плотности при данной скорости, если автомобили сойдутся еще теснее, они начнут притормаживать. Может быть я слишком подробно на этом остановился, но хотелось показать как правильно заложенная модель начинает корректировать сама себя, через рассмотрение частных и предельных случаев выявляет ошибки.
Пусть по дороге движется колонна машин со одинаковыми скоростью v и плотностью ?. Если эта колонна вьезжает на участок с пониженной скоростью u<v, то плотность машин увеличивается, как мы уже видели раньше, ?*=?v/u.

Однако, если плотность приближается к критической, может оказаться что новый участок дороги неспособен пропустить такой поток (максимальный поток машин через сечение дороги ?max(u)=u?max(u)=u/(u?+d) и монотонно уменьшается с уменьшением скорости)
?*=?v/u > ?max=1/(u?+d).
Теперь в игру вступает уравнение (2.1) описывающее изменение скорости и профиля плотности, которое однако имеет бесконечное множество решений, включая нестационарные и колебательные. Давайте для оценки сверху возьмем идеальный случай оптимизирующий пропускную способность дороги, для этого каждую машину должен вести всеведущий демон Максвелла, но тем не менее. Тогда каждая машина будет притормаживать заранее в точно угаданный момент до мистически угаданной скорости u, примерно вот так:

Более того, граница торможения будет двигаться влево с легко вычисляемой скоростью:
[?v-u/(u?+d)]/[1/(u?+d)-?]=[?-?max(u)]/[?max(u)-?] (2.3)
А что происходит на переднем фронте? Предположим что ограничение на скорость в некоторый момент исчезло, тогда фронт начнет испаряться — машины начнут ускоряться до начальной скорости v и фронт начнет тоже двигаться влево. Однако скорость испарения заведомо меньше скорости торможения; главным образом потому что водитель тормозит сразу же как только заметит стоп-сигналы впереди идущего, а для разгона ему нужно оценивать расстояние до впереди идущей машины и ее скорость. Оценить скорость испарения фронта достаточно трудно без привлечения эмпирических соображений, однако мы можем предположить что она может быть как больше, так и меньше скорости левой границы (2.3), которая в свою очередь зависит от ограничения скорости u. И, если она окажется меньше, то мы получаем что-то типа солитона на дороге — устойчивое образование, возникающее при случайном кратком торможении одной из машин и существующее конечное время. Важно добавить, что для возникновения такого солитона уже необязательно реального ограничения скорости, достаточно если одна из машин спонтанно замедлится на время больше ? до скорости меньше некоторой критической.
До собственно пробок остался один маленький шаг, достаточно заметить что образовавшийся солитон нестабилен, его плотность равна критической (2.2) и любое случайное достаточно сильное торможение одной из машин в колонне вызовет новый аналогичный процесс и образование нового уплотнения с еще меньшей скоростью. При достаточно большом времени жизни такого образования этот сценарий будет повторяться и лавинно накладываться один на другой вплоть до достижения разреженного участка на дороге или полной остановки машин в конце колонны, что мы собственно и наблюдаем в реальной жизни.
Сейчас можно было бы привлечь теорию вероятностей и прикинуть длину получившегося солитона (которая определяется флуктуациями плотности трафика), а так же время его жизни и вероятность возникновения еще больших уплотнений и шансы полной остановки движения, так же как и среднее уменьшение пропускной способности дороги. Короче, основываясь на этой простой модели возможно построить полное вероятностное описание дорожного трафика. Однако я подозреваю что давно исчерпал лимит на количество формул в посте, кроме того, потребовалось бы привлечение каких то эмпирических и/или количественных данных, чего я старался избегать всеми силами. Лично я уже достиг понимания как случаются пробки и получил от этого некоторое удовольствие. Кроме того я понял какая злая сила вырвала полчаса из моей жизни, и жить мне сразу стало лучше и веселее.
А как же роботы?
А с ними все просто, поскольку я не делал никаких человеко-специфических предположений, базовая модель верна и для них. То есть если заставить робомобили ехать по дороге на пределе ее пропускной способности, в потоке движения могут возникать спонтанные возмущения приводящие к замедлению вплоть до полной остановки. Однако вероятность таких возмущений можно постараться существенно понизить.
- Во-первых, в потоке состоящем исключительно из роботов гораздо реже возникают спонтанные флуктуации, роботы не чихают за рулем, не роняют зажженную сигарету, не отвлекаются на болтовню пассажиров и субьективных причин притормаживать у них практически нет. Однако обьективные причины (скользкий участок дороги например) все-таки остаются.
- Во-вторых, теоретически время реакции ? робота намного меньше, в пределе стремится к нулю. Однако я боюсь что разработчики робомобилей перестраховываясь искусственно его завышают в алгоритмах вождения. Со временем этот резерв тоже будет задействован.
- В-третьих, роботам чужды эмоции, в частности нетерпение, зависть и жадность. Это позволяет им держать дистанцию чуть-чуть больше минимально необходимой, в результате линейно чуть-чуть снижается пропускная способность, однако вероятность возникновения пробок падает нелинейно во много раз. Однако для этого необходимо чтобы на дороге робомобили как минимум преобладали.
- В-четвертых, и это самое существенное что отличает их от человека — роботы гораздо ближе к демонам Максвелла. В частности, если позволить им обмениваться информацией на дороге, можно создать виртуальный распределенный ИИ управляющий движением на каждом участке. Как простой пример — колонна из фур может очевидно выиграть если каждая будет знать скорость первой в колонне фуры в каждый момент. Еще один — если становится известно что где-то впереди (может быть достаточно далеко) начинается уплотнение, машины могут заранее увеличить интервал и таким образом блокировать распространение пробки. Ну и наконец, разгонное время можно кардинально уменьшить если машина получает сигнал об ускорении от впереди идущей, это позволило бы резко сократить время жизни солитона и предотвратить лавинный эффект.
- Ну и наконец для тех кто проектирует и строит дороги — не забывайте что у каждой дороги с ограничением скорости vmax есть максимальная пропускная способность порядка vmax/(?vmax+d) и, если ожидается увеличение потока (город растет) на каком-то участке до этой величины, хорошо бы заранее предусмотреть расширение дороги или увеличение максимальной скорости. Ну это уже из области абсолютных фантазий конечно.
Я не знаю какие модели разрабатываются сейчас производителями робомобилей, и вообще, готовятся ли они морально к тому времени когда они будут преобладать на дорогах; но мне кажется что уже пора. Локальные алгоритмы вождения пора дополнять и расширять до кооперативных и тогда мы будем меньше тратить времени на стояние в пробках, а значит и мир станет немножко лучше.
PS: Изначально я планировал этот пост на Гиктаймс, но с удивлением обнаружил отсутствие подходящих хабов. На мой взгляд, правильным сочетанием было бы Математика+Занимательные задачи+Транспорт будущего, однако оказалось что первые два присутствуют только на Хабре, причем в разделе Разработка. Ну и ладно, пишу туда где хабы соответствуют.
Комментарии (107)

azsx
31.01.2017 08:11+1По моему мнению, на несколько полос пробки возникают из-за следующих причин:
1. Крайняя полоса занята под стоянку автомобилей. Закон о парковке по чётным дням слева, по нечётным справа.
2. Аварии — спонсировать гибдд?
3. Логистика, переходы, светофоры.
4. Самое главное, лихачи, которые перестраиваются из ряда в ряд ради мизерных выгод. Из-за них тормозит весь поток.
Вот лихачей бы в формулу включить.tundrawolf_kiba
31.01.2017 13:34Крайняя полоса занята под стоянку автомобилей.
Это оптимистичный вариант.Около работы часто вижу когда занято 2 полосы из 3.
red_dragon
31.01.2017 15:24+1Четвёртый пункт люто плюсую. И ещё обочники.

Areso
31.01.2017 15:27-1А также велосипедисты, таксисты, скутеристы, мотоциклисты, маршрутчики и стопицот других видов неадекватных людей на дорогах (как им только права выдают?)
TalWar
31.01.2017 15:29+1Ну раз лихачей собираетесь учитывать, то учитывайте тогда и тупиков в левом ряду. А то вот вылезет такой в левый ряд, когда ему и в правом ничего не мешало, а ты потом лихач-шашечник.

oYASo
31.01.2017 20:54+2На самом деле, от лихачества и прочего избавиться почти невозможно, потому что всегда будет кто-то опаздывающий. Даже штрафы могут быть не таким серьезными стимулом (ну, ты можешь опаздывать на самолет, либо ты катаешься на бентли и тебе по барабану все эти штрафы).
Мало того, как бы грустно это не звучало, но кроме как максимализации цены использования авто в городе, проблему почти никак не решить. Да, в Москве просто по-идиотски настроены светофоры, и вполне могут гореть зеленым пустой дороге 3 минуты, а на дороге с пробкой выделяться 15 секунд. Но если это проблему исправить (а я все-таки надеюсь, что ее исправят), то просто авто пользоваться станет чуть выгоднее, что увеличит количество машин, что увеличит пробки. Авто сейчас купить не проблема, если прям очень надо — есть тазы по 15-20 тысяч рублей, доступно почти всем.
В итоге действенные меры — дорогие парковки (на некоторое время они и правда неплохо разгрузили центр), платный въезд в центр, дорогие полисы страхования (можно было бы сделать, скажем так, зоны страхования) и прочее. При этом можно увеличивать количество каршеринг авто, уменьшая оплату за них. Можно делать сильные льготы мотоциклистам, можно сделать велосипедный транспорт самым главным на дороге (как это сделано, скажем, в Амстердаме).
Многого из этого не хочется видеть на наших дорогах, но, имхо, только это может привести к снижению потока авто.lgorSL
01.02.2017 02:13Мало того, как бы грустно это не звучало, но кроме как максимализации цены использования авто в городе, проблему почти никак не решить. Да, в Москве просто по-идиотски настроены светофоры, и вполне могут гореть зеленым пустой дороге 3 минуты, а на дороге с пробкой выделяться 15 секунд. Но если это проблему исправить (а я все-таки надеюсь, что ее исправят), то просто авто пользоваться станет чуть выгоднее, что увеличит количество машин, что увеличит пробки.
Не в первый раз встречаю такую точку зрения, из которого почти всегда делают вывод о том, что автомобилистов надо угнетать. Хотя реальная проблема в другом — в неразвитом общественном транспорте.
Если путь из А в Б на общественном транспорте занимает 2 часа, то автомобилист будет готов эти два часа простоять в пробке — потому что сидеть в машине с кондиционером явно комфортнее, чем стоять в битком набитой электричке.
Вариант с велосипедами для Москвы плохо подходит — она большая, и климат слишком холодный. Зимой по снегу или осенью под дождём мало кто захочет ехать 10-20 км на работу и потом обратно.
azsx
01.02.2017 02:28(ну, ты можешь опаздывать на самолет, либо ты катаешься на бентли и тебе по барабану все эти штрафы).
Против владельцев бентли есть такой мощный штраф с советских времён — дырки. То есть нарушаете ПДД, получаете дырку в права. Получили 20 дырок — лишают Вас прав на три года + обязательная пересдача экзамена.
Только вернув такую систему мы значительно повысим безопасность на дороге, но зато пойдём против основ общества потребления. То есть мы по закону будем лишать богатого человека возможности ездить, а значит смысла тратиться на авто. Как тогда в Германию буду перечислять излишки денег с РФ?
RoySpengler
01.02.2017 07:38Вот как раз этот способ на людей со сверхдоходами не действует вообще — им ничего не мешает ездить и без прав.
Только привязка штрафа к стоимости машины И доходов владельца, причём штрафы должны быть неотвратимыми (В Нижнем Новгороде есть уже люди, использующие «одноразовые» машины)azsx
01.02.2017 08:16им ничего не мешает ездить и без прав.
Человек, которые ездит на ТС, при этом его лишили прав. Помимо штрафа в 30 тысяч машина помещается на штраф стоянку, с последующим квестом по выкупу. Но это минимальное наказание, есть 15 суток или 200 часов работ.
Не так уж и мало, на самом деле.RoySpengler
01.02.2017 08:51Если честно, то даже для меня штраф в 30 тысяч вообще не проблема. Для «человека на бентли» (нарицательно, это может быть и роллс-ройс или мазератти) — это вообще доход за несколько часов. Шансов, что сотрудник ГИБДД решит тебя остановить — крайне мало, соответственно, даже если раз в полгода-год и попадёшься, то просто отдав сотруднику ГИБДД полтинник, просто поедешь дальше. Разумеется, что ни о каких часах или сутках речь не идёт вообще
azsx
01.02.2017 09:18RoySpengler такой тонкий момент. Есть статья вида «математика царица всех наук и мы избавим вас от пробок с роботами». Так как вряд-ли внезапно получится выгнать с дороги всех людей и решить многие проблемы, я в комментарии тонко намекаю, надо в формулах учитывать лихачей.
У Вас вопрос другой. Вот лишили человека прав, он всё равно ездит. По вашим словам, его останавливают раз в год, человек отдает 50 тысяч и едет дальше. По моему опыту и останавливают чаще, чем раз в год, и машину на штрафстоянку забирают, и работы назначают тем, кто никак иначе не понимает. Не совсем понимаю, как взятки сотрудникам гибдд где-то там у вас, можно связать с пробками на дорогах.RoySpengler
01.02.2017 10:20В этой статье как раз указано, что пробки формируются именно водителями, которые ездят не «как все», а постоянно перестраиваясь и вынуждая остальных участников тормозить и т.д., что провоцирует пробки.
Соответственно, можно существенно уменьшить пробки просто организовав движение, а именно — убрав минимальное количество водителей, которые не могут (или не хотят) ездить как все.
А я написал, что просто штрафами и карами типа отъёма ВУ эта ситуация никак не исправится. Есть множество способов, некоторые даже абсолютно легальные, которые позволяют всё равно остаться с правами и ездить как угодно. А насчёт частых остановок — есть субъективные мнения — часто-редко, а есть объективная статистика по количеству водителей, которые ездят без ОСАГО, аргументируя как раз тем, что пару штрафов в год по 800 рублей — это гораздо дешевле, чем покупать полную страховку. Разумеется, я резко осуждаю подобную практику, и считаю, что это может обойтись гораздо дороже в последствии, но отнюдь не из-за того, что «поймают»
PS Нижний Новгород — не самый малый город, хотя и не Москва, конечно.
mayorovp
01.02.2017 09:52Вот только общественный транспорт стоит в тех же самых пробках, что и личные автомобили (ну, кроме метро). И скорость движения автобуса всегда будет меньше чем у легковушки, сколько их не развивай.
Поэтому говорить что развитие общественного транспорта важнее "угнетения" автомобилистов — некорректно. Пробки уменьшат только одновременные действия по обоим направлениям, и то не сразу.
Areso
01.02.2017 12:00Для общественного транспорта важны выделенные полосы, а где возможно вынос за проезжую часть (трамваи).
Плюс сам транспорт должен быть надежным, предсказуемым, чистым, не переполненным, удобным…
oYASo
03.02.2017 04:16Есть еще один супер-супер важный момент — нет никакого желания со всеми этими людьми ехать в одном пространстве. Я еще к этому более-менее спокоен, но львиная доля моих друзей говорит, что лучше пешком, на велосипеде в мороз, каршеринге или такси, чем спускаться лишний раз в метро. И причин тут навалом: вонь, ходьба по ногам, воровство, порча вещей (сумки, куртки), угрюмые лица вокруг, священные войны на тему «не уступил место», давка и т.д. и т.п. Да, если нужно гарантированно приехать к определенному времени, лучше выбрать метро, но если никуда не спешишь — можно и в пробки постоять, песни попеть, книги почитать.
dimm_ddr
03.02.2017 10:25Если общественный транспорт станет более адекватным, популярным и получит социальное одобрение, то этот момент перестанет быть «супер-супер важным». Даже сейчас так говорят в основном люди из секты «метро для нищебродов». Не хочу никого обидеть, это мой личный опыт и он, естественно, не может быть обобщен на всех. Возможно еще, конечно, что питерское метро просто сильно лучше московского, но сравнить возможность мне пока не представилась.

kefirfromperm
31.01.2017 08:13+1Пробки, конечно, будут. Если 2 полосы сливаются в одну, то скорость на них будет как минимум в два раза меньше, чем максимально допустимая на одной после слияния. И роботы как раз могут обеспечить максимальное приближение к 2м, а люди будут постоянно спорить и лезть вперед за счет чего замедляют обе полосы не в 2, а в несколько раз.
TalWar
31.01.2017 15:24Когда две полосы, люди еще справляются, но у нас, во время каких-нибудь ремонтов дорог, бывает три и более в одну. Вот тут я, кажется, ни разу не видел, чтобы корректно справлялись.
kefirfromperm
31.01.2017 19:04+1Ну вроде как принято через одну машину съезжаться, но это не оптимальная стратегия. Оптимальная — это когда сперва один ряд въезжает, потому второй. Ну и вариации: по 5 машин из ряда, по 10. Люди на такое не способны.
komjah
31.01.2017 21:11Для таких манипуляций есть регулировщики. Они хоть и редко но встречаются и тогда пробка действительно рассасывается довольно быстро.
intsurfer
31.01.2017 09:53-7Вся математика разобьется об банальные вещи — ни разу не видел обсуждения как робомобили будут ездить зимой. Когда дорогу надо чувствовать своим задним мостом, т.е. пятой точкой. Где гарантия, что в программах будут учтены все дорожные условия?

Akon32
31.01.2017 10:17+5Считаете, что разработчики роботов не знают, что такое зима? Это было бы странно.
В плане опыта роботы будут иметь преимущество — можно собирать данные с миллионов машин.
Решения при неожиданных событиях поначалу будут хуже, но и люди с этим не всегда успешно справляются.intsurfer
31.01.2017 10:51разработчики может и знают, но и я знаю людей и слышал от других, как их знакомых разворачивало на трассе (к счастью все обходилось только помятым железом), когда компьютер вдруг решал, что надо подключить задние колеса.
Ruckus
31.01.2017 10:59+1Нет сети и алгоритма обучения. Когда будут — это будут случаи из разряда фантастики. Хотя я за предсказуемость, пока, нежели за обучаемость. Пока на дорогах не станет роботов >> людей.

paratrooper5730
31.01.2017 14:06+2все почему-то сравнивают робота с водителем-шаманом, который n-цать лет за баранкой и чувствует пятой точкой три поворота дороги вперед. Наверное, им хочется видеть себя такими. Но таких водил на самом деле мало. А сравните робот с чайником, который права купил, но еще путает педали. Или с упоротым представителем золотой молодежи. Или с человеком, который просто давно не спал.

Crystal_HMR
31.01.2017 15:24+3Если уж уходить в теорию — то распределение датчиков давления в покрышках, амортизаторах + гироскоп — и компьютер сможет добавлять оборотов на каждую движущую ось отдельно, либо же притормаживать отдельной колодкой. Человек этого не сделает никогда. Во всяком случае среднестатистический водитель. Естественно, что гонщик формулы 1 — возможно сможет (можете почитать про устройство руля, BRKBAL, IGN, PREL и так далее). Но даже этот водитель — будет реагировать на опыте. А робот — действовать по алгоритму, имея не «показания пятой точки», а каждого из датчиков.
И именно поэтому я действительно верю в более безопасное движение в потоке AI автомобилей.intsurfer
01.02.2017 13:17-1продолжу свою роль критика :)
все готовы доверить свою жизнь производителям датчиков? Ни у кого не было, что какой-нибудь важный датчик ломался прямо во время движения? Можно, конечно, ввести дублирование, но это тоже не панацея.mayorovp
01.02.2017 13:30Ну, своим глазам люди свою жизнь же доверяют, а они еще менее надежны.
teifo
02.02.2017 08:34В том то и дело, возможно робот надежнее, но люди должны доверять роботу, чтобы купить машину с ним. Вдруг будет достаточно нескольких серьезных аварий и народ побоится покупать такие машины?

mev3101
31.01.2017 19:24Так задний мост при подключении и стабилизирует автомобиль. У меня как раз не получалось пустить машину в занос из-за этой фичи.

Deosis
31.01.2017 11:57-2Если бы программисты строили дома, то цивилизацию уничтожил бы первый залетевший дятел ©
Поэтому стоит поставить вопрос так: сколько робоавтомобилей встанет в пробку из-за выбежавшего на дорогу оленя?warranty_voider
31.01.2017 15:24+2Ноль. В этом видео как раз такой пример разбирается https://www.youtube.com/watch?v=iHzzSao6ypE
GlebGleb
31.01.2017 15:24Судя по разработчикам электромобилей — таки да, подавляющее большинство на этой планете слабо представляют, что такое настоящая зима.
В плане зимы пожалуй главное — не ИИ, а качество датчиков, дающих информацию для ИИ автомобиля. В том числе датчиков скользкой дороги и проскальзывания/сноса колёс. Увы, пока что именно с датчиками не всё хорошо на аппаратном уровне.
kefirfromperm
31.01.2017 10:24+10У роботов здесь очевидное преимущество. Если человек, каким-то загадочным способом должен «чувствовать своим задним мостом», то робот точно знает коэффициент сцепления с дорогой. Более того, имея инфракрасные камеры и камеры с поляризацией света, робот может видеть скользкие участки и лужи под снегом, что для человека невозможно.
rfvnhy
31.01.2017 14:48Еще как возможно. Если на лобовое стекло будет проекция идти.
Вот только цена такой системы будет сравнима с ценой автопилота…

QR-code
31.01.2017 15:24робот точно знает коэффициент сцепления с дорогой
Проблема в том, что робот его узнает постфактум, когда колесо уже заблокировалось/пробуксовывает. Человек же может ориентироваться на погодные условия и заранее принять меры к недопущению потери контроля.mayorovp
31.01.2017 15:50-1Не путайте текущую реализацию и потенциальные возможности.
QR-code
01.02.2017 11:26Ну вот когда «потенциальные возможности» будут реализованы «в железе», тогда о них и поговорим, а иначе получится гадание на кофейной гуще.
mayorovp
01.02.2017 11:42Ваше возражение было бы справедливым, если бы обсуждение не было с самого начала направлено в будущее.
QR-code
01.02.2017 11:51-1обсуждение не было с самого начала направлено в будущее.
Еще раз приведу цитату, на которую я отвечал:
робот точно знает коэффициент сцепления с дорогой
Где вы видите здесь будущее? Глагол «знает» подразумевает настоящее время.
kefirfromperm
31.01.2017 19:02+1Что мешает роботу ориентироваться на погодные условия?
QR-code
01.02.2017 11:31-1Например то, что он о них не знает. Как робот может узнать о количестве снега/воды на дороге? Или о том, что она покрыта льдом? Или не покрыта, т.к. ее обработали реагентами? Человеку же достаточно просто на нее посмотреть и он все это узнает.
kefirfromperm
02.02.2017 09:17+11. Роботам интернет отменили?
2. Инфракрасные камеры позволяют точно узнать температуру дороги и сделать вывод о её сухости на основе других данных, таких как температура воздуха и влажность.
3. Камеры с поляризацией света позволяют гораздо точнее определить участки покрыты слоем воды или льдом чем человеческий глаз. Причем здесь алгоритмов особых не надо. Если картинка в разных поляризациях отличается, значит дорога мокрая или покрыта коркой льда. В любом случае скользкая.
«Человеку же достаточно просто на нее посмотреть и он все это узнает.» Практика говорит об обратном. Сильный дождь, первый снег — аварии на всех дорогах.QR-code
02.02.2017 12:25-1Роботам интернет отменили?
В интернете есть данные о количестве снега/воды на дорогах. Или качестве работы дорожных служб?
узнать температуру дороги и сделать вывод о её сухости на основе других данных, таких как температура воздуха и влажность.
И какая тут зависимость? Только гололед можно предсказать таким образом, и то не всегда.
Если картинка в разных поляризациях отличается, значит дорога мокрая или покрыта коркой льда. В любом случае скользкая.
Коэффициент сцепления льда и мокрой дороги очень разный. В случае воды важно еще и ее количество. И опять же, я не спорю, что робота можно научить распознавать условия: поставить датчики на машину и дорогу, написать алгоритмы, начать взаимодействовать с синоптиками и дорожными службами и т.д. Но Вы говорили, что робот уже знает, как вести себя в сложных условиях, и именно с этим я не согласен.
Сильный дождь, первый снег — аварии на всех дорогах.
Просто среди людей есть идиоты, ездящие 200 км/ч в дождь и на летней резине в снегопад.dimm_ddr
02.02.2017 14:32Но Вы говорили, что робот уже знает, как вести себя в сложных условиях, и именно с этим я не согласен.
Что вы подразумеваете под «уже», если вас не устраивает принципиальная возможность всему этому робота научить? Мне кажется ваш оппонент нигде не утверждал что вот прямо сейчас роботы все это умеют и делают.QR-code
02.02.2017 14:43-1принципиальная возможность всему этому робота научить?
Вот когда научат, тогда и будет разговор о том, кто лучше справляется — человек или робот. А пока не научили — все разговоры о том, что можно сделать — всего лишь прогнозы, которые могут и не сбыться.
ваш оппонент нигде не утверждал что вот прямо сейчас роботы все это умеют и делают.
А это тогда что:
то робот точно знает коэффициент сцепления с дорогой
dimm_ddr
03.02.2017 10:35+1Вы так вцепились в этот кусок предложения, хотя его совершенно точно можно трактовать как «технические возможности уже сейчас позволяют роботу все это делать». Вполне обычная ситуация. Более того, вы же даже согласились что робота этому можно научить. Если я вас правильно понимаю, то все, что вы пытаетесь сказать: «Прямо сейчас по дороге не едет машина которая точно знает коэффициент сцепления с дорогой в любую погоду». Но с этим то никто не спорит же.
QR-code
03.02.2017 16:50-1Вы так вцепились в этот кусок предложения
Потому что я не согласен именно с этим куском. Словосочетание «робот знает» подразумевает настоящее время. А о технических возможностях было сказано во втором предложении, и с этим я, в общем-то, согласен.
Но с этим то никто не спорит же.
Почему же тогда в двух комментариях мне говорят про потенциальные возможности, а в третьем эти возможности перечисляются? И только в своем последнем комментарии вы уловили мою мысль.dimm_ddr
06.02.2017 10:29+1Потому что я до последнего комментария не верил что вы действительно настолько буквально восприняли эту фразу. Ваше право впрочем.
sets
31.01.2017 11:05+1Зимой роботы будут ездить примерно также как и люди. Качество сцепления с дорогой можно прикидывать автоматически, например, по соотношению крутящего момента и реального хода колеса. Дорожную разметку определять аналогично людям — по памяти и колеям.
Текущие роботы на зиму вроде не рассчитаны вообще никак, между Bay Area и LA не так много снега, а потом подтянутся.Areso
31.01.2017 11:53В Мичигане, где разрешили робомобили, зима вроде самая настоящая, со снегом, льдом, метелями, вот этим всем. Разве что не такая суровая, как где-нибудь в Сибири.
rfvnhy
31.01.2017 14:53+1Вопрос как там чистят дороги…
У нас например нормальная ситуация что снег на второстепенной дороге просто сдвинули в сторону и минус в лучшем случае пол-полосы.
Дальше — разметки не видно от слова СОВСЕМ.
На центральных улицах вдоль тротуаров от 20см «буфера» из льда по высоте минимум сравнимой с высотой бордюра.
Вместе с тем автопилоту скоро возможно будет не обязательна разметка, она будет храниться в памяти (загружаемые карты + GPS + распознавание зданий/столбов/поворотов/перекрестков… для более точного позиционирования) плюс точные измерения ширины полосы датчиками, возможно в полотно дороги начнут закладывать шины для позиционирования авто через датчики…

jakobz
31.01.2017 11:21+3ESP уже во всех новых машинах есть. Это робот, который чуствует дорогу датчиками вращения колес, положения руля, и угловой скорости. И, как показывают все эксперименты, умеет не допускать занос лучше человека, даже не трогая руль.
aso
31.01.2017 14:46ESP уже во всех новых машинах есть. Это робот
И как оно будет вести себя без Break Assist?
А то устранение заноса сопровождаемое увеличением дины тормозного пути — далеко не всегда обеспечивает рост безопасности.mayorovp
31.01.2017 15:13При чем тут вообще длина тормозного пути? За удлинение тормозного пути ABS "отвечает", а не ESP. Механизм действия ESP заключается в торможении одного из задних колес — что никак не может тормозной путь удлинить.
aso
01.02.2017 14:03И как давно это — совершенно разные, независимые системы?
mayorovp
01.02.2017 14:25С самого появления это — совершенно разные, функционально независимые системы с различными условиями срабатывания и методами воздействия.
Если вы хотели сказать про то, что конструктивно они зависимы — то это делать реализации, которая не должна никого беспокоить пока система работает как задумано.
dmitryi_k
31.01.2017 15:24+3Почему все так орут что в автопилоте не будут учтены все условия и прочее, и людей это реально парит, а то что «Ашот» в соседнем ряду который одной рукой курит, а второй залипает в свой смарфтон, с правами которые он купил не так давно, и получил практический опыт руления только от точки до точки б, ездит по дорогам, беспокоит людей не так сильно
teifo
02.02.2017 08:36Наверное потому, что про страх полетов слышно чаще, чем про машины. Возможно доверять своим рукам и глазам проще, чем непонятной штуке внутри машины.

ClearAirTurbulence
31.01.2017 12:06Удачные демо того, как должны двигаться робомобили — в фильме Minority report и вот тут (с оговорками).

kolemik
31.01.2017 13:08+2основное преимущество робомобиля — одинаковость поведения и (потенциально) осведомлённость о поведении соседей. Отсюда:
- не надо закладывать увеличенную дистанцию — полная остановка в потоке будет происходить гораздо реже, объезд точечных препятствий будет происходить тоже гораздо спокойнее в режиме «туннелирования»
- перестроения выполняются заранее. Да, затруднённый съезд будет блокировать полосу, но только одну
- торможение потока перед пробкой (сильно заранее) и разгон после неё (как только становится возможным) — у человека (москвича) строго обратная реакция
- безопасный обгон по встречной полосе — соседи по потоку подскажут, есть ли кто за поворотом

lxsmkv
31.01.2017 14:06+1зацепился за слово «обгон». Мне кажется что обгон может присходить только в одном случае, если это экстренные службы. Все остальные робомобили двигаются со скоростью потока. Полоса для грузового транспорта и две полосы для легкового причем левая полоса не быстрее средней. Если водитель любой машины может «потребовать» от машины двигаться быстрее чем рассчитаное компьютером оптимальное значение, то человеческий фактор как всегда все испортит.
Akon32
31.01.2017 14:12Все остальные робомобили двигаются со скоростью потока.
Не обязательно. Расход топлива на очень высоких скоростях больше, поэтому пользователь может выбирать, быстрее или дешевле ехать. У разных машин может быть разная оптимальная скорость.
kolemik
31.01.2017 14:15да, на автоттрассах вполне возможно квантование по скоростям. Типа при выезде выбираешь режим «экономный/обычный/максималка»
kolemik
31.01.2017 14:14+4мы же про реальный мир говорим. а в реальном мире, например, есть ТС разных габаритов. Кто-то может входить в поворот на 90, а двухэтажный автобус сбросит до 50. Опять же фуре незачем ехать даже 90-100 — оптимальный расход бензина там на меньших скоростях, а при наличии роботизации — останавливаться она будет только на заправках и двигаться 24/7.
Так что ТС будут двигаться с различной скоростью. Естественно, скорость эта, будет ограничена жёстко сверху (для безопасности пешеходов и водителей-натуралов) и любые её изменения будут известны соседям по потоку.
Да, возможно, что появятся услуги типа «продвижение в потоке», когда поток будет подтормаживать (скажем, из-за затора), но 1-2 машины можно будет пропустить чуть вперёд по спец-полосе. И понятно, что это будут не только скорые/пожарные. Но, опять же, напомню про реальный мир. Роботизация — это одно, а социальные преобразования общества — совсем другое.
teifo
31.01.2017 22:48А как роботы уменьшат дистанцию и тормозной путь? То есть мы снижаем уровень безопасности в надежде, что все всегда идет по правилам? В данном случае я не говорю о наплевательском отношении к дистанции живых водителей. Но отдавая управление роботу, как-то странно снижать и уровень безопасности.
degs
31.01.2017 22:59Потенциально у роботов мгновенная реакция и абсолютный глазомер. Я думаю что сейчас все алгоритмы находятся в стадии отработки и многократно перестраховываются, если это так то в будущем неизбежна многократная оптимизация без ущерба для безопасности. Это если еще не учитывать взаимодействия между робомобилями — например информация что пятая машина впереди от меня через 0.25 секунды начнет притормаживать на 10км/ч.
teifo
01.02.2017 10:54-1Они так же мгновенно могут остановить автомобиль, и у него не будет тормозного пути? То, что робот может выиграть пару секунд, это понятно, и вместо 20 метров при 60 км в час станет 0 метров у робота?
HangGlider
31.01.2017 13:47+3Не покидает ощущение, что написанное относится к «пробке в вакууме» и является продуктом мысли представителя автоконцерна :)
Сокращение времени поездки за счет использования функций робомобиля, приведет к росту привлекательности такого вида транспорта. Это означает, что в некоторый момент, часть автовладельцев выберут авто в качестве транспорта и станут автомобилепользователями. Т.о. количество машин находящихся одновременно на дорогах вырастет.
Число автомобилепользователей будет расти до того момента, пока алгоритмы не дают сбои из-за ограничений инфраструктуры. С увеличением времени поездки, некоторая доля автомобилепользователей перейдет в автовладельцы. Алгоритмы снова начнут справляться.
По официальным данным на дорогах Нерезиновой одновременно находится 500-700 тыс автомобилей. Безпробочный режим возможен при 300-400 тыс. Зарегистрированно 3,8 млн авто, не считая Области.
Даже если списать две трети, отложенный спрос все равно будет в несколько раз выше.
ainoneko
04.02.2017 21:16-2Это означает, что в некоторый момент, часть автовладельцев выберут авто в качестве транспорта и станут автомобилепользователями. Т.о. количество машин находящихся одновременно на дорогах вырастет.
Это как? Они одновременно поедут и с роботом, и на своей машине?
yukon39
31.01.2017 13:52И, как это часто бывает, пробка рассосалась сама по себе — не было впереди ни аварии, ни ремонта, просто машины в какой-то момент начали двигаться быстрее, еще быстрее, и все — свободная дорога впереди.
Вполне обычная ситуация. Основная причина довольно простая — машина (и поток) останавливается гораздо быстрее, чем разгоняется. Поэтому пробка быстро разрастается до километровых размеров, а затем очень долго может рассасываться. Наиболее непонятно это выглядит для последних участников — внезапная остановка посреди трассы, стоянка полминуты и затем пустая трасса до горизонта.
jakobz
31.01.2017 14:02Интересно, а как все-таки правильнее вести себя в пробке, чтобы она рассосалась? Суда по всему, прижиматься к машине спереди — не выгодная стратегия. А так ведь делают большинство. Скорее правильнее стараться оставлять побольше места спереди, и двигаться равномерно.
Есть такие исследования? Ведь если людям популярно объяснить что надо делать — может быть уже сейчас можно сделать жизнь получше.kolemik
31.01.2017 14:20выгодная стратегия — тормозить сильно заранее перед затором и ускоряться после.
без робоведения решается настройкой светофоров. поэтому самые жёсткие пробки на безсфетофорных магистралях — никто не может затормозить поток и затор продолжает неконтролируемый рост, а отстоявшие час в пробке не могут быстро перестроиться и безопасно разогнаться для ускорения рассасывания затора.teifo
31.01.2017 22:49Хммм, а вдруг уберут транспортную нейтральность, и теперь кто платит больше или чей груз ценнее или еще по какому критерию будет получать преимущество по скорости?:)
degs
31.01.2017 23:10А разве это плохо? Например скорая не будет беспомощно гудеть в заторе а расчистит себе дорогу еще за несколько сотен метров. Конечно
козлыс мигалками немедленно начнут этим пользоваться вовсю, но тут математика бессильна. Пост все-таки о математике, а не о социальной справедливости.teifo
01.02.2017 10:56Про спец.службы вопросов нет, а вот еще большая демонстрация социального неравенства конечно будет содействовать миру и благополучию:)
immaculate
31.01.2017 19:43Если оставлять побольше места, то в него начнут перестраиваться торопыги из соседних рядов. Неважно, что все ряды двигаются с одинаковой скоростью, многие просто не могут стоять спокойно и постоянно переезжают из ряда в ряд даже в совсем стоячей пробке.
dimm_ddr
31.01.2017 14:36А с ними все просто, поскольку я не делал никаких человеко-специфических предположений, базовая модель верна и для них.
Но ведь сделали же, вот:
Однако скорость испарения заведомо меньше скорости торможения; главным образом потому что водитель тормозит сразу же как только заметит стоп-сигналы впереди идущего, а для разгона ему нужно оценивать расстояние до впереди идущей машины и ее скорость.
Очевидно что автоматическая система оценит нужные скорости значительно быстрее и этим временем можно пренебречь. Правда тут вступает в игру то, что автомобиль в принципе умеет тормозить быстрее чем разгоняться, но тут уже надо брать реальные цифры и считать насколько это в реальности заметно. С учетом того, что робомобили пока что в основном в проектах и таких реальных данных по ним нет — посчитать невозможно. А если я правильно понял пост, то, убрав этот момент мы, вообще-то, уберем и пробки.
Таким образом без реальных данных по возможности разгона/остановки робомобиля (или как минимум по режимам разгона/торможения в предпробочных условиях) сказать будут ли пробки с робомобилями нельзя. Можно сказать только что пробки будут пока будет достаточно много живых водителей.degs
31.01.2017 15:22Я исходил из того что робот сейчас оценивает расстояние и скорость так же как человек, визуально. Тогда ему тоже потребуется время чтобы исключить случайные флуктуации. Значит он тоже будет разгоняться медленнее чем он же мог бы затормозить, хотя и быстрее человека.
dimm_ddr
01.02.2017 12:19Естественно потребуется. Но я утверждаю что это время для робота настолько мало, что его можно не учитывать. Более того, при увеличении количества робомобилей на дорогах увеличивается шанс что перед робомобилем окажется тоже робомобиль, для которого не нужно ничего считать — он сам все скажет. Таким образом остается только вопрос насколько физически долго тормозить, а насколько разгоняться.
rfvnhy
31.01.2017 14:58>В частности, если позволить им обмениваться информацией на дороге, можно создать виртуальный распределенный ИИ управляющий движением на каждом участке
А что если для городов пойти немного дальше?
Единый диспетчерский центр.
Который будет рулить потоком.
Ведь начальный и конечный пункты известны, зачастую известны еще и примерное время поездки заранее.
Вполне можно рассчитать % 75 от потока заранее.
Плюс авто будет «видеть» участников движения «за углом» и получая команды от единого центра будет двигаться с оптимальной скоростью.
Ну и к моменту введения достаточно глобально таких систем не будет разной крейсерской скорости как писали выше. Ведь 90% авто в городе переведут на электричество… А для электродвигателей крейсерская скорость не так сильно будет отличаться как для ДВС.

Ogi
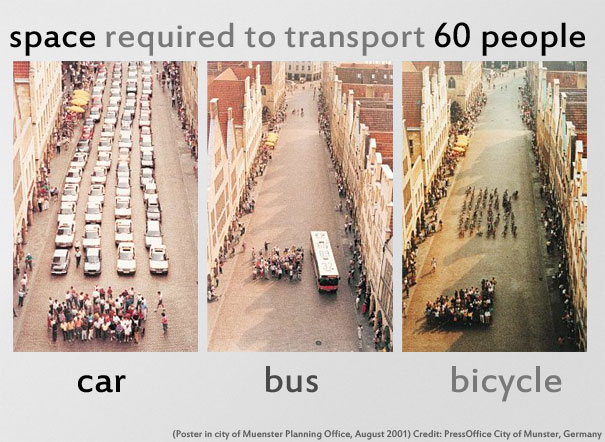
31.01.2017 15:13+1Почему-то люди отказываются понять, в чём на самом деле состоит причина пробок. Причина в том, что легковой автомобиль — ужасно неэффективное средство передвижения. Никакой автопилот этого не изменит: сама идея использовать огромную железную коробку для перемещения одной человеческой тушки ущербна.
immaculate
31.01.2017 19:52+4Все мы понимаем. Просто жизнь — это сложная штука, в которой многие хотят делать иррациональные вещи, просто потому что без них жизнь становится пресной. Кто-то курит, хотя большинство курильщиков понимают, что это вредно. Кто-то, как я, ездит на мотоцикле, хотя статистически это опаснее, чем ездить на авто. Кто-то ездит на авто, хотя это менее экономичный и более медленный вид транспорта, чем электричка и метро.
Если организовывать жизнь людей максимально рационально, то получится что-то близкое к СССР — в СССР многие не любили отсутствие свободы выбора как жить. Это наверное не совсем корректная аналогия, просто сейчас затрудняюсь подобрать аналогию лучше.
Можно заставить всех ездить на автобусах и метро, есть стандартный полезный набор продуктов: скажем, на завтрак овсянку с яблоком, в обед борщ, котлету с гречкой, компот, на ужин — еще что-то. Всем выдать одинаковую практичную одежду. Решится множество проблем с пробками, загрязнением окружающей среды.
Но все люди любят разные вещи, большинство будет против такой жизни. Мало кто, поездив на хорошем авто, пересядет на автобус. Мало кто, поездив на хорошем мотоцикле и получив удовольствие от передвижения на двух колесах, может забыть это ощущение полета. Мало кто может день изо дня носить одну и ту же одежду.
А главное — зачем? Кто сказал, что жизнь должна быть максимально рациональной? И как вообще определить эту рациональность?
mayorovp
01.02.2017 10:41Дело не в рациональности ради рациональности — а в том, что места для всех объективно не хватает.
Areso
01.02.2017 12:04Просто у ОТ мало преимуществ. И вместо того, чтобы создавать доп. преимущества ОТ (для этого нужны деньги), создают недостатки автолюбителям (а это уже приносит деньги).
immaculate
01.02.2017 12:22ОТ все равно не заменит автомобиль, какие бы ни были преимущества. Тем более, ОТ не заменит мотоцикл, потому что тот же мотоцикл дает еще ощутимое удовольствие от вождения, это не просто перенестись из точки А в точку Б.
Насчет создания неудобств автолюбителям — ну, это и есть один способ уменьшить количество автолюбителей и пробок. Я не знаю, какой способ самый правильный. Но этот наверняка один из самых эффективных. И вряд ли на самом деле в данный момент существует более оптимальный способ решения проблемы пробок.
mrrouter
31.01.2017 23:01Как хорошо, что не только я это понимаю. Тоже собирался разместить эту картинку. Слава трамваю!

andersong
31.01.2017 15:23Ну и наконец, разгонное время можно кардинально уменьшить если машина получает сигнал об ускорении от впереди идущей, это позволило бы резко сократить время жизни солитона и предотвратить лавинный эффект.
А что, если к стоп-сигналам добавить газ-сигналы?
RomanStrlcpy
31.01.2017 16:12+1Тут имеется ввиду, что в данном случае поток как бы начнет движение одновременно, независимо от того находится ли авто перед стоп линией или в самом хвосте. Что то вроде конвейера. Поэтому газ-сигнал не поможет, т.к. время реакции водителя-человека не так уж и высоко, по сравнению со скоростью распространения электрических сигналов.
GlebGleb
31.01.2017 16:22Дело не в эффективности транспортных средств как таковых. Разные транспортные средства хороши для разных задач. Пешеход займёт раз в 5 меньше места, чем велосипед. Но эффективность пешехода как «транспортного средства» в большинстве случаев слаба.
Дело в первую очередь в большой концентрации людей в одном месте (внутри МКАД например). Если дороги держать загруженными на 2/3, не более (как и HDD на Вашем компьютере), то и проблем не будет. А для этого в первую очередь нужно более-менее равномерное развитие экономики по территории.
Yeskelay
31.01.2017 15:23Роботы непременно будут стоять в пробках. По крайней мере в начале их распространения, даже если роботов будет на дороге 50-70%.
1. Из-за изложенных в статье причин
2. На дороге будут присутствовать роботы разных производителей с разными характеристиками. Разные модели не обязательно будут взаимодействовать по одному протоколу.
Модуль взаимодействия может отказать и тогда на первый план выходят допустимые с точки зрения разработчика расстояния до впереди едущей машины и время реакции робота на окружающую обстановку.
Время реакции и растояние до впереди идущей машины разные у разных производителей. То есть в любом случае даже при 100% роботизации автотранспорта мы будем иметь дело с вероятностной моделью.
3. Зачастую профиль дороги и обстоятельства таковы, что нельзя рассчитать и предусмотреть все ньюансы. Многие водители вынуждены ехать на интуиции. То есть на авось. Робот в таких обстоятельствах должен либо остановиться, либо ехать, допуская при этом, так же как и живой водитель, что всё просчитать нельзя. И тогда мы снова будем получать не нулевую вероятность аварии.mayorovp
31.01.2017 16:01-1В видео "The Simple solution to traffic", которые привели в комментариях выше, дается неплохой "протокол", который не требует никакого продвинутого взаимодействия: нужно держать дистанции до переднего и заднего "соседей" одинаковыми. На первое время этого хватит.
dimm_ddr
01.02.2017 12:26+1Фишка в том, что человек крайне плохо умеет оценивать вероятности. А вот робот их оценивает настолько хорошо, насколько точные у него формулы и сколько у него ресурсов. И сделать реализацию просто лучше человеческой — элементарно. И да, естественно будут аварии и пробки. Вопрос лишь в количестве.
Azoh
02.02.2017 12:12На счет единой системы взаимодействия задумываются уже. Более вероятна ситуация "модели для разных стран/регионов не могут использоваться в других странах/регионах". Регуляторы, скажем, в России примут один стандарт, в Европе же будет другой, а в Штатах третий. Возможно, в автопилот будут зашиты все возможные варианты, но тут уже нужно полагаться на добросовестность производителей. А им разделение на регионы выгодно.

Dr_Wut
02.02.2017 01:30ОТ действительно единственный адекватный способ решения транспортной проблемы. Но вот мне, например, пришлось купит машину когда появились дети. Ну не готов я их таскать к врачам в ОТ. Или куда то с ними ехать… Хотя до этого не покупал машину из принципа.
С другой стороны робомашины могут уменьшить количество автомобилей. К примеру в семье есть 2 машины, для мужа и жены.
Муж ездит с утра на работу, жена днем за продуктами. Так вот робомашина могла бы уезжать домой и возить жену. Или к примеру развозить с работы дополнительно 2-3 человек живущих неподалеку от владельца.
И еще одно нереально огромное преимущество робомашин — соблюдение правил. Это практически единственный источник пробок, повороты не с того ряда, наглое влезание, проезд на красный…
mwambanatanga