Недавно мы рассказывали об отечественных боевых роботах, и сегодня хотим несколько расширить эту тему и вспомнить ярких представителей советской робототехники.
Тем, кто родом из СССР, не нужно объяснять, кто изображён на заглавной картинке. По сути, робот Вертер во второй половине 1980-х олицетворял для всей страны не только будущее, но и вообще всю робототехнику. Какова же была ситуация с роботами в Советском Союзе?
Сразу хотим уточнить: под роботами в этой статье подразумеваются не самоходные устройства, а гораздо более широкий спектр автоматических устройств, «предназначенных для осуществления производственных и других операций, действующих по заранее заложенной программе и получающих информацию о внешнем мире от датчиков. При этом робот может как иметь связь с оператором (получать от него команды), так и действовать автономно».
Как мы уже рассказывали, в первую очередь эксперименты с роботизацией в СССР начались в армии, когда перед войной было создано несколько лёгких танков с дистанционным управлением (ТТ-26 и ТУ-26). Кстати, перед войной на территории Карельского укрепрайона проводились эксперименты с автоматическим открытием огня из пулемётов при срабатывании инфракрасных фотодатчиков (в тёмное время суток и в условиях задымления). Правда это, пожалуй, относится скорее к автоматизации, чем к роботизации.

А потом стало не до хайтека.
После войны одним из главных направлений в развитии высоких технологий стала космонавтика. Кроме того, армия нуждалась в качественно новых образцах вооружений. Поэтому в 1951 в МГТУ им. Баумана была открыта кафедра СМ-7 «Специальная робототехника и мехатроника». В стране активно развивается теория вычислительных машин и автоматизации программирования, создаётся элементная база, вводятся в эксплуатацию ЭВМ, не уступающие лучшим мировым образцам (МЭСМ, Сетунь, АВМ МН-10, СВМ 5Э89 Курс, Днепр), создаются новые коллективы учёных и инженеров для создания робототехники.
Космические роботы
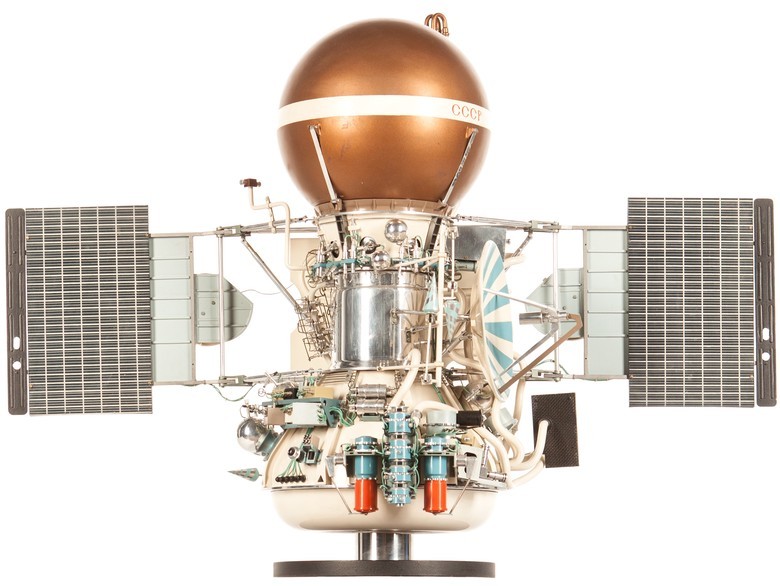
В 1959 году СССР запустил первую в мире автоматическую межпланетную станцию «Луна-1». В 1961-м запущена автоматическая станция «Венера-1», правда, до Венеры не долетела. Зато это удалось сделать через пять лет «Венере-3». А в 1975-м впервые удалось ретранслировать данные с поверхности планеты: спускаемые модули автоматических станций «Венера-9» и «Венера-10» отправляли информацию на орбитальные модули, а те передавали её на Землю.
В 1963-м на вышеупомянутой кафедре СМ-7 в Бауманке был разработан первый в мире внешний космический манипулятор.
В 1970-м СССР взял новый рубеж: автоматическая станция «Луна-16» доставила с Луны образцы грунта. А через два месяца мы открыли эпоху использования планетоходов.
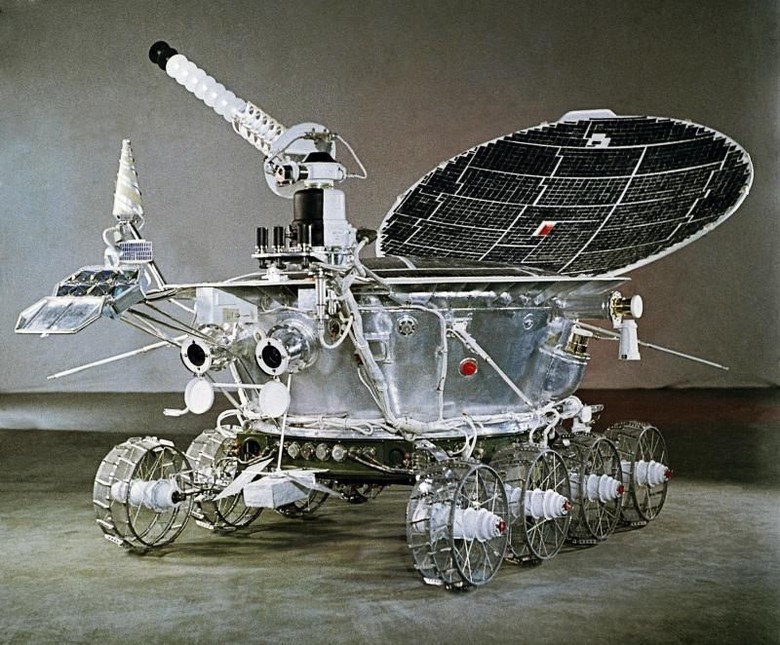
К слову, это должно было произойти почти на два года раньше, но ракета с первым «Луноходом» разрушилась в воздухе вскоре после старта. Зато в 1973-м на Луну прибыл «Луноход-2», который в сумме прошёл 42 километра — больше, чем его предшественник.
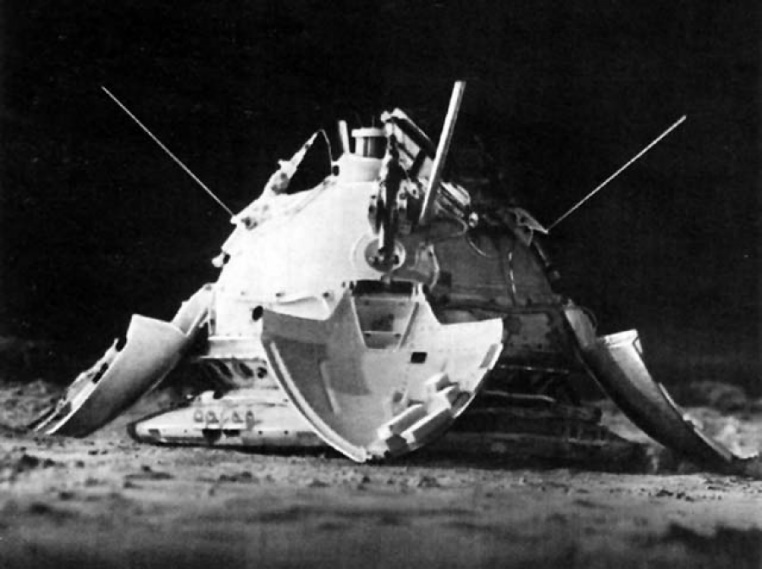
В 1971-м советская робототехника совершила новый прорыв — автоматическая межпланетная станция «Марс-3» совершила первую в мире мягкую посадку на Марс.
Увы, но на этом наши достижения в изучении Красной планеты закончились. Хотя тогда ещё никто не мог знать, что последующие проекты отправки исследовательских аппаратов на Марс потерпят неудачу по самым разным причинам. В 1977-м был создан экспериментальный макет марсохода, интегральный полноприводный робот «Кентавр», предназначенный для отработки алгоритмов автономной системы управления движением, проверки математических и инженерных расчётов.
Одним из шедевров отечественной робототехники стали система навигации и управления для космического комплекса «Энергия-Буран»: весь полёт, от взлёта до посадки, выполнялся полностью в автоматическом режиме. Это стало уникальным событием в мировой космонавтике! В атмосферу «Буран» вошёл на скорости около 30 000 км/ч, идеально приземлился на скорости 300 км/ч в условиях сильного бокового ветра, при этом опередил расчётное время приземления всего на одну секунду. Одну секунду, Карл! А отклонение от центральной оси посадочной полосы — всего 1,5 м.
БПЛА
В 1961-м году был создан первый в СССР реактивный сверхзвуковой разведывательный беспилотник Ту-123, имевший максимальную скорость 2700 км/час. Беспилотник двигался по заложенной программе маршрута, фотосъёмка выполнялась автоматически, при подлёте к месту посадки автоматически включалась система радиопривода на аэродром.

В 1970-м появился Ту-143, предназначенный для ведения фото-, теле- и радиационной разведки в прифронтовой полосе. Крейсерская скорость — 950 км/час, дальность действия — 180 км.

В 1974 полетел и беспилотник оперативно-тактического уровня Ту-141. Максимальная скорость — 1000 км/час, дальность действия — 1000 км.

«Чернобыльские»
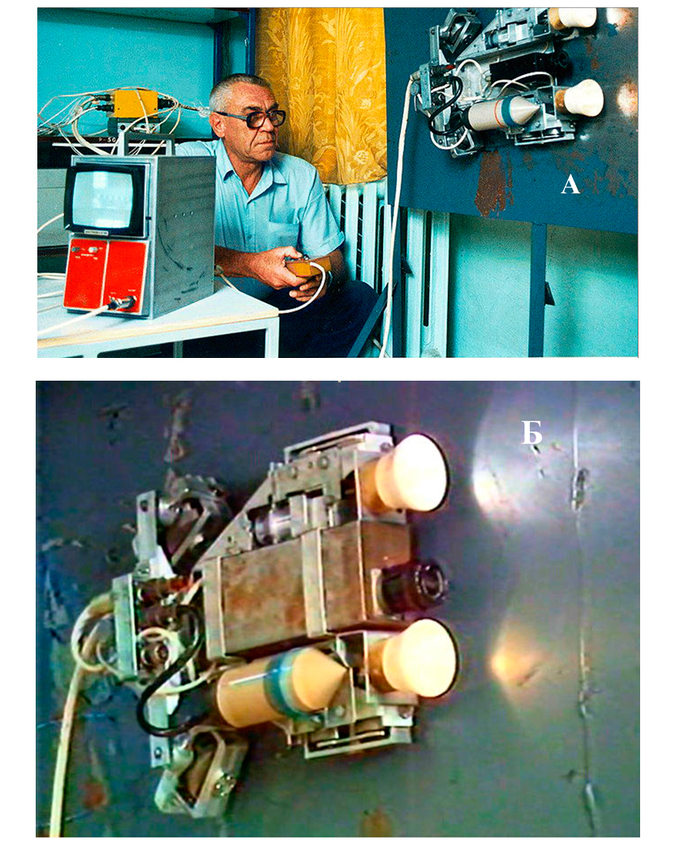
В 1986-м для ликвидации последствий взрыва на Чернобыльской АЭС началась срочная разработка всевозможных роботов. В первую очередь они нужны были для разведки в помещениях и на крыше реакторного блока, а также для расчистки мусора, фонившего безумным количеством рентген.
Немало жизней и здоровья сохранили разработанные в МГТУ им. Баумана роботы «Мобот-Ч-ХВ» и «Мобот-Ч-ХВ2».

Для тех же целей был срочно разработан робот СТР-1 (специальный транспортный робот). Его вес — 1100 кг, максимальная скорость движения — 1 км/ч, питание — серебряно-цинковые аккумуляторы.

После окончания работ на крыше реакторного блока, СТР-1, как и многая другая техника, был перемещён на площадку хранения — из-за дикого уровня радиации к нему было опасно подходить ближе нескольких метров.

Впрочем, на территории ЧАЭС действовали и другие роботы, в том числе разведывательные машинки сверхлёгкого класса:
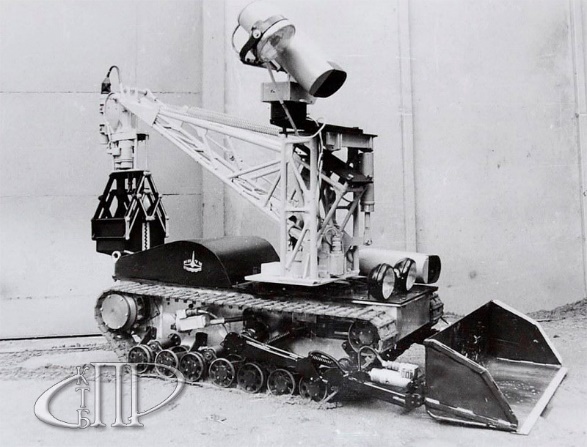
Робот-бульдозер, сгребавший радиоактивный мусор:

Маленькие роботы ДУСА (Дистанционно-Управляемые Самоходные Агрегаты) применялись для снижения запылённости в помещениях, разведки, сбора проб, расчистки. Преимущество этих малышей заключалось в их размерах — они могли проехать там, где застревали более крупные роботы.
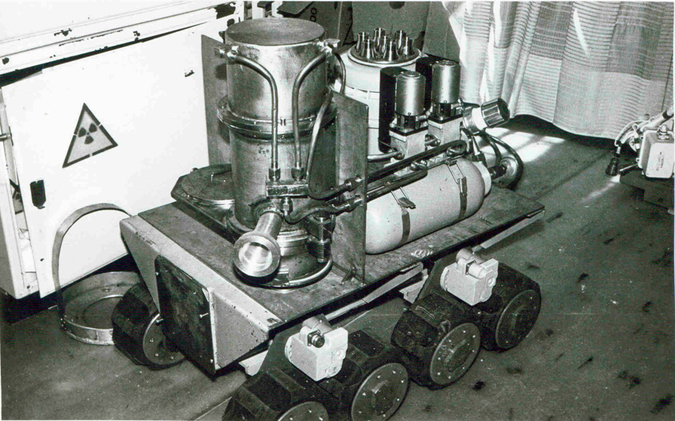
Робот для фильтрации воздуха.
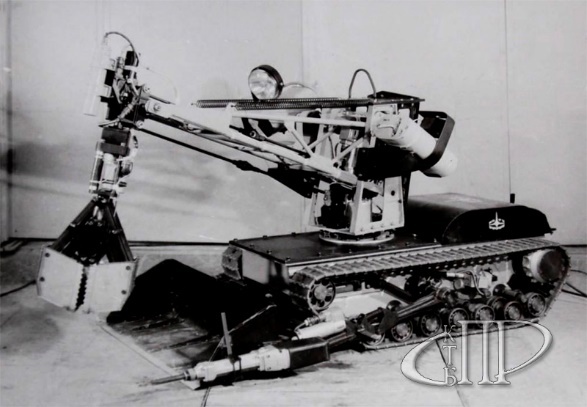
Робот ТР-4 с буровой установкой для сбора проб.


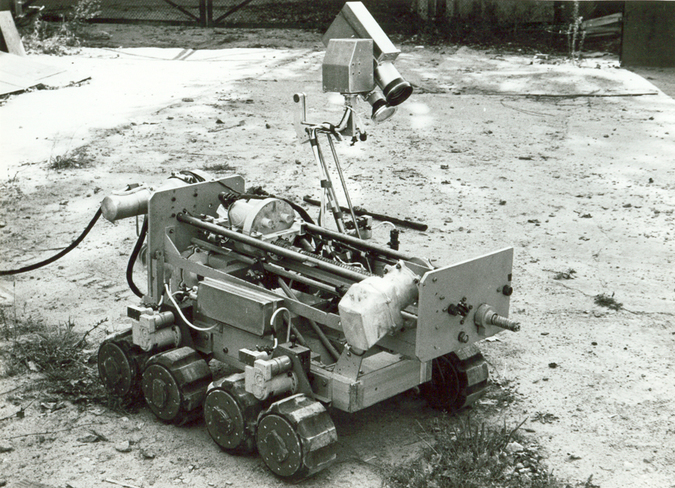
Робот-разведчик. Обратите внимание на дополнительный прожектор подсветки позади камерного модуля.
Робот-магнитоход, умевший передвигаться по металлическим поверхностям благодаря мощным редкоземельным магнитам.
Промышленные роботы
Достижения в космической и военной технике — это прекрасно, но всё же основой является мирный созидательный труд. В 1966-м появился первый советский промышленный робот-манипулятор, разработанный в воронежском институте ЭНИКмаш. С 1972 начал выпускаться первый советский роботы с числовым программным управлением УМ-1.
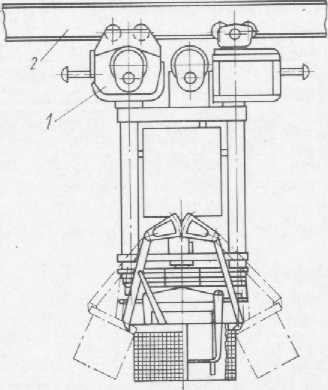
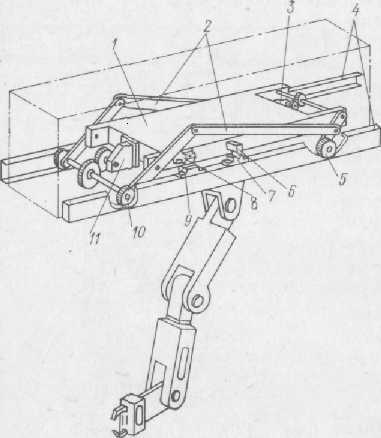
В 1973-м были созданы первые в СССР подвижные промышленные роботы:
- транспортный робот «Спрут-1», перемещавшийся по монорельсовой направляющей:
- и робот-манипулятор МП-1, представлявший собой механическую «руку» на тележке:
В 1970-х Петродворцовый часовой завод первым в мире переходит на роботизированную линию сборки часовых механизмов — так называемая постовая схема. Это позволило в 1980-х довести объём производства до 4,5 млн часов в год.
К началу 1980-х в СССР было разработано несколько десятков моделей промышленных роботов, которые тысячами трудились на самых разных предприятиях огромной страны. На момент развала СССР у нас было разработано свыше 200 моделей промышленных роботов.
И в завершение нашей подборки, новинка отечественной — российской — робототехники: андроид Фёдор:
Будущее близко.

Комментарии (19)

Ugrum
27.04.2017 15:31+2Сегодня ты тычешь в Фёдора палкой и заставляешь его отжиматься.
Завтра Вертер целится в тебя из дробовика.
Картинки в правильной хронологии расставлены.

frees2
27.04.2017 16:29Будущее моботов, когда часть логики, и чем больше тем лучше, обрабатывается самим роботом а не оператором.
Одна из причин, почему повсеместно не используют военные. Пропал сигнал, оператор сделал ошибку и так далее.
Пример успешности дрон, который умеет на большой скорости и с высокой точностью огибать препятствия, предварительно их обнаружив.
Zenitchik
27.04.2017 19:45на большой скорости и с высокой точностью огибать препятствия, предварительно их обнаружив.
Огибание рельефа у автопилота давно получается лучше, чем у человека.

svitoglad
27.04.2017 16:32На одном из форумов читал что в каком-то советском БПЛА стоял пневмокомпьютер.
vvmk
27.04.2017 16:58+1Пневмокомпьютер, говорите?
— Заведение мадам Пневмо, — начал Каллингем, — это фешенебельный дом удовольствий. Его владельцами, управляющими и сотрудниками являются роботы. Видишь ли, около пятидесяти лет назад существовал один сумасшедший робот по имени Гарри Черник, по крайней мере, я так думаю, что Черник был роботом. Им овладела мечта — создать роботов, внешне не отличающихся от человека, вплоть до мельчайших подробностей.
«Серебряные яйцеглавы» (англ. The Silver Eggheads) — сатирический фантастический роман Фрица Лейбера

ChiefPilot
27.04.2017 17:05Можно, пожалуйста, ещё раз вот про этот кусок статьи: «К слову, это должно было произойти почти на два года раньше, но ракета с первым «Луноходом» разрушилась в воздухе вскоре после старта. Зато в 1973-м на Луну прибыл «Луноход-2»». Насколько я знаю, «Луноходов» у нас таки и было два и оба работали. Или в Вашей интерпретации «Луноход-2» это то, что мы все знаем, как первый «Луноход», а потом был ещё и «Луноход-3», который мы все знаем, как второй?

tmin10
27.04.2017 17:40Да и вроде бы разрушений при старте в лунной программе с 1963 года не было…
ChiefPilot
27.04.2017 17:43+1На самом деле разрушение таки было, но в статье это как-то всё непонятно написано. А вот как про это пишет Википедия (и так гораздо понятнее!):
Луноход-0 — автоматический луноход, который должен был стать первым. На Луну не прибыл вследствие неудачного старта ракеты-носителя с аппаратом Е-8 № 201 19 февраля 1969 года. Причина аварии — разрушение аэродинамического обтекателя РН;
Луноход-1 — первый автоматический луноход, благополучно доставленный на Луну и выполнивший на Луне поставленную задачу. Доставлен на Луну 17 ноября 1970 года советским лунным кораблём-автоматом Луна-17 (Е-8 № 203), стартовавшим 10 ноября 1970 года;
Луноход-2 — второй автоматический луноход. Доставлен на поверхность Луны 16 января 1973 года советским лунным кораблём-автоматом Луна-21 (Е-8 № 204), стартовавшим 11 января 1973 года;
Луноход-3 — третий автоматический луноход. Должен был быть доставлен на поверхность Луны в 1977 году советским лунным кораблём-автоматом Луна-25 (запуск не состоялся). В настоящее время действующий экземпляр находится в музее НПО имени С. А. Лавочкина.tmin10
27.04.2017 17:45Хм, я посмотрел в вики таблицу программы Луна и не увидел там этого запуска, видимо там только успешные пуски.

Neuromantix
27.04.2017 17:23Интересно было бы узнать принцип работы магнитного робота — каким образом он «отмагничивался» и перемещался.
AllegroMod
28.04.2017 01:23Поскольку магниты очень быстро теряют притяжение при появлении зазоров с поверхностью, я не думаю, что он «отмагничивался». Возможно, магниты были, например, на гусеницах.
rPman
28.04.2017 02:58магнит обеспечивает прижим, удержание на стене — трением
вместо магнита еще используют воздушный — прижим вентилятором или вакуумный компрессор для ровной поверхности (для стекла например)
HerrDirektor
Федор неплохо выглядит. Это полноценная система с обратной связью или просто куча заданных алгоритмов для конкретной демонстрации?
Eeegrek
Это грусть и печаль! Погуглите «робот Рогозина»
slovak
Не все так грустно. На первых кадрах вполне себе обратная связь. Но соглашусь — чрезмерный пиар = дурной пиар. Мне немного обидно за инженеров. Как обычно раздутые обещания натягиваются на ранние наработки.
ClearAirTurbulence
Скорее всего, телеуправление без ОС + демо-алгоритмы. Учитывая, что его активно пиарит Рогозин, закрадываются смутные сомнения в его перспективах.
От вышеприведённого параграфа настолько веет победными реляциями к «N-нному юбилею», а формулировки столь откровенно рассчитаны на потребление аудиторией ОРТ\Вестей\НТВ, что ну совершенно не верится, что оно может работать.
gs8io0
Хотите сказать инженерная школа уже не та? Мол, куда современных бакалаврам, магистрам и прочим колдунам до дипломированного инженера времен СССР? Намекаете, что основной навык сегодняшнего молодого специалиста, приобретенный им за пять лет учебы — нытье и разбрасывание кала в комментах?
… пожалуй, я с вами соглашусь