ПНЯ* — Периферия Независимая от Ядра в микроконтроллерах Microchip, известная так же как CIP — Core Independent Peripheral.
Микроконтроллеры в импульсных источниках питания
Часть 1
Забегая вперед хотелось бы отметить, что цель данной статьи не состоит в обсуждении преимуществ или недостатков способов управления, а так же в рекомендациях по выбору оптимальных топологий построения Импульсных Источников Питания (ИИП) и расчету элементов схемы – для этого есть тонны специализированной литературы.
Цель статьи – показать принципиальную возможность реализации большинства топологий ИИП на универсальной периферии микроконтроллеров Microchip, продемонстрировать преимущества микроконтроллерных решений по гибкости и универсальности относительно специализированных «аналоговых» ШИМ-контроллеров и ASIC для ИИП.
Ниже будем рассматривать решения на основе микроконтроллеров, но «цифровыми» источниками такие решения назвать нельзя, так как петля обратной связи все-же замкнута через аналоговые блоки и параметры ШИМ сигнала формируются аппаратной петлей обратной связи, а не рассчитываются ядром процессора. Для полностью цифровых решений Microchip выпускает специализированные 16-и разрядные цифровые сигнальные контроллеры (семейства dsPIC33 GS- серий) [1].
Из чего же сделан ИИП?
Сердцем импульсного источника питания служит ШИМ-контроллер. Структурная схема одного из вариантов специализированного ШИМ-контроллера приведена на рис.1.
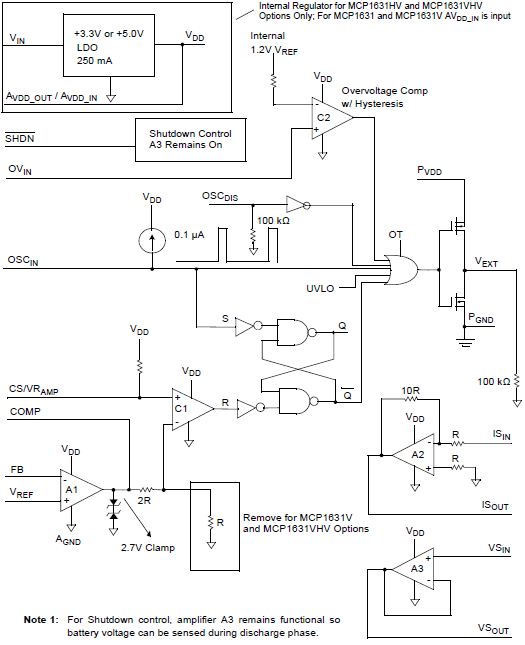
Рис.1. Структура специализированной микросхемы драйвера преобразователя питания.
Основным элементом схемы является SR-триггер, который управляет выходным каскадом включения силового ключа.
Триггер запускается по тактовым синхросигналам (вход S, Set). Сбросом (вход R, Reset) управляют сигналы компаратора C1, опорный сигнал для которого формируется операционным усилителем сигнала ошибки А1. Выход триггера управляет выходными ключами, управление которыми может быть заблокировано сигналами перенапряжения (компаратор C2), бланкирования и др.
При необходимости управления такой или подобной схемой извне (изменение и измерение параметров, мягкий старт, и пр.), нужно использовать внешние управляющие решения, например микроконтроллер или управляющую логику.
Итого, для построения управляемого интеллектуального источника питания нам нужно иметь микросхему ШИМ-контроллера и микроконтроллер, или же можно совместить – на базе микроконтроллера сделать ШИМ-контроллер преобразователя энергии.
Топологии ИИП
Топология это подключение индуктивности, конденсатора, переключающих элементов схемы для обеспечения преобразования энергии, соотношения входных и выходных параметров.
| схема | описание |
|---|---|
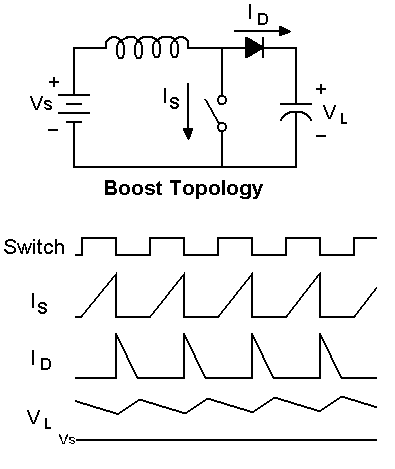 |
повышающий |
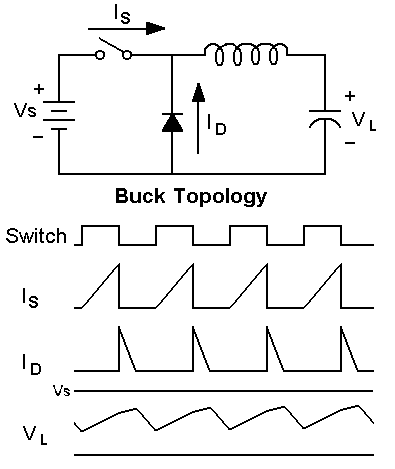 |
понижающий |
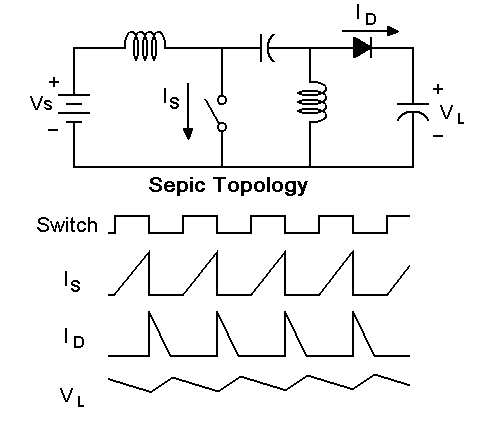 |
Sepic |
Рис. 2 Основные топологии ИИП.
Принцип управления силовым ключом в наиболее часто используемых топологиях ИИП в общем-то одинаковый (см. рис 2). Регулируется скважность открытия силового ключа, т.е. соотношение между состояниями «открыт» и «закрыт». Управление скважностью осуществляется либо в зависимости от выходного напряжения (управление по напряжению, voltage-mode control), либо в зависимости от тока в силовой индуктивности (управление по току, current-mode control).
В каждом из двух режимов управление может быть гистерезисное (Hysteretic Control) или пропорциональное (Proportional Control). При гистерезисном управлении скважность импульсов фиксирована, а регулировка выходного напряжения осуществляется включением или отключением подачи импульсов управления силового ключа.
При пропорциональном управлении скважность изменяется пропорционально величине рассогласования между фактическим выходным напряжением и требуемым.
Для распространенных топологий ИИП промышленностью выпускаются специализированные ШИМ-контроллеры. Но что делать, если под нужную топологию не существует готового ШИМ-контроллера? В этом случае на помощь так же может прийти микроконтроллер с конфигурируемой периферией.
Микроконтроллеры с ПНЯ
Рассмотрим состав периферии 8-и битных микроконтроллеров Microchip, предназначенных для построения преобразователей энергии.
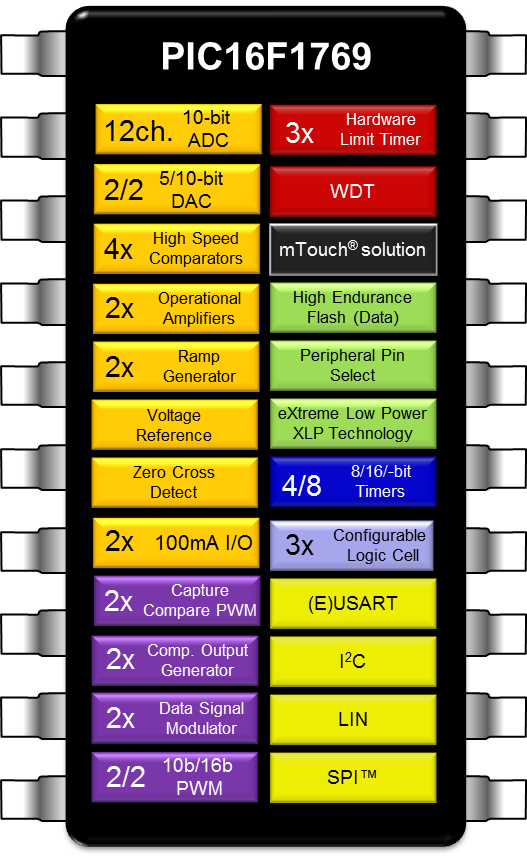
Рис. 3. Периферия контроллеров серии PIC16F1769
Контроллеры серии PIC16F176x (см. рис.3) имеют набор периферийных модулей достаточных для реализации многоканальных ШИМ контроллеров импульсного источника питания:
- быстрые компараторы;
- операционные усилители;
- формирователь комплементарных сигналов (COG);
- программируемый формирователь пилообразного напряжения (PRG);
- источник опорного напряжения;
- ЦАП;
- АЦП;
- детектор перехода через ноль (ZCD);
- таймеры с функцией сброса и ограничения, ШИМ;
- модулятор сигналов;
- Конфигурируемые Логические Ячейки (CLC);
- датчик температуры.
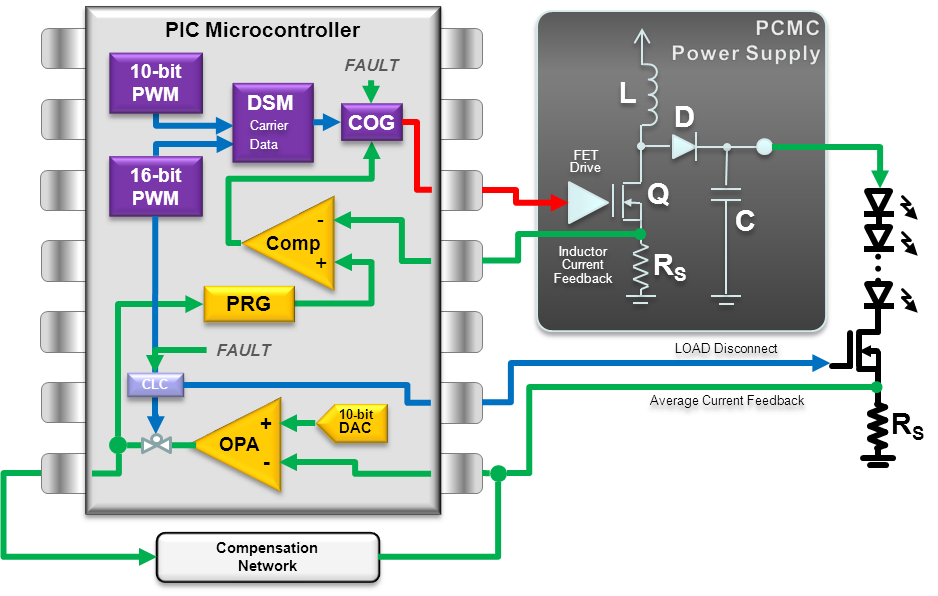
Периферийные модули могут соединяться внутри микроконтроллера для выполнения определенных функций. Например, рис.4 иллюстрирует конфигурирование периферии для выполнения функции преобразователя энергии. Причем подобное конфигурированные взаимосвязи периферийных модулей не требуют вмешательства ядра в процессе работы устройства.
Рис. 4. Повышающий преобразователь питания светодиодов со стабилизацией тока и диммирования.
Таким образом, на одной микросхеме/микроконтроллере мы можем реализовать ядро импульсного источника питания и управляющую логику (программу), тем самым мы получаем возможность исключить из схемы специализированный драйвер преобразователя питания.
Рассмотрим подробнее различные режимы работы ШИМ-контроллеров и возможность реализации их на периферии микроконтроллеров Microchip.
Управление по напряжению (Voltage Mode)
В этом режиме скважность ШИМ сигнала, управляющего силовыми ключами, определяется непосредственно выходным напряжением.
При гистерезисном управлении, если напряжение на выходе ниже нормы – идет «накачка» источника. Если напряжение на выходе больше порога – компаратор блокирует управление силовым ключом, идет разряд выходной накопительной емкости. В англоязычной литературе такой режим называют «hiccup-mode» – «режим с икотой».
Данный режим используется сравнительно редко, так как сопровождается большими пульсациями выходного напряжения и требует накопительного конденсатора сравнительно высокой емкости.
Рисунок 5 демонстрирует принцип работы режима управления по напряжению с гистерезисным управлением. Здесь и далее не показана выходная часть источника, так как определяется топологией, выходной мощностью и др. Для иллюстрации принципа работы ШИМ-контроллера иногда будет показан пример с выходной частью.

Рис. 5а. Первая схема – с фиксированным выходным напряжением, вторая – с регулировкой выходного напряжения.
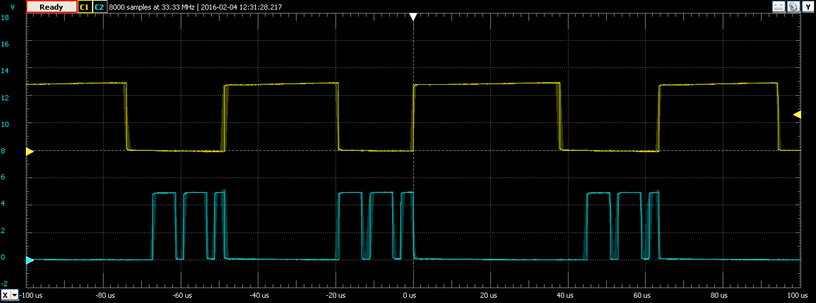
Рис. 5б. Диаграммы выхода ШИМ и выхода компаратора.
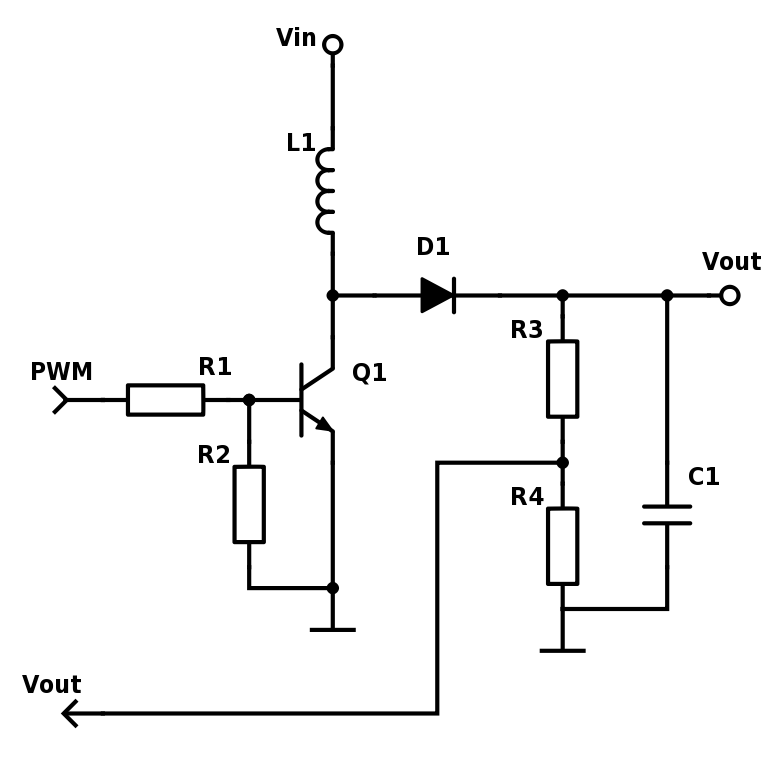
Рис. 6. Пример выходного каскада повышающего импульсного источника питания, подключенного к ШИМ контроллеру (см.рис.5).
Конфигурируемые логические ячейки (CLC) на рис .5 можно включить как элемент И. Для предотвращения высокочастотной генерации от компаратора его выход целесообразно пропустить через еще одну CLC – D-триггер с синхронизацией от сигнала ШИМ. В этом случае получим два «бонуса» — отсутствие возникновения высокочастотной генерации и неизменность скважности управляющего ШИМ (см. пояснения на рис. 7). Подробнее о конфигурируемых логических ячейках см. в статье «Конфигурируемые логические ячейки в PIC микроконтроллерах» [2].

Рис.7.а. Укорочение управляющих ШИМ импульсов, возможность появления высокочастотной генерации
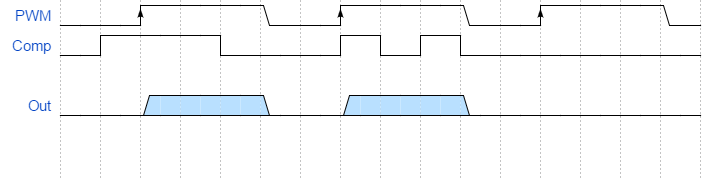
Рис. 7.б. Синхронизация сигналов позволяет предотвратить укорочение ШИМ импульсов
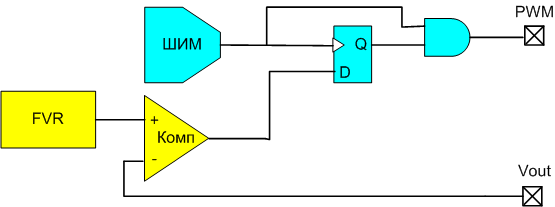
Рис. 8. Синхронизация сигналов для предотвращения генерации и укорочения ШИМ.
Управление по напряжению с пропорциональным управлением
При управлении по напряжению с пропорциональным управлением рассогласование выходного напряжения должно вносить поправку в скважность управляющих импульсов. Пропорцию между величиной рассогласования и величиной коррекции скважности обеспечивает усилитель ошибки и фильтр петли регулирования. Управление по напряжению с пропорциональным управлением используется сравнительно редко, так как при этом методе управления индуктивность может входить в насыщение при запуске источника и при коротком замыкании на выходе, требуется петлевой фильтр второго порядка и есть влияние входного напряжения на коэффициент усиления усилителя ошибки.
Управление по напряжению с пропорциональным управлением можно реализовать на встроенной периферии PIC контроллеров с помощью ШИМ модулятора – необходим генератор пилы (Ramp генератор) и компаратор (реализацию ШИМ модуляторов мы уже рассматривали в [2]). Генерируемый микроконтроллером опорный ШИМ служит для формирования пилообразного напряжения и определяет частоту управляющих импульсов, а напряжение обратной связи определяет скважность управляющих импульсов.
Для предотвращения насыщения индуктивности при запуске источника или при коротком замыкании на выходе нужно ограничить скважность управляющего сигнала. Для этого выходной сигнал компаратора (CMP1_out) подаем на CLC (элемент И), а на другой вход – опорный ШИМ формирования пилы (сигнал PWM рис. 10). Длительность импульса ШИМ будет служить ограничителем скважности управляющего сигнала DRV (ограничивать сигнал с выхода компаратора).
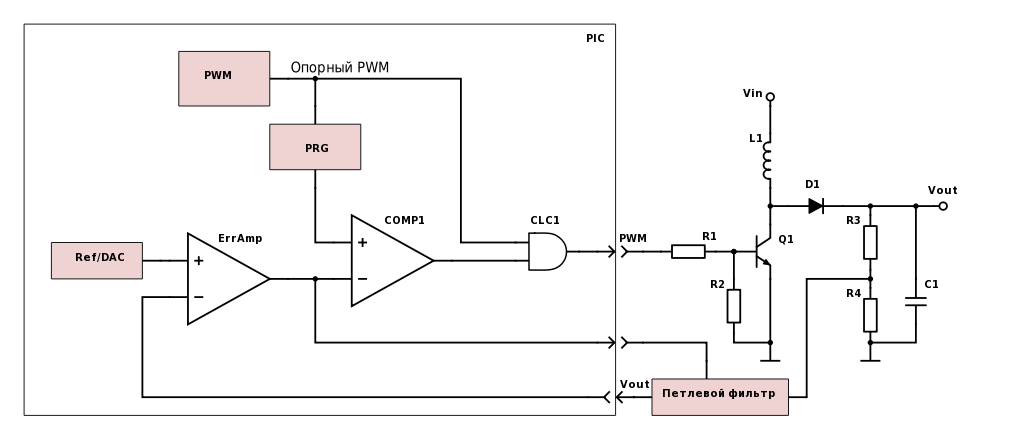
Рис.9 ШИМ-контроллер ИИП в режиме управления по напряжению с пропорциональным управлением.
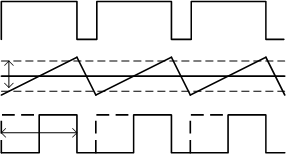
Рис.10. Диаграммы работы ШИМ контроллера с управлением по напряжению
Управление по току (Current Mode)
Данный метод устраняет недостаток режима управления по напряжению. В этом методе Контроллер получает вторую петлю обратной связи. Внутренний быстрый контур служит для контроля тока силового ключа (индуктивности) на каждом цикле его включения. При подаче сигнала на открытие силового ключа, ток через индуктивность, а значит и через силовой ключ, начинает линейно расти. При достижении порога силовой ключ размыкается, начинается отдача энергии индуктивности через диод. По времени или по детектированию нулевого тока в индуктивности (в режиме непрерывного тока или критической проводимости, CCrM) цикл повторяется.
Так как силовой ключ размыкается при достижении пикового тока, то обеспечивается постоянство накопленной энергии в индуктивности вне зависимости от входного напряжения (изменение входного напряжения влияет на скорость заряда). Второй контур петли регулирования контролирует выходное напряжение.
Управление по току с гистерезисным управлением: аналогично методу управления по напряжению – осуществляется Вкл/Выкл ШИМ управления силового ключа в зависимости от напряжения на выходе.

Рис.11а. ШИМ контроллер с управлением по току с гистерезисным управлением. Isence – контроль пика тока Is через индуктивность, Vout – проверка выходного напряжения, блокирование управляющего ШИМ при превышении выходного напряжения. Вариант с фиксированным выходным напряжением и с регулировкой выходного напряжения.
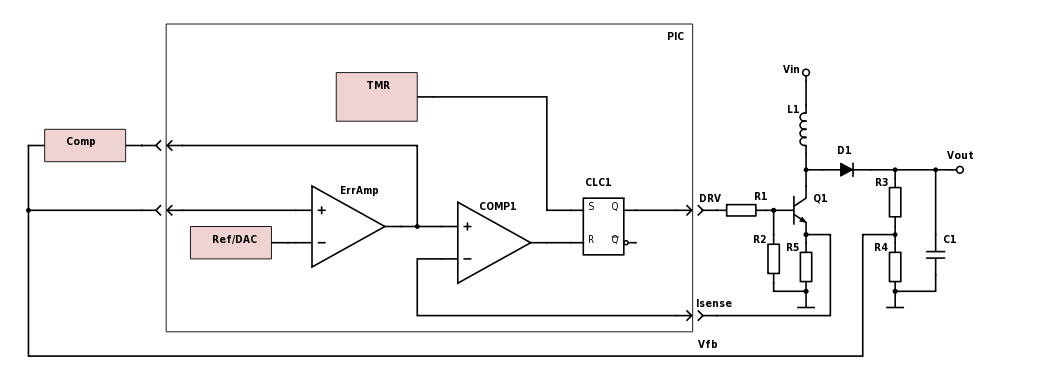
Рис. 11б. ШИМ контроллер и вариант выходной топологии для повышающего преобразователя с контролем пикового тока.
Управление по току с пропорциональным управлением
При этом способе управления переменная скважность ШИМ зависит от выходного напряжения и активного фильтра обратной связи.
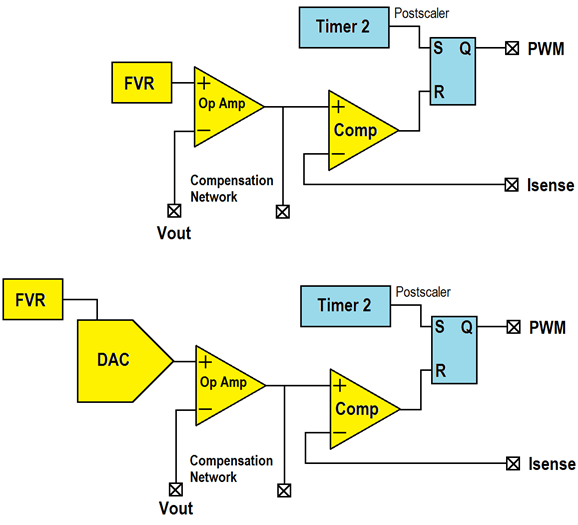
Рис. 12. ШИМ контроллер с управлением по току с пропорциональным управлением. Вариант с фиксированным и с регулируемым выходным напряжением.
В данном методе наблюдается нестабильность петли обратной при скважности выше 50% (появление генерации на частоте ? Fswx, зависит от шума на Vin или Vout). Данный процесс хорошо изучен и проблема решается уменьшением усиления в петле обратной связи, что можно обеспечить двумя способами (рис.13):
- добавлением пилообразного напряжения к Isense;
- вычитанием пилообразного напряжения из выхода петлевого фильтра.
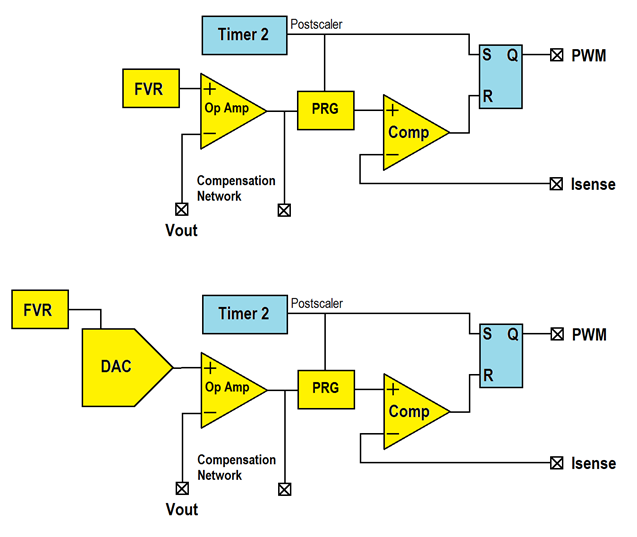
Рис.13. Добавление модуля формирования пилообразного напряжения (PRG) в ШИМ контроллер для устранения нестабильности петли обратной связи. Вариант с фиксированным и с регулируемым выходным напряжением.
Контроллеры Microchip для преобразователей энергии, как составную часть CIP имеют программируемый генератор пилообразного напряжения (Programmable Ramp Generator, PRG или Slope Compensation).
Модуль PRG позволяет формировать пилообразное напряжение с независимой регулировкой фронта и спада, в качестве запускающих сигналов могут использоваться различные внутренние и внешние сигналы.
Продолжение следует...
Далее:
Синхронный преобразователь
Генератор комплементарных сигналов
Многофазное чередующееся (интерливд) ШИМ управление
Автоматизация функций
Программа контроллера
Отладка
Комментарии (7)

drizzlleon
14.07.2017 16:35Спасибо!
А конкуренты есть по направлению? И чем лучше/хуже решение от микрочипа (особенно по управлению освещением)?..ariz0na
14.07.2017 16:58«по простому» — можно формировать ШИМ от таймера (задается частота и скважность). Это есть у всех МК (не только Microchip). Для ИИП нужно (в идеале) на каждом импульсе измерять параметры выхода и к следующему импульсу иметь расчет по скважности. В этом случае нужно иметь быстрый АЦП, быстрое ядро. Например dsPIC33 семейства GS имеют DSP ядро и ШИМ с разрешением 1.04нс (частота для таймера ШИМ 960МГц). Поэтому для источников «среднего» уровня, предлагаемое решение выглядит весьма интересным (ИМХО), так как параметры ШИМ задаются не таймером, а формируется обратной связью, петлевой фильтр не вычисляется ЦОС, а отрабатывается аналоговым петлевым фильтром.
С другой стороны, если источник нужен без доп.функций, то подойдет масса специализированных ШИМ-контроллеров, ASIC и пр., и это будет дешевле. Но если нужен сервис, как то: интерфейсы управления (DALI), диагностика, работа с датчиками и пр, то «зачем платить дважды?», когда на одном МК можно сделать ШИМ контроллер под нужную топологию и контроль с управлением.
Т.е. я бы сказал так, что решение «хуже» (относительно ASIC) тем, что чуть дороже. А «лучше» — если нужна гибкость, универсальность, управляемость, коммуникабельность, программируемость.
Конкуренты… смотря как сравнивать. подобным образом, через подобие CIP/ПНЯ и быстрые компараторы, — есть у Atmel, но он теперь тоже Microchip ))drizzlleon
14.07.2017 17:19«по простому» — можно формировать ШИМ от таймера (задается частота и скважность). Это есть у всех МК (не только Microchip). Для ИИП нужно (в идеале) на каждом импульсе измерять параметры выхода и к следующему импульсу иметь расчет по скважности. В этом случае нужно иметь быстрый АЦП, быстрое ядро. Например dsPIC33 семейства GS имеют DSP ядро и ШИМ с разрешением 1.04нс (частота для таймера ШИМ 960МГц). Поэтому для источников «среднего» уровня, предлагаемое решение выглядит весьма интересным (ИМХО), так как параметры ШИМ задаются не таймером, а формируется обратной связью, петлевой фильтр не вычисляется ЦОС, а отрабатывается аналоговым петлевым фильтром.
Проще отдать это контроллеру с внешним диммингом.
С другой стороны, если источник нужен без доп.функций, то подойдет масса специализированных ШИМ-контроллеров, ASIC и пр., и это будет дешевле. Но если нужен сервис, как то: интерфейсы управления (DALI), диагностика, работа с датчиками и пр, то «зачем платить дважды?», когда на одном МК можно сделать ШИМ контроллер под нужную топологию и контроль с управлением.
Т.е. я бы сказал так, что решение «хуже» (относительно ASIC) тем, что чуть дороже. А «лучше» — если нужна гибкость, универсальность, управляемость, коммуникабельность, программируемость.
Конкуренты… смотря как сравнивать. подобным образом, через подобие CIP/ПНЯ и быстрые компараторы, — есть у Atmel, но он теперь тоже Microchip ))
А тут согласен, тем более когда места мало… но кипресс уже подсуетился… причем лет 5ть назад и сделал решение со встроеными ключиками на несколько каналов. Цена правда совсем не радует.
RenameMe
17.07.2017 18:55Если сделать на описнном выше Микрочипе, то аналоговая «петля регулирования» создается простым конфигрурированием той самой независимой переферии (в графическом редакторе). Если разработчик свое время ценит, то сразу поймет разницу во времени разработки по сравнению с написанием кода для ШИМ регулирования на таймере. Кроме того количество ошибок (и выроятность «спалить» прототип) меньше при использовании ПНЯ по сравнению с разработкой кода для цифрового регулирования на таймере.
Цифровые источники (драйверы светодиодов) не обязательно связаны с интерфейсами, в них можно предусмотреть «умную» защиту, компенсацию и калибровку параметров, датчики, различные топологию. Конфигурацию переферии можно даже находу менять.
Самое главное, что схему вашу будет сложно скопировать, так как прошивка внутри микрокнтроллера может быть закрыта, а аналоговые решения достаточно просто копируются.
Noliki
Круто! Я на 4 CLC, двух транзисторах и трансформаторе от сетевухи делал когда-то давно изолированный RS-232.
sim2q
а какой транс, от десятки поди?
на 100 и уж на 1000 они уже какие то замароченные слишком
Noliki
от сотки