Не так давно я озаботился вопросом, как бы сделать привод для систем ЧПУ на коллекторном двигателе, да еще и с обратной связью, и что бы работал по Modbus RTU.
В распоряжении у меня имелись, Arduino UNO, Драйвер на L298N, коллекторный двигатель от привода сиденья автомобиля марки AEG на 12В, щелевой фотопрерыватель 2 шт.
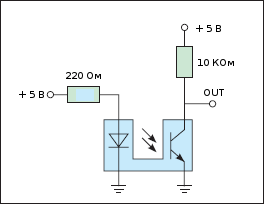
С начала я спаял платку с 2-мя фотопрерывателями, вот по такой схеме.
В готовом виде это всё выглядит так:

Суть данной некрасивой вещи — спичка пересекает с начала первый прерыватель, потом второй, так микроконтроллер понимает в какую сторону вращается мотор.
Все соединения выглядят так:
d2 — первый фотопрерыватель;
d3 — второй фотопрерыватель;
d5 — выход шим для вращения влево;
d6 — выход шим для вращения вправо;
Всё было соединено и я засел за написание кода, в итоги муки мои родили следующее:
А теперь дело за частью на компьютере. Что бы это все двигать была выбрана SinplLight SCADA, парни дают её самодельщикам бесплатно. Итак — вот так выглядят настройки в скаде.



Интерфейс был сделан такой:

В итоге получили подчинение двигателя ползунку в скаде, разгоняется и тормозит двигатель плавно, если вручную прокручивать якорь мотора, он не дает этого делать, и возвращается назад. Спасибо за внимание. И вот общий вид на беспорядок.

В распоряжении у меня имелись, Arduino UNO, Драйвер на L298N, коллекторный двигатель от привода сиденья автомобиля марки AEG на 12В, щелевой фотопрерыватель 2 шт.
С начала я спаял платку с 2-мя фотопрерывателями, вот по такой схеме.
В готовом виде это всё выглядит так:
Суть данной некрасивой вещи — спичка пересекает с начала первый прерыватель, потом второй, так микроконтроллер понимает в какую сторону вращается мотор.
Все соединения выглядят так:
d2 — первый фотопрерыватель;
d3 — второй фотопрерыватель;
d5 — выход шим для вращения влево;
d6 — выход шим для вращения вправо;
Всё было соединено и я засел за написание кода, в итоги муки мои родили следующее:
#include <ModbusRtu.h>
#define ID 1
//Задаём ведомому адрес, последовательный порт, выход управления TX
Modbus slave(ID, 0, 0);
int8_t state = 0; //состояние соединения
uint16_t au16data[11];// массив данных modbus
#include <PID_v1.h> //биилиотека и настройки ПИД регулятора
double Setpoint1, Input1, Output1;
double Setpoint2, Input2, Output2;
double Kp = 1, Ki = 2.5, Kd = 0.5;
PID myPID1(&Input1, &Output1, &Setpoint1, Kp, Ki, Kd, DIRECT); //1-й вращает в одну сторону
PID myPID2(&Input2, &Output2, &Setpoint2, Kp, Ki, Kd, REVERSE); //2-й вращает в другую
int LeftPWM = 5; //шим вращения в одну сторону
int RightPWM = 6; //шим вращения в другую сторону
volatile byte EncA, EncB = 0; //переменные для работы с прерываниями
volatile int Position = 0; //текущая позиция мотора
int SetPosition = 0; //в какую позицию поставить мотор
void setup()
{
slave.begin(9600);
pinMode (LeftPWM, OUTPUT);
pinMode (RightPWM, OUTPUT);
attachInterrupt(0, ChangePosition1, FALLING); // привязываем 0-е(pin2) прерывание к функции ChangePosition1()
attachInterrupt(1, ChangePosition2, FALLING); // привязываем 1-е(pin3) прерывание к функции ChangePosition2()
Setpoint1 = 0;
Setpoint2 = 0;
digitalWrite (LeftPWM, LOW);
digitalWrite (RightPWM, LOW);
}
//обработка прерывания 0
void ChangePosition1() //кто долго мучался с энкодером вот вам простой код для понимания!
{
EncA = 1;
if (EncA == 1 && EncB == 1)
{
EncA = 0;
EncB = 0;
Position++;
}
}
//обработка прерывания 1
void ChangePosition2()
{
EncB = 1;
if (EncA == 1 && EncB == 1)
{
EncA = 0;
EncB = 0;
Position--;
}
}
void loop()
{
//Работа с ModBus
// обработка сообщений
state = slave.poll(au16data, 11);
//Запись в регистры
au16data[2] = Position;//текущее положение
//Чтение из регистров
SetPosition = au16data[3];//установить положение
//Запись служебных регистров
au16data[8] = slave.getInCnt(); //входящих пакетов
au16data[9] = slave.getOutCnt(); //исходящих пакетов
au16data[10] = slave.getErrCnt();//ошибок
if (SetPosition == Position) //если нужная позиция равна текущей
{
myPID1.SetMode(MANUAL);
myPID2.SetMode(MANUAL);
Output1 = 0;
Output2 = 0;
digitalWrite (LeftPWM, LOW);
digitalWrite (RightPWM, LOW);
}
if (SetPosition < Position)
{
myPID2.SetMode(AUTOMATIC);
Setpoint2 = SetPosition;
Input2 = Position;
myPID2.Compute();
analogWrite (LeftPWM, Output2);
digitalWrite (RightPWM, LOW);
}
if (SetPosition > Position)
{
myPID1.SetMode(AUTOMATIC);
Setpoint1 = SetPosition;
Input1 = Position;
myPID1.Compute();
analogWrite (RightPWM, Output1);
digitalWrite (LeftPWM, LOW);
}
}А теперь дело за частью на компьютере. Что бы это все двигать была выбрана SinplLight SCADA, парни дают её самодельщикам бесплатно. Итак — вот так выглядят настройки в скаде.
Интерфейс был сделан такой:
В итоге получили подчинение двигателя ползунку в скаде, разгоняется и тормозит двигатель плавно, если вручную прокручивать якорь мотора, он не дает этого делать, и возвращается назад. Спасибо за внимание. И вот общий вид на беспорядок.
Комментарии (5)

sav13
19.03.2018 16:41Какой шаг вы сможете отследить на ходовом винте? 0.1мм 0.01мм меньше?
С какой скоростью можно двигать по оси?
При условии, что все остальное покупается — ходовой винт с гайкой, а лучше ШВП, подшипники и прочее, имеет ли смысл экономить на шаговике с драйвером?
alexhott
19.03.2018 18:39Если как написано выше вместо спички воткнуть диск энкодера, расстояние между фотодатчиками подобрать чтобы направление определялось, то сотки может и трудно будет ловить, но момент и скорость у такого движка в разы лучше чем у шаговика за ту же цену.
Если еще поколдовать то получится неплохая серва, а их цены уже стоят того чтобы поколдовать.

RusakovMxL
Только вместо спички нужно хотя бы колесико от старой мышки, а-то шаг в один оборот — как-то совсем худо. Но тут уже другая песня, как это совместить с двумя (примененными у вас) датчиками скорости вращения? И с «дребезгами» то еще шаманство. Так вот делаешь-делаешь, а потом с бубном танцуешь, проходит половина года и думаешь: «Блин, лучше бы шаговик заводской купил и уже всё бы работало давно» — по себе сужу — делал ось Z, варил что-то, люфты убирал, подгонял каретку от печатной машинки (в итоге купил оси, опоры и всё хламье на нее тысячи за 3 и всё как часы). Сколько времени потрачено на плохо работающую железяку. «Городить» имеет смысл только если штуковина либо не выпускается вообще, либо если она заоблачно дорогая. Время дороже (личное, свободное). Мое мнение.
ra3vld
Вроде, взято до редуктора, так что не 1 импульс на оборот, а 100-500.
Видео бы не помешало.