Эволюция – это путешествие. С одной стороны, это вроде бы простой механизм – особи, лучше приспособленные к окружающей среде, рожают больше детей, а меньше приспособленные не размножаются так сильно, и их гены отфильтровываются. С другой стороны, она смогла породить потрясающий набор организмов. Некоторые животные летают при помощи оперённых крыльев, другие при помощи мембран, растянутых между пальцами. Некоторые бегают на двух ногах, другие на четырёх. И все по-своему адаптировались к своему окружению.
Эволюция – штука мощная, и к этой силе за вдохновением сегодня обращаются специалисты по робототехнике. Новое концептуальное исследование австралийских учёных изучает вопрос того, как эволюционные алгоритмы могут порождать ноги для роботов, приспособленные для ходьбы по определённым поверхностям. Результаты получились одновременно логичными, контринтуитивными и странными – а также намекают на новый способ изготовления ходячих машин.
Исследователи начали с 20 случайных форм цифровых ног, ограниченных определённым размером (трёхметровые ноги из кошмаров нам не нужны). Каждая схема базируется на элементах, известных, как кривые Безье. «Кривую Безье можно увидеть в Microsoft Paint, где вы определяете кривую по нескольким контрольным точкам, только мы используем их в трёх измерениях», — говорит исследователь Дэвид Говард из Австралийской общественной организации научных и промышленных исследований. Система проецирует эти кривые на решётку из трёхмерных пикселей – вокселей. «В том месте, где кривая пересекается с вокселем, мы размещаем наш материал, — добавляет Говард. – Всё остальное остаётся пустым». В результате каждая схема становится уникальной.
Симуляция изучает приспособленность полученной ноги для ходьбы по трём разных поверхностям: твёрдой почве, гравию и по воде. Просто вместо выбора таких свойств, как хорошее зрение или камуфляж, как происходит при естественном отборе, система выбирает схемы по крутящему моменту, который пришлось бы развивать мотору, чтобы вращать ногу определённой длины при ходьбе по заданной поверхности. Иначе говоря, хорошая нога – энергетически эффективная нога. Также бонусы давали за ноги, требовавшие меньше материала.
«Для гравийной поверхности, по которой идёт нога, мы вычисляем силы, действующие на каждый камушек, — говорит Говард. – Это даёт нам очень точное представление на то, что нога делает в окружающей среде». То же происходит с водой и твёрдой почвой.
Затем исследователи взяли 20 изначальных ног и скомбинировали их с теми, что показали себя лучше всего. Выбрали наиболее приспособленные ноги для создания дочерних ног, немного похожих на родительские. «Мы просто делаем это снова и снова», — говорит Говард. В течение тысячи поколений. В результате половина популяции, показавшая наихудшие результаты, исчезла, как исчезают в природе животные под воздействием факторов окружающей среды. «А затем мы применяем автоматическую адаптацию к окружающей среде».

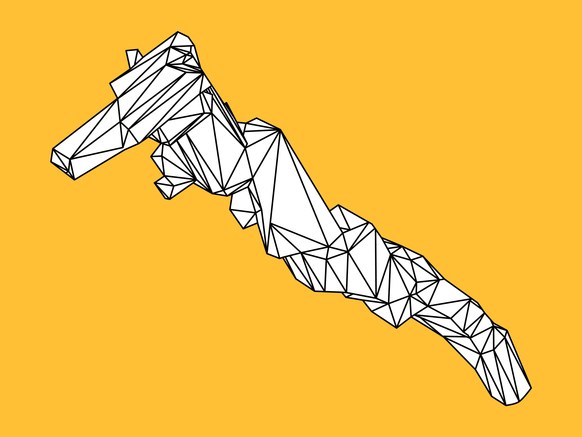
На изображении выше в первом ряду расположены ноги, которые алгоритм посчитал наиболее эффективными для ходьбы по твёрдой поверхности. Средний ряд предпочтителен для гравия, нижний – для воды.
Похожие на лезвия ноги – логичный выбор для ходьбы по твёрдой земле. Поскольку она твёрдая, узкие ноги не будут проваливаться. «Поэтому ноги для гравия получились потолще, им нужны более широкие следы», — сказал Говард. Они помогают ногам ходить по гравию, не проваливаясь, как снегоступы.
Толстые ноги, адаптированные для воды? Это пока загадка. «С водой получилось что-то странное, мы ожидали чего-то, похожего на лезвия, как для ходьбы по твёрдой поверхности», — сказал Говард. Это позволило бы им рассекать воду. Также можно было бы ожидать от системы более худых конечностей, учитывая все первоначальные задачи. «Но узких ног не получилось. Мы пока ещё не совсем уверены, почему».
Также довольно странными получились некоторые выступы, особенно на ногах, предназначенных для почвы. «Нам нравится теория, по которой у них есть своя цель, — говорит Говард. Но на самом деле при разметке кривой Безье на воксельную решётку, её часть, которая кажется бесполезной, на самом деле является частью гораздо большей кривой, обеспечивающей структуру внутри ноги». Выступы выглядят брутально, но на самом деле, они – всего лишь артефакты, не помогающие, но и не мешающие ногам. Говард с коллегами подстроили систему так, чтобы она их распознавала и удаляла автоматически.
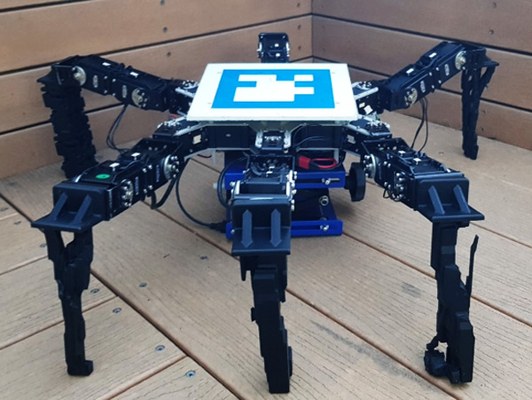
Исследователи распечатали такие ноги на 3D-принтере, и подсоединили их к шестиногому роботу. Теперь они планируют проверить их эффективность на реальной поверхности по сравнению с ногами, разработанными людьми. Команда уже загрузила в симулятор примеры таких ног, и получилось, что полученные в результате «эволюции» ноги выступают не хуже, а иногда и лучше искусственных.
Зачем же нужно тратить усилия на симуляцию эволюции роботов? Например, можно придать роботу узкую специализацию для перемещения по определённой поверхности, а не основываться на ногах широкого применения. Теоретически, это позволит роботу лучше справляться в определённых ситуациях, например, при преодолении песчаных дюн.
«Если вы хотите использовать робота в другом окружении, можно просто заново запустить алгоритм», — говорит Тоннес Нигаард, изучающий меняющих форму под влиянием эволюции роботов в Университете Осло, и не принимавший участия в этой работе. «Если вы разработали систему, специально предназначенную для определённой цели, то на поздних этапах проектирования это уже может оказаться невозможным».
Система Нигаарда, четырёхногий робот с телескопическими ногами, эволюционирует на ходу. Методом проб и ошибок – то есть, часто падая – он учится ходить по, например, ледяной поверхности, укорачивая ноги для занижения центра тяжести. В помещении он может удлинить их, чтобы увеличить длину шага и повысить эффективность передвижения. Возможно, удастся скомбинировать две этих технологии: использовать симуляцию для разработки подходящего дизайна ног, а затем встроить его в реальную машину, способную изменяться.
И если у эволюции что и получается хорошо делать, так это удивлять. «Эволюция ищет ответы в гораздо более широком спектре вариантов, — говорит Говард. – Ей всё равно, как выглядит получившаяся вещь. Она может выглядеть совершенно контринтуитивно, не так, как придумал бы инженер-человек. Но если это работает – больше ничто не имеет значения».
BigBeaver
C фитнесс функцией накосячили?)
georgeci
Да, тоже так подумал. Очень похоже на 42 в ответ на вопрос о смысле жизни.
TheKnight
Sadler
Да тут можно было накосячить где угодно: от процесса генерации, который мог бы быть и попрямее, до реализации физики в тестовой среде. Вот если бы они печатали все 100к вариантов ног на 3d-принтере и заставляли робота пробежать стометровку (желательно с учётом того, что разными ногами нужно управлять немного по-разному), это было бы круто. Пока что все примеры из статьи выглядят как жертвы зверского альясинга, какие-то интересные особенности в этом шуме разобрать сложно.
KevlarBeaver
Завидую машинам. У них есть (будет) возможность практически безгранично прокачивать свой интеллект и (sic!) свои физические оболочки. Хотя, наверное, рациональнее будет мозгу сидеть где-то в бункере, а на бой с остатками мясных мешков на Земле посылать полуавтономных дронов.
Sunny-s
кто сказал, что на бой? возможно, нас ждет бессмертие в виде киборгизации, отмены старения или оцифровки сознания, которые станут возможны благодаря суперинтеллекту.
Stasgar
Будет достаточно грустно, если этот «перенос сознания» на самом деле будет лишь копированием — т.е. вы настоящий умираете, а в другой объект переносится уже лишь ваша копия — она все также помнит всю вашу жизнь, но никто и никогда не поймет, что это не вы.
Heian
Так оно и будет. Сознание лишь следствие, а не что-то отдельное, и перенести его нельзя.
cheburen
есть одно интересное рассуждение о постепенном замещении клеток мозга искусственными нейронами, в какой момент сознание покинет этот мозг? или при таком способе мы сможем перенести сознание на полностью не органическую основу?
bask
Более того, все клетки организма полностью обновляются каждые несколько лет. Поэтому то вы, который был 10 лет назад — совсем другой человек, состоящий из совсем других клеток
perfect_genius
Погрустите немного за свой умерший оригинал, да продолжите жить как ни в чём не бывало. Ну а оригинал грустить тоже не будет.
DGN
Каждый вечер я немного грущу…
YMA
Уже третий раз за полгода поднимается эта тема — Хабр (и в целом IT сообщество) стареет и начинает задумываться о смерти?
PS: 18-30 летние фидошники и сотрудники отделов АСУ 90-х, привыкшие к активному участию в онлайн-общении, сейчас уже 40-50 летние. Еще 15-20 лет и интернет начнет превращаться в онлайн-кладбище аккаунтов умерших людей.
perfect_genius
Эта тема всегда была на Хабре — те же вопросы и те же ответы, из раза в раз, до жуткой банальности.
slonpts
Вариант — частичная постепенная киборгизация.
1) Заменяем 1 естественный нейрон на искусственный, ждем, пока мозг включит его в свою работу.
2) Заменяем 2-й, ждем.
…
10^11) Заменяем 10^11-й, ждем.
10^11 + 1) ???
10^11 + 2) PROFIT!
И по подобному (хотя и не настолько прямолинейному) пути человечество движется уже давно.
Для ориентирования на местности, хранения информации, получения новостей, удовлетворения информационного голода, общения используем смартфоны. Для передвижения многие почти срослись с автомобилем. Просто кибернетическая часть пока еще требует глаз для передачи информации в мозг и рук/голоса для передачи информации из мозга.
А до этого были бумага, глиняные таблички и колесницы.
Так что, может, умирать для «оцифровки» вовсе и не придется :)
Rsa97
Потом даём команду всем искуственным нейронам одномоментно зафиксировать состояние в буфер и вуаля, можно делать полную копию…
betrachtung
Ну так это и будете вы.
Для того, чтобы скопированный был принципиально отличен от оригинала и не являлся одной личностью с ней при тождественном опыте и wetware/hardware, приходится обращаться к понятию души. Если не верить в душу, то неизбежно получается, что моя тождественная копия — это я (до образования нового опыта).
Megakazbek
Но с другой стороны, вполне возможно, что это и так уже происходит каждое утро. Ведь откуда нам знать, что сознание, с которым мы просыпаемся — это именно непрерывное продолжение вчерашнего, а не вновь возникшее?
greensky
Не понимаю, чем недовольна углеродная форма жизни. У вас есть те же возможности по прокачке мозга и тел, просто вы их пока не реализовали.
Нужно только досконально изучить принципы собственного функционирования и отработать технологии сборки произвольной [обратно совместимой, если будем использовать старые узлы] конструкции homo sapiens. И машинам сначала придется сделать то же самое — кто сказал, что они получат готовые инструкции по собственной сборке и модификации?
Daddy_Cool
Очень интересно!
Вообще кроме типа поверхности есть еще факторы обусловленные внутренним строением ноги-привода. Грубо говоря — чтобы бегать по гравию долго — нужна одна форма, а чтобы быстро — другая. Кстати любопытно — чем конечности волка отличатся от конечностей гепарда. Общая схема вроде примерно у всех одинаковая — и тоже интересно почему именно такая схема оказалась наиболее эффективной.
А получение на симуляторе хотя бы чего-то похожего на крыску из кого-то более простого — там из ящерицы — было бы ого-го каким событием. От пресмыкающихся до млекопитающих где-то 100 млн. лет, значит это где-то до миллиарда поколений.
oldbie
Ответ — никакая не оказалась. Каждый из них, и волк и гепард, лучше приспособлен для своей ниши. Да и дело не только в ногах.
lexxpavlov
Руки, крылья… Главное — хвост! (с)
tbl
Подозреваю, что с физикой в модели воды накосячили: её нельзя рассматривать, как сыпучее тело (для него как раз подходят толстые ноги). Уравнения неразрывности (непрерывности), сохранения импульса, сохранения энергии, для каждой точки жидкости вот это всё должно учитываться (а не выбрасываться, для упрощения вычислений при моделировании). В более сложной модели ещё можно учитывать зависимость параметров жидкости от температуры, тогда дополнительно уравнение теплопроводности нужно в расчёт брать.
popov654
Я даже догадываюсь, в чём именно дело.
Чтобы стоять на поверхности воды, нужен или сверхмалый вес как у водомерок (тогда площадь не так уж и важна, но меньше — легче), тогда мы держимся за счёт силы поверхностного натяжения. Но это не наш случай, вес робота больше на порядки.
Остаётся второй вариант — делать ногу максимально широкой, чтобы она не успела глубоко погрузиться (и в целом увеличивать объём погружаемой части, тогда архимедова сила будет больше).
Если же сделать четырёхногого робота с ластами, и пытаться поднимать эти ласты из воды — подъём будет намного более трудным, чем из сыпучего вещества. И имхо, проблема тут в образовании завихрений…
P.S. Я не физик, просто догадка.
tbl
У песка в отличие от жидкости очень сильное трение покоя как между частицами, так и на границе сред.
popov654
Окей, и что это даёт? Мы же рассматриваем момент, когда нога уже провалилась в песок. Второй момент — ну допустим, большее трение покоя мешает песку сразу распадаться на мельчайшие частицы, и способствует образованию комочков, что для жидкости неверно. А с первым вообще не понятно.
Всё-таки, вы пробовали ногу с надетой ластой вытащить из воды? Это дико тяжело, причём нагрузка «плавает» и зависит от скорости движения и изгиба. С песком было бы, имхо, легче — хоть и его масса над поверхностью ласты была бы побольше.
defuz
garbage in garbage out
AlexAV1000
Эволюция гоночных автомобилей на JavaScript
imwode
>Теперь они планируют проверить их эффективность на реальной поверхности
Здраствуйте. Я, Кирилл. Хотел бы чтобы вы сделали игру, 3Д-экшон суть такова…
А еще у одного мужика однажды идея была…
Мож сначала проверить, сравнить, а потом «нечто странное» публиковать?
DrZlodberg
Судя по картинке с роботом это, всё-таки, ногой назвать сложно. Примерно как деревянный костыль в качестве замены ноги у человека. По сути они ген. алгоритмом определяли, какая площадь опоры потребуется для каждого вида покрытия. И всё.
Ожидал всё-таки пусть не механическую ногу, но хотя бы какую-то структуру, а не просто размер блина даже без учёта (похоже) веса конструкции.
hrenly
Ситуация с эволюцией и «ногами» встречалась у Стругацких в «Полдень, XXII век (Возвращение) – Глава 3. Загадка задней ноги
Но там намеренно подпортили алгоритм…
Shamanay
Дэвид Говард… Воловиц? У него неплохие аппараты получаются.