
Приветствую Хаброюзеры. Меня зовут Евгений и в серии статей я хочу рассказать о процессе разработки и тестирования системы предотвращения столкновений промышленной техники и людей, работающих с ней бок о бок.
Но сначала небольшая история. Один северный город нашей необъятной. В городе есть большая шахта, которая по сути является для жителей города основным местом работы. Пятница, рабочий день уже перешел в послеобеденное время. Горнорабочие на горизонте 720 метров отпраздновали день рождение коллеги распитием алкоголя, пронесенного на территорию объекта тайно. И вот один захмелевший горняк пошел проветриться перед выходом на поверхность, но в процессе немного устал и задремал на рельсах подземной железной дороги для вывоза руды. Разбудил его электровоз, машинист которого в темноте не заметил неудачливого горняка, дремавшего у рельса. В результате наезда электровоза на шахтера, он лишился кисти руки. Страшная история, и много таких же историй из других уголков России каждый раз заставляют различных руководителей задуматься. А что можно сделать, чтобы таких историй было меньше или вообще больше никогда не было. Вот тут и начинает формироваться запрос на систему, которая будет решать задачи предотвращения наездов техники на людей.
Предыстория вопроса, побудившая нас заняться разработкой такой системы в 2016 году такова. Горная добыча полезных ископаемых является одной из самых опасных профессий в мире. А в нашей стране это одна из ключевых отраслей экономики после добычи нефти и газа. Добыча полезных ископаемых во всем мире ведется двумя способами: открытым (поверхностным) и подземным.
Мы, как разработчик систем позиционирования достаточно давно занимаемся позиционированием горнорабочих в шахтах и в настоящее время практически на всех шахтах вопрос позиционирования в той или иной степени решен. Но инциденты, связанные со столкновениями горной техники и наездами техники на персонал к сожалению, продолжают происходить. На западе данный вопрос начал решаться еще в 2006-2010 годах разработкой и внедрением систем предотвращения столкновений. В первую очередь там внедрялись такие системы на карьерах, так как там чаще происходили подобные инциденты. С марта 2019 года и в России стала обязательна установка систем предотвращения столкновений, но только не на карьерах, а в шахтах. И вот тут мы подходим собственно к ТЗ и запросу на подобные системы.
Все горнодобывающие предприятия в России обязаны соблюдать правила промышленной безопасности. Следит за соблюдением этих правил Ростехнадзор (Федеральная служба по экологическому, технологическому и атомному надзору) и мы в первую очередь учитывали требования выдвигаемые данной службой при разработке системы. Но так как требования к системам предотвращения столкновений в нашей стране прописаны пока что достаточно общими словами, в составлении ТЗ для разработки, сценариев тестирования и критериев приемки мы опирались на международный документ, разработанный EMESRT (Earth Moving Equipment Safety Round Table). Это организация объединяющая горнодобывающие компании, государственные структуры, производителей оборудования для горной добычи, сервисные и инжиниринговые компании по всему миру.
Данная организация разработала классификацию систем управления и безопасности для горной добычи:
- Уровень 7 — Осведомленность оператора
Технологии, которые предоставляют информацию для повышения способности оператора наблюдать и понять потенциальные опасности в непосредственной близости от оборудования.
- Уровень 8 — Консультативный контроль
Технологии, которые предоставляют сигналы тревоги и / или инструкции для повышения способности оператора предсказать потенциальное небезопасное действие и необходимые корректирующие действия. - Уровень 9 — Контроль вмешательства
Технологии, которые автоматически вмешиваются и принимают некоторую форму управления оборудованием для предотвращения или снижения последствий опасной ситуации.
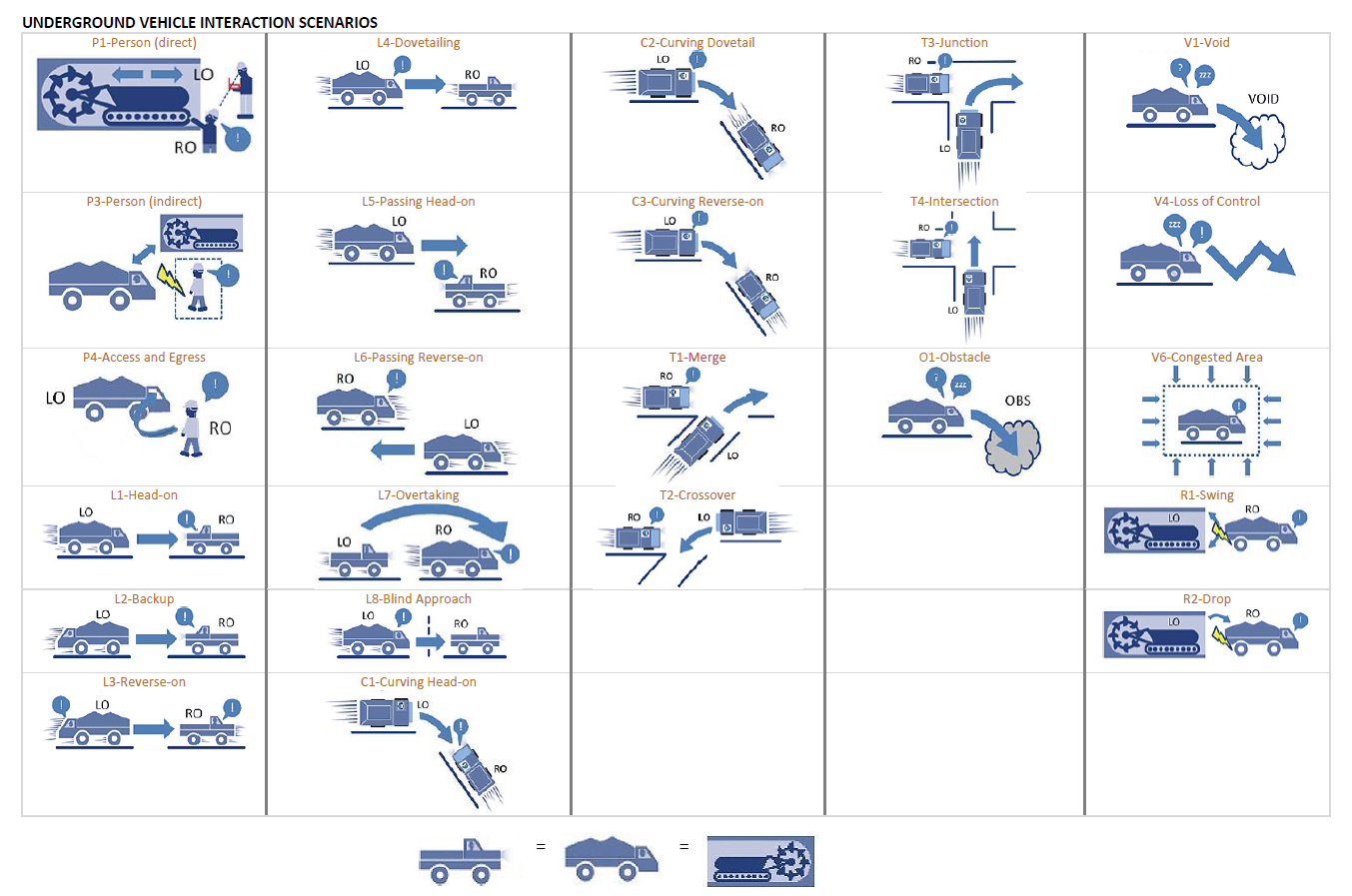
За основу разработки системы и программу последующих тестов и сценариев тестирования был взят документ Vehicle Interaction Systems, в котором прописаны основные сценарии и ситуации возникающие при работе техники и людей в горной добыче и возможные инциденты с ними.
При разработке системы для горной техники нужно исключить следующие опасные ситуации или свести вред от них к минимуму (минимизация последствий инцидента):
- Травма из-за дизайна рабочей станции и внешних конструкций
- Травма или госпитализация, полученная в следствии физической и/или умственной усталости
- Вред от нарушения видимости (включая искаженную или ухудшенную видимость) или нарушения осведомленности об опасностях в различных условиях эксплуатации
- Вред от ограниченного или затрудненного обзора оператором окружающей среды и работы рабочего инструмента
- Вред от столкновений, вызванный движением людей и транспортных средств, в слепой зоне видимости оператора
- Вред от потери устойчивости машины во время работы, перемещения, сочленения
- Вред от неправильного использования средств управления оборудованием, неправильной / неточной калибровки или неэффективного обслуживания из-за плохо разработанных элементов управления и дисплеев
- Вред от неправильного толкования информации на дисплеях или табличках
- Вред, в том числе умственная перегрузка, от пропущенных предупреждений и сигналов тревоги, которые игнорируются или их не слышно
В них заложены требования, как к самой системе, так и к виду устройств, визуализации уведомлений и способам оповещений.
Согласитесь, гораздо больше требований к системам предотвращения столкновений, чем в российской редакции правил промышленной безопасности для горнодобывающих компаний (Приказ от 11 декабря 2013 г. №599 Об утверждении федеральных норм и правил в области промышленной безопасности «Правила безопасности при ведении горных работ и переработке твердых полезных ископаемых»), где написан всего один пункт:
Пункт: 325 Транспортные машины, эксплуатируемые на шахтах по добыче полезных ископаемых, должны быть оборудованы системами предотвращения столкновений. Система предотвращения столкновений должна обеспечивать своевременное оповещение машиниста о наличии людей и транспортных средств в радиусе траектории движения машины.
Именно гораздо больший список изначальных требований к системе предотвращения столкновений описанный EMESRT и учет этих требований при разработке продукта позволит соответствовать всем существующим и новым требованиям, которые возможно будут добавлены в соответствующие документы и регламенты для Российских горнодобывающих предприятий в будущем.
Так мы подошли к ключевым сценариям работы техники и людей, при которых система предотвращения столкновений должна определять опасность и предупреждать о ней всех участников такой ситуации.
Список сценариев для горной добычи:
- P1-Человек находится непосредственно рядом с машиной
- P3-Человек находится под наблюдением при работе с машиной и оборудованием
- P4-Человек садится в кабину или выходит из нее
- L1-Лобовое сближение со стоячей машиной
- L2-Сближение машины при движении обратным ходом со стоячей машиной
- L3-Сближение 2х машин при движении каждой обратным ходом
- L4-Сближение 2х машин при движении одна за одной
- L5-Разъезд двух машин, двигающихся навстречу друг другу
- L6-Две машины двигаются назад, при этом одна машина обгоняет другую
- L7-Сближение 2х движущихся машин и обгон одной из них
- L8-Сближение в условиях нулевой видимости
- C1-Сближение 2х машин на встречу друг другу при движении по изгибу дороги при недостаточной видимости
- C3-Сближение машины, двигающейся вперед с машиной, двигающейся назад в условиях изгиба дороги при недостаточной видимости
- T1-Сближение 2х машин, двигающихся в одном направлении на перекрестке
- T2-Сближение 2х машин навстречу друг другу при намерении повернуть на перекрестке одной из машин
- T3-Сближение 2х машин, двигающихся в одном направлении на Т-образном перекрестке под углом 90 градусов
- T4-Сближение 2х машин, двигающихся в одном направлении на пересечении 2х технологических дорог
- R1-Машина с вращающимся рабочим инструментом работает рядом с другой машиной
- R2-Машина перегружает материалы на другую машину
- O1-Машина сближается с неподвижной конструкцией, стеной или стационарным оборудованием
- V1-Мажина въезжает в запрещенную зону, где запрещено движение
- V4-Машина движется без управления оператора
- V6-Машина движется по территории, где находится большое количество других машин и людей, например, мастерская
Всего 24 сценария, которые охватывают 99% всех типовых задач, решаемых при подземной добыче полезных ископаемых, где используется самоходная техника, транспорт и могут находиться люди.
Дальше я расскажу, как мы выбирали технологии для разработки продукта, через что пришлось пройти при его создании и что получилось на выходе, а также как тестировался каждый из сценариев, описанных выше.
Технологии и решения для создания системы предотвращения столкновений
Мы с 2016 года занимаемся разработкой подобных систем предотвращения столкновений, и Вы можете почитать об этом в стате на Хабре здесь.

За это время мы сменили технологию с устаревшей на тот момент технологии Nanoloc на более перспективную технологию UWB. Подробнее о технологии UWB мы писали на Хабре тут и тут.
В чем преимущество технологии UWB (СШП) для позиционирования объектов?
- Высокая точность позиционирования: до 10 см.
- Устойчивость к отражениям радиосигналов в условиях прямой видимости.
К 2018 году на основе технологии UWB была разработана и прошла несколько стадий развития система предотвращения столкновений.
 " alt=«image»/>
" alt=«image»/>
Сейчас система состоит из следующих компонентов:

Тег (TAG) – микросхема с поддержкой технологии UWB, встроенная в фонарь шахтера или выполненное на её базе отдельное устройство.

Антенна (VBU) – устанавливается на обшивку транспортного средства. В ней находится также чип UWB, который и определяет расстояние до другого чипа UWB по ToF (Time of Flight).

Контрольный блок (VCU) – микрокомпьютер, обрабатывает полученные замеры от антенн и по математическому алгоритму определяет местоположение тега относительно транспортного средства и отправляет данные для визуализации на дисплей водителя.

Дисплей (VOD) – осуществляет визуальное представление информации о местоположении тегов относительно автомобиля.
В основе UWB технологии позиционирования лежит чип ирландской компании Decawave. Чипы имеют собственную антенну, благодаря которой могут измерять время прохождения сигнала между собой. Так как в VBU находится такой же чип UWB, как и в тегах, то они детектируют друг друга при наличии радиовидимости и тоже производят замеры между собой. Этот принцип позволяет определять время пролета сигнала, как между антеннами транспортных средств, так между антенной и тегом.
Отсюда мы получаем два направления контроля:
- транспорт-транспорт (Vehicle to Vehicle или V2V)
- транспорт-человек (Vehicle to Personnel, V2P)
Принцип работы системы
В основе системы лежит принцип создания вокруг транспортного средства 3-х зон контроля опасных сближений. При этом зоны могут быть любой формы и учитывать, как особенности конструкции, так и параметры движения транспортного средства.
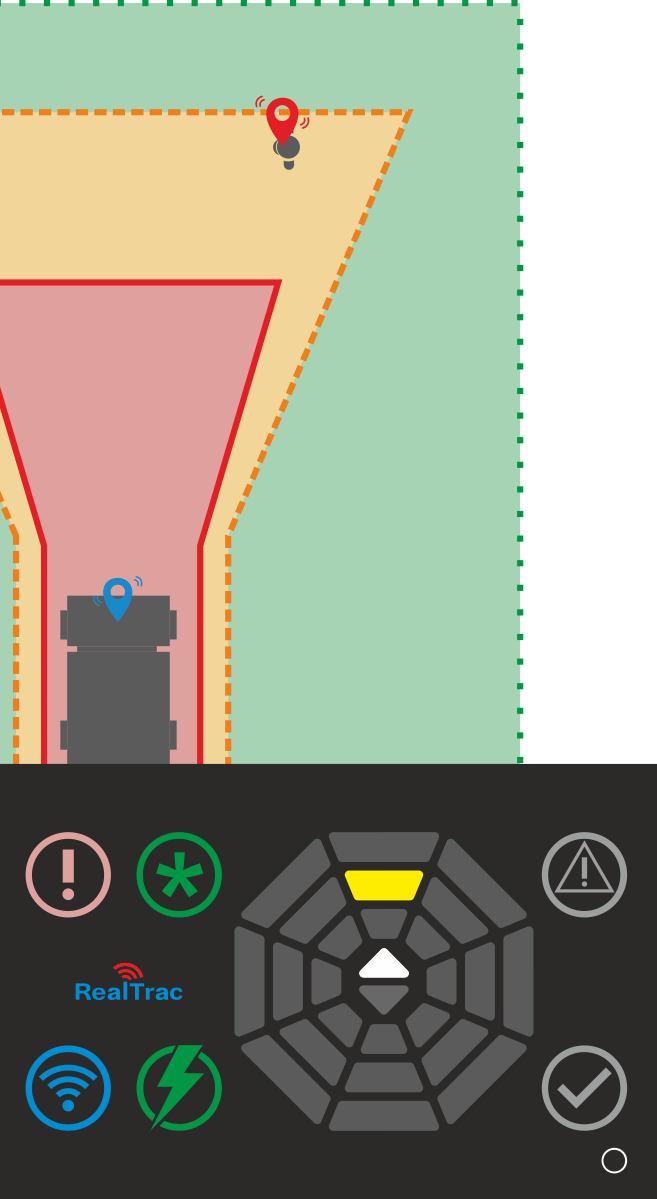
Зона «Внимание»
Предупреждает работников о наличии транспорта, техники и пр. на малом расстоянии.
Система сигнализирует о возможном опасном сближении и позволяет обратить внимание водителя и горнорабочего на факт сближения с другим объектом.
Антенны (VBU) излучают в пространство вокруг транспортного средства UWB сигнал в поиске других антенн (VBU) или персональных тегов (TAG) в зоне радиовидимости.
При обнаружении других антенн (VBU) или персонального тега (TAG) в зоне «Внимание» производится замер расстояния от антенны (VBU) до объекта.
Данные о замерах расстояния передаются в контрольный блок (VCU), где производится расчёт местоположения обнаруженных объектов на дальности, направлению и зоне.
Результат расчёта выводится на дисплей водителя (VOD).

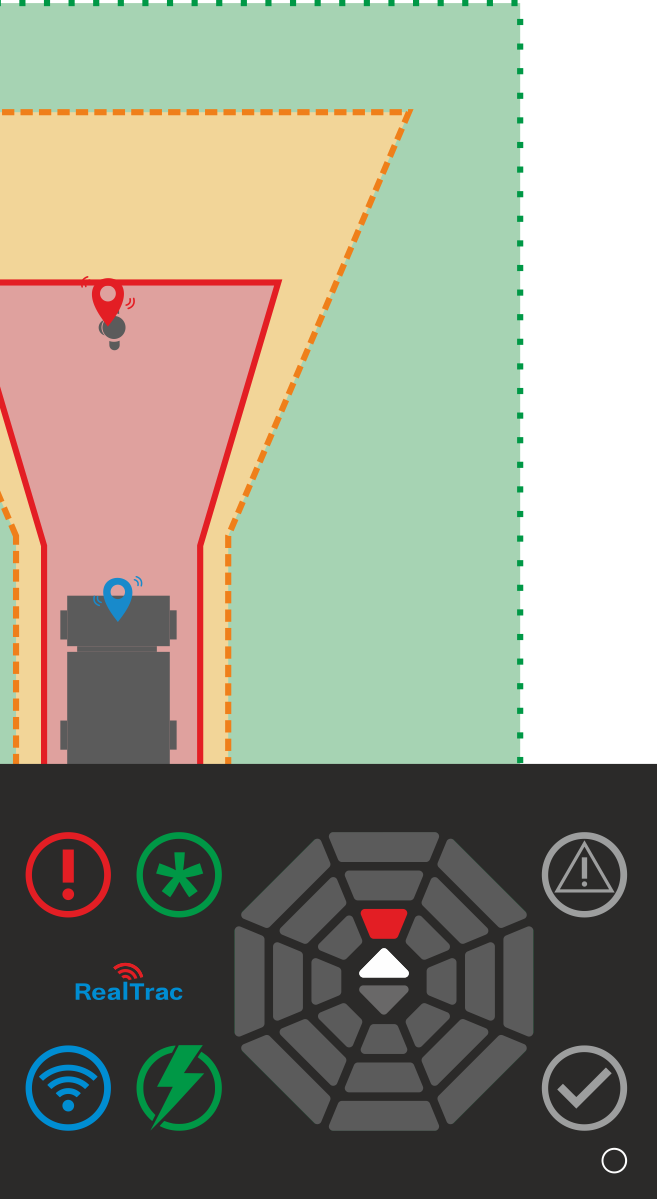
Зона «Опасность»
Фиксирует опасное сближение и привлекает внимание работников, может замедлять технику и транспорт.
Система оповещает о возможной аварии и позволяет обратить внимание водителя и горнорабочего на факт сближения с другим объектом.
Водитель видит на дисплее (VOD), в какой зоне находится обнаруженный объект и при его приближении к транспортному средству объект будет перемещаться из зоны «Внимание» в зону «Опасность» на дисплее (VOD). При этом в кабине появится световое и звуковое оповещение (VOD) о входе объекта в зону «Опасность», как в кабине водителя, так и с наружной части транспортного средства будут включены проблесковые маяки и звуковое оповещение. При этом на персональном теге сотрудника (TAG) или в кабине другого транспортного средства, оснащенного продуктом «RealTrac Предотвращение столкновений» также включится звуковое и светографическое оповещение.
Зона «Авария»
Генерирует сигнал тревоги при входе другого объекта, оснащенного системой в зону Авария.
При входе объекта из зоны «Опасность» в зону «Авария» включаются все способы оповещения водителя транспортного средства. На дисплее водителя (VOD) горит красный сигнал опасности и звучит постоянное звуковое оповещение. На персональном теге горнорабочего (TAG) также включается звуковое оповещение и вибрация, оповещающая о нахождении в зоне «Авария».
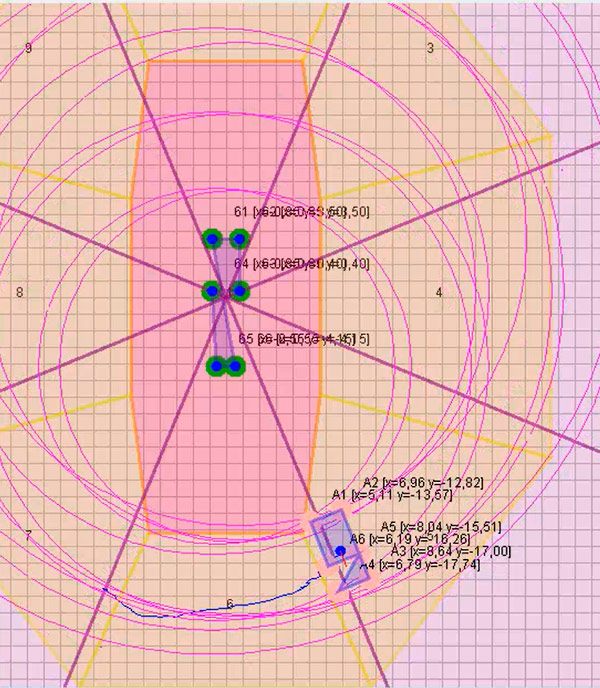
Вот так выглядят зоны контроля в конфигураторе системы предотвращения столкновений. Видны точки установки антенн на транспортном средстве и тег установленный на другое ТС. Шаг сетки 1 м.
Это принцип работы системы, описанный в теории. Как все это выглядит на практике я расскажу во второй части статьи через неделю.
Если у Вас есть вопросы пишите в комментариях.
Комментарии (10)

vagola
16.10.2019 15:04Хотелось бы узнать в следующей статье больше технических подробностей о вашем решение
realtrac Автор
16.10.2019 15:06Да я так и планировал, просто нужно как то погрузиться в тему. Поэтому решил начать с требований, чтобы потом при рассказе о технической реализации ссылаться на требования и сценарии.

Tachyon
17.10.2019 06:28На КДПВ — чуть «канистру» не раздавил. А если серьёзно- на сколько помню у белазов принцип рабботы такой же как у тепловозов: Жгем солярку дизелем- вырабатываем электроэнергию- электроэнергией питаем электромоторы- едем. Когда-то слышал о том как старый паровоз приспособили как передвижную котельную отопления жилых домов. Интересно много ли передвижных ТЭЦ (ведь по сути это так и есть) сделано из тепловозов или белазов?
realtrac Автор
17.10.2019 12:02Не думаю что это оправдано. Так как стоимость Белаза выше, чем стоимость котельной.
Saiho
17.10.2019 11:23Расскажите пожалуйста какие технологии, кроме Nanoloc и UWB, рассматривались и почему они были отброшены? Выбор не велик?
И еще один вопрос, если позволите. Это дорогая технология? Только горняки могут себе позволить? Потенциально ведь опасные объекты это и стройки и цеха и даже уличное движение.realtrac Автор
17.10.2019 12:11Рассматривали технологии на магнитных полях и ультразвуке, но либо нет необходимой точности, либо очень дорого в конечной реализации, либо не применимо в сложных условиях. Есть ряд технологий, которые будут включены в следующие версии продукта, но пока что о них не могу говорить.
Основная цель была горняки. Также можно применять для складов. Так как уже прошел ряд итераций развития на текущий момент технология не такая дорогая, как 2-3 года назад. Но в основном применима для крупного и среднего бизнеса.
В уличном движении не применима, так как нужно оснащать все транспортные средства такой технологией и это дорого. Тут я вижу развитие в лидарах, видеонаблюдении и тех технологиях, которые использует Tesla.
Denis_Kosyakov
Скажите, как Вы можете быть уверены в том, что когда система предупредит машиниста об опасности столкновения, машинист примет правильное решение и не совершит наезд/столкновение ?!
realtrac Автор
Человеческий фактор всегда присутствует. Мы пока что реализуем контроль 7 и 8 уровня:
Уровень 7 — Осведомленность оператора
Уровень 8 — Консультативный контроль
Вмешательство не всегда оправдано и не всегда возможно. Например зимой запрещено останавливать технику на уклонах, так как возможно её сползание.
Denis_Kosyakov
Получается, остановить технику и предотвратить столкновение избежав тем самым и жертв и ущерба, с помощью Вашей системы возможно ?!
realtrac Автор
Да возможно, если в этом есть необходимость.