 Фото: news.mit.edu
Фото: news.mit.eduИсследователи из Массачусетского технологического института создали «сенсорную» кожу, которая поможет мягким роботам понять свое расположение в трехмерном пространстве. Это становится возможным благодаря гибким датчикам и системе искусственного интеллекта, встроенным в материал.
 Фото: news.mit.edu
Фото: news.mit.eduМягкие роботы сконструированы из материалов с высокой степенью совместимости, аналогичных тем, которые содержатся в живых организмах. Это более адаптируемые и устойчивые альтернативы традиционным роботам. Однако обучение модели такого робота затрудняется тем, что он может двигаться в практически бесконечном количестве направлений в любой момент. Использование же громоздких систем с несколькими камерами, которые дают роботам представление о трехмерном пространстве, нецелесообразно в реальной среде.
Ученые представили описание системы мягких датчиков, которые покрывают тело робота для обеспечения «проприоцепции» — понимания движения и положения его тела. При этом новая модель глубокого обучения просеивает шум и фиксирует четкие сигналы для оценки трехмерной конфигурации.
Эксперименты проводились с использованием мягкой роботизированной руки, которая напоминает хобот слона. Исследователи заставляли ее поворачиваться и расширяться в случайных конфигурациях в течение примерно полутора часов. В процессе обучения модель анализировала наблюдаемые эмпирические данные от своих датчиков, чтобы предсказать конфигурацию, и сравнивала свои прогнозы с теми данными, которые собирались в тот же момент.
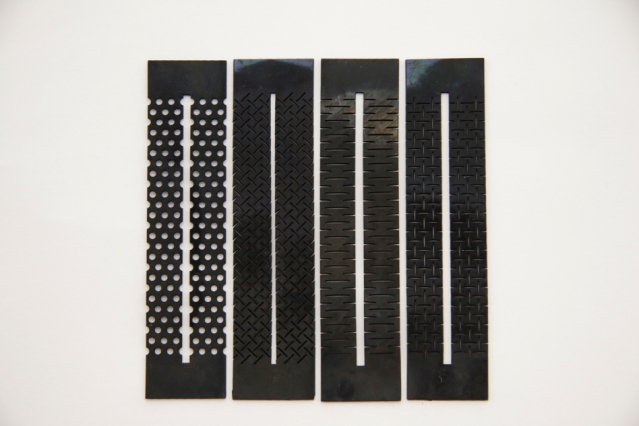
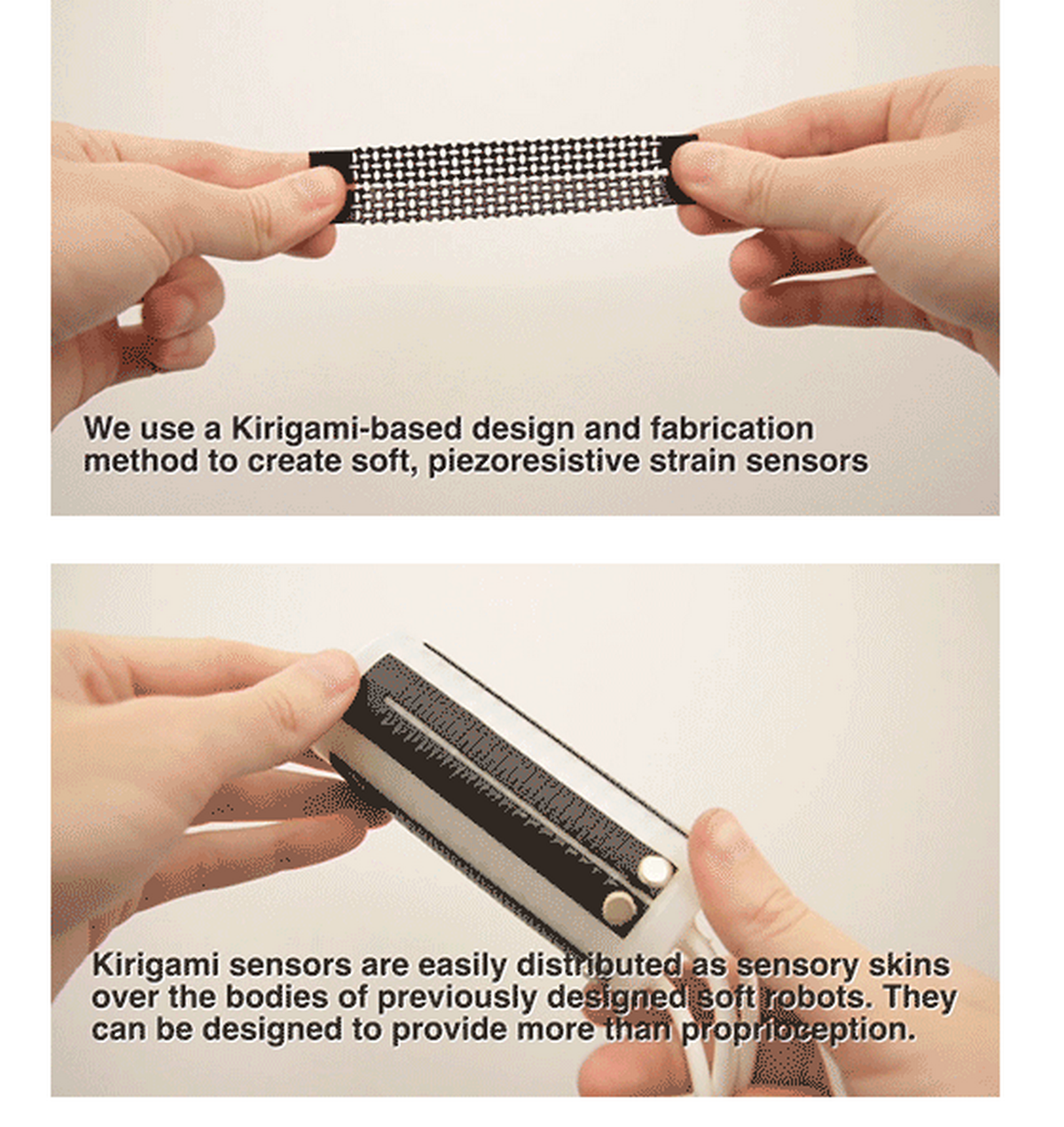
Силиконовый проводящий материал для мягких датчиков вырезали лазером в виде прямоугольников и собрали, вдохновившись техникой киригами (разновидности оригами, которая включает надрезы на материале), таким образом, чтобы его можно было растягивать и сгибать. Использовался готовый материал, и, как отметили авторы разработки, любая лаборатория может создать свои собственные системы. Используемые при разработке материалы обладают «пьезорезистивными» свойствами, то есть они изменяют электрическое сопротивление при напряжении. Таким образом, датчик деформируется в ответ на растяжение и сжатие магистрали, а его электрическое сопротивление преобразуется в определенное выходное напряжение, и уже оно используется как сигнал, коррелирующий с этим движением. Исследователи сделали надрезы на материале именно для того, чтобы увеличить его растяжение.
Ближайшая цель ученых — создать искусственные конечности, которые могут более ловко манипулировать объектами в окружающей среде. «Подумайте о своем собственном теле: вы можете закрыть глаза и восстановить мир на основе обратной связи с вашей кожей. Мы хотим открыть те же возможности для мягких роботов», — говорит соавтор работы Даниэла Рус.
См. также: «Ученые МТИ создали бионический робопривод, который заставляет сердце биться
Недавно ученые из Корнелльского университета и Института технологий в Италии разработали гибкие робопальцы, которые научили «потеть», чтобы охлаждаться. Данная технология позволит мягким роботам работать долго и взаимодействовать с горячими предметами, не перегреваясь.
См. также: «Как робот Атлас научился делать акробатические трюки, непосильные обычному человеку?