Все поверили в теорию управления. Мы не задумываясь задаем вопросы в научно-образовательной среде друг-другу с точки зрения ее положений. Судим о научных работах. Но почему же Теория не спешит дружить с практикой. Она прикладная наука. Но когда пытаешься «приложить» знания ТАУ к реальным объектам, возникают вопросы. В чем причина?
Нет, нет! Сомнений в положениях ТАУ у автора нет. Вопросы, конечно, будут. Это ведь все-таки «Теория». Просто, возможно, особенности отечественного образования и науки, или еще что-то, не позволили автору развиваться в прикладном ключе. Автор пока не может полностью ответить на поставленный ранее свой вопрос. Но вооружившись коке какой теоретической базой, пытается приложить их на практике. И предлагает к вашему вниманию открытые исследования привода пропеллера на DC моторе. Сейчас, в общем, только начало. Это вторая статья. С первой можно ознакомиться здесь.
На прошлой статье была получена модель объекта с дополнительной ОС, описывающей диссипативный характер нагрузки при работе пропеллера в воздушной среде.
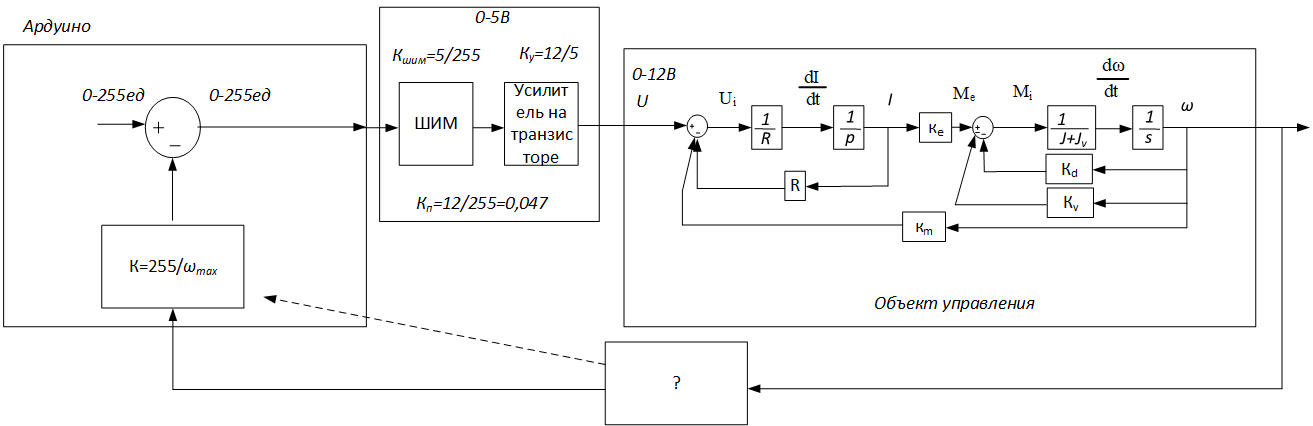
Рассмотрим схему системы автоматического регулирования (САР) скоростью вращения полученного объекта. Проект будет под Arduino, поэтому в операции сравнения и регуляторы будут работать с диапазоном данных от 0 до 255. В общем то — это первый момент, с чем пришлось разбираться и искать, где бы «порвать шаблон» теоретических убеждений. Соответственно при работе нужно работать и со статическими характеристиками системы. Система линейная, так что минимумы и максимумы диапазонов параметров представят статические характеристики. В модели нужно учесть преобразование этого диапазона 0-255 в 0-5 в ШИМ модуле и из диапазона 0-5 в 0-12 в преобразователе энергии. Коэффициент усилительного звена вычислим К=12/255=0,047.
Также нужно привести в соответствие диапазоны выходного параметра с диапазоном 0-255 обработки информации в ЦВМ. В дополнение к коэффициенту преобразования датчика необходимо прибавить виртуальный коэффициент, приводящий статическую характеристику к диапазону в контроллере. Данное обстоятельство так же ново для меня лично.
В итоге в обобщенном виде получаем.
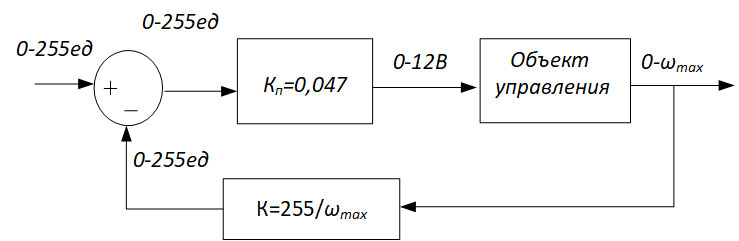
Преобразуем полученную в прошлый раз модель в разомкнутую САР. На вход подадим максимальное значение 255. Учтем коэффициент 0,047 преобразователя и ШИМ модуля.
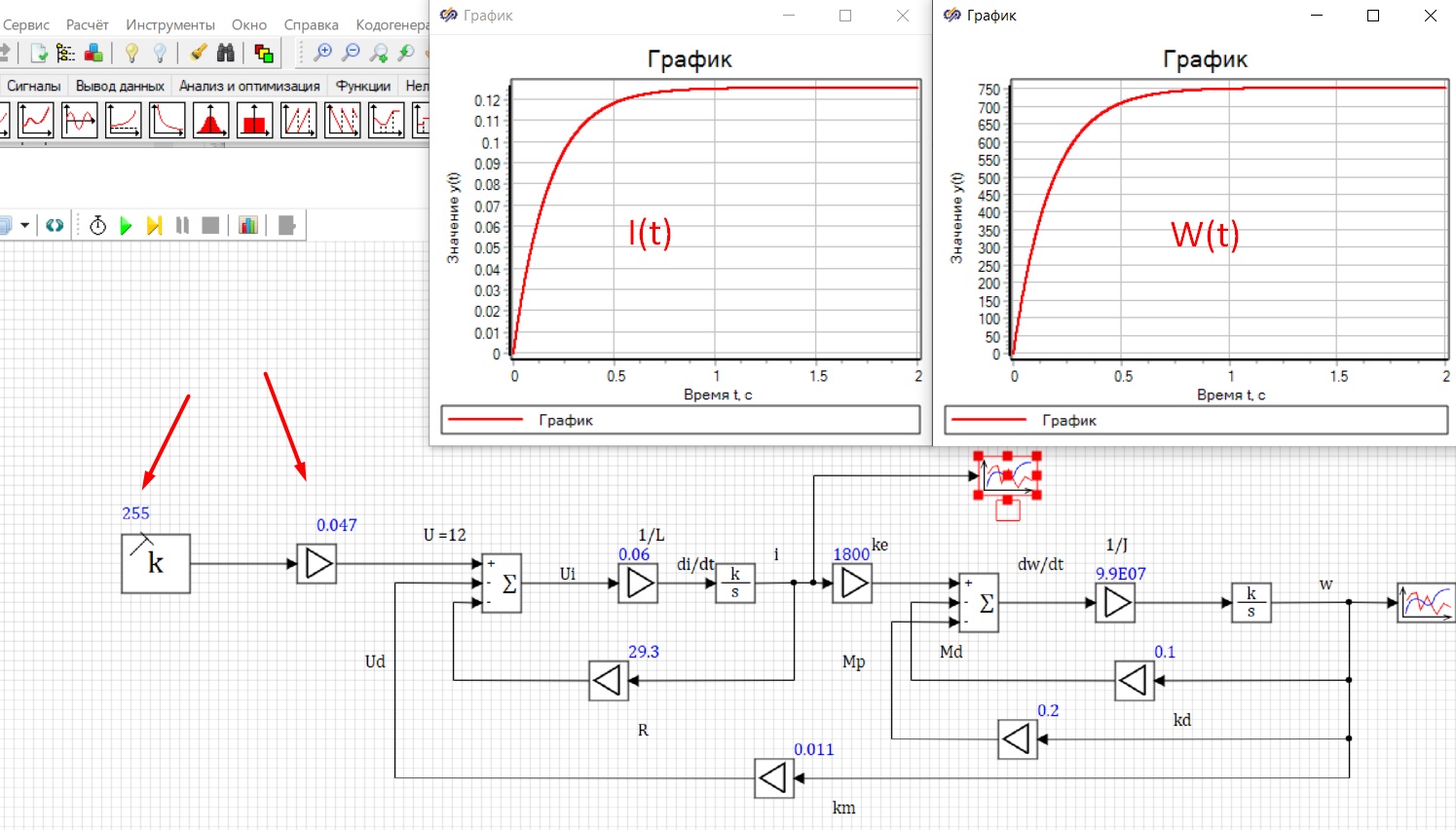
Построим обратную связь со значением рассчитанным выше коэффициентом. И рассчитаем модель.
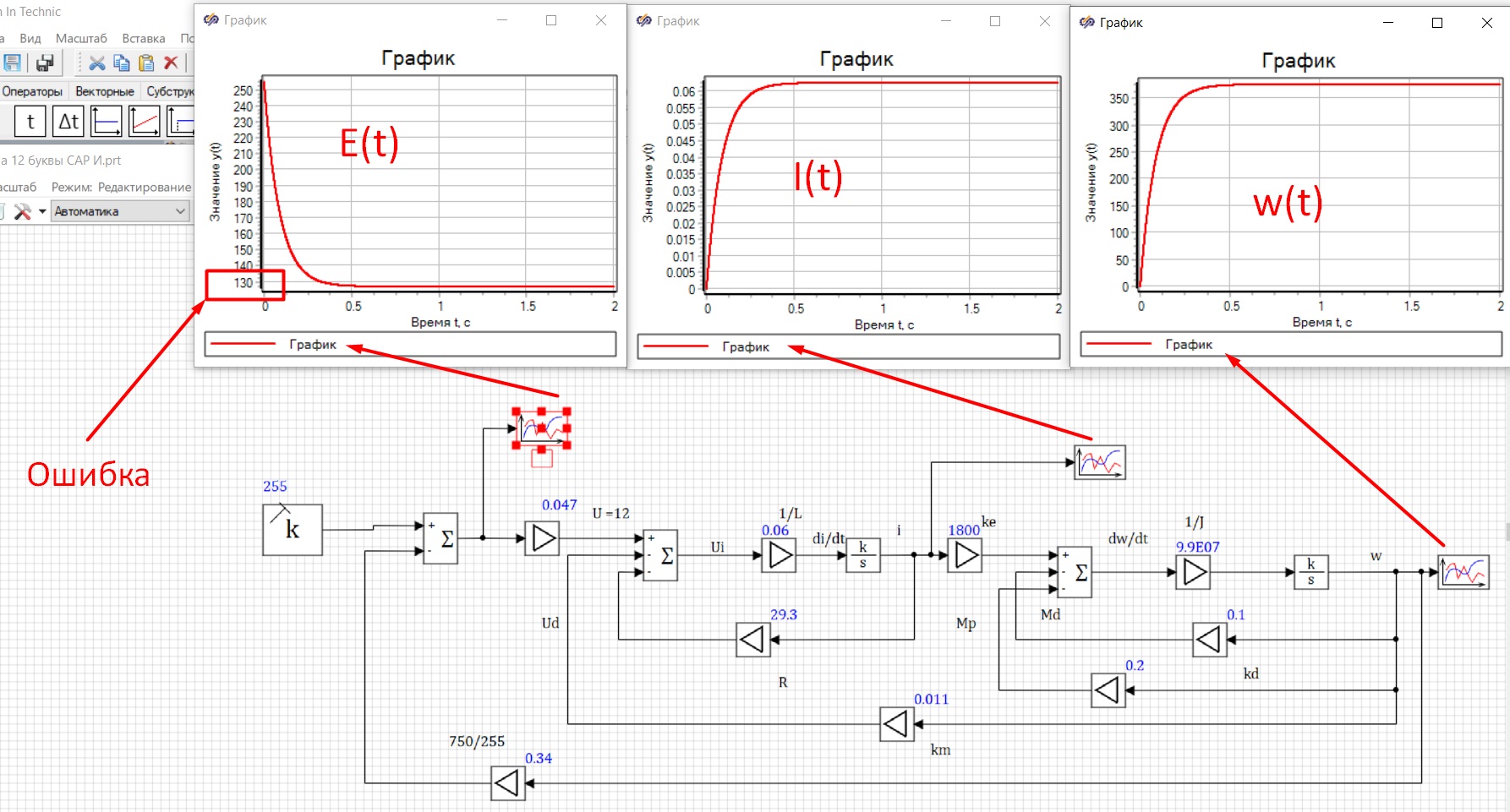
Здесь все в порядке. Получили САР плохую только по точности.

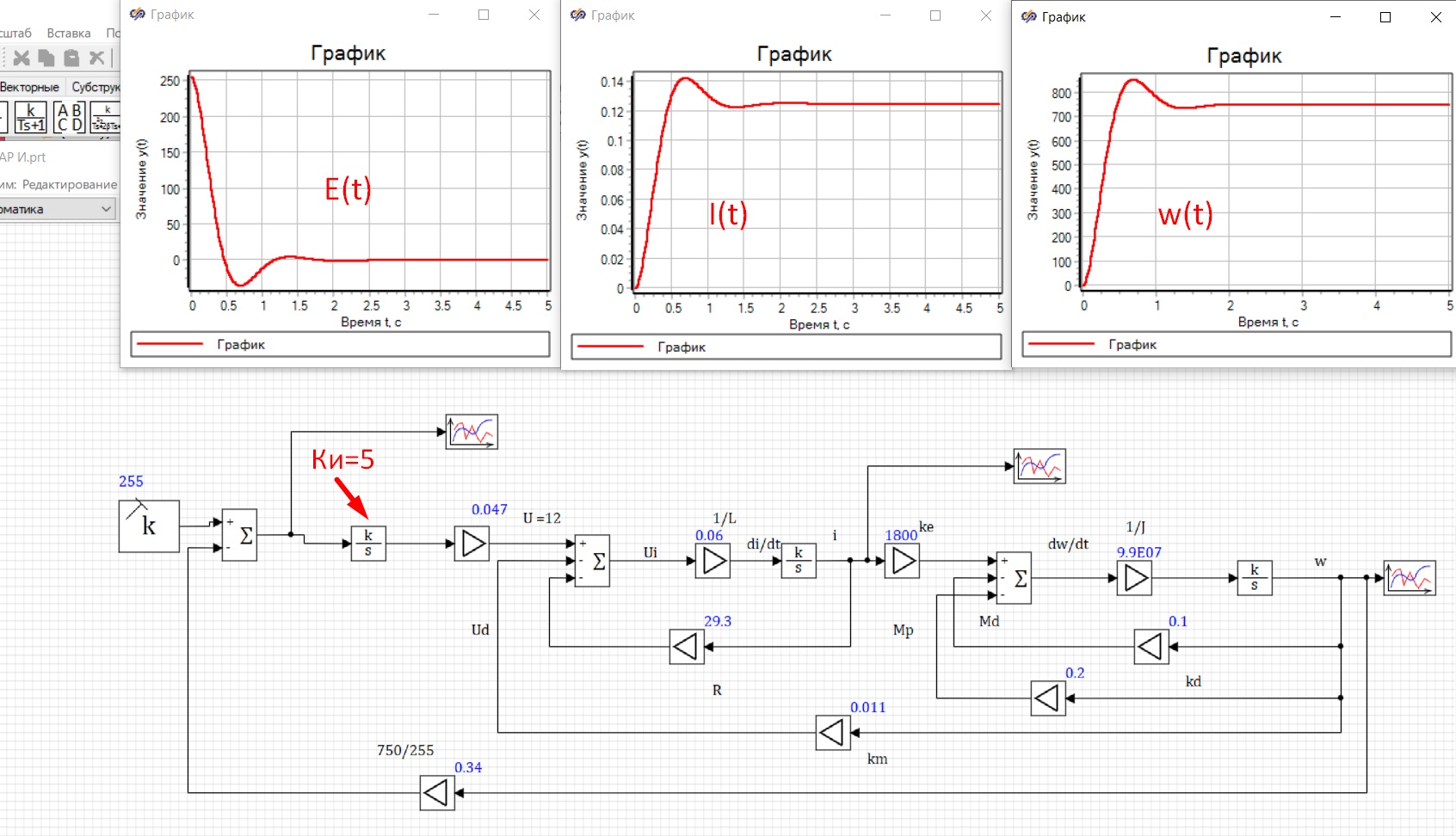
Рассмотрим сначала, в связи с этим, интегрирующий канал управления. С коэффициентом канала в 1. Ошибка поправлена. САР ушла по быстродействию.

Немного можно поправить быстродействие увеличением канала.

При дальнейшем увеличении появляются вопросы к качеству по колебательному критерию.
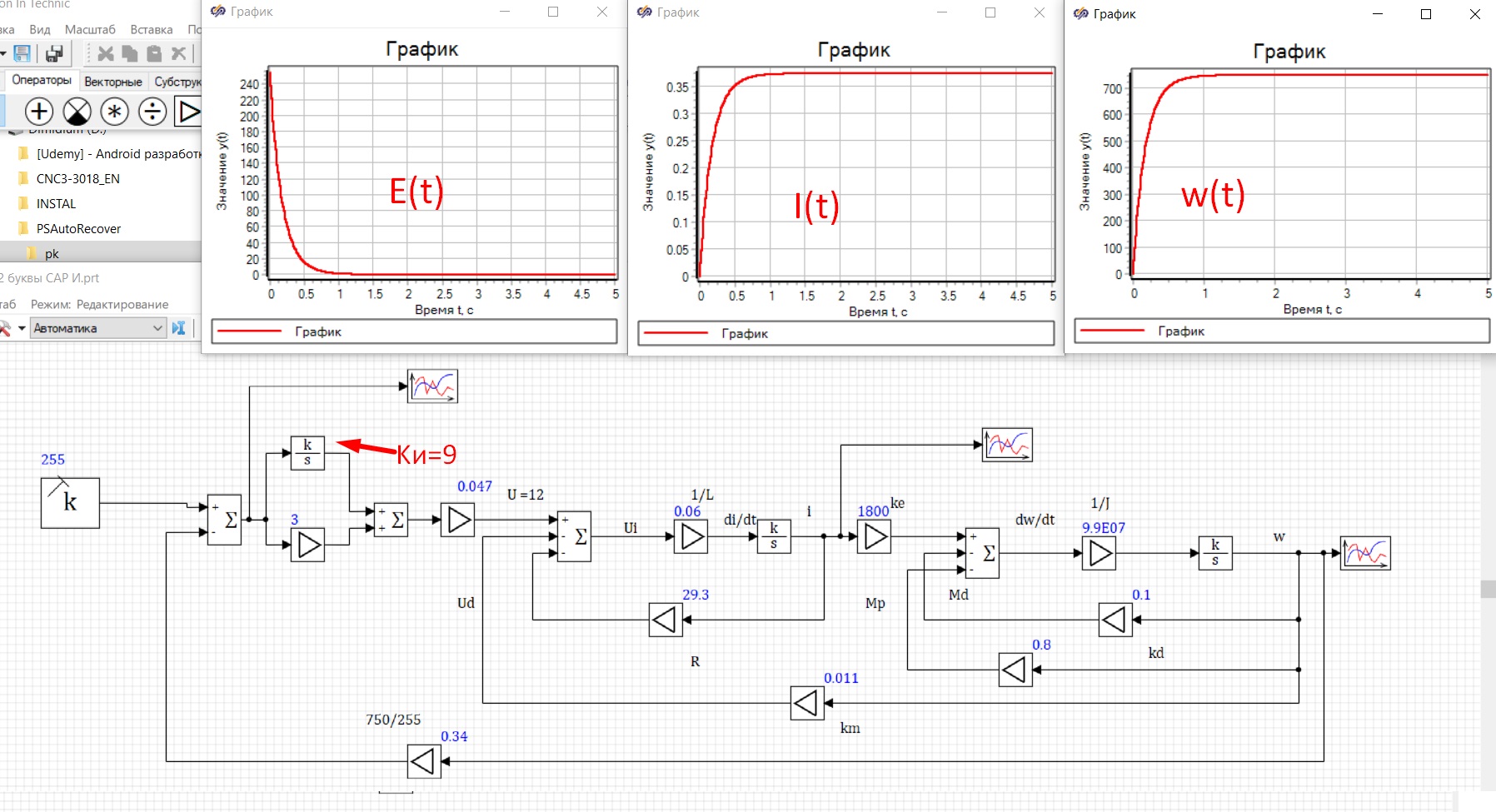
Добавляем пропорциональный канал и увеличиваем коэффициент интегрирующего канала и получим качественную систему.

Промоделируем ситуацию, когда вентилятор более производительный. Коэффициент диссипации 0,8. Система уходит по колебательной.

Изменяем коэффициенты регулятора и получаем снова хорошую систему.
Теперь уменьшим для эксперимента коэффициент ОС. И получим увеличение установившегося параметра. Конечно же за счет увеличении силы тока.

Если уменьшить в два раза уровень входного сигнала, то и выходной параметр делится на 2. Коэффициент ОС является инструментов для управления уровнем выходного сигнала. Перерегулирование не поправил, это возможно.

Видео с настройкой можно посмотреть ниже.
Понятно, что при разработке реального объекта и верификации именно систему управления будут еще вопросы. Ну это в будущем.
Так же можно познакомиться с небольшим опытом построения системы управления подобным объектом вот тут. Как то без объяснений, правда. Система Scilab интегрирована с Arduino. Довольно интересно получается. Правда здесь не было моделирования. Проблемв основная была в том, что две системы в месте не выдают в физический домен сигнала выше 127, при возможном максимуме 255. С датчика выходят большие помехи. При этом видно, что система увеличивает потенциал, при дополнительных возмущениях. Как бы пытается выполнить свои фукции.
Комментарии (5)

VT100
04.02.2022 20:02Не совсем понял — САПРу указано работать не только в ограниченном диапазоне, но и с целочисленными данными?

Dimidium Автор
07.02.2022 10:06Если Вас правильно понял и если речь переходах между диапазонами, то нет. Это так сказать - "анализ статических характеристик". А минимум и максимум диапазона - это две точки статической характеристики. Так проще.
При этом диапазон не ограничиваем, максимальное значение это пологаемый предел для физического объекта. Например контроллер выше чем 5 вольт на выходе и 255 едениц виртуальных не даст и.т.д.
Про целочисленные данные не понял вопроса.
FGV
А какие именно вопросы?
А ЦАП зачем? Обычно двигатели ШИМом крутят.
Dimidium Автор
У знакомого коптер, довольно дорогой. На дпт. Обратных связей нет. Пологаю безколлекторные двигатели уберают запаздывание ИМ. ДПТ дешевле, но применяют все таки бесколлекторные ИМ. Возможно ошибаюсь. Поправьте.
Да. Точно. Не придал значение и внимание оборудованию. ШИМ, который "фильтруется" в 5 В.
FGV
На больших квадриках ставят бесколлекторники (БК), т.к. у них выше КПД. По поводу отсутствия обратной связи - это не так, в регуляторе БК есть обратная связь по положению/скорости вала (счатают косвенно по напряжениям/токам фаз). Запаздывание никуда не убирается, оно есть и будет как на БК так и на коллекторных двигателях.
Собственно к ТАУ то какие вопросы?
Стало еще менее понятно. Лучше электрическую схему нарисуйте.