Роботы повсюду, они проникли во многие сферы деятельности. Это неудивительно – весь мир сейчас взял курс на автоматизацию процессов, согласно программе «Индустрия 4.0». Роботов можно увидеть в качестве автономных средств пожаротушения; на складах, послушно перетягивающих грузы; на тротуарах, везущих к вам обед или посылку.

Многие из этих работ просто невозможны без отлаженной системы навигации и ориентации в пространстве. При этом, можно однозначно сказать, что данная задача существенно отличается, в зависимости от того, в помещении ли находится место действия робота.
Если говорить о промышленных объектах, то можно заметить, что здесь наблюдается упрощение задачи. В этом случае, можно разместить некоторое количество маяков, по которым транспортное средство может ориентироваться. Это могут быть светоотражающие метки, линии, разметки на полу, а также магниты. Еще одним элегантным решением, которое может помочь в вопросах перемещения в пространстве транспортного робота является кабель, который вмонтирован в пол здания. Это может решить еще одну проблему – не только помочь сориентироваться роботу, но и подать на него заряд с помощью электромагнитной индукции (рис 1).
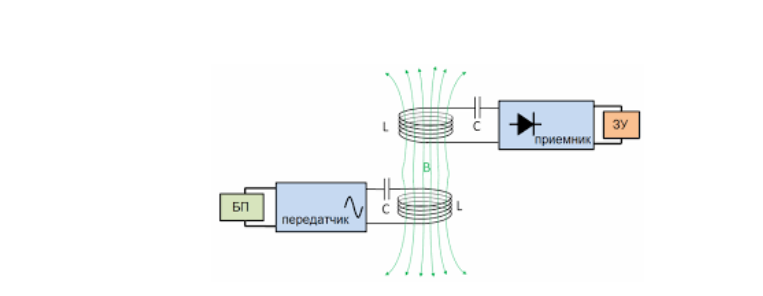
Рис. 1. Принцип беспроводной зарядки.
В частности, подобные системы применяются на заводах и некоторых складах в Германии. Такое решение увеличивает автономность системы в пределах помещения, так как ее маршрут можно проложить таким образом, чтобы его большой отрезок проходил вдоль силового кабеля в течении времени, достаточной для подзарядки.
В условиях помещения роботу часто не нужно знать свое точное положение относительно общего пространства, так как его работа ограничена рамками стен. То есть, глобальные координаты не требуются, нужно только положение прочих объектов, которые находятся в помещении, так как они могут являться препятствиями и помешать выполнению возложенной на робота задачи.
Хуже того, часть препятствий может изменять свое положение. Здесь и передвижение людей, и каких-либо транспортных средств, а также появление новых предметов в отсутствии робота или же в процессе прохождения им маршрута.
Наличие динамической среды существенно осложняет процессы навигации, здесь недостаточно единожды загрузить карту и позволить роботу работать по ней, так как это может привести к помехам в выполнении задания или даже несчастному случаю. По этой причине на технику приходится устанавливать дополнительное оборудование, которое могло бы эффективно распознавать препятствия, возникающие на пути, а также обучать ее находить максимально удобный способ обхода препятствия.
И здесь, опять же, нет единого подхода к решению этой проблемы – в одном случае она упрощается, когда препятствие статично. В другом случае, когда помеха не статична, сложность вычислений существенно возрастает по причине необходимости просчитывать все возможные пути передвижения помехи. Данная задача усложняется, так что часть алгоритмов предполагает решение этой проблемы следующим образом – замереть и ждать, пока препятствие само покинет поле деятельности.
По этому механизму работают, в частности, транспортные роботы на автозаводах, которые в случае с обнаружением на своем пути движение становятся на месте и издают звуковой сигнал, чтобы помеха быстрее ушла с предполагаемого маршрута. В ином случае, на базе анализа отрезка пути объекта двигающегося в поле зрения, система просчитывает возможные варианты и старается под них подстроиться.
В помещении данная задача не так критична, но вне его, когда остановка часто может создать дополнительную угрозу для прочих перемещающихся объектов, она стоит довольно остро и часто является одним из краеугольных камней навигации автопилотов и помощников водителя с разной степенью автономности. Здесь и большая скорость объектов, и их хаотичность ввиду их количества. Проблемы весьма существенны, так как прочие участники движения могут сами создать опасную ситуацию, с вовлечением автономного устройства.
И тут проблема навигации может принять не только физическую, чисто прикладную составляющую, но и морально-этическую, так как часто на дорогах может сложиться ситуация, когда выхода без потерь не будет. Тут можно будет увидеть дилемму вагонетки во всей красе, так как выбор может из следующих вариаций: врезаться в автомобиль, в котором передвигается семья, или же, избежав столкновения, влететь на остановку, на которой ждут автобуса люди. Эта проблема, в достаточной степени, замедляет существенное развитие автопилотов, так как встает вопрос, кто будет отвечать за ущерб, нанесенный транспортным средством, двигающимся автономно. Пока что не существует и развитого правового регулирования. Поэтому навигация автономных технических средств на дорогах общего пользования на постоянной основе невозможна.
В случае с роботами, которые работают в помещении, вопрос навигации является довольно хорошо изученным.
В частности, для решения этой проблемы используются лидары, которые сейчас способны не только обнаруживать объекты в зоне работы системы, но и помогать контролировать скорость объекта, для лучшего маневрирования. Кроме того, они же могут помочь выбрать оптимальное место для установки и проложить наиболее корректный маршрут, в текущих условиях.
Постепенное развитие процесса навигации позволило пройти путь от проводов, до практически полной автономности (ограниченной только мощностью батареи), обеспеченной лидарами, которые могут работать в диапазоне 360⁰. Здесь возможны различные варианты, в зависимости от сложности конструкции. Один из возможных вариантов – использование отражателей, что действительно просто и не требует значительных технических ухищрений. Но, такой подход приносит и дополнительные ограничения – отражатели должны быть видны, иначе система может потерять понимание своего положения в пространстве и сбиться с курса. Это касается и другого метода навигации, когда робот ориентируется посредством видеокамер, направленных на потолок и фиксирующих наличие источников света.
Лидары сейчас являются одним из самых распространённых компонентов для решения проблемы навигации. Они проделали действительно серьезный путь с начала века – ранее они занимали довольно большую площадь и не обладали существенным диапазоном действия, тогда как сейчас он может достигать двухсот метров, что перекрывает потребности для работы внутри помещений. Улучшилась частота испускаемого импульса и точность обработки полученных сигналов. Эти сигналы помогают составлять план местности, которая окружает автономную систему, что позволяет получить представление о положении объектов в пространстве. Они поступают неравномерно, так как встречают преграду на пути, что по их возвращении позволяет создать карту пространства в конкретный момент времени, по которой может двигаться робот. Получить представление о том, как именно робот «видит» окружающее пространство можно ниже (рис. 2).

Рис 2. Один из возможных вариантов представление данных с лидара.
Лидар действительно удобен, он имеет ряд преимуществ по сравнению с такими способами, как стереовидение, одометрия или триангуляция. Но иногда эти методы применяются совместно, с целью исключения возможной ошибки в построении маршрута. Например, даже дорогие лидары могут работать с контрольными точками, в виде отражателей, для того чтобы скорректировать маршрут в процессе продвижения по нему. Это критически важно, если речь идет о перемещении на оживленном складе, где помимо стационарных препятствий присутствуют движущиеся объекты или даже другие роботы, что характерно для многих складских систем Китая, где часто роботы объединены в единую систему, представляющую собой рой, неустанно передвигающийся между рядов (рис. 3).

Рис. 3. Складские роботы компании Alibaba
Естественно, количество роботов на маршруте существенно осложняет задачу навигации, но и ее сейчас удается преодолеть, при помощи развития вычислительных мощностей. Также стало возможным многоуровневое перемещение складских систем, включая перемещение по рядам и в вертикальном измерении.
Технический прогресс значительно увеличил доступность этих систем, так что их можно использовать для решения проблем во множестве ситуаций даже при несколько ограниченном бюджете.
Существующие системы часто используют метод навигации, называемый SLAM (simultaneous localization and mapping). Он предполагает одновременную локализацию и построение карты, что решает проблему перемещения даже в неизвестном пространстве, так как позволяет создать карту помещения в процессе движения, чего ранее не было достигнуто. Но метод не идеален, возможна ошибка перемещения, которая накапливается по ходы выполнения задачи. Сейчас система навигации стала доступна в значительной степени, так как многие из разработок имеют открытый статус и доступны для ознакомления.
Существуют различные библиотеки с принципиальными алгоритмами работы навигационных систем, как и движения автономных комплексов. Здесь можно увидеть, как чисто теоретические изыскания, позволяющие создать эффективные математические модели (MathLab), так и адаптированные под решение практических задач, в частности, инструментарии навигации роботов Университета Карнеги-Меллона (CARMEN) и Инструментарий программирования мобильных роботов (MRPT).
SLAM наиболее распространённый способ навигации, но не единственный. Часто его использование применяют с одометрией или же ультразвуковыми датчиками, так как можно столкнуться с рядом ошибок. В частности, если говорить о перемещении по складу, то робот может не понять, что он вернулся именно в ту точку, с которой отправился. Так же может произойти такая ситуация, когда контуры объектов не замыкаются, так что робот не может найти идеальную траекторию, чтобы их обойти. Это может быть сопряжено с задержкой при движении, а также со столкновением, особенно если объект неоднозначно отражает лазерные лучи.
Таким образом, проблема навигации до сих пор остается действительно важной и требует дальнейшего исследования и комплексного подхода, так как цена ошибки может быть довольно большой, а существующие системы не всегда могут уверенно справляться со сложными ситуациями. В частности, подобное привело к осмысленному отказу от лидаров в TESLA, где отдали предпочтение системам компьютерного зрения с помощью видеокамер. Развитие продолжается, возможно, с появлением более совершенного искусственного интеллекта и более эффективных нейросетей, а также закрытием пробелов в законодательстве, можно ожидать появление полностью автономных систем и на дорогах.
Многие из этих работ просто невозможны без отлаженной системы навигации и ориентации в пространстве. При этом, можно однозначно сказать, что данная задача существенно отличается, в зависимости от того, в помещении ли находится место действия робота.
Если говорить о промышленных объектах, то можно заметить, что здесь наблюдается упрощение задачи. В этом случае, можно разместить некоторое количество маяков, по которым транспортное средство может ориентироваться. Это могут быть светоотражающие метки, линии, разметки на полу, а также магниты. Еще одним элегантным решением, которое может помочь в вопросах перемещения в пространстве транспортного робота является кабель, который вмонтирован в пол здания. Это может решить еще одну проблему – не только помочь сориентироваться роботу, но и подать на него заряд с помощью электромагнитной индукции (рис 1).
Рис. 1. Принцип беспроводной зарядки.
В частности, подобные системы применяются на заводах и некоторых складах в Германии. Такое решение увеличивает автономность системы в пределах помещения, так как ее маршрут можно проложить таким образом, чтобы его большой отрезок проходил вдоль силового кабеля в течении времени, достаточной для подзарядки.
В условиях помещения роботу часто не нужно знать свое точное положение относительно общего пространства, так как его работа ограничена рамками стен. То есть, глобальные координаты не требуются, нужно только положение прочих объектов, которые находятся в помещении, так как они могут являться препятствиями и помешать выполнению возложенной на робота задачи.
Хуже того, часть препятствий может изменять свое положение. Здесь и передвижение людей, и каких-либо транспортных средств, а также появление новых предметов в отсутствии робота или же в процессе прохождения им маршрута.
Наличие динамической среды существенно осложняет процессы навигации, здесь недостаточно единожды загрузить карту и позволить роботу работать по ней, так как это может привести к помехам в выполнении задания или даже несчастному случаю. По этой причине на технику приходится устанавливать дополнительное оборудование, которое могло бы эффективно распознавать препятствия, возникающие на пути, а также обучать ее находить максимально удобный способ обхода препятствия.
И здесь, опять же, нет единого подхода к решению этой проблемы – в одном случае она упрощается, когда препятствие статично. В другом случае, когда помеха не статична, сложность вычислений существенно возрастает по причине необходимости просчитывать все возможные пути передвижения помехи. Данная задача усложняется, так что часть алгоритмов предполагает решение этой проблемы следующим образом – замереть и ждать, пока препятствие само покинет поле деятельности.
По этому механизму работают, в частности, транспортные роботы на автозаводах, которые в случае с обнаружением на своем пути движение становятся на месте и издают звуковой сигнал, чтобы помеха быстрее ушла с предполагаемого маршрута. В ином случае, на базе анализа отрезка пути объекта двигающегося в поле зрения, система просчитывает возможные варианты и старается под них подстроиться.
В помещении данная задача не так критична, но вне его, когда остановка часто может создать дополнительную угрозу для прочих перемещающихся объектов, она стоит довольно остро и часто является одним из краеугольных камней навигации автопилотов и помощников водителя с разной степенью автономности. Здесь и большая скорость объектов, и их хаотичность ввиду их количества. Проблемы весьма существенны, так как прочие участники движения могут сами создать опасную ситуацию, с вовлечением автономного устройства.
И тут проблема навигации может принять не только физическую, чисто прикладную составляющую, но и морально-этическую, так как часто на дорогах может сложиться ситуация, когда выхода без потерь не будет. Тут можно будет увидеть дилемму вагонетки во всей красе, так как выбор может из следующих вариаций: врезаться в автомобиль, в котором передвигается семья, или же, избежав столкновения, влететь на остановку, на которой ждут автобуса люди. Эта проблема, в достаточной степени, замедляет существенное развитие автопилотов, так как встает вопрос, кто будет отвечать за ущерб, нанесенный транспортным средством, двигающимся автономно. Пока что не существует и развитого правового регулирования. Поэтому навигация автономных технических средств на дорогах общего пользования на постоянной основе невозможна.
В случае с роботами, которые работают в помещении, вопрос навигации является довольно хорошо изученным.
В частности, для решения этой проблемы используются лидары, которые сейчас способны не только обнаруживать объекты в зоне работы системы, но и помогать контролировать скорость объекта, для лучшего маневрирования. Кроме того, они же могут помочь выбрать оптимальное место для установки и проложить наиболее корректный маршрут, в текущих условиях.
Постепенное развитие процесса навигации позволило пройти путь от проводов, до практически полной автономности (ограниченной только мощностью батареи), обеспеченной лидарами, которые могут работать в диапазоне 360⁰. Здесь возможны различные варианты, в зависимости от сложности конструкции. Один из возможных вариантов – использование отражателей, что действительно просто и не требует значительных технических ухищрений. Но, такой подход приносит и дополнительные ограничения – отражатели должны быть видны, иначе система может потерять понимание своего положения в пространстве и сбиться с курса. Это касается и другого метода навигации, когда робот ориентируется посредством видеокамер, направленных на потолок и фиксирующих наличие источников света.
Лидары сейчас являются одним из самых распространённых компонентов для решения проблемы навигации. Они проделали действительно серьезный путь с начала века – ранее они занимали довольно большую площадь и не обладали существенным диапазоном действия, тогда как сейчас он может достигать двухсот метров, что перекрывает потребности для работы внутри помещений. Улучшилась частота испускаемого импульса и точность обработки полученных сигналов. Эти сигналы помогают составлять план местности, которая окружает автономную систему, что позволяет получить представление о положении объектов в пространстве. Они поступают неравномерно, так как встречают преграду на пути, что по их возвращении позволяет создать карту пространства в конкретный момент времени, по которой может двигаться робот. Получить представление о том, как именно робот «видит» окружающее пространство можно ниже (рис. 2).
Рис 2. Один из возможных вариантов представление данных с лидара.
Лидар действительно удобен, он имеет ряд преимуществ по сравнению с такими способами, как стереовидение, одометрия или триангуляция. Но иногда эти методы применяются совместно, с целью исключения возможной ошибки в построении маршрута. Например, даже дорогие лидары могут работать с контрольными точками, в виде отражателей, для того чтобы скорректировать маршрут в процессе продвижения по нему. Это критически важно, если речь идет о перемещении на оживленном складе, где помимо стационарных препятствий присутствуют движущиеся объекты или даже другие роботы, что характерно для многих складских систем Китая, где часто роботы объединены в единую систему, представляющую собой рой, неустанно передвигающийся между рядов (рис. 3).
Рис. 3. Складские роботы компании Alibaba
Естественно, количество роботов на маршруте существенно осложняет задачу навигации, но и ее сейчас удается преодолеть, при помощи развития вычислительных мощностей. Также стало возможным многоуровневое перемещение складских систем, включая перемещение по рядам и в вертикальном измерении.
Технический прогресс значительно увеличил доступность этих систем, так что их можно использовать для решения проблем во множестве ситуаций даже при несколько ограниченном бюджете.
Существующие системы часто используют метод навигации, называемый SLAM (simultaneous localization and mapping). Он предполагает одновременную локализацию и построение карты, что решает проблему перемещения даже в неизвестном пространстве, так как позволяет создать карту помещения в процессе движения, чего ранее не было достигнуто. Но метод не идеален, возможна ошибка перемещения, которая накапливается по ходы выполнения задачи. Сейчас система навигации стала доступна в значительной степени, так как многие из разработок имеют открытый статус и доступны для ознакомления.
Существуют различные библиотеки с принципиальными алгоритмами работы навигационных систем, как и движения автономных комплексов. Здесь можно увидеть, как чисто теоретические изыскания, позволяющие создать эффективные математические модели (MathLab), так и адаптированные под решение практических задач, в частности, инструментарии навигации роботов Университета Карнеги-Меллона (CARMEN) и Инструментарий программирования мобильных роботов (MRPT).
SLAM наиболее распространённый способ навигации, но не единственный. Часто его использование применяют с одометрией или же ультразвуковыми датчиками, так как можно столкнуться с рядом ошибок. В частности, если говорить о перемещении по складу, то робот может не понять, что он вернулся именно в ту точку, с которой отправился. Так же может произойти такая ситуация, когда контуры объектов не замыкаются, так что робот не может найти идеальную траекторию, чтобы их обойти. Это может быть сопряжено с задержкой при движении, а также со столкновением, особенно если объект неоднозначно отражает лазерные лучи.
Таким образом, проблема навигации до сих пор остается действительно важной и требует дальнейшего исследования и комплексного подхода, так как цена ошибки может быть довольно большой, а существующие системы не всегда могут уверенно справляться со сложными ситуациями. В частности, подобное привело к осмысленному отказу от лидаров в TESLA, где отдали предпочтение системам компьютерного зрения с помощью видеокамер. Развитие продолжается, возможно, с появлением более совершенного искусственного интеллекта и более эффективных нейросетей, а также закрытием пробелов в законодательстве, можно ожидать появление полностью автономных систем и на дорогах.
Комментарии (8)

R7R
23.07.2022 18:31Роботов можно увидеть… везущих к вам обед или посылку.
Надеюсь, что где-то их таки можно увидеть.
А так, даже в очень крупных городах — вижу только стайки вело или мото курьеров с огромными коробами за плечами.

krote
25.07.2022 10:26По поводу дизайна робота как на картинке. Я как увидел меня сразу заинтересовало не соблазняет ли такая удобная крышка к примеру детей или просто странных личностей на него присесть?
Я понимаю конечно что может там включается какой то звуковой отпугиватель/сирена... (или нет?) но ведь это уже постфактум, что явно не на пользу этим дорогим вездеходам.
R7R
25.07.2022 20:27не соблазняет ли такая удобная крышка к примеру детей или просто странных личностей на него присесть?
В нашем детстве любимым фильмом был фильм «Четыре танкиста и собака».
Не знаю, как современные дети, но мы бы этот танк, что на КПДВ — точно бы подбили :)
AndreyDmitriev
Года четыре назад занесла меня командировка на один завод в баварской глубинке для модернизации нескольких систем нерзрушающего контроля, и я заметил, как группа молодых ребят возилась в сторонке с чудом техники, примерно вот с таким погрузчиком:
(фото не конкретно того, что я видел - мне нельзя было фоткать, но по сути похоже) Суть в том, что детали между участками производства перемещались не только по конвейерам, но и при помощи вилочных погрузчиков и этаких "мини-поездов" (управляемых вручную). Я поинтересовался, как они собираются навигироваться в цехах и будут ли штробить пол для кабелей, на что они сказали - нет, никаких маяков, только хардкор и хайтек - лидары, камеры, сенсоры и искусственный интеллект до кучи. "Ну, удачи" - сказал я. Года два назад я снова был на этом заводе, чудо-погрузчики, обвешанные сенсорами и мигающие как новогодние ёлки, таки да, неспешно перемещались по цеху (зрелище футуристическое). Я поинтересовался у начальника смены - он мне сказал, что большей головной боли у них давно не было. Во-первых пусконаладка заняла у ребят больше года, производительность даже упала, поскольку ездят они примерно втрое медленнее, чем вилочные погрузчики, управляемые человеком, кроме того время от времени они "встают колом" и надо исполнить танец с бубном, чтобы оно поехало дальше. Вообще то, что нам показывают - обычно "тепличные условия" чистого сборочного цеха или склада, но реальный литейный цех - он чуть иначе выглядит и там задача полностью автономной навигации становится весьма нетривиальна, если отказаться от простейшего подхода езды над кабелем с остановками по маякам и центральным управлением. Я это к тому, что ажиотаж и эйфория вокруг "Индустрии 4.0" несколько меркнут, если спуститься с небес на землю. И хотя технический прогресс, конечно, на месте не стоит, но возрастающая сложность иногда работает против нас, и процесс внедрения в производство бывает весьма болезненный.
vagon333
Перестройка под роботизацию требует комплексный подход: склады хранения, методы загрузки выгрузки, идентификация и учет товаров.
Взять ваш погрузчик - если использовать его на грунтовой почве, он даже не сдвинется с места.
Т.е. перестраивать под роботизацию нужно комплексно.
R7R
Ох… с 1987 года практически ничего не изменилось :)