В комментариях люди высказывали свои предположения о причинах подобной ситуации, ну и кто то предлагал идеи того, как это можно исправить.
Ну а я, как инженер, не мог пройти мимо этой ситуации и предлагаю свою «методу» решения этой проблемы… Real WarBots (да, заодно здравствуйте, мы компания Cygob)

Однако вернемся на 30+ лет назад, когда примерно та же проблема была у персональных компьютеров.
Ведь в свое время компьютеры тоже были шибко дорогой штукой со спорной полезностью. Даже были заявления типа «Компьютеры для простых людей не нужны»…
Однако сейчас компьютеры есть, чуть ли не в каждом доме. Но как они стали популярны? Как мне видится «виновны» в этом развлечения, ну и игры в частности. Ибо такова человеческая психология, все что добавляет веселья неизменно привлекает внимание.
Были ли это студенты заходящие на кафедру и рубившиеся в Castle Wolfenstein или много позже молодой я видевший первые Fallout, все неизменно хотели получить тоже самое у себя дома. Ну и рано или поздно получали.
Да и сейчас во многом двигатель прогресса компьютерного железа, это именно игры. Ибо офисным служащим крутое железо не нужно, а 3д моделлеров и других специфических профессионалов просто слишком мало.
Вот и получив данные тезисы, мы применили их к робототехнике.
Итак, представляю вам Real WarBots.
Real WarBots это стратегическая игра для двух и более игроков, где полем битвы является не экраны компьютеров, а комнаты в ваших домах. Воевать же будут настоящие роботы, с реальными снарядами.
Цели игры повторяют механику компьютерных стратегий в реальном времени. Так же как и там игроку предстоит разведать «карту», собрать ресурсы, защитить базу и уничтожить противника
Однако это роботы, а значит и управление ими отличается от стандартного.
Игрок в стратегические игры постоянно, осознанно или нет, собирает у себя в голове своеобразный «алгоритм действий». Что то вроде: «эти войска должны отправится вот сюда, этот отряд отвлекает противника вот здесь, а в это время собираем ресурсы вот отсюда».
Примерно тоже самое мы вводим и в непосредственное управление роботами. Игрок должен собрать алгоритм действий для робота из простейших блоков, каждый из которых отвечает за какое то отдельное действие — стрельба, движение, повороты и тому подобное. После этого, алгоритм отправляется по беспроводной связи на робота, и тот начинает выполнять свою задачу. А если ситуация на поле боя меняется игрок составляет новый алгоритм, отправляет его на робота и тот начинает действовать по новому. Подобное управление позволяет оперировать большим количеством роботов, битвы между парой десятков машин не проблема, само собой при их наличии.
Сложность алгоритма
Игрок волен составлять алгоритмы различной сложности. Кто то будет собирать их множество и простеньких, созданных буквально в пару кликов, и постоянно отправлять новые задачи на роботов, что даст игроку возможность оперативно реагировать на обстановку. Своеобразный микроменеджмент.
Другой же игрок посидит какое то время до игры, и составит огромный нелинейный алгоритм из тысяч блоков с циклами и условиями, по сути создаст своеобразный упрощенный искусственный интеллект, а на самой игре, загрузив его в роботов, попивая чай будет наблюдать за ничего не понимающим оппонентом, который теряет свои войска.
Ну или нет, если где то ошибется или просчитается, и уже сам будет напряженно искать выход из ситуации.
Нюансы
Передача алгоритма на робота происходит не мгновенно. Есть небольшая задержка между передачей алгоритма и началом его выполнения.
С одной стороны это обеспечивает невозможность прямого управления роботами и заставляет игроков заранее продумывать свои действия, а с другой добавляет напряженности игре, ведь иногда нужно срочно изменить или поправить алгоритм, а потом придется судорожно считать секунды до момента начала его выполнения, в то время как противник выполняет свой план.
Интерфейс
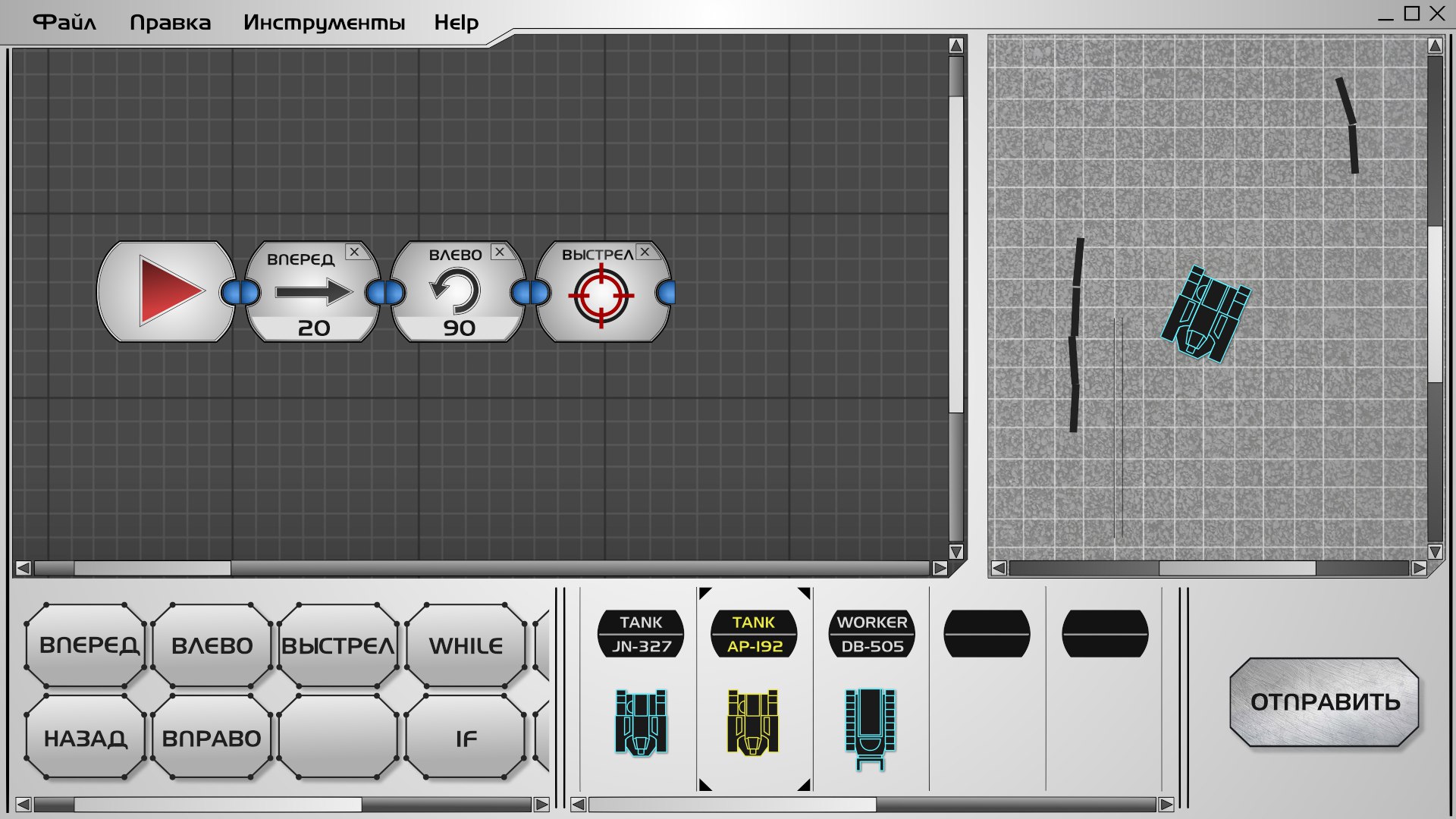
Для управления роботами игрокам дается программная среда.
Условно ее можно разделить на несколько зон. Рабочую зону, где создается алгоритм из различных блоков. Карту, где показывается какие препятствия видят роботы вокруг себя. Так же есть список кнопок обозначающих программные блоки и список тех роботов, которые есть у игрока. У каждого робота будет свой уникальный идентификационный номер, часть которого так же будет отображаться в этом списке. Ну и большая кнопка отправить, которая отправляет собранный алгоритм, на того робота, который выделен в списке.
В данный момент она работает на компьютерах, позже перенесем ее на iOS/Android
Карта
Роботы имеют ультразвуковые датчики препятствий и все что они видят, вырисовывается на карте в интерфейсе игрока. Это позволяет оценивать расстояния между роботом и окружающими его объектами и выставлять параметры в блоках передвижения не «на глаз», а с определенной точностью. Кроме того, это позволяет оценивать есть ли препятствия на пути робота там, где сам человек уже не имеет физической возможности видеть «ландшафт», например, если робот заехал за какое-то кресло, или вообще выехал в другую комнату.
Возможность играть «в слепую», не корректируя то, что видят датчики робота с тем, что видит сам человек, добавят интереса к игре, хотя и повысят ее сложность, а значит, это рекомендуется делать более опытным игрокам.
Кроме того очевидно, что с увеличением количества роботов, а значит и расширением размеров помещения для игры, увеличится количество «слепых пятен» для человека – зон, которые его личное зрение уже не охватывает и там все равно придется полностью полагаться на датчики роботов.
Препятствия на карте, за исключением других роботов, обозначаются простыми черточками достаточными, что бы понять, что робот там не проедет. Другие же роботы обозначаются своими иконками, дабы отличать противника от допустим стены

Персонификация
У настольных варгеймов существует возможность персонифицировать своих юнитов. Обычно настольные фигурки разукрашивает, а зачастую и модифицирует сам игрок, а значит для него данный конкретный «солдатик» становится не просто еще одним безликим юнитом в армии. Он имеет какие то отличия от всех остальных. И позже, если он смог во время игры совершить что-то мало возможное, именно этот солдатик остается надолго в памяти у игрока. Так как с ним связана какая то история, а вместе с историей связаны эмоции, в общем-то, и привлекающие людей в настольные игры.
Так почему бы не добавить подобный элемент к нашим роботам?
Итак. У каждого робота, будет свой идентификационный номер, забиваемый сразу «на заводе» и не меняющийся никогда. По сути, каждый робот будет уникальным, со своим собственным именем.
Это позволит персонифицировать каждого робота, и на вопрос «И какой из роботов у тебя сделал этот выстрел?», вы уже не будете неопределенно отвечать «Ну вон тот…», а сможет с гордостью сказать «Это мой 313-ый, он никогда не мажет!»
Победы каждого робота на официальных турнирах будут записаны в зал славы Real WarBots, так что у всех будет возможность сравнить кто круче.
Герои
Рпг элементы в настоящее время присутствуют, чуть ли не в каждой первой игре. Это и понятно, наблюдать за «прокачкой» своих войск/персонажей/зданий всегда крайне увлекательно.
Как же можно ввести подобные элементы к нашим роботам?
Ну во первых самое очевидное. Робот-танк при уничтожении чужих роботов, получает очки опыта которые игрок может потратить на…на что? Легче всего, добавить роботу очков жизней. Чем больше попаданий сможет выдержать танк, тем больше полезного он успеет сделать перед жизнью. Далее можно уменьшать время паузы между получением роботом алгоритма и началом его выполнения. (Вы ведь помните, что алгоритм начинает выполняться не мгновенно?) Возможно даже введение «героического режима» — режима с прямым управлением робота, как у машинок с радиоуправлением… но этот вариант может сломать игру.
Далее, возможны отдельные роботы-герои. На другой платформе, с другим железом.
Там уже можно ввести усиленную «прокачку». Кроме стандартного увеличения очков жизни, сделать возможность ускорения передвижения робота. Возможно добавить съемные модули, с увеличенным количеством орудий, или даже поворотной башней. Да и саму форму робота можно поменять, делать уже не танковую платформу, а гексапода – робота с несколькими ногами.
Сообщество.
Для проектов подобных нашему важной частью является поддержка и развитие игрового сообщества.
Для привлечения внимания новых людей, а также внесения спортивного элемента для опытных игроков, будут организовываться турниры. Форматы проведения турниров со временем, и исходя из практики, конечно будут расширяться, но уже сейчас понятны основные режимы: битва между двумя игроками с использованием небольшого количества роботов, и массовые бои сразу для нескольких человек и большого количества роботов. Второй режим хоть и требователен к размеру площадки для боя, но зато должен быть наиболее зрелищен и разнообразен со стратегической точки зрения.
При этом в обоих этих режимах игроки смогут проявить себя, как и с точки зрения своих тактических/стратегических талантов, так и в умении составлять алгоритмы для роботов. В тоже время никуда не денется элемент случайности, ведь наши роботы реальны, а значит, срикошетивший снаряд может поставить крест даже на, казалось бы, идеальном алгоритме. Если только игрок не сможет учесть подобные случайности и свести их влияние к минимуму, что опять таки зависит от его опыта и мастерства.
Очень важно поддерживать общение между игроками, соответственно на нашем сайте будет организован форум. Там игроки смогут обмениваться своим опытом, идеями для алгоритмов, договариваться об играх и т.п. Ну и естественно, там игроки смогут предлагать свои идеи разработчикам. Новые роботы, новые режимы, улучшение игрового интерфейса, все, что может помочь сделать отличное хобби.
Ну и игровые выставки забывать тоже не будем, вещь забавная и полезная.
Ну и надо наверно добавить видео с нашими роботами… точнее небольшой отрывок нашего будущего видео
В общем… такова наша идея, прошу оценивать.
Наша группа Вконтакте где то тут vk.com/realwarbots
Ну и да, через пару дней выходим с этим всем на Kickstarter, так что прошу всех, кому нравятся стратегии, либо кто радеет за робототехнику, либо кто просто ненавидит своего кота и ищет новые способы издевательства над ним, подписаться на наши группы, чтобы не пропустить запуск, и поддержать нас рублем и репостом.
Комментарии (72)

MikhailD
17.10.2016 18:50Очень хорошая идея! Сам придумал что-то подобное уже давно, даже сделал небольшой прототип, но дальше дело не пошло.
Скажите, как у вас реализовано фиксирование попадание по роботу?Rollon
17.10.2016 19:18Пьезодатчики простые. При достаточной настройке позволяет отслеживать попадания по корпусу, при этом не получая помех от допустим движения

extempl
17.10.2016 22:16А если в стенку врезаться с разгона? Или в любое другое препятствие.
Rollon
17.10.2016 22:20тогда возможно срабатывание, это верно. Однако тут опять таки вопрос настроек, ну и программной защиты от ложных срабатываний. (например, если никто не стрелял, а датчик сработал, значит срабатывание ложное)

Captain_Sparrow
18.10.2016 11:08Для роботов так же критичны сильные удары об поверхности. Сколько зондов отдали свою электронную душу звездам из-за жестких посадок на поверхность планет/спутников… Так что оставить всё как есть — тоже хороший вариант.

5oclock
17.10.2016 18:52+2Я от леговского майндстормовского языка программирования недоумеваю: почему нельзя было сделать среду программирования основанную на чём-то вроде Scratch?!
И тут то же эти дурацкие «гусеницы из блоков».
Какое отношение они имеют к программированию?
«Больших», промышленных роботов так программируют что-ли?Rollon
17.10.2016 19:21" на чём-то вроде Scratch?!" как по мне менее наглядная штука…
«Какое отношение они имеют к программированию?
«Больших», промышленных роботов так программируют что-ли?» а у нас должно быть как в больших роботах? Зачем?5oclock
17.10.2016 22:40Ну вот какая цель всех этих затей? Приобщить народ, молодёжь, детей к программированию? Ну или хотя бы познакомить с азами?
А что конструирование алгоритма в mindstorm, что в изложенной системе — никак не знакомит с реальным программированием. Я за 20 лет программирования с такой хренотенью первый раз встретился именно у Лего. Сильно удивился, что за чушь им National Instruments сделали, поплевался и «переделал» «кирпич» на RobotC.
А вот Scratch мне понравилась тем, что во-первых структурно — это вполне себе язык программирования. Алголоподобный наверное.
Во-вторых, там в простом и понятном вообще реализована событийная модель современных систем UI.Rollon
17.10.2016 22:49-1«Ну вот какая цель всех этих затей? Приобщить народ, молодёжь, детей к программированию? Ну или хотя бы познакомить с азами?»
Вообще ни разу. Цель создать новое хобби для любителей стратегических игр.
Детей конечно можно… ознакомить, с алгоритмами, но это вторично
rstepanov
18.10.2016 14:01Мне всякие скретчи раньше были глубоко фиолетовы, а вот теперь ребенок дорос до уроков информатики в школе и мне пришлось ему слегка помочь с программой ЛогоМиры. Такого адского ада я давно не видел, очень сильно опасаюсь, что мозг ребенка необратимо пострадает. Поэтому на мой взгляд чем ближе к реальным языкам программирования — тем лучше. Пусть лучше будет похоже на скретч, чем кубики и стрелочки…
Rollon
18.10.2016 14:09И еще раз говорю. Наш проект не для обучения детей программированию.
С другой стороны, помню как мне преподавали блок схемы. И это было очень полезно. В нашем проекте по сути эти блок схемы и рисуются.
5oclock
17.10.2016 22:51Fix:
Во-вторых, там в простом и понятном ВИДЕ реализована событийная модель современных систем UI.lingvo
18.10.2016 10:48У меня вообще вызывают глубокие опасения реализации событийных моделей в системах реального времени. Это большое заблуждение IoTшников.

cattheblack
18.10.2016 11:00Зависит от реализации. Если грамотно реализована машина состояний с переходами по трансляции событий — проблем быть не должно, а вот если вешать обработку событий отдельно, да Time critical — уже грустно.
5oclock
18.10.2016 11:25А в user interface никакого реального времени и не предполагается:)
lingvo
18.10.2016 11:44+1Ну да, только до тех пор, пока по команде «Проехать 2м и остановиться» ваш робот не будет проезжать… 3 метра… А в следующий раз… 1,5 метра. Просто потому, что вдруг пришло 100 Bluetooth запросов и событие от таймера слегка задержалось в операционке…
5oclock
18.10.2016 12:24Это не UI.
UI — это «нажата кнопка», «прокрутили список», «нажали правую кнопку мыши».
cattheblack
18.10.2016 11:12Знаете, это позволяет визуально проследить диаграмму состояний и ветвления алгоритма, воспринимать алгоритм в наиболее понятной неподготовленному человеку форме. Вы ведь диаграммы состояний больших да распределённых систем не в текстовом виде делаете?
А этот ваш скретч — тот же текстовый язык, только с цветным фоном, если в общем смотреть.
По большому счёту, мне кажется, хороший программист — это тот, кто может придумать хороший алгоритм для реализации задачи, а не тот, кто знает много названий функций. Мы же не про «простокодеров» говорим? Грамотный специалист более-менее свободен в выборе инструментов, а начала алгоритмов проще и понятнее изучать визуально, мне кажется, чем этим абстрактным текстом.
И да, управление системой в реальном времени несколько отличается от написания UI.
P.S.> Чего я только не программировал «так», включая роботов и промышленные установки ;)5oclock
18.10.2016 11:31Так дело в том, что эта «гусеница» — это и не диаграмма состояний.
Это… даже не знаю как назвать. Просто другая визуализация потока выполнения программы. Совершенно непривычная для программиста, работавшего с обычными средами программирования. Где — да, всё текстовое.
Вот раз Вы упомянули программирование промышленных роботов — Вам вопрос (сам я с этим не сталкивался): среды для этого рода программирования так и выглядят?
Иначе я вообще не знаю чем объяснить такой подход NI в Lego Mindstorm.lingvo
18.10.2016 11:48Погуглите IEC61131-3 и среды программирования для него — CodeSys, TwinCAT. Так программируют промышленных роботов, где не требуется супербыстродействие, но требуется четкий real-time и гибкость программы.
Для космических роботов, авиоционных систем управления, где частые изменения программы не требуются, но алгоритм должен быть отлажен на все 100% и ессно — real-time и достаточно шустрым используется Model-Based Design — продукты Matlab Simulink или Stateflow.
NI Labview и иже с ними находятся где-то посередине.
cattheblack
18.10.2016 12:03Ну, думаю, это визуальная развёртка алгоритма с наглядным представления работы, скажем так. «На этом ветвлении пошли по этой ветке и остались в том цикле, затем сработало вон то условие выхода». Получается работа по принципу потока данных, он же задаёт последовательность действий, синхронизацию и тактирование. Мне кажется, это не другая, а просто визуализация. Вы ведь в голове, а не в коде, алгоритм представляете древовидной или даймонд-структурой, не текстом? Когда в общем виде, без конкретики реализации.
Ведь среда (подпустим пафоса) лишь инструмент Творца, привязывать к ней алгоритм — это ограничение. Она нужна на этапе реализации.
А среды разные, многие пишут на C-образном, я пользуюсь пресловутым LabVIEW от National Instruments. Для меня он оптимальный по соотношению время/простота реализации сложных алгоритмов/качество кода. К тому же он заточен на написание параллельных синхронных/асинхронных алгоритмов, работу с промжелезом, матобработку сигналов, реальное время и т.д. В условиях отсутствия жёстких лимитов по вычмощностям и памяти — всё просто (хотя там вменяемые возможности по оптимизации), если ограничения драконовские — там уже, конечно, нужно изворачиваться или переходить на уровень ниже (C, asm), но это редкость. Плюс единообразие программирования ПЛИС и обычных контроллеров — тоже удобно. По концепции напоминает разводку платы, весьма наглядно. Да и машину состояний на сотню позиций, с распараллеливанием, синхронизацией, допустим, матмодели и реальности, визуально делать проще, чем текстом. А потом отлаживать — тоже удобно. Оно как-то интуитивнее получается.
Его минус — он платный (хотя, хммм, свободный обмен информацией никто не отменял), да переучиваться на принцип потока данных после C — затрата времени. А «по-старому» писать неоптимально и небезопасно может выйти.
Но вообще, конечно, пишут кто на чём привык ;)
Так что, если человек знает алгоритмику и уже привык к текстовому языку — он на нём эффективнее, особенно в краткосрочной перспективе, а вот если он пока не программист, но хочет понять логику алгоритмов, причинно-следственные цепочки в них и прочее — тогда визуальщина, мне кажется, лучше.
Да, я не конкретно роботами занимаюсь, а, в основном, автоматизацией экспериментальных несерийных установок, измерительных комплексов и прочего подобного.
cattheblack
18.10.2016 12:19Да, такими роботами, которых упоминал lingvo я не занимался, моё упущение, спасибо, кстати, за кругозор. Век живи — уже хорошо ;) Но то, где сталкивался (несерийные вещи) — там такого не применяли. Так что именно в обычных промроботах я дилетант ;) RTOS да C всякие видел. Но там нужны были точность и быстродействие, возможно, поэтому.
lingvo
18.10.2016 13:21Сейчас вообще для разработки систем управления реального времени выгоднее брать не программистов, а тех, кто именно разбирается в объекте управления, немножко поднатаскав их по автоматической генерации кода. Контроллер у них получается гораздо быстрей и качественней и для процессоров и для ПЛИСов.
cattheblack
18.10.2016 13:47Ну, если в общем — у нас такая фигня и происходит :) АСУ-шники мы, если по специальности. Хотя программить умеем не только в разрезе СУ.
mantiss81
17.10.2016 19:21+2а как попадание отслеживаться будет? и выстрел что один? и вообще, может эмулятор есть? а то мне кажется, что это все вразнобой будет слепо тыкаться в углы и никуда не попадать
Rollon
17.10.2016 19:23Пьезодатчики простые. При достаточной настройке позволяет отслеживать попадания по корпусу, при этом не получая помех от допустим движения…
Выстрелов у пушки будет несколько. Там что то типо обоймы. Сколько именно на данный момент сказать не могу, но думаю что то в пределах 3-5
Про слепо тыкаться в углы… ну тут уже зависит от игрока, насколько верно он составит алгоритм. И эмулятора соответственно нет

celen
18.10.2016 00:07+1Кот, конечно, супербосс карты.
Вам нужно добавить на машинки некие индикаторы очков здоровья, явно видные при взгляде на машинку, типа светодиодиков, который горит зеленым обычно и красным если машинка подбита. А то зубочистка как-то несолидно по корпусу попала.Rollon
18.10.2016 03:32лампочки есть, просто качество видео не очень, не видно(
Но индикаторы конечно будут

RusikR2D2
18.10.2016 00:16А вот меня идея с «программированием» как-то отталкивает. — уж слишком похоже на «самые крутые» браузерные игрушки с дуэлями на таком же принципе (или чуть проще) — когда задается набор действий для человечка (типа ударить снизу, сделать блок, ударить ногой и т.д), а потом они «дерутся»
Rollon
18.10.2016 03:35даже не представляю как вы то, с этим связали…
все таки там «Камень-ножницы-бумага», а у нас как бы полная «свободна мысли». Да и реальное время опять таки
andrey_aksamentov
18.10.2016 04:43То есть нельзя управлять напрямую? Только заранее программировать движения? Но ведь это примитивно и уже давно придумано.
Rollon
18.10.2016 06:41то есть управлять напрямую было бы не примитивно?
Все было кем то придумано, а реализация есть?andrey_aksamentov
18.10.2016 06:46+1Управлять напрямую с компьютера, имея интерфейс и обратную связь, не думаю что примитивно.
А вот программируемые игрушечные машинки, видел еще в 90тых годах. Например Электроника ИМ-11.Rollon
18.10.2016 06:55дык это же простые машинки на радиоуправлении, не?
Да, были такие, вот только там реализация все таки другая, да и в полноценное хобби ту штуку не превратишь. У нас же геймплей комплексный, расширяющийся.
Hellsy22
18.10.2016 08:43+1Обозначенная в начале поста задача не решается таким путем — это еще одно нишевое решение, интересное крайне узкой прослойке пользователей. Обычным геймерам оно не интересно — слишком все медленно, сложно и не решается никакая задача, которая бы не могла решиться «виртуально». Программистам тоже как бы не очень интересно в силу чудовищной примитивности.
Отдельное «фи» за ультразвуковые сенсоры. Они-то и по одиночке-то работают так себе, а уж когда на квадратном метре есть три машинки с ультразвуком, количество ложных срабатываний будет крайне высоким.Rollon
18.10.2016 09:35Не согласен. Оно конечно да, нишевое решение, однако геймеров очень большое число само по себе, а тех кто любит когда «медленно и сложно» так же достаточно большое число. А когда по миру у тебя тысяч сто таких игроков, то и получается, что роботы займут вполне себе постоянное место в жизни этих людей… и их ни разу не мало. Так оно и решается.
Ложные срабатывания ведь можно отфильтровывать, не так ли? При том, способов у нас больше чем обычно, потому что мы знаем где находится тот или иной робот в любой момент… ибо все его телодвижения во первых задаются нами, во вторых на карте отображаются.
Другой вопрос, что фильтрация это ни разу не простой процесс, я согласенHellsy22
18.10.2016 10:14+1А когда по миру у тебя тысяч сто таких игроков, то и получается
… очередной конструктор. Я не против конструкторов. Мне лишь не нравится пафос типа «мы нашли решение как сделать роботов массовым явлением!».
Ложные срабатывания ведь можно отфильтровывать, не так ли?
Ценой скорости. Т.е. делается 7+ измерений, берется медиана, в случае слишком большого разброса значений все измерения повторяются. В случае ультразвука это весьма неспешная процедура, поскольку существует проблема эхо — т.е. сигнал переотразившись от стенки вернется и попадет уже на следующий замер.
ИК-сенсоры стоят немногим дороже (~4$ против 1$), но решают огромное количество проблем.Rollon
18.10.2016 10:22Нууу… не совсем конструктор, у нас попроще. А на счет пафоса, я действительно считаю, что это сможет стать началом распространения роботов среди простых людей. Конечно, если все получится.
Вот только у ИК-сенсоров свои проблемы есть… на самом деле на «разведчике» у нас будут и ИК сенсоры, и ультразвук, дабы первоначальная постройка карты была наиболее точной. На других роботах уверен, что сможем справиться, одним ультразвуком.(плюс ИК приемники простые)

shasoft
18.10.2016 09:41Было нечто подобное про гонки https://habrahabr.ru/post/146321/, но без программирования.
Лучше, ИМХО, все-таки реальное управление роботом. Этакие танки online но с реальными танками.Rollon
18.10.2016 09:46тогда действительно возникает справедливый вопрос… зачем нужны танки онлайн с реальными танками, если есть просто танки онлайн?
kulikovDenis
18.10.2016 11:02online управление реальными танками — это огромные возможности, во первых, многопользовательский режим, во вторых, это элементарно демонстрация работы игрушек, что поддерживает традиционные продажи.
в третьих, это возможность в будущем масштабировать игрушки вплоть до реальных прототипов, и уже обкатывать решение реальных задач.
в четвертых, покупать подобные игрушки домой, как правило не целесообразная трата денег, в моем доме с маленькими детьми, игрушки на радио управление живут максимум пару месяцев.
в пятых, для увлечение игрой необходим прогресс, динамика, легкий апгрейд техники и т.д., социальное окружение.
Визуальное программирование алгоритмов, это всего лишь один из множества возможных вариантов использования.
и т.д. и т.п. Я давно обдумываю это направление, но нет ресурсов плотно им заняться.
Рано или поздно это направление выстрелит, у вас есть реальный шанс оказаться на передовой нового направления. Современные возможности коммуникации дают широкую возможность онлайн управления игровыми объектами.Rollon
18.10.2016 11:07ну смотрите. Возможность удаленно управлять танками, это да, это прекрасно. По крайней мере в некоторых случаях. Например если проходит большой турнир в Москве, а мне из Томска туда ехать вообще лень. Но я все еще могу участвовать в турнире… и да, такое мы делать будем.
На счет покупать домой, ну вам виднее, однако подумайте о том, что вы сможет «подсадить» своих детей на программирование и на относительно сложное планирование. В общем наш проект дает вам кучу возможностей для развития ваших детей… при этом и вам самим это будет интересно, так что вообще прекрасно))
«всего лишь один из множества возможных вариантов использования.» согласен, однако для нашего проекта думаю это все таки наиболее оптимально.
«у вас есть реальный шанс оказаться на передовой нового направления» да мы имеем шанс во многом быть «первыми» ))
DLOWarl
18.10.2016 13:39Было бы достаточно интересно если роботы могли бы собираться из модулей, причем не только человеком, но и автоматически. Этакими базами-заводами. Тогда и смысл в захватах точек появится.
Rollon
18.10.2016 13:41Заводы у нас будут.
Модульность это по для начала дорого очень, если будем очень успешны на кикстартере, тогда постараемся добавить ее сразу, если не, то добавим потом.
Насчет собирать их прям на заводе, было бы классно, но это прям совсем дорого:( но тут опять таки… будут деньги, сделаем))
Bangybug
18.10.2016 14:28Как хобби, сейчас занимаюсь исследованием ультразвука. Нашёл один интересный проект с тем же самым копеечным датчиком что и у вас. При наличии даже небольшой избыточной вычислительной мощности, можно сделать сонар для 10-15 градусного угла, не прибегая к повороту датчика. https://www.hackster.io/graham_chow/spread-spectrum-phased-array-sonar-018e22
tretyakovpe
18.10.2016 15:49Почему только снаряды? Нельзя использовать что-то изображающее лазерную пушку?
Как лазертаг в «мире людей».
Это даёт разные тактики. Например лазер снимает меньше здоровья, но зато «патроны» бесконечные.
К тому же, если разместить несколько датчиков на платформе, можно отключать определенные модули при попадании в соответствующий датчик.Rollon
18.10.2016 15:52Я считаю, что переносить механику из виртуального в реальное надо по максимум. А выстрел и звон попадания снаряда в противника, это прям очень важное и зрелищное событие.
Заменять его лазерным пиу пиу, которого не видно… ну вообще не очень.
Кроме того, реальные снаряды дают такие неплохие эффекты как например рикошет… реальный рикошет причем)) случайность в подобных играх много стоит, и добавляет кучу веселья
А отключать модули можно и от настоящих снарядов)
MBystrov
18.10.2016 21:00Игровой процесс не раскрыт: создается впечатление, что играть не во что. Потенциального игрока нужно заинтересовать чем-то, а что тут есть? Мой совет: смоделируйте игровую схватку и продемонстрируйте сам процесс сражения. Должна быть мотивация купить эту игру и опробовать её с друзьями (а вот про спасение робототехники можно не заливать — игра на этой идее не продвинется никуда), а захочется-ли моим друзьям ломать голову о том как объезжать виртуальные объекты и попасть выстрелом, когда у нас свободного времени 2-4 часа после работы?
Rollon
18.10.2016 21:14Ну про 2-4 часа после работы… игра скорее про «собрались на выходных и устроили пару битв»
игровой процесс повторяет компьютерные стратегии, только управление другое, ну и… жизнь
RusikR2D2
18.10.2016 23:12Можно добавить то, чего нет в компьютерных стратегиях — возможность сделать что-то свое. Т.е. добавить возможность конструктора. Т.е. не у всех есть Юниты А и Юниты Б, чьи характеристики известны и предсказуемы, а есть возможность сделать свой юнит С, чьи характеристики никто не знает и не узнает до начала столкновения.
вот тогда будет интересно не только программистам, но и конструкторам — ведь на «встречу» можно принести свои танки. А для «уравнения» шансов сделать как в Мех-играх, когда «сверху» армия ограниченна массой. Т.е. договорной бой ограничен 20 кг техники. И можно принести два танка по 10кг, а можно 10 по 2…Rollon
19.10.2016 06:24правда мне нужно, что бы было интересно не программистам, а простым игрокам, а им заморачиваться с конструкторами не всегда хочется…
однако модульность определенную все равно надо вводить, это верно.RusikR2D2
19.10.2016 09:36это как раз мнение простого игрока. В свое время переиграл во множество стратегий и «почти стратегий» — типа mechcommander, к которой, судя по описанию, ближе всего игра (это если не брать программирование, которое мне как раз в этом проекте и не нравится.). Так вот, больше всего мне не нравилось невозможность кастомизировать юнитов или придумать своих. Особенно это достает в сетевой игре против реального противника — когда тот точно знает, что может твой юнит и не суется под обстрел. А так хочется его удивить! В это был плюс mechcommander, т.к. мехов можно было кастомизировать как угодно.
для тех, кому не хочется ковыряться, должны быть стандартные, сбалансирование юниты.Rollon
19.10.2016 09:43Ну, как я и сказал, модульность мы вводить будем. Вопрос только в том сможем ли мы ввести ее сразу, или добавим потом. (это уже от результата сборов на кикстартере зависит).
Но скорей всего мы введем модульность для «геройских» роботов. Что бы сильно не увеличивать стоимость «порога входа» для новичков. А вот с героями уже можно будет удивлять сколько душе угодно))
З, Ы. Mechcommander шикарен был, ага))
TriBar
19.10.2016 11:25Какое-то время назад загорелся робототехникой. Решил приобщиться и купил себе Lego Mindstorm (только не смеяться...), увиденный когда-то в журнале и так давно желанный и дорогущий до сих пор.
Запал прошел достаточно быстро когда стали понятны реальные проблемы и их уже описывали комментаторы выше — расходно, долго и не очень интересно на самом деле. Практически ничего, что не может предложить виртуальный мир в разы быстрее и дешевле. А то, что это все в «реальной жизни» аргумент не самый весомый, это скорее даже как шаг назад, что приходится тратить ресурсы на создание реальных моделей, хотя все можно симулировать на компьютере.
Слишком много временных ограничений, нужно и модуль перегрузить и батарейки заряжать регулярно. Набор действий достаточно ограниченный — то что робот может проехать вперед 2 секунды и помигать лампочкой как-то не вызывает уже восторг.
И все таки какая киллер-фича задумки которая привлечет массы? Почему была выбрана именно модель «разработка-загрузка алгоритма», а не непосредственно управление роботами например?
Фишкой может быть очень богатый набор преднастроек — то есть можно достать все из коробки и начать играть за 10 минут и не разбираться как мигать лампочкой пару часов. Кто-то и останется на таком уровне и будет своего рода «живая» настольная игра, но для продвинутых юзеров дать возможность прокачивать все что можно.
Кстати есть такая настолка — RoboRally, и там есть программирование и фигурки, но там обходятся без роботов совсем.Rollon
19.10.2016 11:491. На компьютере можно моделировать что угодно, однако при этом настольные игры например живут неплохо. У реальности свои прелести.
2. Про какой нибудь танк в компьютерной игре тоже можно сказать «он может проехать вперед и помигать лампочкой»… однако из простых действий собираются большие комплексные игры. На это и надо смотреть.
3. Для непосредственного управления роботами есть машинки на радиоуправлении. В них больше недели вообще кто нибудь играет? А если делать управление рамкой, то это тоже самое что и на компьютере, так же переходить не будут.
4. Так собственно и так можно достать из коробки и играть сразу… только батарейку вставить. Как там и написано, и как показывается в ролике, алгоритм собирается в пару кликов.
5. RoboRally видел, но там по сути гонки… у нас стратегия, и да, роботыTriBar
19.10.2016 16:03Отстрелялись, но никакая дискуссия не получается…
Я бы проявил больший интерес к проекту, если бы это было более гибридное решение компьютерной и реальной игры, скажем управление было бы наподобие стратегий в играх, но просчет физики снаряда и рикошетов возьмет на себя уже реальный мир. Не верится, что будет очень интересно в период активной битвы размышлять категориями — «ехать вперед 2 такта, повернуть башню 35 градусов, 3 градуса вверх и стрелять», ну или может делать тогда turn-based.Rollon
19.10.2016 16:09Если делать такое же управление как и на компьютерах, зачем тогда переходить с компьютеров в реальность?
А на счет интересно… во первых это заставляет заранее продумывать свои действия. Во вторых это добавляет… паники! Когда ты накосячил в алгоритме, а противник уже готов твоего робота «пристрелить» тебе так или иначе придется судорожно собирать новый алгоритм. И хотя из такой ситуации алгоритм сложный не нужен, и это реально займет секунды, но ведь потом еще придется пережидать задержку. А это уже адреналина добавит. В стратегию. Адреналина. 7,62 была такая игра, там достаточно хардкорная стратегия, но в реальном времени, хоть и с активной паузой. Так в некоторых моментах напряжения больше чем в шутерах… и это в стратегии! У нас конечно немного другое, но я считаю, что такая система как у нас сделает такой же эффект как в 7,62.TriBar
19.10.2016 16:36Затем, что многие знают, как управлять роботами в компьютерных играх. А как в реальности управлять уже не особо, но стоило бы ожидать что-то похожее.
А зачем переходить в реальность с компьютеров — вот это как раз то, что вы должны объяснить своей целевой аудитории. А сейчас получается, что у вас управление главное отличие.Rollon
19.10.2016 16:42Управление это скорее дополнение.
Главное, что «войска» теперь настоящие. Их пощупать можно. И в противника можно запустить. И да противник то в живую рядом стоит/сидит.
Ну и так как это настоящие роботы им можно еще применений придумать. На кота поохотится, банки с пивом потаскать, гонки с препятствиями устроить… тут уже от фантазии игроков зависит. И если игроков, что то не устраивало в компьютерной игре, не хватало режимов допустим, там они не могли с этим ничего поделать. Тут же ради бога. Реальный мир все таки
qwertyhp
В который раз испытал искреннюю признательность к своим учителям, которые обучили меня пунктуации и орфографии.
Rollon
искренне прошу прощения, если задел чьи то чувства:(
mypomacca
вот потому еще живы редакторы и клинеры ;)