Прежде всего Google уточняет цифры: в программе принимают участие 23 автомобиля Lexus RX450h SUV, которые передвигаются по дорогам Калифорнии, главным образом в Маунтин-Вью. Кроме них на закрытых полигонах находятся ещё 9 прототипов. С 2009 года робомобили успели проехать 1 627 591 километр в роботизированном режиме (под ним подразумевается, что управление осуществляет только программное обеспечение, а находящийся в салоне авто водитель руля не касается). В среднем за неделю робокары проезжали по 16 000 км по открытым дорогам.
За шесть лет произошло 12 аварий с участием робомобилей, причём все они произошли по вине людей. Ближайшая по времени майская авария произошла с Lexus, когда тот остановился на красный свет на перекрёстке в Маунтин-Вью. В этой время какой-то автомобиль, управляемый человеком, помял задний бампер Lexus и повредил таким образом сенсоры на нём. Скорость движения виновника в этот момент составляла всего около 1.5 км/ч, так что ДТП закончилось без серьёзных повреждений.
Любопытно оценить сложные дорожные ситуации с которыми встречались робокары и как они сумели выйти из них:
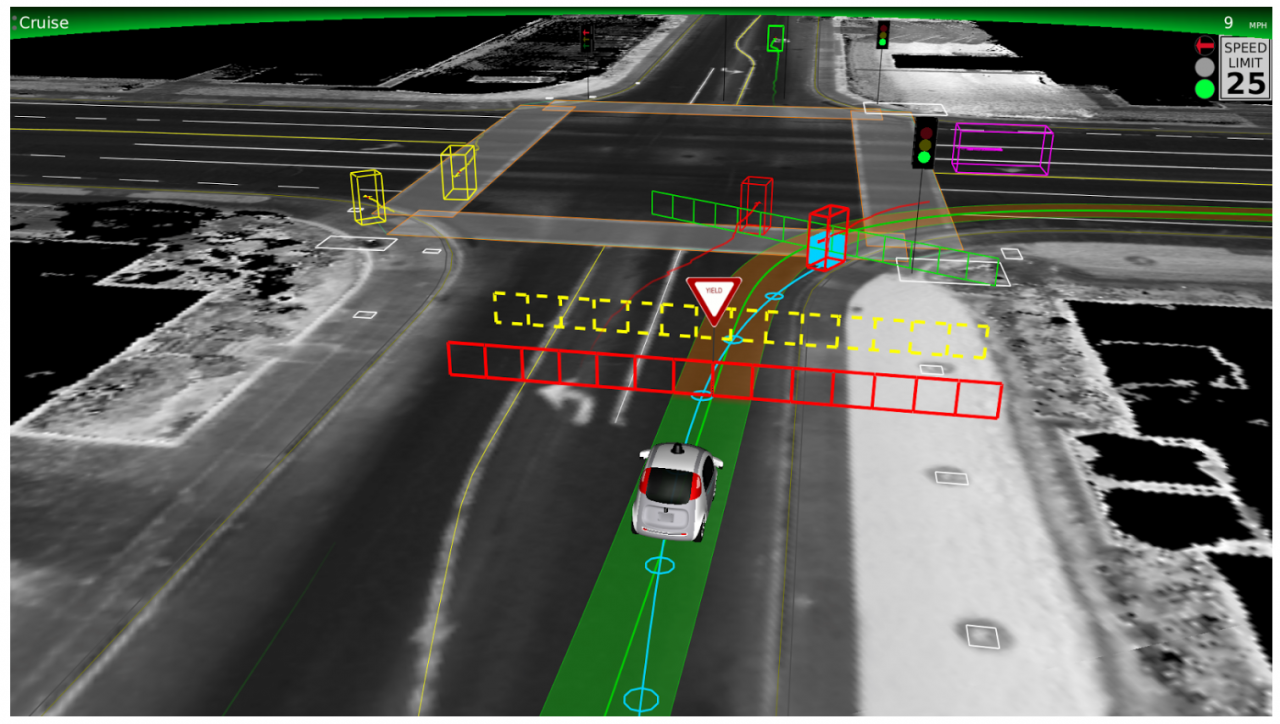
На схеме выше показан план движения робокара на перекрёстке и двух мотоциклистов, которые обозначены красными параллелепипедами (ломаная красная линия — это путь их движения). Робокар остановился на перекрёстке, в это время левый по отношению к нему мотоциклист сравнительно удачно миновал перекрёсток и поехал дальше. Зато мотоцикл, поворачивающий справа навстречу робокару, по неизвестной причине выехал на встречку так, что оказался прямо на пути движения гугломобиля — его вычисленная траектория движения показана голубой линией. Программное обеспечение авто приняло решение остановиться и не ехать навстречу, давая возможность мотоциклу избежать столкновения прямо у перекрёстка. В итоге робокар и мотоцикл благополучно разминулись, избежав неприятностей при аварии. Дополнительная трудность заключалась в том, что всё происходило в тёмное время суток, и водителю-человеку было бы затруднительно дать верную оценку ситуации.
Комментарии (15)
JDima
08.06.2015 13:47Читаю отчеты об авариях. Почти во всех случаях гугловым машинам въезжали в зад, причем на низкой скорости. Другие автомобили считают гугловые настолько привлекательными, что цветочно-шоколадный этап можно пропустить и приступить сразу к делу?

tossshik
08.06.2015 14:06+2Могу предположить, исходя из своего водительского опыта, что едущие сзади водители прогнозировали определенное поведение робомобиля, в данном случае динамику торможения перед светофором. Поведение робота с их прогнозом не совпадало, например робот замедлялся линейно, тогда как люди обычно увеличивают силу замедления по мере приближения к светофору. Отсюда аварии.
JDima
08.06.2015 14:26Если люди ожидали усиления торможения, то они увеличивали бы дистанцию от робота, а не сближались бы с ним (так как они усиливают торможение, а робот — нет). Судя по копеечной скорости, столкновение было перед остановкой.
Но да, вполне вероятно, что что-то в поведении робота рвет человеку шаблон. Либо многие хотят заработать ачивку «я врезался в автопилотируемый гуглкар».
Ajex
08.06.2015 14:45+3Думаю все проще. Гугломобиль с навешенной электроникой выглядит для многих водителей сродни красотке в кроткой юбке, что отвлекает внимание и приводит к аварии.

BalinTomsk
08.06.2015 17:53+1--Либо многие хотят заработать ачивку «я врезался в автопилотируемый гуглкар».
И добавить десятку в месяц к страховке?

fenrirgray
08.06.2015 19:39+3>>> Но да, вполне вероятно, что что-то в поведении робота рвет человеку шаблон.
Мне куда вероятней кажется версия, что люди вообще весьма часто вот так вот врезаются кому-то в зад. Каждый день такие аварии вижу, почему гугловский робот должен быть исключением? Это же в него врезаются, от самого робота тут мало что зависит.

betony
09.06.2015 01:29Может едущие сзади надеялись, что робот проскочит на желтый, а он перестраховался и затормозил в пол?


nomadmoon
09.06.2015 02:57+3> В этой время какой-то автомобиль, управляемый человеком, помял задний бампер Lexus и повредил таким образом сенсоры на нём. Скорость движения виновника в этот момент составляла всего около 1.5 км/ч
Интересно почему гуглкар не определил что в него сейчас врежется тачка и не подался на метр вперед, если дорожная обстановка позволяла.
psman
09.06.2015 12:17Видимо он все же считает что его окружают не идиоты. Версия с правилом ДДД выйдет чуть позже, видимо.

Loki3000
10.06.2015 17:15А мне вот что интересно: после того как в робомобиль врезался автомобиль на скорости 1,5 км/ч и повредил сенсоры на бампере, в состоянии ли робомобиль самостоятельно продолжать движение? Вообще сколько надо вывести из строя датчиков, чтобы автомобиль не смог продолжить движение в автоматическом режиме?
RoboHunter
Впечатляют результаты. Интересно, будет ли в России проходить тестирование или презентация роботизированных авто?
Lisio
Ага, так вот и сказали человеку с таким ником.
RoboHunter
made my day :-D
жаль не могу поставить плюсик, но посмеялась от души, спасибо!)))