Продолжение цикла статей.
Предыдущие посты серии:
1. Часть 4
2. Часть 3
3. Часть 2
4. Часть 1
В прошлый раз удалось добиться следующих целей:
В этом посте оформим проект в виде модулей xacro, чтобы он стал более читаемым (ранее для наглядности мы затолкали все описание в один xacro файл). Добавим виртуальную видеокамеру и imu. Просмотрим как добавлять в gazebo посторонние предметы окружающего мира.
Для начала проверим, работает ли в терминале перемещение по ROS-системе с помощью команд roscd:
Если не работает, то зайдем в папку с catkin_ws и выполним команду:
Теперь зайдем в папку с описанием робота:
В ранее созданном файле spawn.launch было обозначено следующее:
Использовалась команда cat для загрузки содержимого rosbots.xacro в параметр robot_description.
Для полного использования преимуществ формата команд xacro, код необходимо немного поправить. Заменим вышеуказанную строку на следующую:
Теперь система будет использовать xacro.py для выполнения rosbots.xacro.
Такие же изменения потребуются и для второго launch файла — rviz.launch.
Поменяем
на
Проверим, что все работает с новым синтаксисом.
Сперва посмотрим на модель в редакторе rviz:
Затем, закрыв rviz, проверим в gazebo.
1-й терминал:
2-й:
*Можно увидеть сообщения
Погоды они не далают, поэтому можно не обращать внимание.
Итак, все работает как и прежде, только теперь используется формат xacro.
Что он дает? Данный формат позволяет реорганизовать код. По мере роста проекта, это позволит в дальнейшем лучше ориентироваться.
Теперь пришло время разделить rosbots.xacro на составные части и использовать преимущества xacro.
Переместим все, что касается редактора gazebo (теги gazebo) из rosbots.xacro в новый файл.
Создадим файл rosbots.gazebo.xacro в папке urdf:
И поместим туда код:
Этот же код в пределах тега
Теперь вновь созданный файл «привяжем» к rosbots.xacro. Откуда-то же сведения о gazebo-составляющей rosbots.xacro должен получать!
Соответственно добавим в rosbots.xacro:
Данную строку вставим после строки с тегом
Еще раз проверим, что все работает в новом формате:
1-й терминал:
2-й:
Таким образом для пользователя все остается на своих местах в плане запуска модели в симуляции, команды те же.
Теперь, когда проект принял более-менее структурированный вид, навесим дополнительные сенсоры.
Чтобы пока сильно не загромождать робота «обвесами» добавим всего всего лишь два сенсора: камеру и imu(инерциальный измерительный модуль или гироскоп).
Для этих целей потребуется поправить файлы rosbots.xacro и rosbots.gazebo.xacro.
Начнем с камеры и файла rosbots.xacro. Для того, чтобы все получилось, для сенсора необходимо добавить:
В другом файле — rosbots.gazebo.xacro — мы добавим:
Разместим в rosbots.xacro в пределах тега (для удобства можно добавить в конце):
Код выше добавляет link и joint для нашей камеры, позволяя ее визуализировать.
Проверим это.
1-й терминал:
2-й:
Если все верно, то можно увидеть добавленную камеру на роботе (белого цвета):

Вроде все просто. Однако надо понимать, что была добавлена только визуализация камеры. Как эта камера будет себя вести в мире физических вещей пока не ясно. Ее поведение не определено. Камера пока не способна делать фото или снимать видео.
Пришла очередь поработать над файлом с gazebo.
Добавим в
Как несложно догадаться в коде мы определили параметры камеры:
Теперь все готово как для визализации камеры, так и ее симуляции.
Если теперь заново запустить симуляцию и посмотреть список топиков, то можно увидеть, что среди них добавились топики, генерируемые камерой:
Тут целый арсенал топиков! Но, как правило, не все они так часто используются кроме первых трех.
*здесь надо оговориться что в текущей конфигурации образа для VMWare Workstation gazebo вылетает при попытке запустить трансляцию в rviz с виртуальной видеокамеры. Возможное решение указано в конце поста в разделе ошибки.
Для большей наглядности при работе с камерой в симуляции запустим rviz и поместим какой-нибудь объект перед роботом.
Для этого сперва понадобится сам объект, который будет добавлен в gazebo.
Скачайте файл object.urdf и положите его в ~/catkin_ws/src/
Запустим.
1-й терминал:
2-й (разместим модели):
В симуляции получим такую картинку:

Модель робота и столб, который был так же добавлен как модель.
Предметы в редактор gazebo можно добавлять и более простым способом со вкладки внутри редактора «insert»:

Теперь посмотрим, что видит робот.
Не закрывая два предыдущих терминала, запустим rviz с описанием робота:
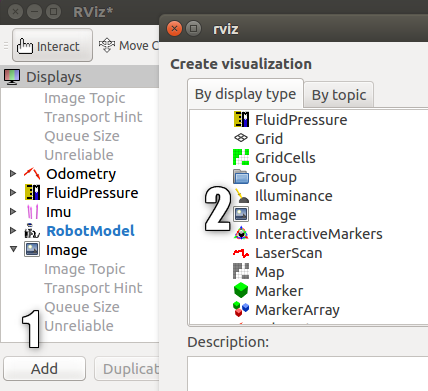
И добавим в нем новый Display с названием «Image»:
Появится новый дисплей с изображением с камеры и… вылетит редактор gazebo.
К сожалению, при работе на виртуальной машине с образом VMWare добавление трансляции с виртуальной камеры приводит к ошибке.
Если работа ведется не на виртуальной машине, а на реальной, то получим изображение с виртуальной камеры в gazebo с изображением фигуры столба:
Теперь добавим к модели IMU.
Процесс добавления imu аналогичен добавлению камеры.
Сперва откроем rosbots.gazebo.xacro и внесем
Данный код, как и код для добавленной камеры, внесем в пределах тега
Как не сложно догадаться из кода, он будет публиковать данные в топик /imu/data.
Теперь, если заново разместить модель робота в gazebo и выполнить в соседнем терминале команду:

Также можно взглянуть, чтО он публикует, выполнив команду:

Если кратко, то imu публикует следующую информацию:
Добавим в rosbots.gazebo.xacro все также в пределах тега
Этот код определит дополнительные параметры робота: коэффициенты трения для колес, цвета в gazebo, контактный датчик. Контактный датчик будет срабатывать сразу после того, как бампер робота коснется препятствия.
Теперь заново запустим gazebo, разместим модель, а в rviz добавим imu display как и ранее, добавляли display с камерой:

Если все прошло удачно, то увидим, что imu публикует сообщения в топик.
В завершение поуправляем роботом в симуляции и посмотрим как изменяются данные с imu:
1-й терминал:
2-й:
3-й:
Возможные ошибки при работе:
1. Модель робота не появляется в gazebo (Package[rosbots_description] does not have a path) — закрыть gazebo, выполнить в терминале source devel/setup.bash, заново запустить gazebo.
2.
Возможное решение (не проверялось):
Предыдущие посты серии:
1. Часть 4
2. Часть 3
3. Часть 2
4. Часть 1
В прошлый раз удалось добиться следующих целей:
- визуализировать робота, создав xacro-файл, содержащий urdf-описание робота;
- создать два launch файла, один из которых позволяет разместить робота в редакторе-симуляторе Gazebo;
- поуправлять роботом в симуляторе Gazebo с клавиатуры.
В этом посте оформим проект в виде модулей xacro, чтобы он стал более читаемым (ранее для наглядности мы затолкали все описание в один xacro файл). Добавим виртуальную видеокамеру и imu. Просмотрим как добавлять в gazebo посторонние предметы окружающего мира.
Для начала проверим, работает ли в терминале перемещение по ROS-системе с помощью команд roscd:
roscd rosbots_description/launchЕсли не работает, то зайдем в папку с catkin_ws и выполним команду:
source devel/setup.bashТеперь зайдем в папку с описанием робота:
roscd rosbots_description/launchВ ранее созданном файле spawn.launch было обозначено следующее:
<param name="robot_description" command="cat '$(find rosbots_description)/urdf/rosbots.xacro'" />Использовалась команда cat для загрузки содержимого rosbots.xacro в параметр robot_description.
Для полного использования преимуществ формата команд xacro, код необходимо немного поправить. Заменим вышеуказанную строку на следующую:
<param name="robot_description" command="$(find xacro)/xacro.py '$(find rosbots_description)/urdf/rosbots.xacro'" />Теперь система будет использовать xacro.py для выполнения rosbots.xacro.
Такие же изменения потребуются и для второго launch файла — rviz.launch.
Поменяем
<param name="robot_description" command="cat '$(find rosbots_description)/urdf/rosbots.xacro'" />на
<param name="robot_description" command="$(find xacro)/xacro.py '$(find rosbots_description)/urdf/rosbots.xacro'"/>Проверим, что все работает с новым синтаксисом.
Сперва посмотрим на модель в редакторе rviz:
roslaunch rosbots_description rviz.launchЗатем, закрыв rviz, проверим в gazebo.
1-й терминал:
roslaunch gazebo_ros empty_world.launch2-й:
roslaunch rosbots_description spawn.launch*Можно увидеть сообщения
желтого цвета
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
xacro.py is deprecated; please use xacro insteadПогоды они не далают, поэтому можно не обращать внимание.
Итак, все работает как и прежде, только теперь используется формат xacro.
Что он дает? Данный формат позволяет реорганизовать код. По мере роста проекта, это позволит в дальнейшем лучше ориентироваться.
Работаем с xacro
Теперь пришло время разделить rosbots.xacro на составные части и использовать преимущества xacro.
Переместим все, что касается редактора gazebo (теги gazebo) из rosbots.xacro в новый файл.
Создадим файл rosbots.gazebo.xacro в папке urdf:
nano rosbots.gazebo.xacroИ поместим туда код:
rosbots.gazebo.xacro
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="rosbots" >
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<legacyMode>false</legacyMode>
<alwaysOn>true</alwaysOn>
<publishWheelTF>true</publishWheelTF>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<updateRate>100.0</updateRate>
<leftJoint>wheel_left_joint</leftJoint>
<rightJoint>wheel_right_joint</rightJoint>
<wheelSeparation>1.1</wheelSeparation>
<wheelDiameter>0.52</wheelDiameter>
<wheelAcceleration>1.0</wheelAcceleration>
<torque>20</torque>
<commandTopic>/part2_cmr/cmd_vel</commandTopic>
<odometryTopic>odom</odometryTopic>
<odometryFrame>odom</odometryFrame>
<robotBaseFrame>base_link</robotBaseFrame>
</plugin>
</gazebo>
</robot>
Этот же код в пределах тега
<gazebo> </gazebo>Теперь вновь созданный файл «привяжем» к rosbots.xacro. Откуда-то же сведения о gazebo-составляющей rosbots.xacro должен получать!
Соответственно добавим в rosbots.xacro:
<xacro:include filename="$(find rosbots_description)/urdf/rosbots.gazebo.xacro" /> Данную строку вставим после строки с тегом
<robot><robot name="rosbots" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find rosbots_description)/urdf/rosbots.gazebo.xacro" />Еще раз проверим, что все работает в новом формате:
1-й терминал:
roslaunch gazebo_ros empty_world.launch2-й:
roslaunch rosbots_description spawn.launchТаким образом для пользователя все остается на своих местах в плане запуска модели в симуляции, команды те же.
Добавим новые сенсоры
Теперь, когда проект принял более-менее структурированный вид, навесим дополнительные сенсоры.
Чтобы пока сильно не загромождать робота «обвесами» добавим всего всего лишь два сенсора: камеру и imu(инерциальный измерительный модуль или гироскоп).
Для этих целей потребуется поправить файлы rosbots.xacro и rosbots.gazebo.xacro.
Начнем с камеры и файла rosbots.xacro. Для того, чтобы все получилось, для сенсора необходимо добавить:
- связь (link). Она будет представлено файлом формата dae.
- сустав (joint), который прикрепит камеру к телу робота.
В другом файле — rosbots.gazebo.xacro — мы добавим:
- плагин, который определит связь (link), созданную выше, в качестве сенсора.
Разместим в rosbots.xacro в пределах тега (для удобства можно добавить в конце):
rosbots.xacro
<joint name="camera_joint" type="fixed">
<origin xyz="0.49 -0.03 0.75" rpy="0 0.21 0" />
<parent link="base_link"/>
<child link="camera_link" />
</joint>
<link name="camera_link">
<visual>
<geometry>
<mesh filename="package://rosbots_description/meshes/camera.dae" scale="4.0 4.0 4.0"/>
</geometry>
<origin xyz="0.0 0 0" rpy="0 0 0"/>
</visual>
<collision>
<geometry>
<mesh filename="package://rosbots_description/meshes/camera.dae" scale="4.0 4.0 4.0"/>
</geometry>
<origin xyz="0.0 0 0" rpy="0 0 0"/>
</collision>
</link>
Код выше добавляет link и joint для нашей камеры, позволяя ее визуализировать.
Проверим это.
1-й терминал:
roslaunch gazebo_ros empty_world.launch2-й:
roslaunch rosbots_description spawn.launchЕсли все верно, то можно увидеть добавленную камеру на роботе (белого цвета):
Вроде все просто. Однако надо понимать, что была добавлена только визуализация камеры. Как эта камера будет себя вести в мире физических вещей пока не ясно. Ее поведение не определено. Камера пока не способна делать фото или снимать видео.
Пришла очередь поработать над файлом с gazebo.
Добавим в
rosbots.gazebo.xacro
внутри тегов
добавим:
<robot> </robot>добавим:
<gazebo reference="camera_link">
<sensor type="camera" name="camera1">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.04</horizontal_fov>
<image>
<width>320</width>
<height>240</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.1</near>
<far>50</far>
</clip>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0</updateRate>
<cameraName>camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
Как несложно догадаться в коде мы определили параметры камеры:
- update_rate: как часто будут поступать данные
- width/height: разрешение снимков. В данном случае, 320x240.
- format: формат видео (R8G8B8).
- imageTopicName: наименование топика, куда будут посылаться данные
- frameName: link-связь, к которой будет привязана камера.
Теперь все готово как для визализации камеры, так и ее симуляции.
Если теперь заново запустить симуляцию и посмотреть список топиков, то можно увидеть, что среди них добавились топики, генерируемые камерой:
rostopic list/rosbots/camera1/camera_info
/rosbots/camera1/image_raw
/rosbots/camera1/image_raw/compressed
/rosbots/camera1/image_raw/compressed/parameter_descriptions
/rosbots/camera1/image_raw/compressed/parameter_updates
/rosbots/camera1/image_raw/compressedDepth
/rosbots/camera1/image_raw/compressedDepth/parameter_descriptions
/rosbots/camera1/image_raw/compressedDepth/parameter_updates
/rosbots/camera1/image_raw/theora
/rosbots/camera1/image_raw/theora/parameter_descriptions
/rosbots/camera1/image_raw/theora/parameter_updates
/rosbots/camera1/parameter_descriptions
/rosbots/camera1/parameter_updatesТут целый арсенал топиков! Но, как правило, не все они так часто используются кроме первых трех.
Изображение в rviz из симулятора gazebo
*здесь надо оговориться что в текущей конфигурации образа для VMWare Workstation gazebo вылетает при попытке запустить трансляцию в rviz с виртуальной видеокамеры. Возможное решение указано в конце поста в разделе ошибки.
Для большей наглядности при работе с камерой в симуляции запустим rviz и поместим какой-нибудь объект перед роботом.
Для этого сперва понадобится сам объект, который будет добавлен в gazebo.
Скачайте файл object.urdf и положите его в ~/catkin_ws/src/
Запустим.
1-й терминал:
roslaunch gazebo_ros empty_world.launch2-й (разместим модели):
rosrun gazebo_ros spawn_model -file /home/pi/catkin_ws/src/object.urdf -urdf -x 1 -y 0 -z 1 -model my_objectroslaunch rosbots_description spawn.launchВ симуляции получим такую картинку:
Модель робота и столб, который был так же добавлен как модель.
Предметы в редактор gazebo можно добавлять и более простым способом со вкладки внутри редактора «insert»:
Теперь посмотрим, что видит робот.
Не закрывая два предыдущих терминала, запустим rviz с описанием робота:
roslaunch rosbots_description rviz.launchИ добавим в нем новый Display с названием «Image»:
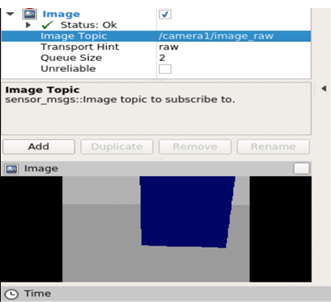
Появится новый дисплей с изображением с камеры и… вылетит редактор gazebo.
К сожалению, при работе на виртуальной машине с образом VMWare добавление трансляции с виртуальной камеры приводит к ошибке.
Если работа ведется не на виртуальной машине, а на реальной, то получим изображение с виртуальной камеры в gazebo с изображением фигуры столба:
Теперь добавим к модели IMU.
IMU (гироскоп)
Процесс добавления imu аналогичен добавлению камеры.
Сперва откроем rosbots.gazebo.xacro и внесем
код
<gazebo>
<plugin name="gazebo_ros_imu_controller" filename="libgazebo_ros_imu.so">
<!-- <robotNamespace></robotNamespace> -->
<topicName>imu/data</topicName>
<serviceName>imu/service</serviceName>
<bodyName>base_link</bodyName>
<gaussianNoise>0</gaussianNoise>
<rpyOffsets>0 0 0</rpyOffsets>
<updateRate>30.0</updateRate>
<alwaysOn>true</alwaysOn>
<gaussianNoise>0</gaussianNoise>
</plugin>
</gazebo>
Данный код, как и код для добавленной камеры, внесем в пределах тега
<robot></robot>Как не сложно догадаться из кода, он будет публиковать данные в топик /imu/data.
Теперь, если заново разместить модель робота в gazebo и выполнить в соседнем терминале команду:
rostopic list, можно увидеть топик с imu данными среди прочих:Также можно взглянуть, чтО он публикует, выполнив команду:
rostopic echo /imu/data -n1 Если кратко, то imu публикует следующую информацию:
- orientation: ориентация робота по осям x, y, z и w.
- angular_velocity: угловая скорость робота.
- linear_acceleration: линейное ускорение.
Остался небольшой штрих
.Добавим в rosbots.gazebo.xacro все также в пределах тега
код
<gazebo reference="wheel_left_link">
<mu1>1.0</mu1>
<mu2>1.0</mu2>
<kp>1000000.0</kp>
<kd>100.0</kd>
<minDepth>0.001</minDepth>
<maxVel>1.0</maxVel>
</gazebo>
<gazebo reference="wheel_right_link">
<mu1>1.0</mu1>
<mu2>1.0</mu2>
<kp>1000000.0</kp>
<kd>100.0</kd>
<minDepth>0.001</minDepth>
<maxVel>1.0</maxVel>
</gazebo>
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
<mu1>0.3</mu1>
<mu2>0.3</mu2>
<sensor type="contact" name="bumpers">
<always_on>1</always_on>
<update_rate>50.0</update_rate>
<visualize>true</visualize>
<contact>
<collision>base_footprint_collision_base_link</collision>
</contact>
</sensor>
</gazebo>
<gazebo reference="camera_link">
<mu1>0.2</mu1>
<mu2>0.2</mu2>
</gazebo>Этот код определит дополнительные параметры робота: коэффициенты трения для колес, цвета в gazebo, контактный датчик. Контактный датчик будет срабатывать сразу после того, как бампер робота коснется препятствия.
Теперь заново запустим gazebo, разместим модель, а в rviz добавим imu display как и ранее, добавляли display с камерой:
Если все прошло удачно, то увидим, что imu публикует сообщения в топик.
В завершение поуправляем роботом в симуляции и посмотрим как изменяются данные с imu:
1-й терминал:
roslaunch gazebo_ros empty_world.launch2-й:
roslaunch rosbots_description spawn.launchroslaunch rosbots_description rviz.launch3-й:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/part2_cmr/cmd_velВозможные ошибки при работе:
1. Модель робота не появляется в gazebo (Package[rosbots_description] does not have a path) — закрыть gazebo, выполнить в терминале source devel/setup.bash, заново запустить gazebo.
2.
gzserver: /build/ogre-1.9-mqY1wq/ogre-1.9-1.9.0+dfsg1/OgreMain/src/OgreRenderSystem.cpp:546: virtual void Ogre::RenderSystem::setDepthBufferFor(Ogre::RenderTarget*): Assertion `bAttached && "A new DepthBuffer for a RenderTarget was created, but after creation" "it says it's incompatible with that RT"' failed.
Aborted (core dumped)Возможное решение (не проверялось):
https://bitbucket.org/osrf/gazebo/issues/1837/vmware-rendering-z-ordering-appears-random