Рассматриваются нюансы установки ORB_SLAM3 на одноплатном пк — raspberry pi 4 c ОС Raspbian buster, проводится поверхностный анализ возможностей алгоритма с учетом ограничений raspberry, показаны возможные пути оптимизации производительности, используется помимо прочего ROS noetic как связующее звено между imu, csi камерой raspberry pi и ORB_SLAM3. Статья не претендует на научность, излагается мнение автора с опорой на экспериментальную базу.
Вступление
Появилась интересная задача: построить маршрут в помещении, здании и т.п., да так, чтобы по этому маршруту можно было «пройти и назад вернуться». Сверхточность не важна, сколько понимание пространства и маршрута. Под «пройти» подразумевается перемещение слабовидящего человека с неким прибором в руке.
Первое что пришло на ум — это конечно же лидары и камеры глубины. Однако эти решения были отложены как дорогостоящие и/или неудобные.
Было решено посмотреть в сторону ORB_SLAM, у которого «поспела» 3-я версия (с обновлениями 2021г.).
Так как ранее доводилось работать с ORB_SLAM2, но производительность оставляла желать лучшего на слабом железе (raspberry pi3), то сложилось впечатление, что на raspberry pi4 обновленный ORB_SLAM3 должен завестись.
Посмотрим, что из этого получилось.
Но для начала —
Установим ROS noetic
ROS — robot operation system понадобится, чтобы связать данные, поступающие от гироскопа/акселерометра, камеры raspberry pi и ORB_SLAM.
Как установить ROS подробно здесь описываться не будет, приведем только ссылку на статью-источник, следуя которой можно установить ROS на raspbian buster — здесь,
а также краткое изложение команд из статьи по приведенной ссылке.
Небольшие уточнения, далее будут приводиться со знаком "*".
ROS различается наименованиями, каждое из которых «привязано» к определенным дистрибутивам. Так для raspbian buster подходит — ROS noetic.
Список команд для установки ROS согласно приводимой статье
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu buster main" > /etc/apt/sources.list.d/ros-noetic.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt-get install -y python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential cmake
sudo rosdep init
rosdep update
mkdir ~/ros_catkin_ws && cd ~/ros_catkin_ws
sudo apt install -y python3-rosdep python3-rosinstall-generator python3-wstool python3-rosinstall build-essential cmake
rosinstall_generator desktop --rosdistro noetic --deps --wet-only --tar > noetic-ros_comm-wet.rosinstall
*rosinstall_generator ros_comm --rosdistro noetic --deps --wet-only --tar > noetic-ros_comm-wet.rosinstall
wstool init src noetic-ros_comm-wet.rosinstall
rosdep install -y --from-paths src --ignore-src --rosdistro noetic -r --os=debian:buster
sudo src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release --install-space /opt/ros/noetic -j1 -DPYTHON_EXECUTABLE=/usr/bin/python3
check:
source /opt/ros/noetic/setup.bash
roscd
roscore*команда
rosinstall_generator ros_comm --rosdistro noetic --deps --wet-only --tar > noetic-ros_comm-wet.rosinstall**swap file можно не увеличивать, если у вас raspberry pi c 8 Гб RAM.
Также создадим рабочее окружение, в которое в дальнейшем будем устанавливать пакеты ROS:
cd ~
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
echo $ROS_PACKAGE_PATH
*outputs: /home/pi/catkin_ws/src:/opt/ros/noetic/shareUsb camera node
Чтобы общаться с камерой на raspberry через ROS, нужна ее(камеры), так называемая, нода (node). Установим ее, хотя этот шаг можно и пропустить, так как в дальнейшем мы установим «специализированную» именно для raspberry ноду — raspicam node.
Однако usb camera node более универсальна, и, если не получится с raspicam node, эта точна должна заработать.
cd ~/catkin_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
git clone https://github.com/ros-perception/image_common.git
git clone https://github.com/ros-perception/image_pipeline.git
git clone https://github.com/ros-perception/vision_opencv.git
cd ..
catkin_makeПакетов несколько, так как нода требует дополнительные зависимости.
Imu node (mpu650)
Этот шаг можно пропустить, для ORB_SLAM будет достаточно и одной камеры (без параллельно работающего imu), однако точность будет хромать и невозможно будет запустить пример с суффиксом inertial.
На данном этапе подразумевается, что будет установлена нода, отвечающая за гироскоп/акселерометр GY-521 (mpu-650). Данный imu дешев и достаточно распространен. Его легко купить и он так же необязателен в своих показаниях. Этот факт мы учтем в дальнейшем. Хорош imu также тем, что неприхотлив и подключается напрямую к raspberry pi gpio, используя 5V, вместо положенных 3.
Чтобы imu заработал необходимо добавить
sudo nano /etc/modulesдве строки:
i2c-bcm2708
i2c-devПерезагрузить систему и можно посмотреть на адрес imu:
sudo apt-get install i2c-tools python-smbus
i2cdetect -y -r 1
sudo i2cget -y 1 0x68 0x75Как правило, это 0x68.
Также здесь пригодится статья, которая прояснит отдельные моменты, связанные с imu, а также позволит его проверить на работоспособность — здесь.
Случается иногда ошибка с imu:
Error: Could not set address to 0x68: Device or resource busyПричины ее могут быть различны, но одна из них, может быть наличие rtc часов, которые когда-то были подключены и о которых «забыли». Чтобы выгрузить часы, пригодится:
lsmod | grep rtc
sudo rmmod rtc-ds1307После этого, imu должен заработать.
Убедившись, что imu работает и может что-то отдавать в serial или иной порт, установим ROS ноду для него.
За основу будет взят пакет ноды mpu6050 — отсюда.
Внимание! Порядок установки будет отличаться от описанного в readme на github.
Далее по readme репо.
Здесь без изменений:
sudo mkdir -p /usr/share/arduino/libraries
cd /usr/share/arduino/libraries
sudo git clone https://github.com/chrisspen/i2cdevlib.git*В этом шаге понадобится patch, который можно взять отсюда — скачать.
cd /tmp
wget http://www.airspayce.com/mikem/bcm2835/bcm2835-1.59.tar.gz
cd bcm2835-1.59
tar zxvf bcm2835-1.59.tar.gz
patch -lNp1 --input=bcm2835_rpi4.patch
./configure
make
make check
sudo make installДалее непосредственно установим саму ноду для imu:
cd ~/catkin_ws
source devel/setup.bash
cd ~/catkin_ws/src
git clone https://github.com/chrisspen/ros_mpu6050_node
cd ..
catkin_make --pkg ros_mpu6050_nodeОшибки, которые могут поджидать:
—
Initializing I2C...
bcm2835_init: gpio mmap failed: Cannot allocate memory
[mpu6050_node-2] process has died [pid 3427, exit code -11,Возможные пути решения изложены здесь и здесь.
—
error FIFO overflow!Решение: увеличить параметр в launch файле imu:
<param name="frequency" type="int" value="10" />Как правило, достаточно изменить на 100 или 200 с 10.
Надо ли дополнительно калибровать сам imu?
Здесь мнения в источниках расходятся, одни говорят, что достаточно взять показания из datasheet и для дешевых imu умножить на 10, другие предлагают пройти процесс калибровки. Для последних оставлю ссылку.
Теперь, когда ROS установлена, а также установлены ноды imu и камеры, можно проверить, что они работают.
Понадобится открыть 3и терминала, и выполнить отдельно команды:
bash -c "source /opt/ros/noetic/setup.bash; roscore" *запустили мастер ноду
bash -c "source /home/pi/catkin_ws/devel/setup.bash; roslaunch usb_cam usb_cam-test.launch"*запустили ноду камеры
sudo bash -c "source /home/pi/catkin_ws/devel/setup.bash; roslaunch ros_mpu6050_node mpu6050.launch"*запустили ноду imu
Если все работает, отлично! Движемся дальше.
Raspicam-node
Raspicam нода менее требовательна к ресурсам по сравнению с usb camera нодой, которую установили ранее. Поэтому ее рекомендуется (автором) использовать.
Вот сравнение потребления вычислительных мощностей нодами-побратимами при одинаковых настройках:
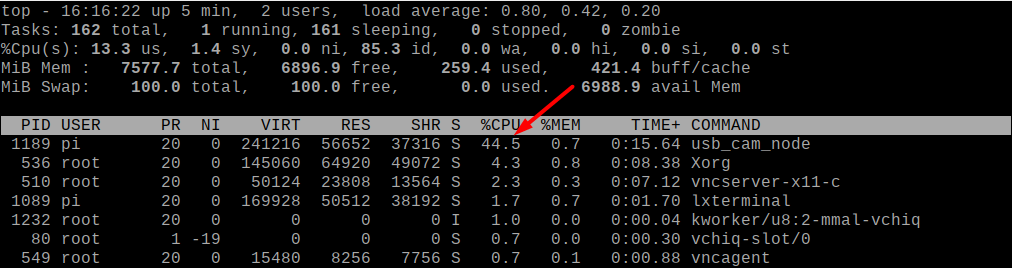

Установка базируется на репо — github.com/UbiquityRobotics/raspicam_node, однако отличается.
sudo apt-get install libogg-dev libvorbis-dev libtheora-dev
cd catkin_ws/src
git clone https://github.com/ros-perception/image_transport_plugins
git clone https://github.com/UbiquityRobotics/raspicam_node.git
cd ..
catkin_makeНода запускается командой:
roslaunch raspicam_node camerav2_1280x960.launchКартинку не выводит, т.к. в launch файле нет image_viewer, и, чтобы убедиться, что все работает, можно либо послушать топик
rostopic echo rostopic echo /raspicam_node/image_rawлибо посмотреть в rviz, подписавшись на соответствующий топик.
Установка ORB_SLAM3
Пакет устанавливается не в catkin_ws!
В целях экономии места и терпения опишем порядок установки тезисно:
---libraries---
sudo apt-get install libboost-all-dev libboost-dev libssl-dev libpython2.7-dev libeigen3-dev---Pangolin---
cd ~
git clone https://github.com/stevenlovegrove/Pangolin
cd Pangolin
./scripts/install_prerequisites.sh recommended
cmake -B build -GNinja
cmake --build build---opencv---
*https://qengineering.eu/install-opencv-4.5-on-raspberry-pi-4.html
wget https://github.com/Qengineering/Install-OpenCV-Raspberry-Pi-32-bits/raw/main/OpenCV-4-5-5.sh
sudo chmod 755 ./OpenCV-4-5-5.sh
./OpenCV-4-5-5.sh---ORB_SLAM3---
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git ORB_SLAM3
cd ORB_SLAM3
chmod +x build.sh
sed -i 's/++11/++14/g' CMakeLists.txt
./build.shORB_SLAM установлен, но необходимо еще собрать для него ROS ноды, которые не устанавливаются автоматически при инсталляции (при запуске ./build.sh):
1. Изменим CMakeLists.txt:
cd /home/pi/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3
sed -i 's/++11/++14/g' CMakeLists.txtздесь же закомментируем AR nodes, т.к. они не собираются:
# Node for monocular camera (Augmented Reality Demo)
#rosbuild_add_executable(MonoAR
#src/AR/ros_mono_ar.cc
#src/AR/ViewerAR.h
#src/AR/ViewerAR.cc
#)
#target_link_libraries(MonoAR
#${LIBS}
#)здесь же в начало файла CMakeLists.txt добавим:
project(ORB_SLAM3)2. Изменим build_ros.sh (/home/pi/ORB_SLAM3):
echo "Building ROS nodes"
cd Examples_old/ROS/ORB_SLAM3
mkdir build
cd build
cmake .. -DROS_BUILD_TYPE=Release -DPYTHON_EXECUTABLE=/usr/bin/python3
make -j3.установим библиотеки:
---Sophus---
cd ~
git clone https://github.com/strasdat/Sophus.git
cd Sophus
mkdir build && cd build && cmake .. && sudo make install
---fmt---
sudo apt install libfmt-devЗаменим Sophus из /home/pi/ORB_SLAM3/Thirdparty/Sophus
на Sophus /home/pi/Sophus
*Удалить директорию и скопировать ту, что сбилдили выше.
4. Изменить топики, которые будет «слушать» ORB_SLAM3, чтобы камера(raspicam_node) и ORB_SLAM общались в одном топике:
nano /home/pi/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3/src/ros_mono.cc
ros::Subscriber sub = nodeHandler.subscribe("/camera/image", 1, &ImageGrabber::GrabImage,&igb);*это можно не делать именно здесь, но потом сделать remap в launch файле с камерой. Ниже будет пометка.
5. Собрать ORB_SLAM3 ноды:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/pi/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3
source /opt/ros/noetic/setup.bash
cd ~/ORB_SLAM3
./build_ros.shТеперь, когда все готово, можно запустить все необходимые ноды, совместно с нодами ORB_SLAM3, используя уже 4-е терминала:
bash -c "source /opt/ros/noetic/setup.bash; roscore"bash -c "source /home/pi/catkin_ws/devel/setup.bash; roslaunch usb_cam usb_cam-test.launch"*либо
bash -c "source /home/pi/catkin_ws/devel/setup.bash; roslaunch raspicam_node camerav2_1280x960.launch"bash -c "source /home/pi/catkin_ws/devel/setup.bash;cd /home/pi/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3;
./Mono /home/pi/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/pi/ORB_SLAM3/Examples/Monocular/TUM1.yaml"sudo bash -c "source /home/pi/catkin_ws/devel/setup.bash; roslaunch ros_mpu6050_node mpu6050.launch"Строим карту с ORB_SLAM3
ORB_SLAM строит своеобразные карты и к ним поначалу сложно привыкнуть. Особенно, если вы привыкли к картам, построенным лидаром или иным «дорогостоящим» прибором.

На изображении видно несколько десятков «почтовых конвертов» — это камера. При ее перемещении также можно наблюдать облако точек (на картинке выше его нет), point cloud.
Однако, чтобы перемещаться по помещению, нужен худо-бедно какой-нибудь мобильный прибор.
Можно взять за образец следующую модель, собранной на фанере от мобильного робота:


Двух аккумуляторов 18650 хватает на 2-3 часа.
Перед тем как строить карту необходимо поработать с настройками launch файлов как самого ORB_SLAM3 так и нод камеры и imu.
Начнем с камеры.
nano /home/pi/catkin_ws/src/raspicam_node/launch/camerav2_512x512_fish.launchПоправим launch файл raspicam_node, снизив fps до 20, и выставим параметр enable_raw в true, так как ORB_SLAM3 не переваривает сжатые (image_compressed) изображения, которые по умолчанию шлет raspicam_node.
camerav2_512x512_fish.launch
<launch>
<arg name="enable_raw" default="true"/>
<arg name="enable_imv" default="false"/>
<arg name="camera_id" default="0"/>
<arg name="camera_frame_id" default="camera"/>
<arg name="camera" default="camerav2_640x480"/>
<node type="raspicam_node" pkg="raspicam_node" name="camera" output="screen">
<param name="private_topics" value="true"/>
<param name="camera_frame_id" value="$(arg camera_frame_id)"/>
<param name="enable_raw" value="$(arg enable_raw)"/>
<param name="enable_imv" value="$(arg enable_imv)"/>
<param name="camera_id" value="$(arg camera_id)"/>
<param name="camera_info_url" value="package://raspicam_node/camera_info/camerav2_640x480.yaml"/>
<param name="camera" value="$(arg camera)"/>
<param name="width" value="512"/>
<param name="height" value="512"/>
<param name="framerate" value="20"/>
<!-- <remap from="/camera/image" to="/camera/image_raw"/> -->
<!-- <remap from="/camera/image/compressed" to="/camera/image_raw"/> -->
</node>
</launch>
Разрешение лучше не трогать, так как далее в ORB_SLAM файле параметров будет использоваться файл с настройками калибровки камеры именно под картинку 512х512.
*Теперь, если планируется использовать гироскоп/акселерометр, поправим соответствующую ноду.
nano /home/pi/catkin_ws/src/ros_mpu6050_node/launch/mpu6050.launch
Здесь надо выставить частоту — 100-200 Гц, а также сделать remap (перенаправление) топиков, чтобы imu публиковал данные в топик, который будет слушать ORB_SLAM3.
mpu6050.launch
<!-- http://wiki.ros.org/roslaunch/XML/node -->
<launch>
<node name="mpu6050_node" pkg="ros_mpu6050_node" type="mpu6050_node" output="screen">
<!--<rosparam file="$(find mypackage)/config/example.yaml" command="load" />-->
<param name="frequency" type="int" value="200" />
<param name="frame_id" type="str" value="base_imu" />
<param name="ax" type="int" value="0" />
<param name="ay" type="int" value="0" />
<param name="az" type="int" value="0" />
<param name="gx" type="int" value="0" />
<param name="gy" type="int" value="0" />
<param name="gz" type="int" value="0" />
<param name="ado" type="bool" value="false" />
<param name="debug" type="bool" value="false" />
<remap from="/imu/data" to="/imu"/>
</node>
</launch>Остались настройки ORB_SLAM3
Здесь немного посложнее.
Параметры хранятся в файлах формата yaml, поэтому править необходимо их. Что мы и сделаем.
Если у вас камера типа Pinhole, то правим TUM1.yaml:
nano /home/pi/ORB_SLAM3/Examples/Monocular/TUM1.yamlесли fish-eye, в понятиях ORB_SLAM3 это тип KannalaBrandt8, то TUM-VI.yaml:
nano /home/pi/ORB_SLAM3/Examples/Monocular/TUM-VI.yamlВ целом у приведенных TUM файлов разницы немного в части содержимого.
Необходимо снизить ORBextractor.nLevels, обратить внимание на fps, разрешение 512х512, а также ORBextractor.nFeatures — количество извлекаемых фич (здесь необходим баланс производительности/ качества — меньше фич — быстрее работает, но хуже позиционируется и наоборот).
TUM-VI.yaml
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
File.version: "1.0"
Camera.type: "KannalaBrandt8"
# Camera calibration and distortion parameters (OpenCV)
Camera1.fx: 190.978477
Camera1.fy: 190.973307
Camera1.cx: 254.931706
Camera1.cy: 256.897442
# Equidistant distortion 0.0034823894022493434, 0.0007150348452162257, -0.0020532361418706202, 0.0002029$
Camera1.k1: 0.003482389402
Camera1.k2: 0.000715034845
Camera1.k3: -0.002053236141
Camera1.k4: 0.000202936736
# Camera resolution
Camera.width: 512
Camera.height: 512
# Camera frames per second
Camera.fps: 20
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000 # Tested with 1250
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.nLevels: 3 #8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1.0
Viewer.GraphLineWidth: 0.9
Viewer.PointSize: 2.0
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3.0
Viewer.ViewpointX: 0.0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -3.5
Viewer.ViewpointF: 500.0
Viewer.imageViewScale: 0.3
Запустим все (пока без ноды imu):
1-st terminal:
bash -c "source /opt/ros/noetic/setup.bash; roscore"2-d:
bash -c "source /home/pi/catkin_ws/devel/setup.bash; roslaunch usb_cam usb_cam-test.launch"либо
bash -c "source /home/pi/catkin_ws/devel/setup.bash; roslaunch raspicam_node camerav2_512x512_fish.launch"3d:
bash -c "source /home/pi/catkin_ws/devel/setup.bash;cd /home/pi/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3;
./Mono /home/pi/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/pi/ORB_SLAM3/Examples/Monocular/TUM-VI.yaml"В целом, raspberry неплохо справляется:

Однако, при резких поворотах мощностей явно не хватает.
Тем не менее, если двигаться неспеша и не дергать камерой, то можно построить «маршрут»:

Так выглядит пройтись туда и обратно с плавным разворотом камеры.
Сохранить карту, нажав на кнопку gui не получится. Такой кнопки нет. Чтобы карта записалась необходимо перед стартом ORB_SLAM3 добавить строку в TUM.yaml файл:
System.SaveAtlasToFile: "my_01"При этом карта будет сохраняться в /home/pi/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3 и называться my_01.osa.
Чтобы загрузить карту при старте ORB_SLAM, которая ранее была построена в том же TUM файле указать:
System.LoadAtlasFromFile: "my_01"ORB_SLAM3 c imu.
Пример запуска с учетом imu будет выглядеть так:
bash -c -E "source /home/pi/catkin_ws/devel/setup.bash;cd /home/pi/ORB_SLAM3/Examples_old/ROS/ORB_SLAM3;
./Mono_Inertial /home/pi/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/pi/ORB_SLAM3/Examples/Monocular-Inertial/TUM-VI_far.yaml"*с учетом уже ранее запущенных нод в других терминалах roscore, raspicam_node и собственно imu:

Не лишним будет убедиться, что imu шлет сообщения в топик imu:
rostopic echo /imu
Содержимое
TUM-VI_far.yaml
%YAML:1.0
#------------------------------------------------------------------------------$
# Camera Parameters. Adjust them!
#------------------------------------------------------------------------------$
File.version: "1.0"
Camera.type: "KannalaBrandt8"
# Camera calibration and distortion parameters (OpenCV)
Camera1.fx: 190.978477
Camera1.fy: 190.973307
Camera1.cx: 254.931706
Camera1.cy: 256.897442
# Equidistant distortion 0.0034823894022493434, 0.0007150348452162257, -0.00205$
#Camera.bFishEye: 1
Camera1.k1: 0.003482389402
Camera1.k2: 0.000715034845
Сamera1.k3: -0.002053236141
Camera1.k4: 0.000202936736
# Camera resolution
Camera.width: 512
Camera.height: 512
# Camera frames per second
Camera.fps: 3
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Transformation from body-frame (imu) to camera
IMU.T_b_c1: !!opencv-matrix
rows: 4
cols: 4
dt: f
data: [-0.9995250378696743, 0.0075019185074052044, -0.02989013031643309, 0.045574835649698026,
0.029615343885863205, -0.03439736061393144, -0.998969345370175, -0.071161801837997044,
-0.008522328211654736, -0.9993800792498829, 0.03415885127385616, -0.044681254117144367,
0.0, 0.0, 0.0, 1.0]
# IMU noise (Use those from VINS-mono)
IMU.NoiseGyro: 0.004 # 0.00016 (TUM) # 0.00016 # rad/s^0.5
IMU.NoiseAcc: 0.04 # 0.0028 (TUM) # 0.0028 # m/s^1.5
IMU.GyroWalk: 0.000022 #(VINS and TUM) rad/s^1.5
IMU.AccWalk: 0.0004 # 0.00086 # 0.00086 # m/s^2.5
IMU.Frequency: 100.0
System.thFarPoints: 3.0
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000 # Tested with 1250
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 3 #8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1.0
Viewer.GraphLineWidth: 0.9
Viewer.PointSize: 2.0
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3.0
Viewer.ViewpointX: 0.0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -3.5
Viewer.ViewpointF: 500.0Здесь необходимо обратить внимание на IMU.Frequency: 100.0 и System.thFarPoints: 3.0.
Частоту imu необходимо будет поменять в launch файле imu ноды с 200 на 100.
System.thFarPoints — это расстояние, дальше которого ORB_SLAM не будет извлекать фичи из изображения.
На этом пока все.
Userpc0101
И что с imu стало лучше или хуже? Это только для получения позиции камеры, тут можно с RGBD камерой строить воксельные карты с обходом препяствий?
zoldaten Автор
С imu 6050 просто отвратительно. Вылетает через n-е количество времени, хотя направление перемещения показывает верно. Думаю, без калибровки тут точно не обойтись. Калибровки связки camera-imu. Как раз думаю про kalibr написать. Наверняка слышали про такой.
Пример с RGBD также должен работать, т.к. нода под него собирается.
Также есть мысль, что дело не только в производительно raspberry, сколько в ...камере.
Собрана подобная мобильная платформа на базе intel nuc i5+ubuntu+ros noetic+с270 usb camera.
Так вот, производительности хватает с избытком, но иногда случаются фризы картинки. Я это связываю c rolling shutter. Из-за эффекта размытия картинки алгоритм теряет позицию и начинает заново отстраивать карту. Думаю, попробовать global shutter камеру.
Вашу статью прочитал, на каком решении вы остановились в вопросе обхода препятствий?
Userpc0101
Я сейчас делаю воксельную карту https://youtu.be/OJWtfqJcT9c, https://youtu.be/VmEpy09D05I думаю использовать A* для построения оптимальной траектории, в основном мало внимания уделял позиции камеры т.к. есть решения а-ля t265 от интел, но пробовал RTAB-MAP в принципе работает не плохо, использовать одну камеру для отслеживания и обхода препяствия это маст хэв, но из документации интела это будет проигрывать связке RGBD + track camera т.к. поле зрения у t265 больше а задержки меньше, частота обновления позиции порядка 250Гц... Поэтому главный приоритет, обход препяствий по оптимальной траектории с 3х мерной картой препяствий тут насколько я понял пока нет готового решения.
zoldaten Автор
t265 - отличный вариант со встроенным imu, двумя fisheye, жаль цена велика.
Userpc0101
По поводу фризов картинки для получения изображения вы используете v4l либо libcamera и на какой версии raspberian, buster либо bullseye? Я встречался с проблемой фризов на StereoPi v2 с камерами ov9281 с глобальным затвором и внешним триггрером для синхронизации камер, мне кажется это не rolling shutter а экспозиция уменьшите её, если время экспозиции превышает время подготовки кадрового буфера (который в свою очередь зависит от тактирования, частоты кадров камеры) могут быть фризы на камере. Также мне любопытно как вы решили проблему автоматической настройки усиления и экспозиции камеры, ваша камера поддерживается в ISP на Raspberry?
zoldaten Автор
Используется raspbian buster и ubuntu 20.04, т.к. под них собирается ROS Noetic.
Если уменьшать экспозицию, нужно добавлять свет, что не всегда доступно.
На raspberry я использую обычную шлейфовую csi камеру.
У raspicam node есть dinamic reconfigure и можно на лету поменять настройки и сразу посмотреть как это влияет на камеру. У usbcam node таких настроек совсем немного.
Userpc0101
В таком случае у вас вероятно используется проприетарный бэк камеры от broadcom, raspvid работает нормально?
zoldaten Автор
все верно, нормально.
Userpc0101
Немного странно:
camerav2_640x480не дотягивает по высоте до 512, попробуйте так:.launch