В апреле этого года Сколковский институт науки и технологий («Сколтех») представил концепцию модульного марсохода, состоящего из четырёх двухколёсных роботов. Роботы могут функционировать по отдельности или собираться в разных комбинациях, реализуя принцип кооперативной робототехники. Информационная служба Хабра обратилась в пресс-службу «Сколтеха» с просьбой предоставить дополнительную информацию по проекту и ответить на пару вопросов. На вопросы редакции ответил доцент института и один из авторов проекта Антон Иванов.
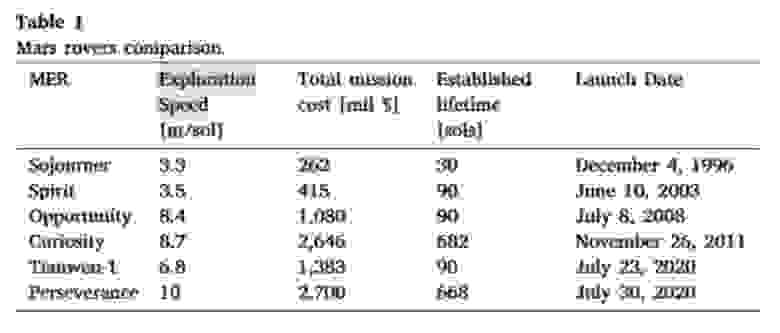
Как указывают авторы проекта, на текущий момент отправленные на планету марсоходы представляют собой шестиколёсные платформы с полезной нагрузкой в виде исследовательских инструментов. При этом за последние годы суточная дальность хода в режиме исследования или так называемая Exploration Speed (м/сол) существенно не изменилась. В частности, суточная дальность запущенного в 2008 году «Оппортьюнити» составляет 8,4 м/сол, то есть он проезжает 8,4 метра за марсианские сутки (сол). В свою очередь суточная дальность запущенного в 2020 году «Персеверанса» составляет 10 м/сол.
Работа над новыми проектами марсоходов по всему миру в основном заключается в увеличении суточной дальности хода без ущерба для исследовательской деятельности. Кроме того, как указывал первый автор исследования, аспирант «Сколтеха» Александр Петровский, перед учёными стояла задача оптимизации проекта: «как добиться наибольшего времени работы и покрыть максимальное расстояние, не раздув донельзя бюджет». Исследователи предполагают, что это можно сделать за счёт реализации концепции групповой робототехники и отправки на Марс сразу нескольких небольших роботов, оснащённых разным оборудованием. Они могут как разъезжаться в разных направлениях, так и состыковываться для выполнения более сложных задач.
Одним из источников вдохновения авторов стал двухколёсный робот Handle компании Boston Dynamics, использующийся на складах для перевоза грузов и других задач. Кроме того, как указывали учёные, в июне 2021 года в Краснодарском крае «Сколтех» проводил испытания двухколёсных роботов, используя их для мониторинга роста сельхозкультур и обнаружения вредителей и больных растений. Авторы считают, что модульный подход можно применить и в поисково-спасательных операциях..
Проект «Сколтеха» носит название TWRS (Two-wheeled robotic swarm) и определяется как роботизированная система, состоящая из четырёх эквивалентных блоков, взаимодействующих для достижения общей цели. Это так называемый небольшой рой роботов. Большинство решений должно приниматься самим роем с распределением задач между отдельными модулями. Каждый модуль, он же двухколёсный робот, носит свою полезную нагрузку в виде определённого инструмента, который не дублируется на других элементах.
При этом у каждого модуля есть критически важные для индивидуальной работы подсистемы: Multi-Mission Radioisotope Thermoelectric Generator (MMRTG), батареи, вычислительная подсистема для стабилизации двухколёсной платформы, локализации, навигации, предотвращения столкновений в непосредственной близости от других роботов, набор необходимых датчиков и не только. Даже в случае выхода из строя трёх роботов, четвёртый продолжит выполнять выделенные ему исследовательские задачи и передавать информацию на Землю. Для манипуляций, требующих повышенной устойчивости, два или больше роботов могут пристыковаться друг к другу. например, в ситуациях, когда необходим забор грунта.
Согласно задумке, рой может содержать те же научные инструменты, что и предшественники-марсоходы, а именно:
рентгеновский флуориметрический спектрометр — Planetary Instrument for X-ray Lithochemistry (PIXL);
георадар Radar Imager for Mars’ subsurface experiment (RIMFAX);
метеорологическую систему — Mars Environmental Dynamics Analyzer (MEDA);
экспериментальную установку для получения кислорода — Mars Oxygen ISRU Experiment (MOXIE);
набор инструментов дистанционного зондирования — SuperCam;
мультиспектральный стереоскопический прибор для получения изображений — Mastcam-Z;
ультрафиолетовый рамановский спектрометр — Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals (SHERLOC);
17 дополнительных камер и 2 микрофона.
Предполагаемая суточная дальность хода двухколёсных роботов рассчитывалась, исходя из известных данных о полевой работе уже функционирующих марсоходов, испытаний прототипа TWRS и других смежных показателей. Согласно прототипной установке, максимальная линейная скорость на твёрдом ровном грунте для одного двухколесного робота составляет 119 м/час. Но робот не просто так ездит по планете. Он проводит исследования, собирает грунт, анализирует данные и проводит другие манипуляции. Авторы предположили, что, с учётом этих нюансов, суточная дальность хода в режиме исследования при движении по ровной поверхности может составлять 30% от максимальной линейной скорости, то есть примерно 38,4 м/час. Марсоход будет функционировать в разобранном состоянии лишь около 20% времени. В собранном состоянии, по предположению исследователей, суточная дальность хода в режиме исследования должна составлять 23,2 м/сол.

Прототип робота способен преодолевать препятствия высотой до 28 см, сохраняя вертикальное положение. Он состоит из нескольких модулей: колёса, адаптивная подвеска, обеспечивающая стабилизацию в плоскости, корпус с вычислительными системами и необходимой электроникой, голова с камерами и датчиками для автономной локализации, навигации и предотвращения столкновений. Размеры масштабированного прототипа составляют: длина - 0,42 м, ширина - 0,84 м, высота - 1,57 м. Масса робота без полезной нагрузки составляет 109,4 кг. Общая масса полезной нагрузки составляет около 670 кг без учёта системы питания. Авторы предполагают, что их система может увеличить длительность марсианских исследовательский миссий в среднем на 1222 сол.

После прочтения научной работы у редакции Хабра осталось несколько вопросов относительно проекта, нераскрытых или слабо раскрытых в исследовании. Мы обратились с запросом в пресс-службу «Сколтеха». На наши вопросы ответил один из авторов концепции, доцент института Антон Иванов.
Какие материалы планируется использовать при создании робота?
Особенных материалов не планируется. Всё сравнительно стандартно: алюминий, пластик, все они применяются в стандартных робототехнических системах. На стадии прототипа не учитываются особые требования космоса. Инновационный фокус проекта не на материалах, а на алгоритме балансировки робота для достижения устойчивости при перемещении.
ЭКБ будет целиком российская, в сотрудничестве с ГК «Ростех», или планируются зарубежные компоненты, например из Китая?
В настоящее время работы с ГК «Ростех» не планируется. Робот задумывался года полтора назад. В основном электронно-компонентная база зарубежная — компоненты, доступные в российских магазинах электроники.
Программное обеспечение будет исключительно отечественным, или планируется совместное производство с зарубежными странами, такими как Китай или Индия?
Да, исключительно отечественное ПО — разработка наших инженеров и программистов. Более того, всё разработано в «Сколтехе».
Какие прогнозы на создание проекта, примерно через сколько он может быть готов и отправлен на Марс?
В настоящее время мы работаем над прототипом устройства. В случае, если такую миссию одобрят, создание робота, способного выполнять задачи на Марсе, займёт около трёх лет. В основном это время уйдёт на тестирование работы механизмов в марсианских условиях и совершенствование алгоритмов управления для обеспечения полной автономности робота. Прототип всегда занимает меньше времени, чем доведение до лётного образца.
Планируется ли на основе данного марсохода создать модели для других планет, например, для лун Юпитера? Материалы для этих моделей будут другими? Сам концепт марсохода останется прежним?
Та же концепция может использоваться для любой поверхности с невысокой шероховатостью, подобной тому, что мы наблюдаем на Марсе. Что касается лун Юпитера или Сатурна, то потребуется доработать защиту от радиации, но в остальном подойдёт та же конструкция робота. Радиационный фон на Марсе значительно превышает земной, но вблизи Юпитера он несравненно выше.
По результатам испытаний возможна замена материалов робота на такие, которые позволят адаптировать его к условиям: низким температурам, резким перепадам температур, наличию пыли. На Марсе средняя температура составляет порядка −60° Цельсия, и материалы для функционирования робота в таких условиях понадобятся соответствующие.
В чём преимущество двухколёсного робота перед обычными марсоходами? Если робот стоит на двух «ногах», это значит, есть система, которая помогает ему балансировать, не накладывает ли это дополнительные расходы электроэнергии?
Двухколёсный робот обладает повышенной мобильностью и маневренностью по сравнению с классической схемой, в которой, как правило, шесть колёс.
Естественно, система управления будет съедать определённое количество энергии, поэтому двухколёсный робот будет иметь более ограниченный запас хода по сравнению с классическим марсоходом. Предполагается, что двухколёсные роботы будут использовать марсоход как базовую станцию, к которой можно пристыковываться для перезарядки между «вылазками». То есть маленький робот является самостоятельным сенсором, который может исследовать объекты на расстоянии, экономя ресурсы основной платформы.
Как двухколёсный робот собирается преодолевать препятствия в виде камней и прочую сложную местность?
У этого робота будет максимальный порог шероховатости поверхности, после которого поверхность становится непроходимой — тогда её нужно объезжать. В ходе тестирования мы установим, какого вида препятствия робот способен преодолевать, и у него будет система распознавания, которая позволит определить, нужно ли то или иное препятствие объезжать или преодолевать.
Устойчива ли конструкция к агрессивной погодной среде: ветру и бурям?
На Марсе в сто раз менее плотная атмосфера, чем на Земле. Поэтому порывы ветра не будут представлять угрозы для устойчивости робота. У спутников Юпитера вовсе нет атмосферы. Что касается земных условий, то максимальная скорость ветра, при которой можно работать, будет определена в ходе тестирования.
***
Подробности проекта опубликованы в статье в журнале Acta Astronautica — The two-wheeled robotic swarm concept for Mars exploration, doi: 10.1016/j.actaastro.2022.01.025.
Комментарии (24)





Scootaloo
30.05.2022 17:28+2Я может что-то не понимаю, но что за странные цифры про 10 метров в сол?...
Скорость Perseverance составляет до 0.1 МИЛИ В ЧАС, то есть почти 4 километра в марсианский сол, если он вдруг будет шпарить 24 часа без перерыва. Фактически же в сол он проходит порядка 300 ярдов (270 метров), что почти в тридцать раз больше, чем озвученные вами цифры.
https://www.jpl.nasa.gov/videos/nasas-self-driving-perseverance-mars-rover-is-breaking-records
Упомянутый вами же Оportunity имел максимальную скорость 0.18 км/ч, а фактически, с протоколами безопасности, ползал где-то на 36 м/ч и за сол проходил чуть более 200 метровhttps://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=2003-032A
То есть скорость марсоходов, которые вы привели в пример, выросла практически на треть и речь идёт не о двух, а о почти сотне метров разницы в скорости. О какой науке вообще может идти речь, когда ключевые цифры, на которые опирается статья, выдуманы или взяты с потолка? И я даже не знаю, открыть статью по ссылке мне не удалось (честно, редко посещаю такие сайты и не умею ими пользоваться, каюсь, туповат), это здесь косяк? Или в статье реально так, данные о других марсоходах взяты с потолка, а российское творение реально обещает такие смешные цифры?

ancotir Автор
30.05.2022 18:12Формула, по которой считали скорость для марсоходов Сколтеха ниже, где:
???? is the angle of deviation from the vertical, ???? is the angle of rotation of the wheel, R is the radius of the wheel, L is the distance from the center of mass of the robot to the center of the wheel, ???? is the rolling friction coefficient for the case when the robot travels on flat harground, and ???? is the time.
*

Таблица со сравнением из исследования:
П.С. пдф исследования могу прислать, дайте почту в лс. Кто ещё хочет также может мне свою почту дать.
Loskechos
02.06.2022 06:30это что за скобка то такая получается в которой метры с коэффициентом трения складываются? а в итоге размерность скорости получается [м]. Вообще чудесное творение в котором скорость есть функция зависимости угла поворота колеса.... нобелевскую премию этим господам
ancotir Автор
30.05.2022 18:26Он никак не может в среднем проходить 270 метров с сол. В противном случае при 454 солах на Марсе он бы не 11,64 км уже накопил, а около 122 км.
6 февраля этого года НАСА заявляло, что марсоход проехал рекордные (!!!) 245,76 метров за сол.
https://twitter.com/NASAPersevere/status/1490155191257030656?ref_src=twsrc^tfw
Scootaloo
31.05.2022 10:51Я опущу вопросы в духе "где в формуле учитываются расходы времени на научную деятельность?". Хотя Персик явно прошёл 11.6 км не потому, что медленный, а потому что жизнь марсохода состоит не из бесконечной езды, а в расчёте участвуют только параметры, оказывающие влияние на максимальную скорость. Бог с ним.
Вы только что сами привели цифры, которые, пусть и ниже озвученных мной, всё равно значительно превышают озвученные вами в статье - 11.64 км за 454 сола это 25.6 м/сол, а не 10. И это превосходит показатели Опортьюнити даже не на треть, как заявил я выше, а втрое.
То есть, я правильно понимаю, что вы сами подтвердили оба тезиса - о заниженных цифрах и о том, что новые марсоходы значительно эффективней, а не то, что сказано в статье?Скиньте, пожалуйста, статью на stase-dima@yandex.ru. Очень уж интересно посмотреть, как эта сова была натянута на марсианский глобус
p.s.
Окей, ниже я прочёл комментарий от вас, что данные брались, основываясь на август прошлого года... но зачем публиковать утратившие свою актуальность статьи?ancotir Автор
31.05.2022 11:25Ну вообще Оппортьюнити по расчетам так и получается — 8,4, как и в статье. Поскольку миссия уже завершилась, текущие расчёты соответствуют представленным в статье. Ниже они есть, посмотрите.
Научная статья публикуется не день в день. Пока проверялся препринт и проводились прочие необходимые перед публикацией мероприятия, Персеверанс ехал дальше, расстояние накопилось и средняя скорость изменилась. Поэтому цифры потеряли актуальность. Мне казалось, это очевидно.
Скорость рассчитывается исходя из деления общего пройденного расстояния в метрах на солы, то есть фактическое расстояние на фактические солы, а не заложенные параметры прототипа и возможную максимальную скорость. Исследователи должны исходить из фактических данных, а не гипотетических или двух-трёх случаях, когда марсоход проходил до 270+ метров максимум при идеальных условиях.
ancotir Автор
30.05.2022 19:06Карта передвижений Персеверанса ниже. По ней можно посмотреть, как быстро движется марсоход.
https://mars.nasa.gov/mars2020/mission/where-is-the-rover/
Что касается Опортьюнити. Он проработал на Марсе 14 лет и 195 дней, пройдя 45 км. Исходя из общего расстояния и проведённого времени (даже не учитывая 2018-2019 год в режиме покоя) никак не получится средняя скорость 200 метров за сол.
45000/((14*365)+195)= 8,48 м/сол (Если считать год за 365 дней).

DrZlodberg
31.05.2022 10:39Будет передвигаться как гусеница, на пузе. По скорости подходит, да и по рыхлому песку явно будет надежнее, чем такая схема.


daylightcat
30.05.2022 17:29@ancotir, вас обманывают, а вы не проверяете:
В частности, суточная дальность запущенного в 2008 году «Оппортьюнити» составляет 8,4 м/сол, то есть он проезжает 8,4 метра за марсианские сутки (сол). В свою очередь суточная дальность запущенного в 2020 году «Персеверанса» составляет 10 м/сол.
Тогда как тут взять общий пробег в 11,64 км, что средний пробег Preservance за один сол 26,8 м, а тут можно видеть, что максимальный пробег составляет 169,85 м.
ancotir Автор
30.05.2022 18:08Не поняла Вас, если честно. Если что, поправьте. Общий пробег марсохода сейчас 11,64 км, в метрах 11640 метров, завершённых солов у Персеверанса прямо сейчас — 454. То есть даже если ссылаться на эти данные, получается 26 м/сол. Если брать данные от сентября прошлого года, то получится 12 м/сол, август — 10,3 м/сол. Это по сайту НАСА.
Авторы считали аналогичным образом, деля общий пройденный путь на солы. Кроме того, данные собирались до момента, когда марсоход преодолел рекордный путь в 245,76 метров всего за сол в феврале этого года. То есть максимальный пробег не 169,85, а 245,76 за сол.daylightcat
30.05.2022 22:15Да уж мой комментарий оказался плох во всех отношениях: "я буду перечитывать написанное перед отправкой", ну и не учел, что миссия продолжается, а авторы пользовались данными на момент написания статьи.

Stas911
30.05.2022 20:28А в чем смысл большой скорости перемещения? Так-то MRO еще быстрее вокруг носится, хоть и не по поверхности...

katok535
30.05.2022 20:58видимо, в возможности доехать из точки А, представляющей особый интерес для науки, в следующую такую точку В в течение срока работоспособности аппарата. Чем быстрее ездит марсоход, тем более интересные открытия возможны, даже если собственно наблюдения он проводит остановившись.
Ограничение скорости на сегодня - ручное телеуправление. Видимо, в безопасной, хорошо просматриваемой по ходу движения местности, марсоход может совершать рекордные "марш-броски" по прямой.
Как только доведут до ума полуавтоматическое следование курсу с огибанием препятствий, пробеги роверов смогут значительно увеличиться.

RusikR2D2
30.05.2022 21:39+1Судя по всему, большую часть времени марсоход стоит. А такая конструкция будет тратить электричество (кстати, от чего она вообще питаться будет? - солнечные батареи? Немного сомнительно на самобалансирующем роботе) даже если стоит - на балансировку. А заодно ресурс двигателей и электроники. Или при каждой остановке надо "приседать" на боковые упоры, рискуя опрокинуться.
Loskechos
02.06.2022 06:36Авторы предполагают, что их система может увеличить длительность марсианских исследовательский миссий в среднем на 1222 сол.
За счет чего? Цифра от балды?
QDeathNick
Громозека вообще на одном колесе наливал. Вот к чему надо стремиться.
ancotir Автор
По мультику не Громозека, а одноколёсный робот-официант им приносил еду и наливал, когда они с Селезнёвым встретились. В книге я тоже не помню у него одно колесо.
Stas911
Официант еще и подносы тягал с едой переменного веса, тч его алгоритм балансировки покруче будет.
Tarakanator
GizmoDuck ещё есть
https://pikabu.ru/story/sbyilis_mechtyi_7826610