
Модульными называются роботы, структура которых может изменяться с помощью добавления узлов, самостоятельных по отдельности. Они могут быть полезны в разных областях — от разработки игр до медицины и космонавтики.
Под катом собрали перспективные проекты модульных роботов. Как они работают, каких бывают форм и какие у них проблемы в реализации — рассказываем в подборке.
M-Blocks. Прямиком из MIT
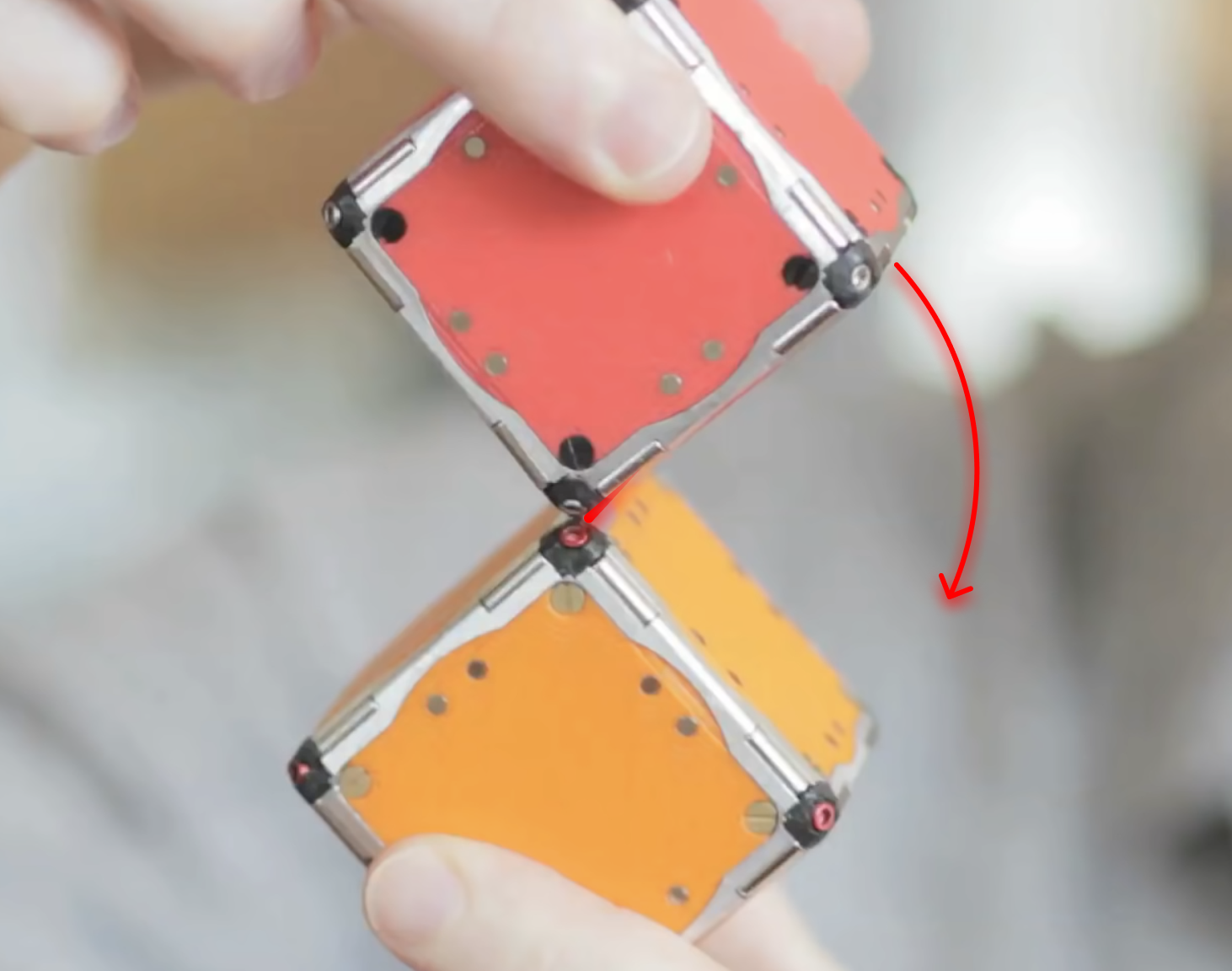
Одним из первопроходцев в мире модульной робототехники стал молодой инженер Джон Романишин. В 2013 году он создал схему для самосборки роботов. Небольшие кубики без внешних подвижных частей могут передвигаться, прыгать друг на друга и соединяться. Технология получила название M-Blocks.

M-Blocks, без корпуса. Источник
Презентация проекта
Поначалу мало кто верил в разработку. В 2011 году Джон показал дизайн M-Blocks профессору робототехники Даниэле Рус. Она сказала, что это невозможно сделать, но через два года показала проект своему коллеге, исследователю в Корнельском университете. Он подтвердил нереализуемость разработки.
Позже Даниэла признала ошибку и поддержала Джона. Через два года он продемонстрировал свою разработку на Международной конференции IROS, тем самым доказав работоспособность M-Blocks.
Демонстрация проекта Джона Романишина. Теперь уже совместно с профессором Даниэлой Рус.
Как это работает
Магии здесь нет: кубы могут перемещаться без внешних подвижных элементов.
Внутри каждого установлен маховик, вращающийся со скоростью 20 000 оборотов в минуту. В момент резкой остановки «создается» инерция, побуждающая куб двигаться в определенном направлении.
Чтобы кубы стыковались между собой, на ребрах каждого из них есть цилиндрические магниты. Когда два куба сближаются, магниты поворачиваются друг к другу разноименными полюсами.
Когда кубы далеко друг от друга, они передвигаются почти хаотично: прыгают в разные стороны и делают сальто. Зато вблизи работают по принципу «скользящего куба». Так называется эффект, когда один куб двигается вдоль другого, вокруг общей оси — намагниченного ребра.
Фрагмент из видеоролика
Вторая версия и штрих-коды
В первой версии M-Blocks кубы передвигались почти хаотично, с помощью динамики и магнитного воздействия. Им не хватало «осознанности».
Через шесть лет вышла вторая версия проекта. Кубы-роботы «научились» общаться друг с другом, используя систему, напоминающую штрих-код. На каждой из граней есть свой код для идентификации. Также в каждом блоке установлены датчики для считывания направлений и световых сигналов. Так они могут распознавать друг друга и собираться в нужные структуры.
Демонстрация работы M-Blocks 2.0. Обратите внимание на световую сигнализацию.
Мечты и перспективы
Сегодня проект M-Blocks поддерживают Национальный научный фонд и Amazon Robotics. Есть надежда на дальнейшую миниатюризацию устройства. Одна из целей проектов, подобных M-Blocks, — создать систему микроботов, способную собираться в сложные структуры.
Напрашивается пример из «Мстителей», — боевой костюм из микроскопических роботов. Но до этого еще далеко. Пока реальным кажется использование модульных роботов M-Blocks, например, в интерактивных играх.
«Мы хотим, чтобы сотни кубиков, разбросанных случайным образом по полу, могли идентифицировать друг друга, объединяться и собираться в стул, лестницу или стол», – Джон Романишин, основатель проекта M-Blocks.
Сферические роботы
FreeBOT
Еще один выходец Международной конференции IEEE/RSJ по интеллектуальным роботам (IROS) — проект ученых из университета Шэньчжэнь. В 2020 году они представили модульного робота FreeBOT.

FreeBOT. Источник
Как это работает
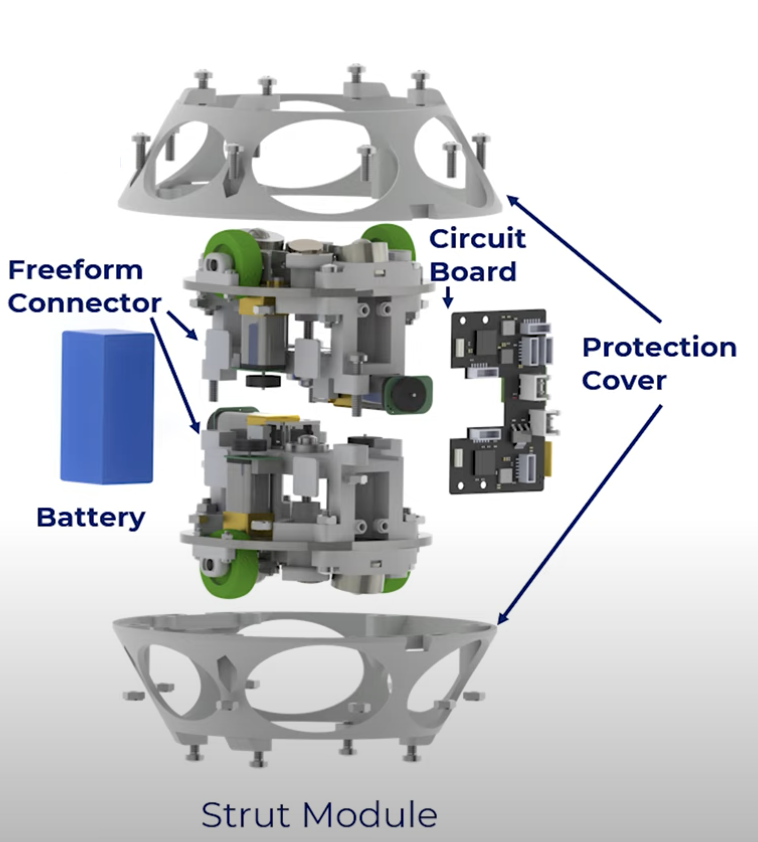
Визуально — полная противоположность M-Blocks. Модули состоят из железных сфер, внутри которых два колеса, моторчик, магнит, плата и батарейка. С помощью колес возникает вращение и движение сферы по поверхности. Похожее устройство у известного робота BB-8 производства Sphero.

Устройство сферы FreeBOT. Источник
Магнит направляет конструкцию и позволяет соединять сферы между собой. Благодаря ферромагнитному корпусу сферы сильнее прилипают друг к другу. Магнитомягкие свойства железного корпуса позволяют сферам легко разъединяться. Достаточно увести магнит в другую сторону.
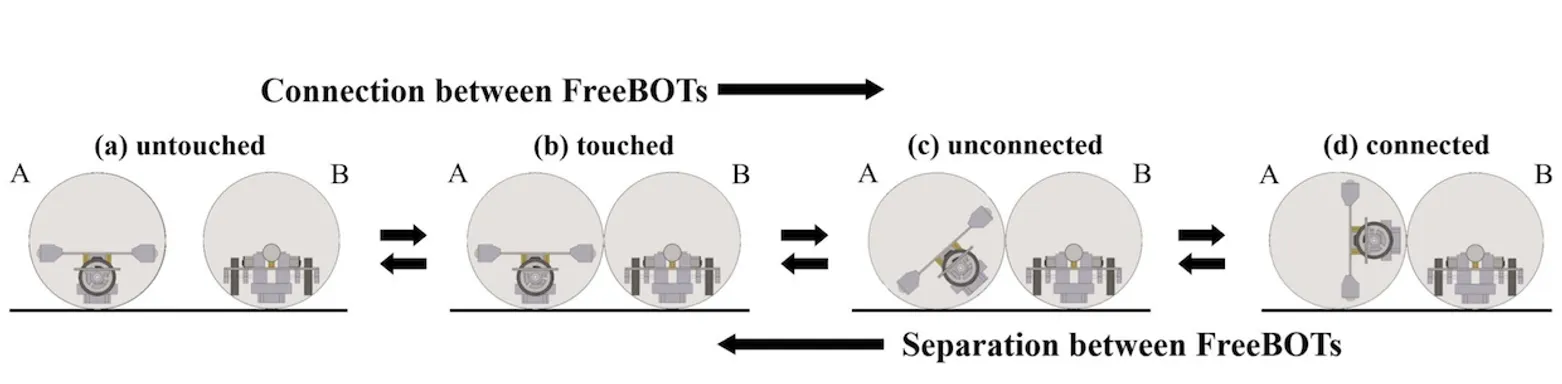
Взаимодействия сфер FreeBOT. Источник
Что стало с проектом сегодня
Модульный робот FreeBOT получил продолжение в самостоятельном проекте FreeSN. Это тот же модульный робот, но с другой концепцией: теперь есть «управляющие» и «дочерние» узлы. «Управляющие» узлы, можно сказать, занимаются перестановками «дочерних». Не нужно размещать полноценный механизм внутри каждой из сфер.
Устройство «управляющего» модуля
Сегодня FreeSN может воплощать различные структуры — мосты, треноги и др.
Также робот умеет перемещать тяжелые объекты:
Пример перемещения объекта с помощью FreeSN
Модульный робот из улиток
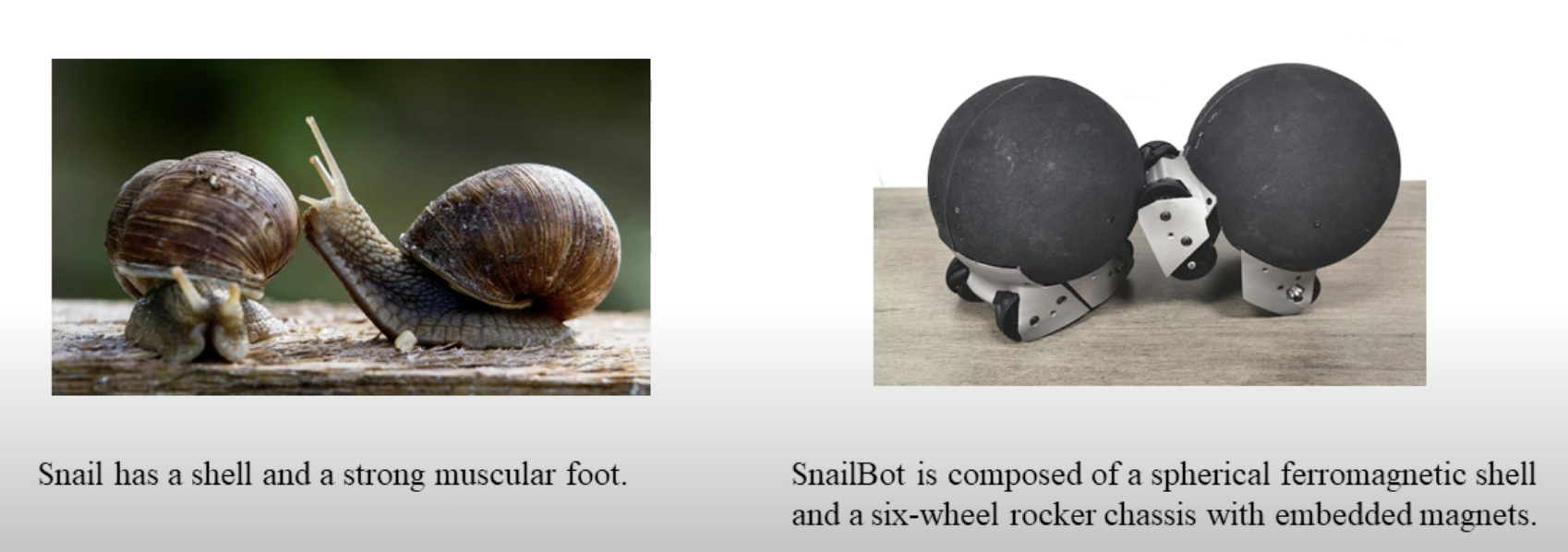
Кроме FreeSN авторы разработали новый самостоятельный проект SnailBot. Ориентиром для него стали улитки.
Источник
Идея сохранилась: модули объединяются в структуры с помощью магнитов. Но были добавлены шасси с шестью колесами в основании корпуса.

CAD-модель SnailBot. Источник
Благодаря внешней конструкции робот стал мобильней. Авторы утверждают, что такой механизм может повысить эффективность перестройки структуры и уменьшить количество сбоев при стыковке узлов.
Какой проект ученых из Гонконга станет «ключевым» — узнаем в следующих апдейтах. За успехами китайских роботостроителей можно следить на канале Robotics & AI Lab — CUHK Shenzhen.

Mori. Робот-оригами
Как говорилось ранее, модульные роботы могут создавать различные структуры. Главное их свойство — способность к реконфигурации, то есть к переустройству сборки.
Все предыдущие претенденты на звание «самого реконфигурируемого робота» были громозкими по сравнению с роботом-оригами Mori. Основа этого робота — треугольные модули. Проект был основан исследователями из Политехнической Школы Лозанны в 2016 году.
С помощью треугольных модулей можно собирать структуры плотной компоновки — как и в случае M-Blocks, зазоры минимальны.
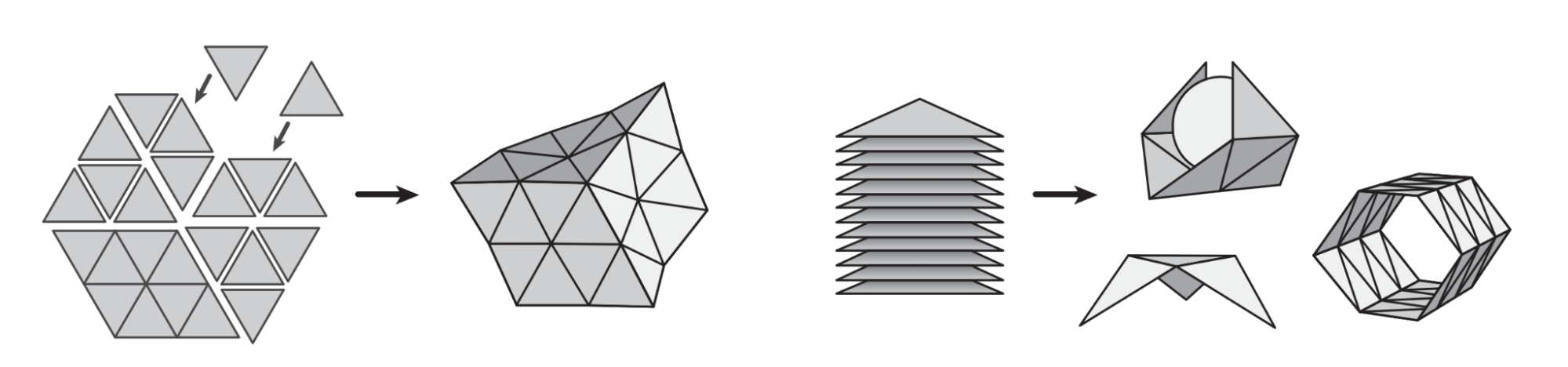
Структуры. Источник
Перспективы оригами
Благодаря структуре и толщине роботов-оригами можно создавать различные двумерные «решетки». Потенциально их можно применить в умной «броне». Свойства оригами позволяют повторять сложные геометрические формы.
Источник
Также можно найти им применение в космонавтике. Например, в реконфигурируемых спутниковых батареях. Тогда космический мусор не сможет обесточить космический аппарат.
Устройство и его минусы
Как и в FreeSN, робот-оригами состоит из «дочерних» и «управляющих» узлов. Последние занимаются перестановками, через них происходит управление.
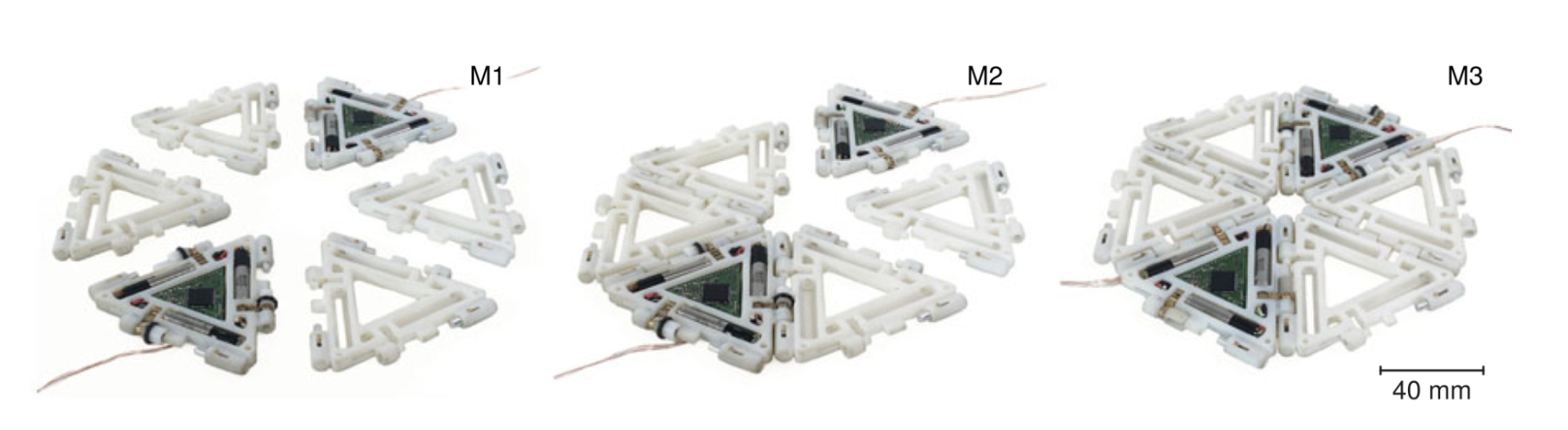
Структура оригами-робота. Источник
Длина каждого из модулей составляет 70 мм, толщина — 6 мм, а вес — 26 г. Это оптимальные параметры для реконфигураций. Напомним, что в M-Blocks система «управляющие-дочерние» невозможна из-за массы узлов.

Mori, устройство модуля. Источник
Через плату происходит управление моторчиками и шарнирами. С помощью них робот может перемещаться по поверхности. Авторы не скрывают, что для перемещения нужна ровная поверхность. Это первый минус.
Второй минус — стыковка с другими узлами неосуществима без участия человека. Это показано в видеопрезентации проекта. Также каждый из модулей управляется по отдельности. Авторы еще не реализовали межмодульную сигнализацию, когда можно управлять всей структурой через один «несущий» модуль.
Видеопрезентация проекта Mori
Третий минус — отсутствие внутреннего источника питания. К каждому из «управляющих» модулей протянуты провода для питания самой платы. Напомним, что в M-Blocks, FreeBOT, FreeSN и SnailBot используют внутренние источники питания. Но как их заряжать без разрушения структуры? Вопрос остается открытым.
Комментарии (11)

moonbow
19.07.2022 20:30так кажется один известный мультфильм начинался) с микроботами
R7R
20.07.2022 15:34+1Небольшие кубики без внешних подвижных частей могут передвигаться, прыгать друг на друга и соединяться.
Ооо! Инерциоиды уже в железе :)
«Инерцио́ид, инерцо́ид, инерционный движитель (ошибочное название «инерционный двигатель») — механизм, устройство или же аппарат, якобы способные приходить в поступательное движение в пространстве (или по поверхности) без взаимодействия с окружающей средой, а лишь за счет перемещения рабочего тела, находящегося внутри…
… Возможность создания такого движителя отрицается современной наукой из-за противоречия закону сохранения импульса. Критики, не отрицая возможности существования неизвестных физических взаимодействий, настаивают на том, что эффекты таких взаимодействий должны быть на много порядков слабее, чем нужно для их обнаружения и использования в устройствах наподобие предлагаемых авторами.» (с)
Это Википедия тормозит или тут просто фокусы на видео? :)
Doctor_IT Автор
20.07.2022 18:05+1Здравствуйте! Википедия немного тормозит)
Дело в том, что некоторые из первых изобретателей инерциоидов описывали принципы его работы неправильно.
Один из случаев рассмотрен в учебнике «О возможном и невозможном в науке» авторства Хазена. Там история о том, как изобретатель В. Н. Толчин презентовал свой инерциоид под заголовком «Я нарушил закон сохранения импульса». После — опровержение автором книги. Примерно 25 страница.
R7R
20.07.2022 18:55как изобретатель В. Н. Толчин презентовал свой инерциоид
Тема очень старая.
Я познакомился с ней, читая статью А. Ратова «Он изобрел… внутриход» в журнале Моделист-Конструктор, 1975, № 5 стр. 33.
Но те объяснения плохо подходят для сабжевых устройств…

Mike_666
20.07.2022 18:36+1Так корпус модуля очень даже взаимодействует с окружающей средой.
R7R
20.07.2022 18:47Так корпус модуля очень даже взаимодействует с окружающей средой.
«Внутри каждого установлен маховик, вращающийся со скоростью 20 000 оборотов в минуту. В момент резкой остановки «создается» инерция, побуждающая куб двигаться в определенном направлении». (с) текст данной статьи.
+ цитата из вики:
"… способные приходить в поступательное движение в пространстве (или по поверхности) без взаимодействия с окружающей средой, а лишь за счет перемещения рабочего тела, находящегося внутри…"
ElThundercloud
Давненько слежу за этой темой. К сожалению, на данный момент роботы представляют из себя исключительно игрушки. Будет интересно увидеть потенциальные коммерческие применения в будущем.
vassabi
ну, начать хотя бы с того, что пока что они не на 100% изготавливаются роботами, а есть участки с человеческим трудом или контролем :)