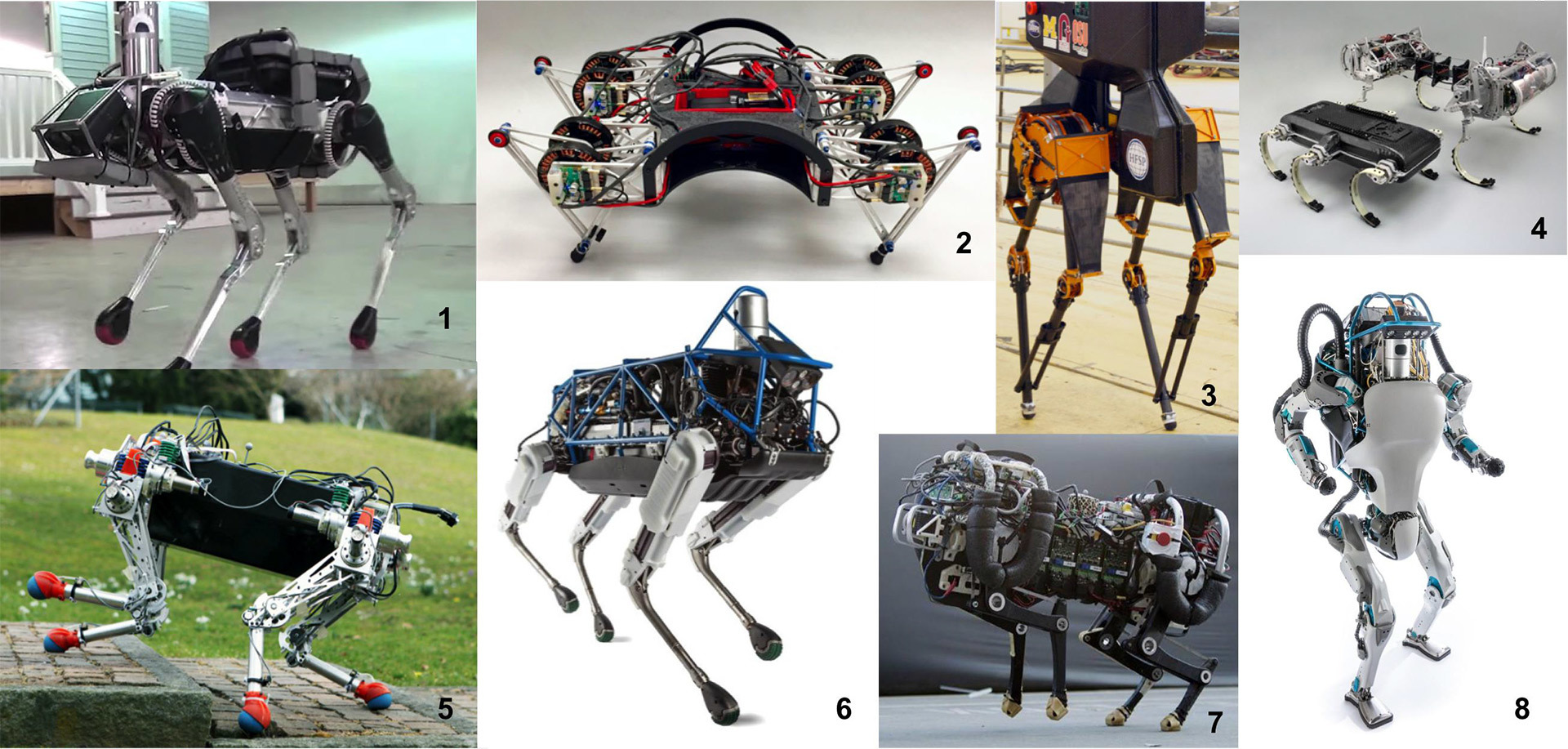
Некоторые из существующих роботов, способных на энергичные движения ногами: 1) Boston Dynamics SpotMini; 2) UPenn/Ghost Robotics Minitaur; 3) ATRIAS; 4) RHex и Canid; 5) StarlETH; 6) Boston Dynamics Spot; 7) MIT Cheetah; 8) Boston Dynamics Atlas. Иллюстрация: Саймон Калуче/Университет Карнеги-Меллона
За редким исключением (см. выше), современные двуногие или четвероногие роботы не способны на энергичные динамичные движения. Роботы-гуманоиды почти никогда не умеют бегать и прыгать, а четвероногие роботы только недавно освоили базовые навыки динамических передвижений. А ведь это очень важный навык для любого робота, который перемещается по пересечённой местности и преодолевает препятствия. Получается, что для них остаются недоступными больше половины земной суши. Они просто не могут туда попасть. Это серьёзно ограничивает сферу применения роботов, ведь они должны быть вездесущими.
Как видно на иллюстрации, инженеры до сих пор не могут определиться, какая конструкция ног будет наиболее эффективной для робота. Предлагаются разные варианты. На фотографиях показаны роботы с разным строением ноги: прямая нога (prismatic), сочленённая (series articulated), избыточно сочленённая (redundantly articulated) и плоская параллельная (parallel planar).
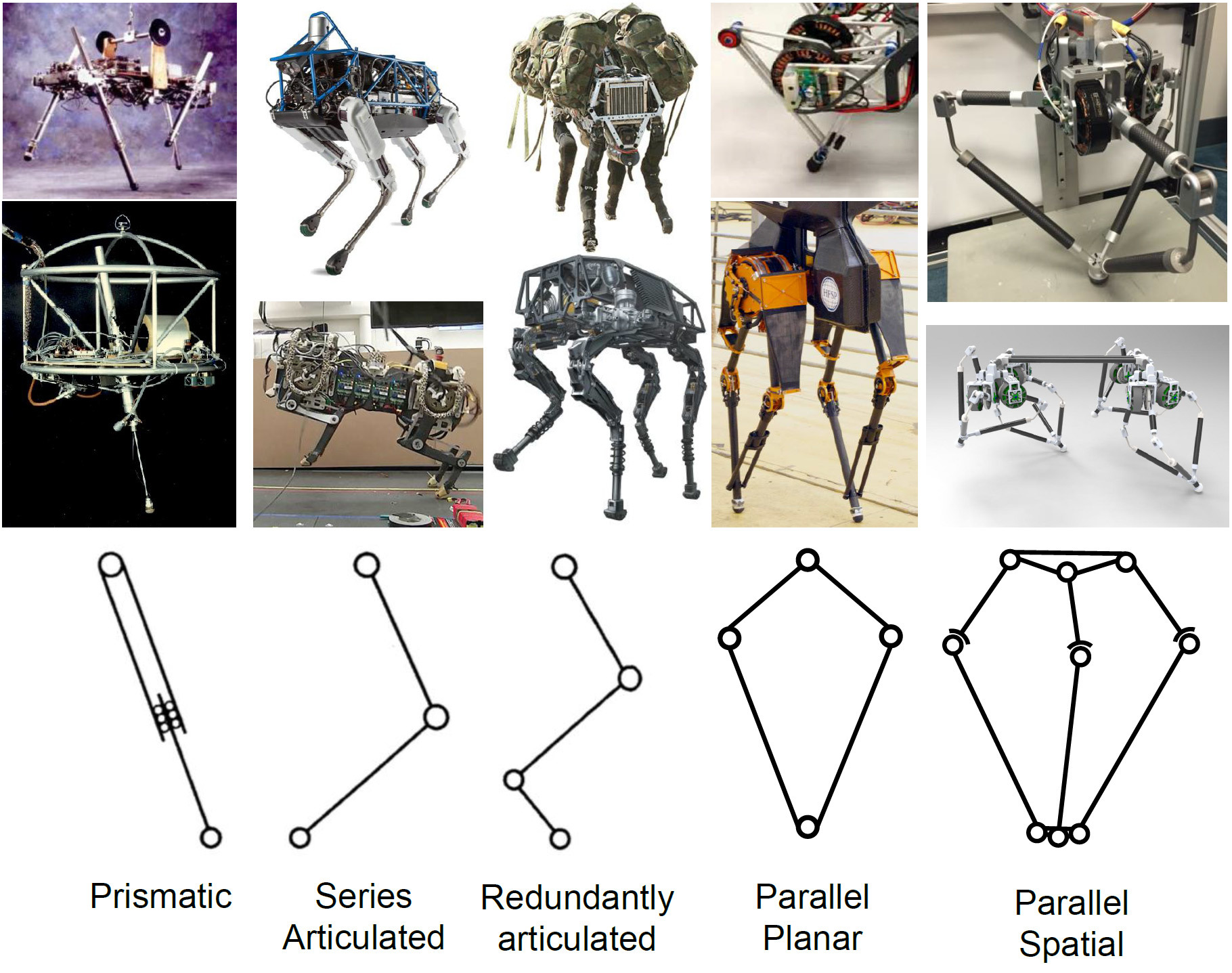
Типичные строения ноги у существующих роботов. Слева направо сверху вниз: Raibert, BDI Spot, MIT Cheetah, Boston Dynamics Big Dog, Penn/Ghost Robotics Minitaur, ATRIAS, GOAT. Иллюстрация: Саймон Калуче/Университет Карнеги-Меллона
Студент Университета Карнеги-Меллона Саймон Калуче (Simon Kalouche) предложил новый тип конструкции ноги для прыгающего робота: пространственно-параллельную конструкцию (parallel spatial на схеме). Студент также изготовил действующий прототип такой ноги, которую описал в свой дипломной работе (pdf).

CAD-рендеринг робота с четырьмя ногами GOAT. Изображение: Саймон Калуче/Университет Карнеги-Меллона
Конструкция ноги получила название GOAT, что означает "Gearless Omni-directional Acceleration-vectoring Topology". В дипломной работе Саймон Калуче объясняет, что в живой природе есть примеры млекопитающих, которые отличаются невероятной прыгучестью. В частности, это снежная коза Oreamnos americanus, способная передвигаться по пересечённой местности, перепрыгивать пропасти, скакать со скалы на скалу. Это животное дало автору вдохновение для создания роботизированной ноги, хотя конструкция ноги GOAT имеет мало общего с ногой реального животного. Но в идеале, роботы в будущем должны обладать такой же фантастической подвижностью, как снежная коза.

Снежная коза прыгает по скалам. Фото: W.Wayne Lockwood, M.D./Corbis, Britannica
Пространственно-параллельная конструкция ноги GOAT обеспечивает «проворную ходьбу, бег и, самое главное, взрывные прыжки в любом направлении и активное мягкое приземление», пишет автор. Он согласен, что по скорости бега робот с такими ногами не сможет конкурировать с известным роботом-гепардом Cheetah от инженеров Boston Dynamics и Массачусетского технологического института, но зато GOAT имеет преимущество перед Cheetah по по манёвренности. Он гораздо лучше подходит для передвижения прыжками, например, по завалам в зоне стихийного бедствия или техногенной катастрофы, на поле боя, в сложных природных условиях. Такой робот может перепрыгивать довольно высокие преграды, заборы, стены, взбираться по подъёмам даже с предельным для человека углом подъёма более 45°. Грубо говоря, он уступает Cheetah по скорости движения в 1D, но выигрывает во всех измерениях 3D.
Робот GOAT способен преодолевать другие препятствия, которые встречаются на пути: расщелины, пещеры, ямы, рвы, окопы. На видео показано, что конструкция робота предусматривает мягкую посадку и сохранение равновесия даже после самого высокого прыжка.
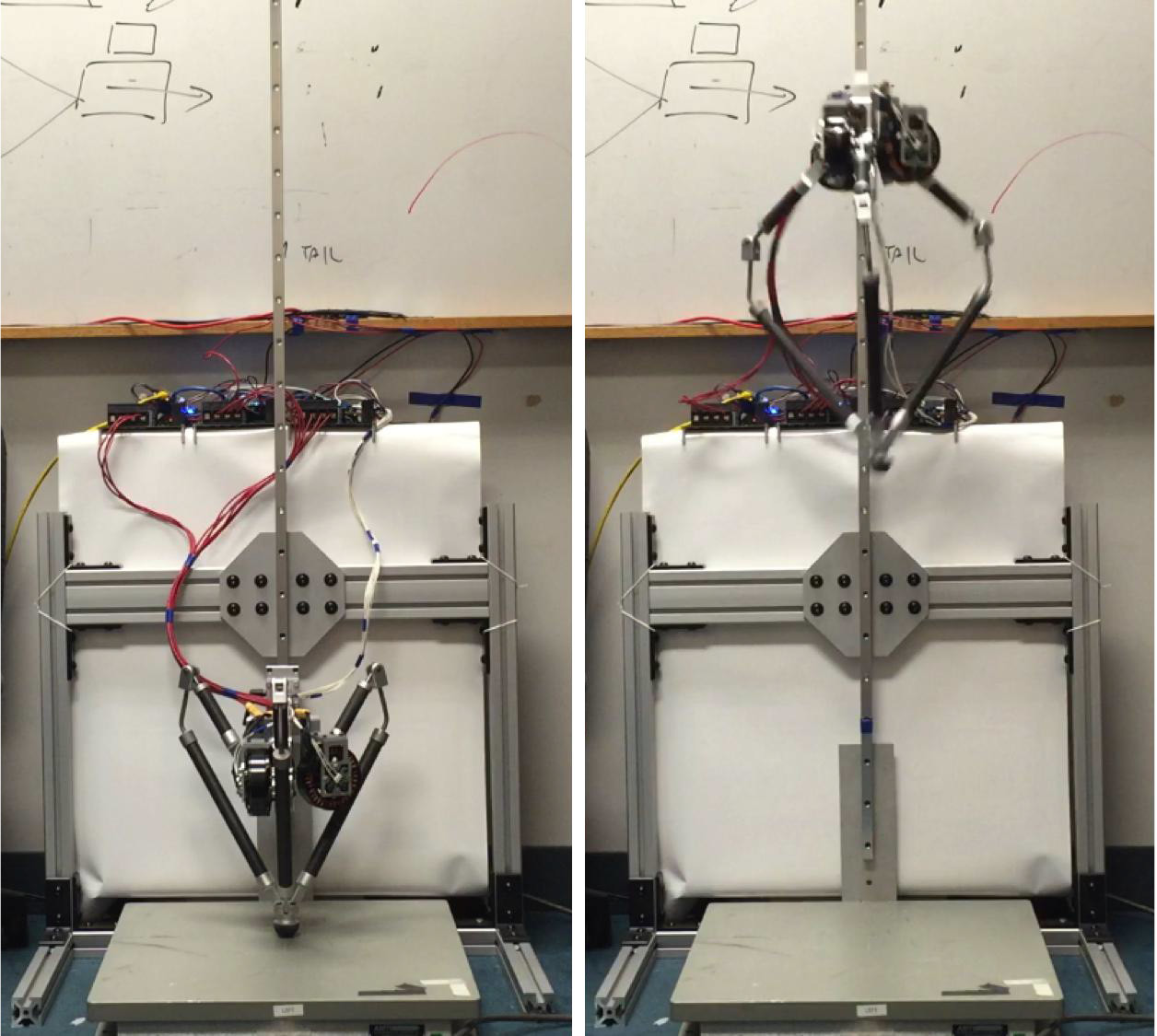
Испытания ноги GOAT с разными настройками
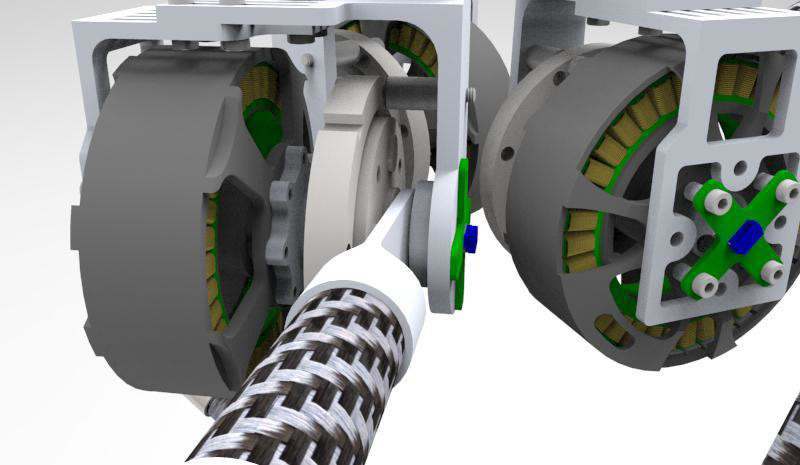
В конструкции GOAT используется привод T-Motor U10 с одноступенчатой планетарной передачей Matex 75-7MLD 7:1.
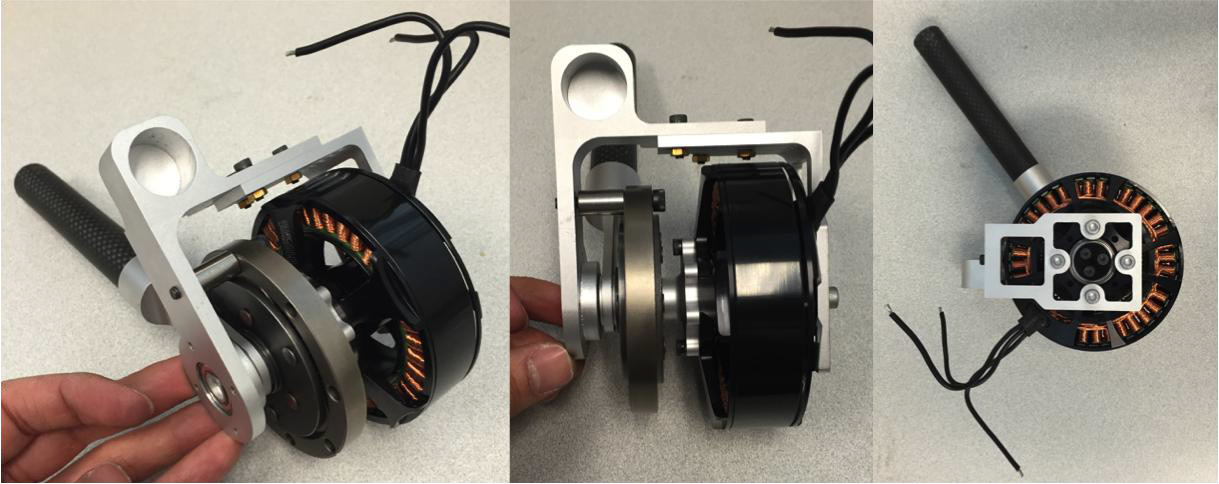
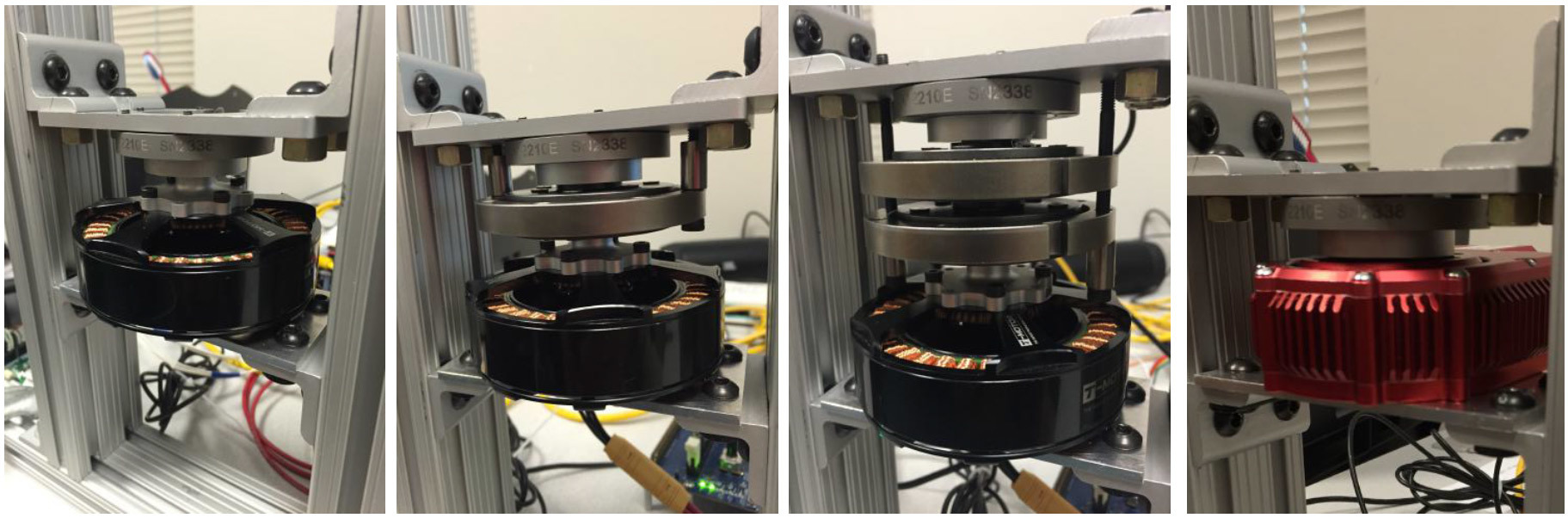
В дипломной работе автор сравнивает разные типы моторов. В таблице приведены результаты тестирования четырёх типов приводов: безредукторный электропривод T-Motor (DD, direct drive), электропривод T-Motor с одной планетарной передачей (QDD, quasi-direct-drive), электропривод T-Motor с двумя планетарными передачами (GM, gear motor), а также электропривод Hebi X-5 SEA.
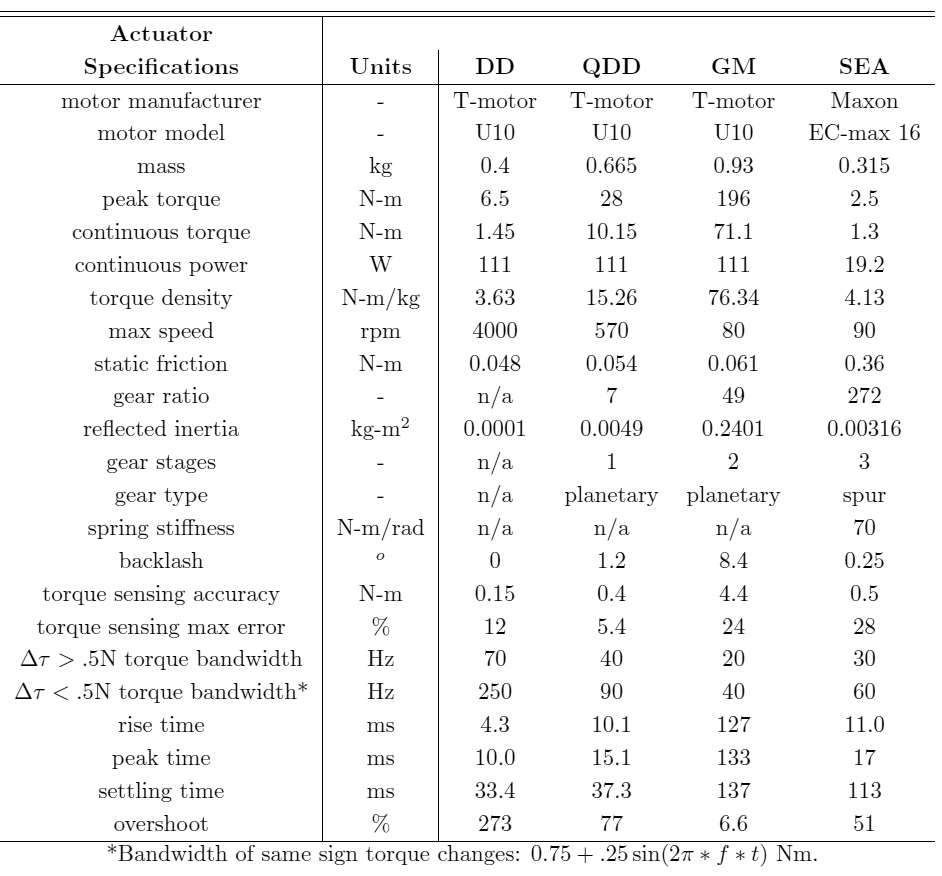
Все четыре типа приводов показаны на фотографиях, слева направо: DD, QDD, GM и SEA.
Автор говорит, что у каждого электропривода есть свои недостатки, поэтому пришлось идти на компромисс. Он объясняет, почему выбрал именно электропривод с одной планетарной передачей — он наиболее оптимально вписывается в конструкцию GOAT.
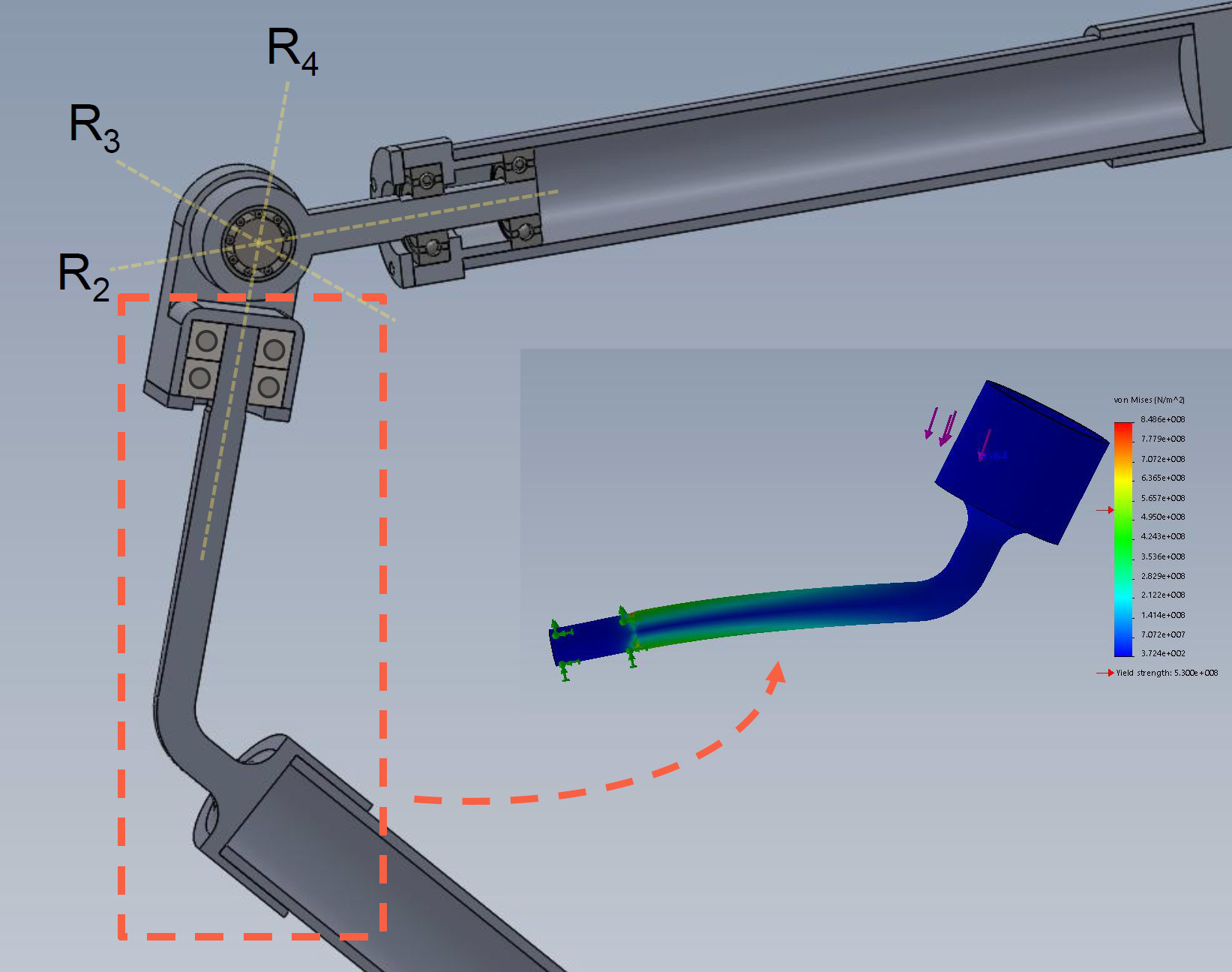
Конструкция сустава «ноги» GOAT состоит из трёх деталей с пересекающимися осями. Моделирование в Solidworks FEA показало, что на такой сустав оказывается давление до 123 psi в его нижней части. Поэтому данный компонент следует изготовлять из высокоуглеродистой стали с пределом текучести 125 psi, в то время как большинство остальных деталей можно изготовлять из алюминия 7075 с пределом текучести 73 psi.


Во время тестирования ноги GOAT была достигнута высота прыжка 82 см, что более чем в два раза превышает высоту самой конструкции.
Пока что Саймон Калуче изготовил только прототип одной ноги GOAT для дипломной работы. В будущем он планирует продолжить работу над роботом. Возможно, совместно с инженерами из других научно-исследовательких центров или частных компаний получится изготовить полноценного четырёхногого робота, который действительно будет проворно передвигаться по пересечённой местности. Или кто-нибудь изготовит такого робота раньше, чем автор, ведь его дипломная работа со всеми выкладками лежит в открытом доступе, разве что CAD-файлов не хватает. Но можно попробовать повторить эту работу.
Комментарии (11)

artmel
17.08.2016 21:46+7Вот это дипломная работа!
С грустью и отвращением вспоминаю дипломные в нашем универе.
IgorPastukhov
18.08.2016 09:06+2Полагаю, все зависело от вас.
artmel
18.08.2016 10:11+1Моя и зависела от меня.
Был идеалистом, чтото пытался.
а вот большинство были типа «создание интернет сайта» на html и прокатывало.
Есть у нас БелГУ так я одному студенту в 2006г делал диплом «онлайн управление автостоянками» примитив по сути. типа онлайн продажи билетов в кинотеатре. но для них это было «супер пупер крутяк».
Проблема усугубляется еще тем, что на оформление дипломной уходило зачастую больше времени чем на сам диплом. и тем кто принимает дипломы в общем то плевать на тему. главное чтобы шрифт был правильный и количество плакатов не меньше нормы.
можно хоть антигравитационный привод работающий описать. но если не если вместо шрифта ГОСТ-А напечатать Arial, диплом никогда не пройдет.
к чему это все?
формализм и полнейшее безразличие в купе с желанием продать своему дипломнику готовый диплом, убивают наше образование.IgorPastukhov
18.08.2016 12:04Ну, во первых, для 2006 года нормальный диплом, во вторых, толковому руководителю не все равно, некоторые дипломы потом в работу пойдут:-)
Но формализм, согласен… Но без этого тоже никуда в больших проектах.artmel
18.08.2016 12:46да, в том то и дело что он был для тех лет нормальным.
а воспринимался без малого как чудо света.
на остальные без слез и мата смотреть нельзя было, а мне приносили их как образец.
Jeffry_Choser
18.08.2016 12:27Согласен с вами, но дело еще не только в этом. Если загуглить сколько стоит один привод T-Motor U10, а он стоит 330$, что по нынешнему курсу примерно 20.000р, становится немножко грустно… т.к. в наших дип/р мы не могли себе такого позволить.
А он использует в работе 3 привода + планетарные передачи, которые тоже стоят не мало.
Вообщем были бы у нас такие возможности, то у смышленых ребят можно было бы дипломные работы сразу на производство направлять.artmel
18.08.2016 12:41так можно сделать на дешевых китайских. да уродство, но позволит проверить теорию.
но в общем согласен. образование сейчас это просто выкачка денег с выдачей бумажек а не образование.
rfvnhy
19.08.2016 17:43А вот если «украсть идею» у кузнечика/саранчи не получится ли более сильный прыжок?
Хотя «сдирать» у насекомых надо осторожно — не все идеи из микромира нормально масштабируются, где-то читал что если муравья увеличить, то он перестанет поднимать вес во много раз больше собственного…
GennPen
Прыжки это конечно хорошо. А что с эффективностью и грузоподъемностью?
Мало того, на КДПВ все роботы автономные, а тут он привязан кабелями, странное сравнение.
Vicrius
Это же не робот а просто нога. По этому и кабель и все такое.
GennPen
Ну, про эффективность и грузоподъемность и спрашивал. Может в этом случае линейный двигатель гораздо эффективней и компактней был бы?