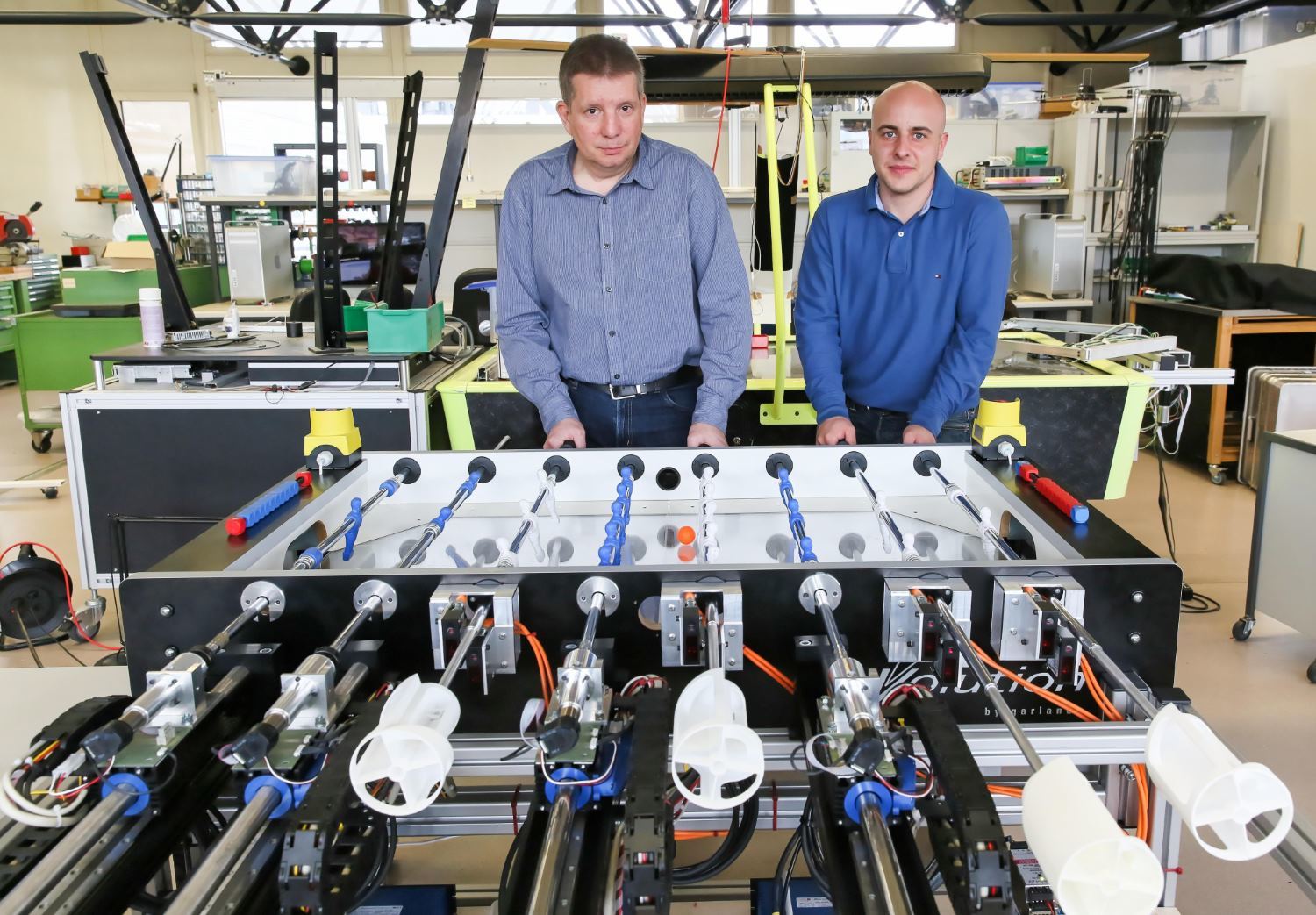
Специалисты из Федеральной политехнической школы Лозанны сделали робота, который может играть с человеком в настольный футбол. В большей части футбольных баталий в миниатюре робот побеждает человека. Это не сделанная на коленке система, а проект, над которым его авторы работали несколько лет. Завершить его удалось благодаря появлению новых типов электромоторов и высокоскоростных камер.
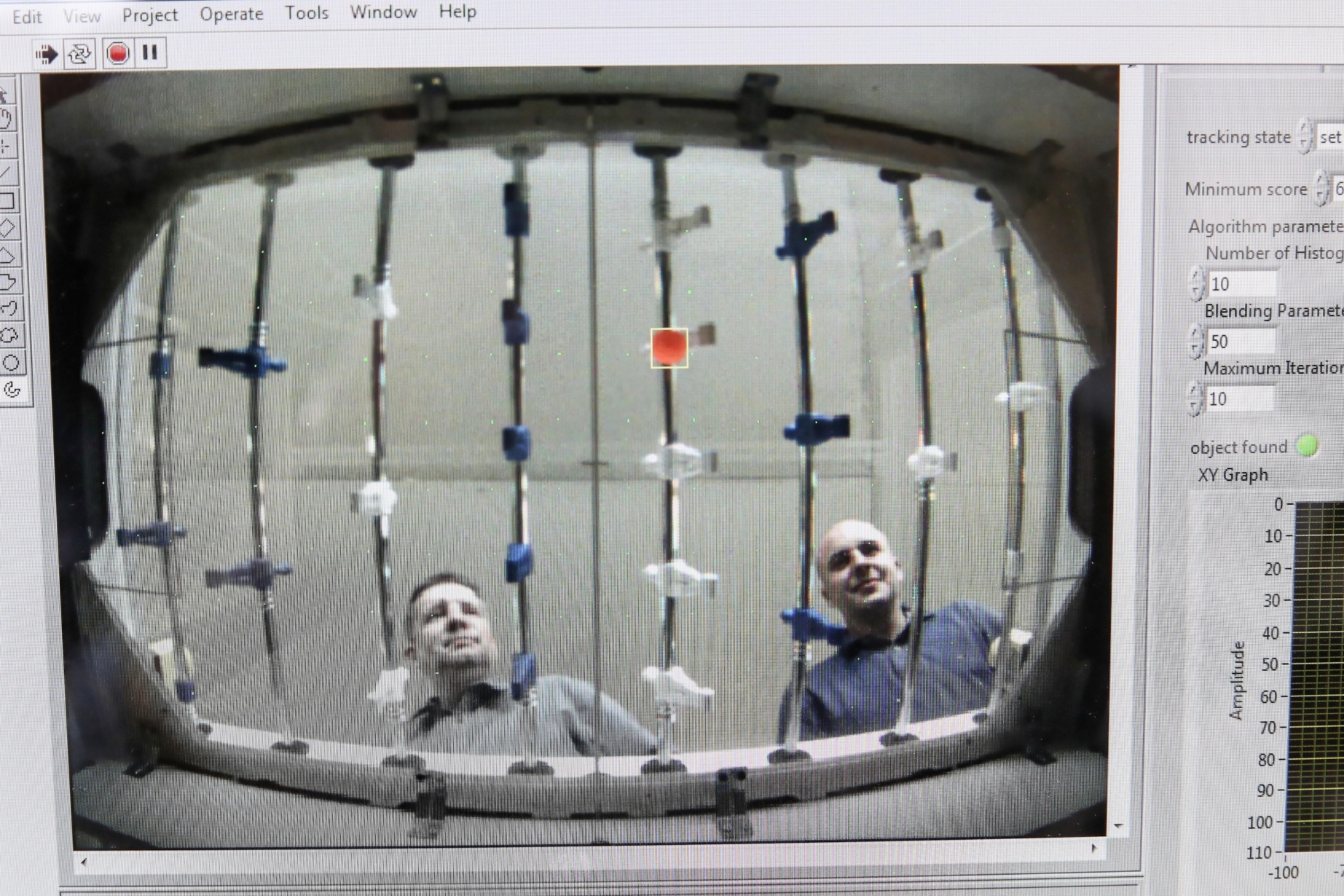
Камера располагается под футбольным полем, которое полостью прозрачно. Она фотографирует поле снизу с частотой 300 снимков в секунду, фиксируя малейшие изменения положения мячика. Собранная информация затем поступает в компьютерный блок, где все данные обрабатываются в режиме реального времени. После анализа каждой из ситуаций компьютер отдает команды футбольным «игрокам», и те начинают действовать. Точность позиционирования футболистов сервоприводами — менее миллиметра.
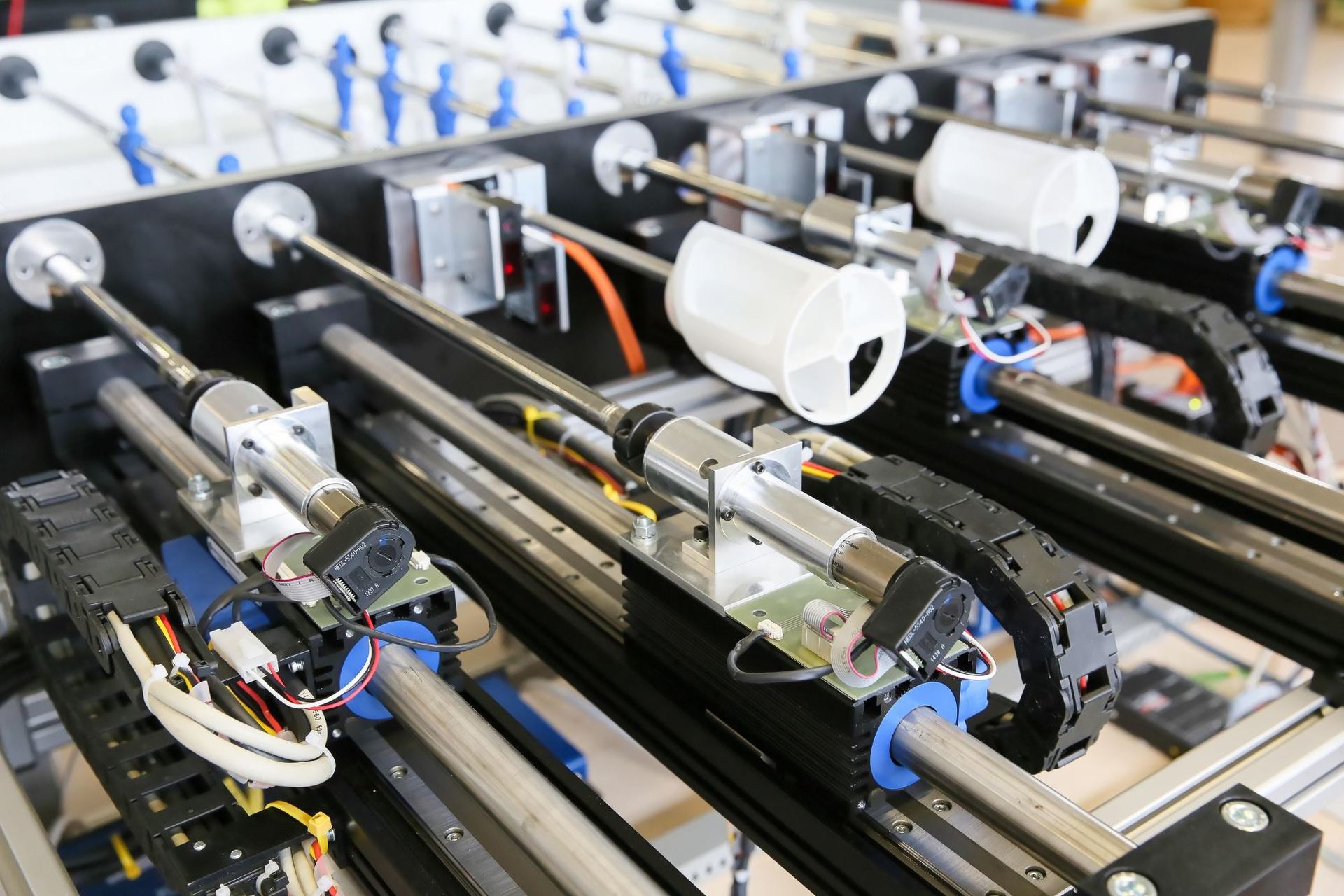
Каждая фигурка может бить по мячу с ускорением вплоть до 9g. Для управления фигурками используются линейные двигатели с высокими динамическими характеристиками. Они могут установить пластикового игрока на поле в нужной позиции, после чего уже электромотор уже другого типа обеспечивает совершение удар по мячу. Двигается робот быстрее, чем человек.
Сейчас система может быстро определить местоположение мяча, остановить его и послать точно в цель. «Это довольно базовая стратегия, но она работает удивительно хорошо», — говорит Кристоф Салзманн (Christophe Salzmann), ученый, который руководит ходом реализации проекта.
Изображение: Alain Herzog/EPFL
Пока что изобретатели не слишком удовлетворены тем, что получилось. Они говорят о проекте следующее: «На этом уровне наша система похожа на бодибилдера с крошечным мозгом». «Мы хотим сделать нашу систему не просто сильной и быстрой, но еще и умной, чтобы робот мог обманывать оппонента, предсказывать часть ситуаций на поле, понимать, куда может попасть мяч в следующий момент и какое значение имеет каждое действие соперника».
В ближайшем будущем разработчики добавят к своей системе еще и лазеры, которые смогут более точно управлять фигурками и мячом на поле. Кроме того, дорабатываться будет и программное обеспечение. Разработчики планируют создать систему, которая сможет управлять одновременно двумя командами на поле, так, чтобы обе команды работали под полным контролем робота.
Комментарии (16)

Goodkat
21.08.2016 19:28+8В Швейцарии сделали робота, обыгрывающего человека в настольный футбол
Если бы у робота было два манипулятора, которыми он крутил ручки, то можно было бы сказать, что робот обыгрывает человека в футбол. А так у робота заведомо выигрышные условия, так что сравнивать с человеком не корректно.
Pritorius
22.08.2016 03:18+4Ещё более некорректно было ставить камеру снизу, и избавлять робота от слепых зон, в то время как человек смотрит сверху.

webkumo
22.08.2016 13:23+1+ ухудшение восприятия для игроков — обычно используется матовое стекло и «нижнюю границу» стола видно чётко, заодно легче воспринимается состояние мяча (в воздухе/на полу)…
+ непонятно какой мяч (судя по фоткам — ни разу не Garlando High Touch, скорее какой-то «скользкий»… т.е. мяч ориентирован на игру «отбей в ворота», а не на «управляй и забивай»)
Bytamine
22.08.2016 14:20Garlando High Control только.
Пока что эта машина в тепличных условиях обыграла непонятно кого.
Понятно, что вопрос победы над чемпионом мира — это только вопрос времени. Но сейчас это просто умная машина для кручения ручек, а не игры в настольный футбол.
ne0dim
21.08.2016 20:01Странно, что софт сделан на LabVIEW. Неужели с OpenCV не разобрались ребята?
bookworm
21.08.2016 20:18+2Ну если они могут себе позволить лицензии (очевидно академические) на NI LabVIEW и NI Vision, то почему нет? Для прототипирования, думаю, удобнее. Они сосредотачиваются на алгоритмах AI по управлению игрой, абстрагируясь от специфики языков при вводе/выводе изображения, ШИМ-управлении приводами и т.п. И делают это с помощью визуальных средств. Та что для учебных целей — самое то. Если писали на LabVIEW, то знаете сами.
ne0dim
21.08.2016 23:09Писал на LabVIEW, знаю что это такое. Как уже отметили выше, это студенческая работа, оттуда и выбор средств реализации. На мой сугубо личный взгляд даже для прототипирования, если в команде есть программист, данная среда подходит плохо.


Roboserv
22.08.2016 21:23+1Такой робот стоит в моем прошлом универе уже почти 10 лет, я на нем свой бакалавр защищал и его улучшал. Ничего нового в этом нету. Плюс нашего робота собирали и делали только студенты. Мои видео на эту тему, если кому интересно:
Описание и обзор робота — https://youtu.be/fYv3MSlDmgw
Две игры против него — https://youtu.be/c0MBlZD-4gs
A-Stahl
Рядовые швейцарской армии очевидности продемонстрировали, что машина может быстрее и точнее человека двигать стержни. Браво! Что бы мы без них делали-то?
Anarions
Вы звучите как «одарённые» личности спрашивающие «зачем мы летаем в космос» и «зачем мы тратим деньги на БАК». Это исследовательская работа в которой они изучают\улучшают подобные технологии. Проблему могли выбрать любую — почему не настольный футбол? Наработки можно будет применить в любой другой системе.
wmtoolsnet
Вы серьезно? Ну и расскажите, что они исследовали, что изучили, и что улучшили?
Ну вот изучили они камеру, которая снимает с частотой 300 кадров в секунду, и к какому выводу пришли, кроме самых капитантских?
Взяли чужую камеру, чужие линейные двигатели, чужой софт (даже не осилив OpenCV), чужие электромоторы, скрепили это проводками без пайки, и выдали за исследовательскую работу, попутно накормив вкусным роадмапом о котором они забудут, как и им подобные.
***
Просто посмотрите это видео: https://youtu.be/C70R7oo4jMc, сравните возможности-результаты девочки с возможностями-результатами тех кого вы защищаете, и тогда поймете, какую низкопробную ху*ню сделали ваши «специалисты».
Anarions
Может вы ссылкой ошиблись, но по ней игрушечное ружьё управляемое джойстиком и камера распознающая картинки на футболках. Если бы система сама стреляла по быстро движущимся целям — тут можно было бы сравнивать.
AndreyDmitriev
На самом деле тут больше претензии к редактору Гиктаймс, который зачем-то обозвал студентов специалистами. Это на самом деле хорошая учебная студенческая работа, курирует её Кристоф Зальцманн (Christophe Salzmann), у него PhD, он сертифицированный инструктор National Instruments и соавтор нескольких книг по LabVIEW. Принципиальной научной новизны в ней нет, но для изучения основ машинного зрения реального времени, и взаимодействия с исполнительными механизмами — самое оно. Плюс сделано достаточно «промышленно». С пакетом NI Vision на подобных задачах работать гораздо удобнее, чем с OpenCV (это я могу заявить как человек, достаточно уверенно владеющий и тем и другим). Ну а студенты, выполняющие такие работы, потом и на производстве будут делать что-то похожее.
Да вот хотя бы — машина, сортирующая и отбраковывающая карандашики:
Там тоже LabVIEW, фреймграбберы NI, линейная скоростная камера с триггером.
MnogoBukv
«Да вот хотя бы — машина, сортирующая и отбраковывающая карандашики»
На правах шутки:
Не надо было их смешивать после производства, и не надо изобретать машинку для сортировки.
А стол для кикера экспроприировал бы домой такой, рубиться вечерами с роботом.