
Эти три робота — предшественники Astrobee. Они проходили некоторые испытания на МКС, но вот человеку никак не помогали
Агентство НАСА использует роботов на Международной космической станции с 2006 года. За более, чем 10 лет на МКС были испытаны различные системы. Один из самых необычных проектов получил название SPHERES (Synchronized Position Hold, Engage, Re-orient, Experimental Satellites). В рамках этого проекта НАСА проводила испытания трио роботов, которые провели на станции более 600 часов. За это время инженеры и ученые смогли провести большое количество экспериментов, включая взаимодействие роботов в режиме автономной работы, картирование и навигацию. В то же время, эти роботы не были предназначены для выполнения каких-либо практических работ, которые могли бы помочь астронавтам.
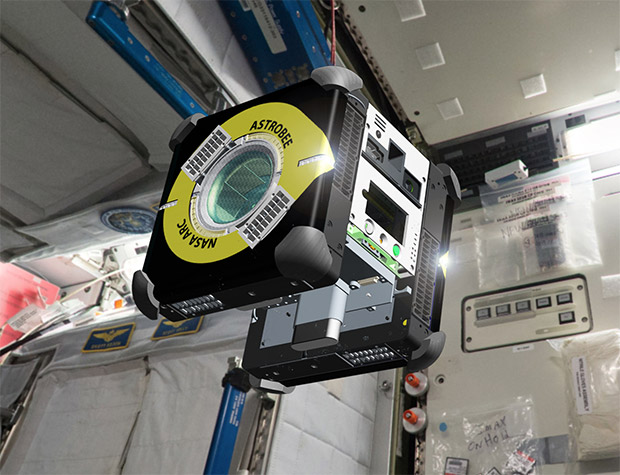
Сейчас наступило время роботов нового поколения, которые смогут оказывать уже непосредственную помощь людям на борту МКС. Именно таким роботом является Astrobee. Он может снять с астронавтов часть рутинных задач, включая анализ качества воздуха, определение уровня шума и ретрансляцию звуков со станции посредством микрофона и камеры. Кроме того, робот оснащен RFID сканером, он может использовать некоторые инструменты, работая с ними при помощи небольшого манипулятора.
Осенью НАСА показало возможности своего робота в одном из исследовательских центров НАСА. Выглядит он не слишком впечатляюще для своих возможностей. Фактически, робот представляет собой куб с длиной грани 32 сантиметра. Корпус создан из упругого материала. Внутри — миниатюрная реактивная система, которая позволяет роботу двигаться. Кроме того, в корпусе размещено большое количество сенсоров, контрольные системы, тачскрин и несколько дополнительных свободных разъемов для добавления различного аппаратного обеспечения, включая уже упомянутую выше руку-манипулятор.
Для того, чтобы проверить возможности реактивной системы робота, Astrobee разместили на док-станции, напоминающей сани. Эти «сани», в свою очередь, располагаются на одной из граней очень гладкого гранитного куба. При помощи реактивной струи сжатого углекислого газа система без труда скользит по поверхности. Благодаря этому разработчики могут тестировать навигационную и реактивную системы, донастраивая различные элементы в случае необходимости. В космосе робот будет парить в невесомости без всяких саней, передвигаясь за счет реактивного движения.
Разработчики НАСА утверждают, что Astrobee — вовсе не следующее поколение роботов SPHERE. На самом деле, это полностью новая платформа, собранная с нуля и предназначенная для автономной работы на МКС. Одно из наиболее заметных добавлений — как раз система реактивного движения. Она «заводится» от электрического тока, а зарядиться робот может в своей док-станции. Роботы SPHERE, например, тоже умели перемещаться при помощи реактивного движения, но они зависели от заряда своих батарей. Как уже говорилось выше, при добавлении дополнительных элементов к конструкции робота тот становится более функциональным. Модули можно заменять на другие, замещая одну функцию другой в случае необходимости.
Отличием нового робота от предшественников можно назвать то, что SPHERES полностью зависели в движении от доступного «заряда» углекислого газа. Считалось, что они могут работать не только внутри станции, но и снаружи. Astrobee в этом смысле сильно отличается от своих «коллег». Он может двигаться в условиях невесомости лишь в том случае, если находится в атмосфере. Заряда углекислого газа у робота нет, поэтому его реактивная система использует воздух станции. То есть снаружи МКС он двигаться не сможет.
Компьютерная система управления робота захватывает и выбрасывает воздух в направлении, противоположном намеченному маршруту. Astrobee может передвигаться в любом направлении.

На фотографии показан один из модулей реактивного движения Astrobee
За защитной стенкой одной из граней куба находится вентилятор, который засасывает воздух. Есть и другие аналогичные элементы. Их движение спроектировано таким образом, чтобы минимизировать гироскопические силы. Эта система постоянно работает, создавая карман сжатого воздуха внутри робота. Воздух в случае необходимости движения системы выбрасывается из специальных форсунок. Они располагаются на всех гранях корпуса Astrobee. Если форсунки закрыты, робот не двигается. Открытие форсунки означает выброс сжатого воздуха и движение в противоположном направлении.
Всего разработчики предусмотрели 12 форсунок, которые размещены в особом порядке. Если использовать всего одну форсунку в единицу времени, то куб в невесомости будет двигаться хаотично. Управлять им будет очень сложно. Но если работать сразу с парой форсунок, то куб будет двигаться сбалансировано.
Понятно, что наличие системы, которая движется при помощи реактивной струи воздуха в замкнутом пространстве воздуха требует разработки специальных мер безопасности. В случае необходимости любой из астронавтов может взять куб в руки и перенести его в безопасное место. Кроме того, корпус робота покрыт мягким материалом, который минимизирует возможный ущерб от удара робота о какой-либо хрупкий элемент (дисплей ноутбука и т.п.).
Что касается иллюминаторов станции, то за них опасаться не приходиться. Они состоят из четырех слоев стекла. Два слоя — это прочные стекла, которые закрыты еще двумя слоями другого типа стекла. Сейчас НАСА необходимо доказать, что ни при каких обстоятельствах робот не сможет пробить один из слоев.
Кроме того, разработчики при создании Astrobee предусмотрели его полную безопасности. Другими словами, если программное обеспечение системы «сходит с ума», вся система в целом не должна нанести критический ущерб станции. Например, какой-либо баг в программном обеспечении может привести к тому, что робот максимально ускорится и пройдет в таком режиме около 20 метров (максимальное расстояние по прямой линии на МКС). В этом случае нужно быть уверенным в том, что при ударе о какой-либо элемент станции (тот же иллюминатор) ему не будет нанесен критических ущерб.
Между отдельными элементами системы реактивного движения робота есть большое количество сенсоров и прочего оборудования, которое необходимо роботу для автономной работы. В частности, он может заниматься перемещением грузов. Несколько граней робота предназначены для работы с грузами. Благодаря наличию системы захвата предмета робот может транспортировать его из одного конца станции в другой.
Компьютерная система робота состоит из трех уровней: низкий, средний и высокий. Средний и высокий уровни почти идентичны, за исключением того, что средний уровень работает на основе Linux и отвечает за большую часть функций робота. А вот верхний уровень работает на основе Android и отвечает за работу с грузами и передачу их из точки в точку. Этот уровень, по словам разработчиков, не слишком сложен, так что для него можно писать приложения под Android, расширяя функциональности системы.
Что касается сенсоров, то у Astrobee есть главная навигационная камера с полем зрения в 116°. Кроме того, разработчики предусмотрели наличие HD-камеры с автофокусом, которая способна передавать информацию с МКС на Землю в режиме реального времени. Камера CamBoard Pico Flexx позволяет устройству определять препятствия с расстояния в 4 метра. И еще один оптический детектор определяет скорость аппарата. Если скорость слишком высокая, ряд двигателей отключаются для ее снижения.
Одно из достоинств Astrobee это то, что робот способен перемещаться в автономном режиме по МКС (везде, кроме сегмента России). Это значительное достижение инженеров и ученых, поскольку внутри МКС — сегментированное пространство, и ориентироваться там для робота не так и просто. Впрочем, оно организовано очень рационально, так что роботу не нужно слишком «напрягаться» для навигации по различным отсекам. В памяти робота есть главная карта, так что по одному кадру окружения робот может понять, где находится.
Но вот взаимодействие с людьми во время движения — более сложная задача. Люди движутся более-менее непредсказуемо, и робот не должен с ними сталкиваться в процессе перемещения. В процессе работы над Astrobee была решена и эта задача. К слову, автономный режим работы робота можно отключить и управлять им удаленно.
Для зарядки батарей устройства и снятия данных телеметрии для робота спроектировали док-станцию.
Как уже говорилось выше, для выполнения ряда операций для робота создали манипулятор, его отпечатали на 3D принтере. Большую часть времени манипулятор находится в сложенном состоянии, но при необходимости он может разложиться. Используя камеру, робот распознает доступные ему объекты, которые он может перемещать. Также при помощи манипулятора Astrobee способен двигаться по пространству станции. В этом случае можно экономить заряд аккумулятора. Если использовать исключительно манипулятор, а реактивную систему отключить, то расход энергии снижается на 80%.
«Клешня» на конце манипулятора достаточно надежная — если робот закрепился с ее помощью, но сорваться он не сможет. Но все же астронавт в случае необходимости может снять робота, сила сжатия специально предусмотрена на таком уровне, чтобы человек мог без проблем взять даже закрепленного робота, если что-то пойдет не так.
Так зачем он нужен?
Основная задача робота — помощь астронавтам в выполнении ряда рутинных задач. Вне зависимости от того, будет ли робот функционировать в автономном режиме или им станут управлять удаленно, он должен быть в состоянии подменить человека. Например, установить камкордер, наблюдать за поведением различных элементов внутри станции, вести мониторинг работы станции, контролировать качества воздуха. В частности, крайне важным является определение уровня концентрации углекислого газа. Проводить этот анализ приходится часто, но астронавтам очень не нравится эта однообразная процедура. А вот робот может заменить человека в этом, и проводить анализ воздуха так часто, как потребуется.
Рендер внешнего вида финального прототипа робота
В этом году работать на МКС робот не будет. НАСА утверждает, что запустит его станции в 2018 отчетном году. Будет отправлено сразу три таких робота. Два будут выполнять основные задачи, а третий служит в качестве дополнения. Если какой-то из отправленных роботов поломается, то его можно будет заменить.
Перед тем, как эти роботы прибудут на МКС, их предшественников, SPHERES, уже уберут. В прошлом аппараты неплохо себя показали, а собранные ими данные очень помогли ученым в разработке робота нового поколения. Один робот может значительно разгрузить членов команды МКС, а три таких робота и вовсе снимут часть малозначительных, но продолжительных во времени обязанностей астронавтов.
Комментарии (16)

AFakeman
12.02.2017 15:52+1Интересно, почему по нашему сегменту перемещаться не может.

QDeathNick
13.02.2017 14:50+1Чтобы не сломалась или не протерялась.
Там видимо как в Portal барьер, сквозь который кубики выносить нельзя.
Rumlin
12.02.2017 20:47+2SPHERES был другим проектом, более интересным. Они отрабатывали алгоритмы сборки роботами орбитальных станций, межпланетных кораблей.
http://e2e.ti.com/blogs_/b/designproject/archive/2016/01/21/how-ti-technology-amp-mit-are-helping-us-get-to-mars


Jetmanman
13.02.2017 06:59Может мне кажется конечно, но по моему у космонавтов только рутинные задачи.

speakingfish
15.02.2017 09:18Судя по расположению форсунок только на противоположных гранях и в противоположных направлениях, робот может перемещаться только вдоль одной оси. Это, конечно, делает движения робота более предсказуемыми, но сильно ограничивает манёвры. Т.е. робот перемещается от точки к точке, останавливается в ней и начинает вращаться чтобы переориентироваться в другом направлении. Во время полёта из точки к точке робот вращаться не может — иначе он не сможет затормозиться. Основное назначение такого большого числа форсунок — всего лишь коррекция траектории движения для парирования несбалансированных масс.

Mad__Max
17.02.2017 18:12Почему не сможет? Форсунок 12 — по 2 на каждую грань. И расположены они все не по центру граней, а ближе к краям по диагонали. В результате он может летать как прямолинейно вдоль одной из осей — если использовать 2 форсунки на одной грани одновременно дающие в результате симметричную тягу перепендикуляно этой грани.
Так и подруливать на лету — если тягу одной из форсунок уменьшить, или давать короткие импульсы через 3ю форсунку расположенную на одной из боковых граней, расположенную перпендикулярно вектору тяги 2х «маршевых» форсунок.
Все зависит только алгоритмов (ПО). Насколько сложные заложат так летать и будет.speakingfish
17.02.2017 19:07Не увидел там форсунок, перпендикулярным другим форсункам — все форсунки расположены параллельно одной оси. Из этого так же следует что по этой же оси он и вращаться не может.
Mad__Max
18.02.2017 03:00+2А мы точно на одни и те же картинки смотрим?
Новый робот только на 2й и 3й фото. И в видео по ссылке. На 1й где цветные шарики(точнее это что-то многогранное типа тетрагексаэдра) это старые эксперименты, как они летали точно не знаю.
В новом форсунками(форсунки впрочем это только перевод — в оригинале nozzles = сопла) названы большие дырки закрытые решеткой на каждой из 6 граней куба. Они все создают тягу перепендикулярно грани на которой расположены. Но т.к. граней 6 взаимно перпендикулярных (общая форма — куб же) и на каждой по 2 сопла, то получаем регулируемую тягу по всем 3м осям в обоих направлениях.
Имея такое железо дело только за софтом — можно запрограммировать любое произвольно сложное движение в 3х измерениях.speakingfish
20.02.2017 12:10Спасибо, теперь стало понятно где сопла. Непонятно только зачем было делать разные размеры сопел на разных гранях и располагать сопла на основных гранях под углом.
Mad__Max
21.02.2017 01:39Тут уже точно не знаю, только догадки:
На передней (и задней) гранях сопла почти в 2 раза больше чем на остальных 4х вероятно из-за для того, что их предполагается использовать как маршевые двигатели для прямолинейных полетов или буксировки чего-либо когда робот берет что-то захватом, когда робот летит «мордой» вереред или «задним ходом». А остальные преимущественно для подруливания и вращения на месте.
В принципе и на других ничего не мешает использовать и включив боковые лететь боком, но какие будут использоваться чаще в качестве основной тяги те и сделали больше. А на остальных будут меньше максимально возможные ускорения и достижимая скорость.
Под углом — вероятно чтобы включая только по одному соплу на грани, можно было заставить робота вращаться вокруг любой из своих осей при этом оставаясь примерно на одном месте.
Nubus
Вот автоматизация рутинных задач и добралась в космос.
Osel_Ia
Не прошло и 70 лет… летают 3 кубика-пылесоса и замеряют параметры воздуха, могут даже что-то схватить и притащить. При цене человеко-часа на этом рабочем месте в сотни тысяч долларов. Ёбаный стыд…