Мы занимаемся созданием бесколлекторных моторов и недавно у нас был заказ на мотор для квадрокоптера с тягой не менее 2 Кг на каждый винт. До этого мы не делали моторы под воздушный винт и нам был необходим метод измерения и стенд для мотора с винтом.
Прежде чем начать выбирать оптимальный мотор и винт под него, сперва нужно разобраться какие потери возникают в моторах.
Основными источниками потерь в бесколлекторных моторах являются железо статора и его обмотка.
Потери на железе возникают из-за его перемагничивания. Данные потери условно можно считать пропорциональными оборотам мотора и они задают минимальную потребляемую энергию мотора. Так, например, если вы возьмете большой и мощный мотор для маленького коптера с маленьким винтом, то ничего хорошего у вас не получится. Мотор просто будет вращаться вхолостую с нулевым КПД и греть железо в статоре.
Потери в медной проволоке наоборот не зависят от оборотов, а зависят от тока/потребляемой мощности. Данные потери ограничивают максимальную мощность, которую способен выдать мотор не перегревшись.
Вторым важным элементом при выборе мотора является винт. Малые винты обладают более низкими показателями эффективности г/Вт(1 грамм подъёмной силы/1 Ватт потребляемой мощности), но маленькие винты более динамичны и позволяют быстро набрать скорость на гоночных коптерах. Для достижения максимального времени полёта винт должен соответствовать максимально эффективному режиму работы мотора.
Однако если мы захотим подобрать оптимальные комплектующие для своего коптера, то мы столкнемся с большой проблемой при их выборе. Производители дают минимальный набор характеристик для своего товара. По винтам вообще невозможно найти какой либо информации кроме их размера.
Функционал стенда
На данный момент несколько производителей уже представили на рынок свои стенды. Однако их возможности не сильно превосходит функционал кухонных весов. И данные стенды не способны дать всех характеристик при работе мотора.
Нам же от стенда были необходимы следующие параметры: потребляемая мощность, обороты мотора, тяга винта, момент создаваемый винтом, КПД мотора, эффективность мотора, винта.
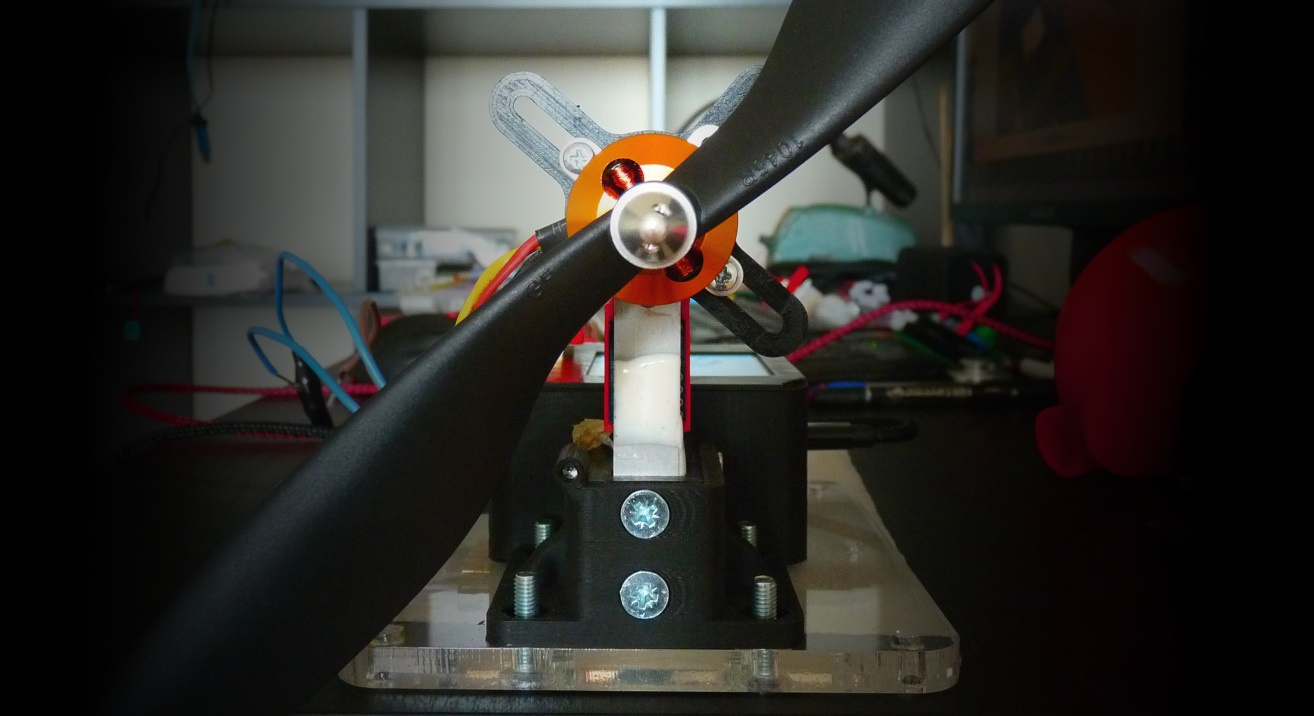
Исходя из этих параметров мы спроектировали конструкцию стенда и снабдили его всеми необходимыми датчиками.

Для измерения силы тяги и момента были выбраны хорошо распространённые сейчас датчики с тензосопротивлением. Они обладают хорошей жесткостью и высокой точностью измерения и очень удачно подходят по своей конструкции.
Для измерения остальных параметров были выбраны стандартные для этого датчики: полупроводниковое термосопротивление для температуры, акселерометр для замера вибраций, датчик тока на эффекте холла для измерения тока и делитель для напряжения…
Сердцем нашего стенда является микроконтроллер ATMega328 на плате Arduino Nano. Он собирает показания с датчиков, обрабатывает их и выводит на экран. Данный микроконтроллер оптимально подходит для данной задачи. Он обладает минимальной ценой, не привередлив к питанию, стабилен и имеет достаточное количество интерфейсов для данной задачи.
В результате нашей работы был получен стенд со следующими параметрами:
- Питание через BEC модулю контроллера 5-9В, либо через micro USB
- Измерение тяги до 5Кг с точностью +-5г
- Измерение момента до 3Кг/см с точностью +-5г/см
- Измерение напряжения до 30В с точность +-0.2В
- Измерение тока до 30А с точностью +-0.1А
- Измерение КПД с точностью +-2.5%
- Возможность измерения оборотов винта в диапазоне 1000-15000RPM
- Возможность измерения относительных вибраций.(Можно использовать этот параметр для балансировки мотора с винтом путём уменьшения параметра вибраций)
- Измерение температуры мотора (*на данный момент не полностью реализовано в стенде, нами использовался отдельно подключенный датчик)
- Возможность управления педалью “газа” прямо с пульта
Тестирование
Мы испытали наш стенд на распространенном китайском моторе 2212 и на нашем моторе.

Китайский мотор во всём диапазоне не смог выдать КПД выше 50%, а его эффективность составила около 4-5г/Ватт. Наш же смог показать КПД выше 70%, при этом он работал на минимуме своей мощности(тест был в пике до 500Вт, теоретический максимум 1500Вт), т.к. размер тестируемого винта маловат для него и с большем винтом КПД только возрастёт. Эффективность же у нас получилась 9г/Ватт. Так что даже с учетом гораздо большего веса мотора, даже небольшой коптер с нашим мотором смог бы летать дольше.)
Экономный вариант
Стенд описанный в данной статье является достаточно сложным и предназначен для точной проработки силовых агрегатов дрона. Для случая, когда охото сэкономить и узнать просто тягу мотора, нами был сделан простой, дешевый адаптер способный выполнить данную функцию.

Данный адаптер крепится одним концом к мотору, вторым к бутылке с водой. Бутылка устанавливается на весы. Далее мотор запускается и тяга измеряется по показаниям весов.

Крепление на адаптере сделано универсальным и подходит практически под все распространенные моторы. На втором конце адаптера находится резьба для накручивания на 5ти литровую бутылку.
Комментарии (67)


serghs
03.06.2017 20:27+2Как я понимаю, вся ваша методика строится на сочетании двигатель-винт. Может, при определении энергоэффективности конкретного изделия (в смысле квадрокоптера) имеет смысл автоматизировать процесс измерений, особенно если вы, к примеру, имеете двигатель, но хотели бы найти наилучшее его сочетание с геометрией винта?
Да, и есть смысл сменить название статьи, не эффектный, а «эффективный» хотя бы?
HOMPAIN
03.06.2017 20:31Как раз наш стенд и позволяет отделить параметры мотора и винта. Стенд выдаёт эффективность мотора и винта отдельно. Для нас необходимость данного стенда была именно в измерении параметров винта. Отдельно мотор мы и так умеем замерять и достаточно точно моделировать.
Спасибо за замечание, глаза замылились от 50десятого перечитывания, не заметил)serghs
03.06.2017 20:49За мотор и так понятно — классические измерения для тех, кто учился по специальности «Электрические машины». А по «эффективности винта отдельно» — я не понял. Винт может быть только в сочетании с мотором, характеристика строится от числа оборотов. Или у вас не так?
HOMPAIN
03.06.2017 20:56Винт можно измерить с любым мотором и получить на выходе зависимость момента и тяги винта в зависимости от оборотов. Потом эти данные можно использовать независимо от мотора.
serghs
03.06.2017 21:01Вы сами себе противоречите, нет «отдельно», есть винт как нагрузка и вытекающие из этого результаты измерений. Другой вопрос — «в зависимости от оборотов». Именно эту фразу от вас в конечном итоге я и хотел услышать. Это и было написано постом выше. А когда вы уже вывели момент от оборотов, тогда да, теперь вы «на коне» и можете полученную зависимость использовать на все 100%



impetus
03.06.2017 22:35добавить внешний большой вентилятор к стенду для имитации вертикальной скорости коптера и/или косого обтекания не планируете?
Просто то, что покажется оптимумом для задач висения — может оказаться не самым лучшим вариантом для горизонтального полёта например.
Хотя бы себе самим для понимания порядка-степени влияния этих внешних обстоятельств.
(до рекуперациии спуска с высоты кверху огами, дума, пока руки у вас не дойдут)HOMPAIN
04.06.2017 13:47Мне кажется для коптера этл не так принципиально. У него скоролопости винта 100км/ч и полёт на скорости 10-20км/ч сильных изменений не даст. Но идея хорошая, подумаем над реализацией)
impetus
05.06.2017 12:36Вертолёт, обычный классический большой — может нормально лететь с грузом, с которым висеть он не может — упадёт. Вплоть до взлёта с разбегом при только частичной разгрузке амортизаторов, т.е. косое обтекание добавляет довольно много подъёмной силы или, что то же самое — экономит мощности.
Но лучше всё же это дело не на пальцах, а на стенде рассматривать.
Psychosynthesis
04.06.2017 02:19Прикольно, а 3d-модельку этого вашего «адаптера» не выложите?
AllexIn
04.06.2017 09:56Или хотя бы более детальные фотографии, чтобы можно было бы понять общую конструкцию.
Сам планирую собирать квадрокоптер и очень бы хотел повторить подобный стэнд.Psychosynthesis
04.06.2017 15:49Ну по поводу общей конструкции, имхо, как раз вполне понятно — тупо как крышка на бутылку этот адаптер накручивается, а сверху имеет посадочное место для двигателя.

Antilogic
04.06.2017 09:46+1«МЫ» — это кто? Примерно год назад писал всем возможным производителям БК моторов в России, либо не было ответа, либо сразу говорили, что таких же цен, как в Китае, не получится.
HOMPAIN
04.06.2017 13:39Мы — это команда motochrome, занимающаяся производством моторов. Нам пока меньше года, но мы стремительно развиваемся.)
Если интересует мотор под заказ, напишите нам в группу в ВК https://vk.com/motochrome
lolhunter
04.06.2017 15:05А с чего должно быть дешевле-то? Магниты вроде не тут делают. Рынок тут — дай бог 1% от Китая (оооочень оптимистично).

Firelander
04.06.2017 12:04Для эффективного коптера имеет значение не только сферический кпд двигателя, но ещё и удельная тяга, а ваш двигатель выглядит довольно массивным. Жаль, вы не привели больше данных о вашем двигателе. Вес, KV, данные тестирования при разной тяге, чтобы можно было сравнить с ближайшими по параметрам китайцами. Если зайти на сайт тех же саннискаев, там можно найти довольно серьезные таблицы, с не менее чем с пятью значениями тяги, разными винтами и напряжениями. Эффективность 9 грамм на ватт, замеренная в одной точке не говорит ни о чем, потому что она меняется в разы при разном значении тяги, напряжения и в зависимости от винта.
HOMPAIN
04.06.2017 13:42Вес 350г. Кв270. 30 магнитов 27 слотов. Намотка была под 24В питание, на максимальном газу он давал пол 3кг тяги с винтом 1845
clawham
04.06.2017 13:35+4Сразу видно людей никогда не измерявших тягу винта.
Смотрите- у вас как минимум 3 грубейшие ошибки заложены!
1) на стендах особенно на верху бутылки — винт должен дуть вверх/от себя! иначе поток воздуха отражается от пола/стола и возвращает часть тяги многократными переотражениями от струи
2) бессмысленно рассматривать мотор-винт без включения туда ещё и регулятора! А вот регуляторы бывают ооочень разными и даже хорошие качественные не теряющие синхру регуляторы на одном моторе могут другой — греть без повода.
3) обороты мотора вообще-то бесполезная величина а вот процент шима — полезная ибо квадрокоптеры должны иметь номинальную тягу на винте для висения уже на 40% газа!
По пунктам скажу так. простой дешевый мотор IBM IPOWER 2217-1000kv на винте 12-4.5 — этот винт для него тяжелый нереально НО.на тяге 500 грам он выдает 12 грамм на ватт если дуть в пол/стол как вы показываете или реальных чесных 10 г/вт если дуть правильно. тоесть ваши 9 г/вт это мало. с вашим винтомдолжно было получиться больше! вообще правило там простое — чем больше винт тем дольше летаем.
Для компенсации инерции винтов нужно применять регуляторы с активным тормозом. они вопервых имеют намного более высокий кпд на половине газа за счет синхронного выпрямления(когда фазный ток на нулевом периоде шима упирается не в диоды нижних фетов а регулятор сам их открывает и фазный ток упирается в открытый канал низкоомный а не в 1.2 вольтовый диод). Так он ещё и может рекуперацией заниматься… когда резко мозги дают сброс оборотов то обычные регуляторы останавливают мотор просто выбегом — ток по фазам не течет а вот реги с синхронным выпрямлением — они превращаются в буст преобразователи коротя на землю все три фазы и отпуская их на время 20% от цикла шима — этим достигается возврат энергии винта в батарею(правда оно до батареи не доходит — уходит в соседний винт который обычно тут же идет на разгон) этим достигается ещё +10-15% эффективности просто потому что суть полета коптера это постоянные разгоны и торможения и важно чтоб регулятор умел ограничивать и скорость разгона и скорость торможения не выходя в неэффективные зоны больших токов или обесточивания обмоток. Энергию надо возвращать.
Дальше. Раз стоят задача долголетства то нужны батареи с удельной энергией 300 г/вт и больше. на текущий момент есть батареи с нереальными 380 г/вт но у них осень большие проблемы с количеством циклов — 60 всего до потери 20% ёмкости. Ещё по долголетству и стабильности — в 8-микоптере мы применяем переразмеренные для моторов винты тихоходные и попарно 4 малоразмерных винта маломощных на больших оборотах — для стабилизации. Если речь идет о съемке видео тяжелой камерой то флипов не будет и большие винты всегда могут работать в самом эффективном режиме а вот мелкие уже отрабатывают возмущения коптера.Тяги с них не требуется.
Ну и чтоб не быть голословным — октокоптер наш с зеркалкой и 2 кг обьективом в воздухе держится "всего полтора часа висения и час 50 минут в режиме максимально быстрого горизонтального полета!

RusikR2D2
04.06.2017 14:04А что за «регуляторы с активным тормозом»? Можно пару примеров — раньше таких не было.
И можно подробности по использованию разноразмерных винтов на одном коптере. Какая схема — моторы «соосно» или все 8 разнесены? Используются одинаковые моторы? Контроллер один или два независимых?
Спасибо.pdkdrp
04.06.2017 14:57А что за «регуляторы с активным тормозом»?
Раньше, а в прочем и сейчас, это называлось векторным управлением (FOC). Алгоритмы, с одной стороны, общедоступные, с другой практическая реализация представляет определенную ценность, и имеющиеся библиотеки имеют закрытый исходный код и привязаны под конкретное семейство/производителя МК. Например: ST FOC PMSM SDK, TI InstaSPIN… ждем когда Воронеж такой же сделает. У TI готовый дизайн даже есть, только плату переразвести. Также, есть открытые проекты, например VESC.
Spym
04.06.2017 20:11+1Внесу небольшую поправку к вашим словам. Векторное управление и рекуперативное торможение вещи совершенно ортогональные — одно может существовать без другого. Популярный в области лёгких БПЛА вентильный привод с поддержкой рекуперативного торможения (который и подразумевается в вашем предыдущем комментарии) тоже существует. Например, опенсорсный Sapog: https://files.zubax.com/products/io.px4.sapog/Sapog_v2_Reference_Manual.pdf
Не к ночи помянутый VESC тоже, кстати, поддерживает торможение как в вентильном, так и в векторном режиме (но у него есть другие проблемы).
Подробнее о векторном управлении, кстати, прекрасно написано у BelerafonL: https://geektimes.ru/users/belerafonl/topics/.
pdkdrp
05.06.2017 08:33За ссылку на статьи BelerafonL большое спасибо!
Не к ночи помянутый VESC тоже......(но у него есть другие проблемы).
Можно поподробнее, что за проблемы?
Присматриваю себе под несколько нестандартный квадрокоптер регулятор с CAN(желательно), обратной связью и векторным управлением под мотор 2-5КВт, на глаза попался этот. Может подскажете другие варианты?Spym
05.06.2017 12:56Мы обнаружили у VESC проблемы стабильности при работе в бездатчиковом режиме и трудности с идентификацией.
У нас есть прототип регулятора с CAN, обратной связью, и векторным управлением на 600 Вт, и к концу года должна выйти более мощная модель до 10 КВт. Если у вас есть интерес, напишите, пожалуйста, мне на pavel.kirienko@zubax.com.
HOMPAIN
04.06.2017 14:24+1Да, действительно работа с воздушными винтами для нас в новинку и мы допустили ряд ошибок. Под нашу задачу можно было сделать мотор меньшего размера, текущий же получился под совсем гигантский винт.
С измерением с бутылкой проблем не было. Тяга примерно совпадает с показаниями стенда. Видимо для 2212 мотора высоты бутылки достаточно. На крайний случай можно поставить весы на угол стола или на высокую подставку.
С esc также замечал такую проблему и у нас планах есть задача разработать свой. Тогда его можно будет оптимально настроить под каждый мотор.
AllexIn
04.06.2017 14:25+1То есть вы в октокоптере используете два разных комплекта винтов одновременно?
4 для мощности и 4 для маневренности?
И как с этим справляется полетный контроллер? Вы уникальную прошивку делали или используемый вами полетный контроллер умеет такое в стоке?
pdkdrp
04.06.2017 15:01на текущий момент есть батареи с нереальными 380 г/вт но у них осень большие проблемы с количеством циклов — 60 всего до потери 20% ёмкости.
Ссылочками не поделитесь?clawham
04.06.2017 15:54+2<a href="https://www.youtube.com/watch?v=VkWYsn4ykLg">https://www.youtube.com/watch?v=VkWYsn4ykLg</a>
Я в этом проекте только програмист. Собственно полетник АРМ2,8 в прошивку которого конечно же внесены поправки. все поправки сведены на то чтоб маневринниками дергать рещще а основными тяговыми — намного более плавнее — там пиды сильно задушены на крен тангаж и рысканьне но зато задерты — на высотомер.
Моторы разные. все разнесены через один тяговые 200 кв, маневренники 1000 кв. типоразмер моторов один и тот же.
Регуляторы я не знаю где и какие они берут. С виду обычные регуляторы с драйверами и конденсаторным качером для накачки 15 вольт управления затворами только техасский чип какой-то дсп. я туда не лажу. конектится все по i2c 600 гц
Изначально подобный прием мы применили два центральных соосных огромных винта. получилось так себе — изза центробежки мешало управлению. чуток поменьше и помедленнее но 4 — дало идеальный стаб. Пробовали и 4 луча с двумя моторами вверху и внизу — ерунда. Если верхними ставили большие и медленные то нижние работали на 80% газа и плохо было с торможением — грелись обмотки и регулятор. по логам было видно что 70% торможения и 30% разгон по времени. тоесть ниже кпд изза сильно набегающего потока… да и винты под такое дело не рассчитаны… в общем с тем же весом и теми же батареями полетное время час максимум. нас это категорически не устраивает...
Ещё о октокоптере — 2-3 мотора могли отказывать — он всеравно возвращался. только если через один разрушить два мотора с одной стороны — тогда он терял возможность по yaw держаться но даже в таком варианте с хорошим компасом оно возвращалось хоть и по yaw все время вращался :) выглядело как бешаная мясорубка :) Да мы летаем в АТО и отказоустойчивость у нас почти первое дело было. две батареи физически разнесенные, электронный отрубатель "пробитой" батареи и мозги за кевларовой пластиной.
Ещё пробовали на двс летать… тоесть компер электро но на липольной батке на 10 минут(для аварийной посадки) и бензогенератор на ICE methanol OsMax 90. Полная чушь… они тоже палива жрут как дурные при этом вес генератора выпрямителя мотора бака и буферной батареи намного больше… короче больше 2-х часов мы не получили а по весу перетел — получили… пока отказались от этой затеи — выгоднее больше аккумов.
Про аккумы уточню что за конкретная модель. Регуляторы действительно FOC с отслеживанием вч модуляцией положения ротора и т.д. говорят — готовый техасский переразведенный демоборд.

Firz
04.06.2017 22:51Что означает характеристика «удельная энергия 300 г/вт»?
clawham
04.06.2017 23:00Это значит что собранный аккумулятор с запасом энергии 300 ваттчасов будет весить один кг :)
Сори… ошибся с наименованием размерности… выбирал на смарте из выпадающего списка :) как редактировать сообщения — не знаю.
Firz
04.06.2017 23:10Это очень не слабо, особенно учитывая что они должны при этом отдавать неплохие токи. Было бы очень интересно узнать что именно за химия такая используется или какая-то конкретная модель, если это массово производится.
Firz
04.06.2017 23:37Посмотрел на сайте, видимо речь шла не про Ваши аккумуляторы, а в целом, потому что у ячеек LG 18650 D1 из которых сделаны Ваши аккумуляторы(т.е. даже без учета веса обвязки и хотя бы обмотки из duck-tape) плотность энергии 225 Вт*ч/Кг при токе разряда 1А на ячейку. (У модели 48В 10Ач с сайта получается 215 Вт*ч/Кг, если брать ток 1А на ячейку)
Даже если взять Panasonic NCR18650B, у них при токе разряда 1А на ячейку плотность энергии получается 250 Вт*ч/Кг
Shpiler
04.06.2017 14:26Производители дают минимальный набор характеристик для своего товара. По винтам вообще невозможно найти какой либо информации кроме их размера.
А как же продукция T-Motor? У них даются весьма подробные характеристики по винтомоторным группам, в т.ч. эффективность г/Вт при разных напряжениях и уровнях газа

courser
04.06.2017 20:00Вообще-то, чтобы объективно измерить КПД двигателя, нужно разделить винт-моторную пару и заменить винт динамометрическим эквивалентом.
Тогда можно найти диапазон оборотов дающий максимальную эффективность при различной нагрузке.
Соответствующая отдельная процедура нужна и для винта.
Тогда можно будет подбирать винт-моторные пары не методом тыка, а вполне осознанно.
Странно, что никто ещё не озаботился реализацией такого стенда.HOMPAIN
05.06.2017 16:09А какая разница измерение с винтом или динамометрическим эквивалентом? Мы меряем входную и выходную мощность мотора, этого достаточно для определения КПД. И как бонус мы сразу получаем характеристики винта.
courser
05.06.2017 18:22Вы измеряете тягу и момент для конкретной ВМ пары. Получается общая кривая по RPM.
Вы не можете разобрать по ней отдельно вклад мотора и винта. Только комплекс.
А имея отдельные кривые можно подобрать идеальную пару с максимумом кпд на нужной тяге.HOMPAIN
05.06.2017 19:39Как раз можем. У нас получается отдельно эффективность винта(около 15 г/ватт) и мотора с винтом(5г/ватт для китайского). Для винта после этого получаются все необходимые параметры и его можно уже оценивать для использования с любым мотором. Для мотора получаются параметры только с моментом винта, но мотор мы отдельно умеем мерить в полном диапазоне параметров.
MrRIP
08.06.2017 02:13Может я для вас открою «америку» — в природе есть такая штука, как «калькулятор моторной группы» для самолётов — там задаются параметры моторов/винтов\аккумляторов/регляторв, плюс можно задать тепловые параметры и параметры самой модели. На выходе кривые мощности-кпд-потребления на большом участке скоростей.
Навскидку вот: https://www.ecalc.ch/ — все данные по сути собраны «вручную» на большом количестве мотоустановок.
Вот отдельная ссылка на «коптерную» версию.
И да — измерять «винт» и «мотор» нужно отдельно! То, что ВЫ намеряли — «филькина грамота». Точнее — для построения характеристик винта вам нужно его «прогнать» во ВСЁМ диапазоне оборотов/моментов для получения множества выходных эпюров. И уже от них плясать. И да — замерив и выведя один эпюр вы получите только конкретную кривую под конкретное соотношение оборотов/моментов. Меняем что-то одно — и кривая поползла…
К слову о «птичках» — у вас двигатель максимальный КПД на динамонагрузке какой имеет? А максимальную мощность(и какой при этом КПД)? Создание энергоэффективно" установки начинается с промера ДВИГАТЕЛЯ. далее берутся «учебники» и вычитываются примерные винты. которые подойдут под этот двигатель при уже измеренных оборотах и мощности. И начинаются пляски с бубном — свести воедино три кривых — тяга-КПД-мощность.
А, и да — самый максимальынй КПД из «вентильных» имеют двигатели без железа в статоре вообще. Да, мощность при тех-же габаритах ниже. Зато реально можно получить 95-98% КПД.HOMPAIN
08.06.2017 02:31Как измерить винт без мотора? Кто запрещает на нашем стенде прогнать винт по оборотам? Кому что надо, тот то и меряет.
У нашего мотора в текущей намотке максимальный КПД 85% на 4700RPM при мощности 750Вт и моментом где-то 1.5Нм. Теоретический максимум будет при перемотке на большую мощность, что даст 90% КПД где-то при 8000RPM при мощности 1400Вт и моментом где-то 1.5-1.7Нм. Установка для замера мотора у нас уже есть.
Двигатель без железа при той же мощности, габаритах и оборотах даст нулевой КПД. Они при том же размере дают высокой КПД при мощности в 10 раз ниже.MrRIP
08.06.2017 06:33Хм. Всеголишь 4700Об/мин? Не маловато-ли? Да и 750Вт для таких габаритов ОЧЕНЬ мало.
При габаритах как у вас Контроник Танго даёт 2 киловатта(продолжительно тем самые 750-800Вт). И КПД 96%. Да — он «безжелезный». масса его равна 286грамм.
Скорпион, который железный при таких габаритах выдаёт даёт до 4-5кВт(продолжительно до 2кВт). О каких «в десять раз ниже» разговор? Вы вообще нормальные модельные двигатели в руках держали?
Да, коль у вас мотор столь «тихоходный» — может стоит думать в сторону не двулопастного, а трёх-четырёх лопастного винта с немного увеличенным шагом? Чтоб полностью раскрыть параметры мотора…HOMPAIN
08.06.2017 07:01Данные обороты дают нам нужную тягу с винтом 18дюймов.
Надо учитывать что мощность пропорциональна оборотам и я не думаю, что эти безжелезные моторы выдают такую мощность на 4700 оборотах. Так, например, сейчас мы делаем мотор для турбины на 5КВт, примерно в таких же габаритах, но с оборотами 50к RPM. У него кстати КПД будет теоретически 93%.

MrRIP
08.06.2017 07:11Путём установки «редуктора» и смирением с небольшой потерей кпд(2-3%) можно получить любые обороты ;) А имея кпд на моторе более 95% можно играться с редукторами как вам заблагорассудится!
Судя по размерам вес вашего около килограмма?
По винту — поставьте 16 дюймов. но на три лопасти :) Или даже на четыре — смотря как поведёт себя движок.HOMPAIN
08.06.2017 07:22С редуктором не всё так просто. Обычные подшипники рассчитаны на обороты до 40к и даже на меньших оборотах без подачи масла они как расходники идут. С редуктором будет дополнительная поперечная нагрузка на ось и подшипники сотрутся ещё быстрее. Так что редуктор на большие обороты ещё та проблема. Проще оказывается конструкцию мотора сразу под нужные параметры делать.
Вес мотора с винтом 350г. Какой у этого пока не известно, заранее не считали, поскольку он тут не важен.MrRIP
08.06.2017 08:28так примените «необычные» — сейчас керамика и метал-керамика не настолько дорогие как-бы ;) и без подачи масла они отлично работают.
А про редуктор на 40к оборотов — ничего сложно — главное соблюдать технологию производства зубчатых колёс и не гнушаться балансировкой.
Кстати — вы свои двигатели как балансируете?

Shrizt
07.06.2017 16:54Эффективность же у нас получилась 9г/Ватт. Так что даже с учетом гораздо большего веса мотора, даже небольшой коптер с нашим мотором смог бы летать дольше.)
Вот совсем не факт… если ваш мотор весит 10кг, то 9 грамм он на ватт дает, или 29 — не полетит он…
Ну в целом много выше комментариев уже, я думаю следующий девайс вы сделаете более годным :)
И по безопасности, я бы управление сделал выносным, а стенд прикручивающимся. А то руку приходится пихать чуть ли не в пропеллер, да и погрешность она вносит…
Nesenin
07.06.2017 23:25Стенд ваш бестолковый. С чего вы взяли что можете таким креплением тензомостов правильно замерить момент?
Уже написали пропеллер должен дуть в пустоту, причем объем этого пространства должен быть как можно больше, что б не влияло на измерение циркуляция воздуха. Я на этом собаку съел, кучу раз переделывал стенд.
Не самый последний вариант. Требует 90м^3 минимум для корректных замеров.

Ваши замеры и близко не отражают действительность. Про КПД не превысившей 50% смешно.
Сколько замеряю, все моторы близки по максимальному кпд, надо только нагрузку подходящую. Меньше 60% max не видел. см
HOMPAIN
08.06.2017 02:38Для проверки момента я неоднократно калибровал стенд весами и грузами подвешенными на рычаге. Также я весами во время работы под рычагом сверял данные с показаниями стенда. Поскольку для нашего мотора известен создаваемый момент при определённых условиях работы, то это тоже позволило проверить показание стенда. После множества тестов данная конструкция удовлетворила меня по точности.
Shrizt
08.06.2017 13:58Думаю надо дать моторы авторов для тестирования на ваш стенд, для независимого тестирования :)
Отличная работа и статья, спасибо!
Uncle_Co
08.06.2017 07:10«Эффективность ВМГ», по-моему, всегда называлась «удельной тягой» (сила тяги / мощность мотора)
Negedge
13.06.2017 09:06Вы продаёте подобный стенд? сколько стоит, какие сроки?
HOMPAIN
13.06.2017 09:20Да, как раз одной из целей у нас было создать подобный продукт для продажи.
Стенд в статье имеет не финальный вид. В финале сбоку будут разъёмы питания XT-60, немножко изменится дизайн и будут поправлены некоторые косяки присутствующие в текущем прототипе.
Цена данной модели 10000р, срок изготовления — месяц(из-за ожидания некоторых электронных компонентов).
Также мы сейчас разрабатываем модификацию стенда в стальном исполнении. Он будет рассчитан на большую тягу(до 20кг) и момент, будет более точный. И у него экран с управлением будет на выносном пульте. Но делать его дольше и его цена будет значительно выше.
Если я вас заинтересовал или есть дополнительные вопросы. То можно обратиться к нам в группу ВК https://vk.com/motochrome или на емэил motochrome@list.ru
AllexIn
А можно увидеть проект вашего сложного стэнда? интересует схемотехника в первую очередь.
HOMPAIN
Вот схема: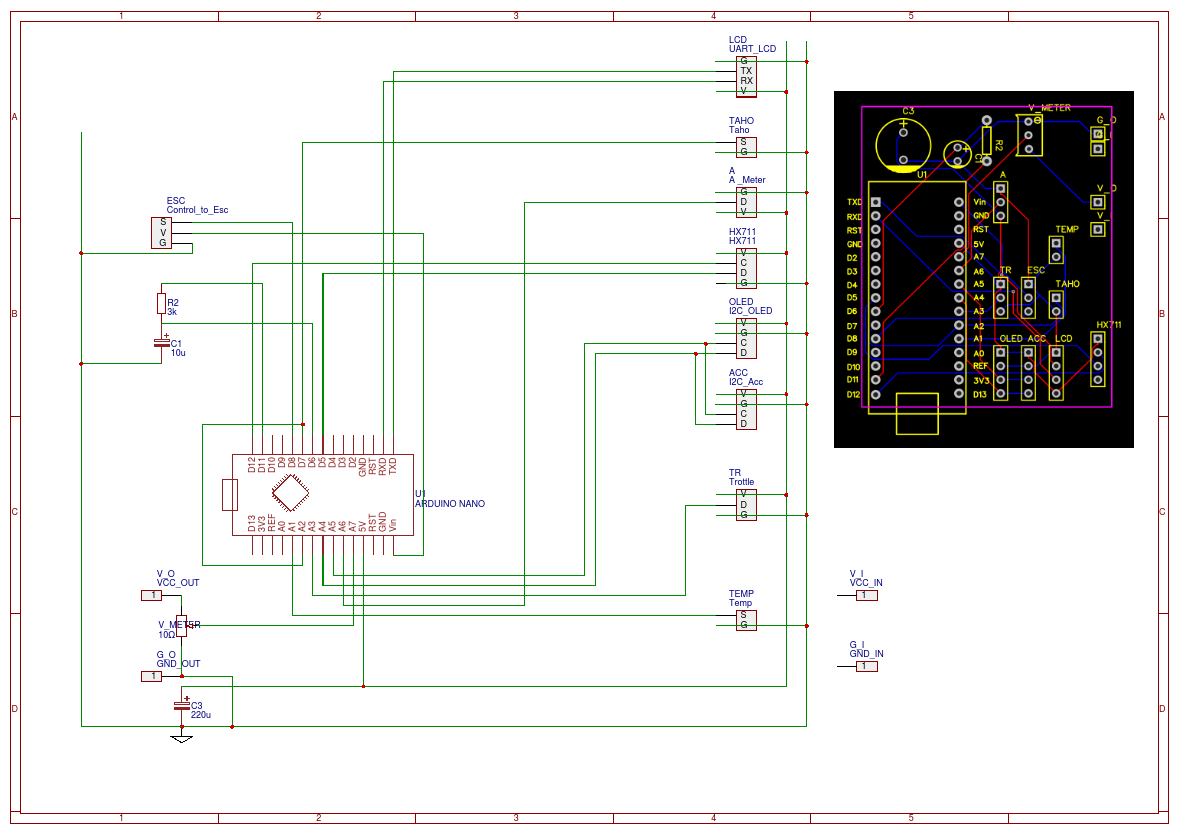
До этого печатные платы не делал, поэтому прошу отнестись к этому снисходительно)