Введение
В нашем университете, создан, и не первый десяток лет развивается учебно-лабораторный комплекс «Виртуальная железная дорога». Комплекс включает в себя не только тренажеры подвижного состава, но так же тренажеры рабочих мест поездных диспетчеров, дежурных по станции, энергодиспетчеров, тренажеры оборудования для диагностики верхнего строения пути. Если говорить конкретно о тренажерах подвижного состава, то замечу, что специфика их разработки несколько отличается от концепции тренажера для машиниста. Железнодорожный вуз не готовит машинистов, наши выпускники — инженеры железнодорожного транспорта. Поэтому в задачу тренажера локомотива или электропоезда входит не только ознакомление студента с устройством кабины, органов управления, приемов и правил управления подвижным составом. Тренажер подвижного состава является ещё и моделирующей установкой, которая в реальном масштабе времени воспроизводит работу систем подвижного состава. При их проектировании основной упор делается именно на то, какие процессы протекают в оборудовании машины в разных режимах её работы, как отражается на этих процессах воздействие на органы управления.
Совсем недавно наша команда закончила разработку тренажера скоростного электропоезда ЭС1 «Ласточка». О нем и пойдет речь далее
1. Программная часть и общая структура тренажерного комплекса
Что значит создать железнодорожный тренажерный комплекс? Это означает разработку программно-аппаратной системы, включающей в себя
- Имитацию рабочего места машиниста — пульт управления со всеми органами и средствами отображения информации;
- Вычислительный комплекс, осуществляющий моделирование в реальном времени динамики движения поезда, работу его систем: силовой электрической схемы, тягового привода, тормозного оборудования;
- Устройство сопряжения органов управления, средств отображения информации на пульте и, если необходимо, реального оборудования поезда, включенного в состав тренажера с компьютерной моделью.
- Систему визуализации вида из кабины с рабочего места машиниста
- Подсистему управления тренировкой с возможностью визуального представления и анализа данных о работе систем поезда
В итоге, всё это вылилось в систему, структура которой изображена на рисунке
Функциональная схема тренажерного комплекса электропоезда ЭС1
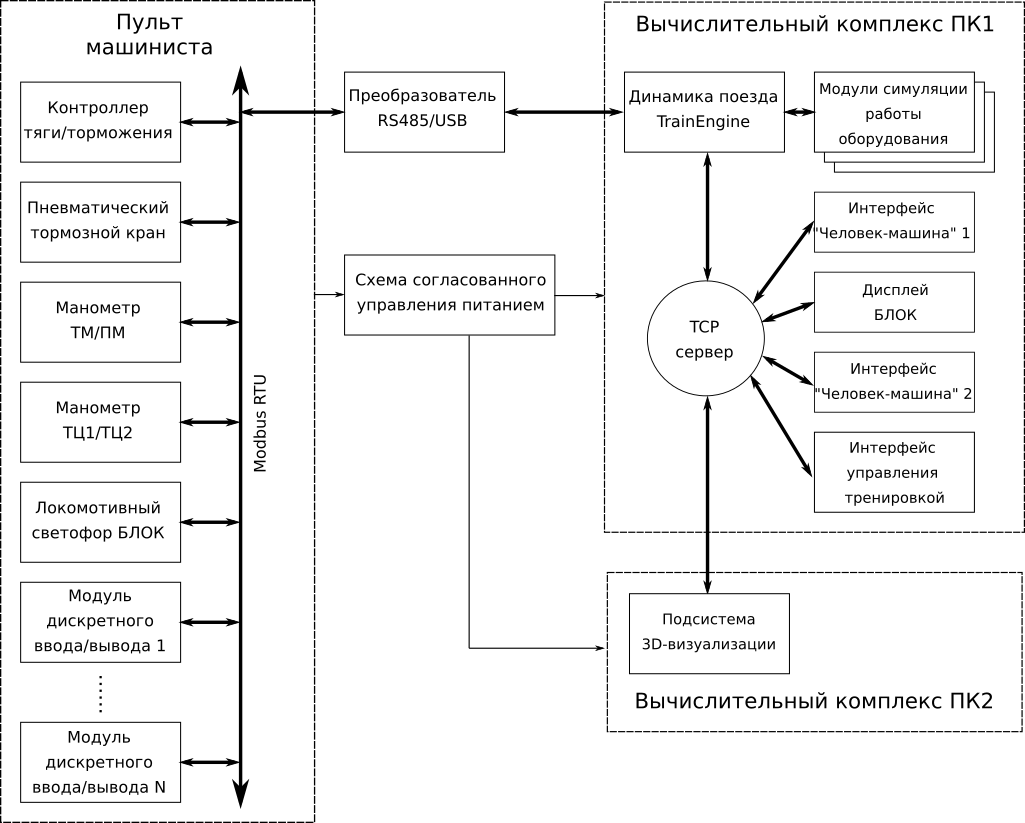
Вычислительный комплекс тренажера составляют два компьютера (ПК1 и ПК2), соединенные в локальную сеть посредством бытового маршрутизатора (TPLink 842 nd rev3, ничего экстраординарного) с возможностью удаленного доступа в систему по Wi-Fi.
В качестве системной платформы для обоих машин выбрана ОС на базе GNU/Linux. Причины следующие:
- Свободная лицензия;
- Возможность глубокой кастомизации состава системного ПО;
- Ориентированность системы на встраиваемые решения;
- Поддержка ядром всей необходимой переферии «из коробки».
Не смотря на то, что используются в общем-то бытовые ПК, прикладное программное обеспечение в такой системе должно выводить пользователя на такой уровень восприятия, где он не будет даже догадываться о том, что внутри есть какая-то там операционная система. Никакой клавиатуры! Никакой мыши! Долой рабочий стол! Пришел, повернул выключатель питания, подождал недолго и получил готовую к работе систему. Тут можно очень долго спорить, но линукс в смысле простоты реализации подобного подхода далеко обходит другие ОС. Среди пестрого разнообразия дистрибутивов наш выбор остановился на Arch Linux по следующим причинам:
- Возможность глубокой кастомизации на этапе развертывания системы;
- Rolling -релиз, а значит свежие версии пакетов;
- Бинарные пакеты, в отличие от того же Gentoo, а значит высокая скорость развертывания и обслуживания системы.
ПК1 является основным, на нем работает компьютерная модель поезда, структурно представленная движком динамики поезда TrainEngine, который выполняет моделирование движения механической части поезда и модулями, реализующими математические модели оборудования, не связанного с механикой. Эти модули, вместе с модулем TCP-сервера и библиотекой Modbus RTU образуют единый исполняемый модуль вычислительного ядра.
TrainEngine реализует так называемую обобщенную модель поезда. Любой поезд, будь то скоростной электропоезд или грузовой состав механически представляет собой систему связанных тел, движение которых ограничено конфигурацией верхнего строения пути. К колесным парам некоторых тел прикладываются моменты, обеспечиваемые подсистемой тяги и тормозами. Так что для любого тренажера функционал будет одинаковым. Поэтому вся механика движения поезда выносится в отдельные конфигурируемые библиотеки. Различие между типами подвижного состава реализуется на уровне программных моделей остального оборудования.
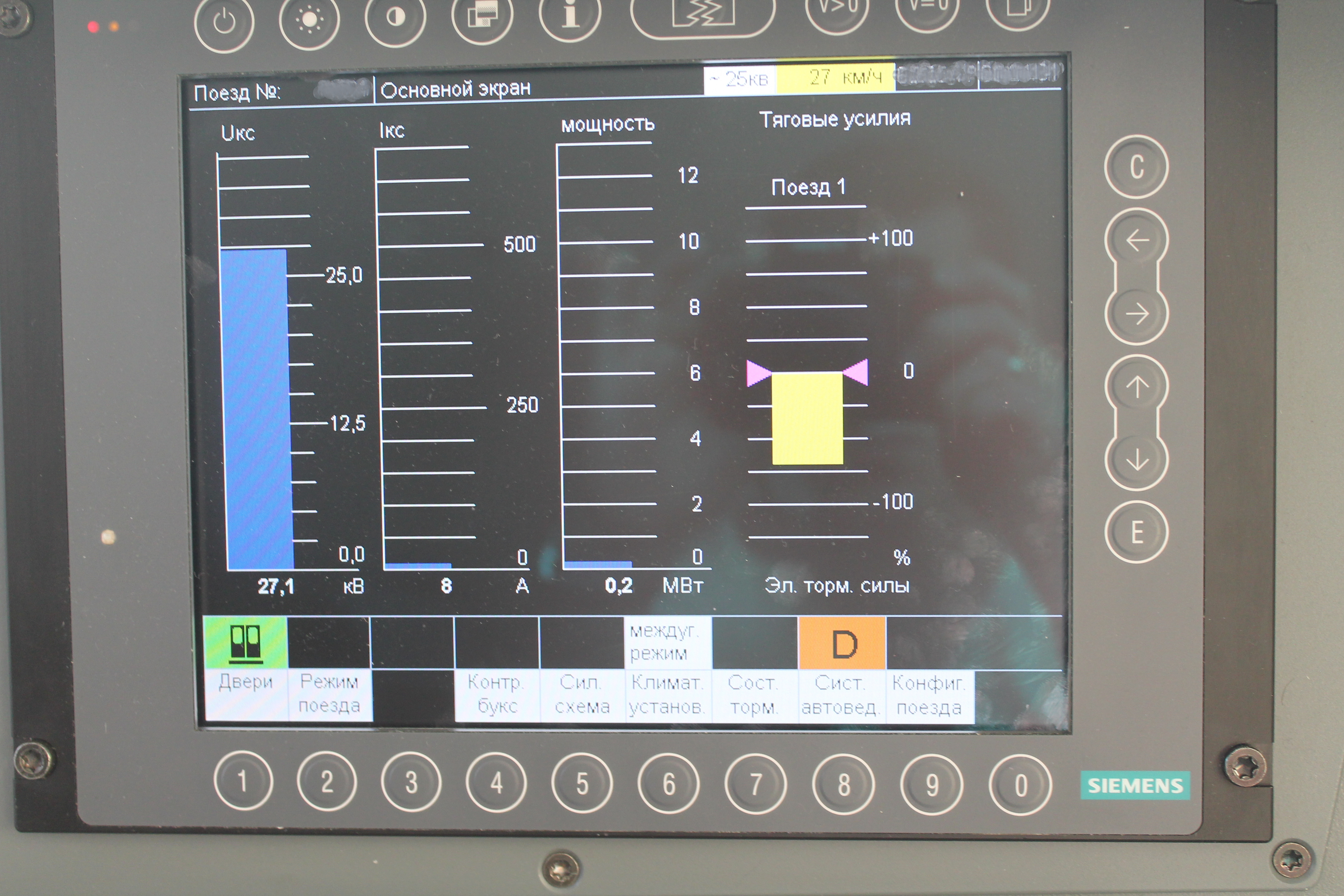
Интерфейс взаимодействия машиниста с современным локомотивом/электропоездом сегодня насыщен дисплейными модулями. Фактически, множество средств отображения информации, реализуемое раньше стрелочными приборами свелось к совокупности компьютерных экранов, на которые выводится текущая информация. На той же «Ласточке» таких экранов четыре: два многофункциональных интерфейса «человек-машина», дисплей безопасного локомотивного комплекса (БЛОК) и дисплей системы видеонаблюдения.
Интерфейс «человек-машина» реального электропоезда
Дисплей безопасного локомотивного комплекса (БЛОК)

Интерьер кабины и расположение дисплеев на реальном электропоезде

На настоящем электропоезде каждый дисплейный модуль — отдельный промышленный компьютер, общающийся с системой управления по специфическим протоколам MVB/WTB. Работают эти модули под управлением Windows XP Embedded (да-да, представьте себе!).
В нашем случае подобное расточительство бессмысленно — четыре тачскина от фирмы Elo, подключенные к ПК1 через кабели Display Port и USB для тач-интерфейса. Дисплейные модули реализованы в виде отдельных процессов, общающихся с вычислительным ядром через TCP-сокеты. Настройка Xorg разрешает каждому окну жить исключительно в предназначенном для него мониторе. Аппаратные кнопки на рамке дисплея имитируются программно.
Удалось воспроизвести основной функционал этих устройств, касающийся систем электропоезда, ответственных за тягу и торможение. Приложения написаны на C++ с применением фреймворка Qt5. Вообще, Qt5 пронизывает всё программное обеспечения, в виду его высокой приспособленности как к созданию пользовательских интерфейсов, так и наличия библиотек для работы с протоколами TCP/IP и Modbus RTU. Плюс знаменитая технология «сигнал-слот» оказалась совершенно незаменима при организации взаимодействия классов на всех уровнях.
Интерфейс «человек-машина» тренажера

Дисплей БЛОК тренажера

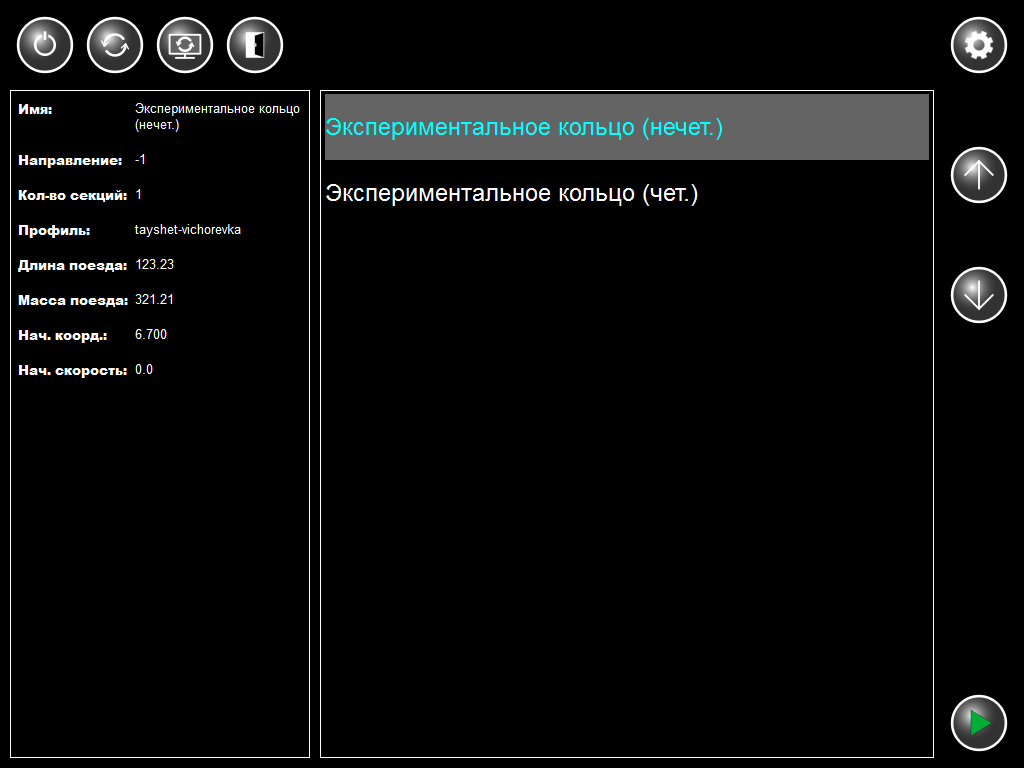
В силу специфики именно нашего тренажера дисплей системы видеонаблюдения оказался без надобности, вместо него оставшийся экран был использован под наши нужды для управления запуском тренировки, настройки и управления питанием компов.
Интерфейс запуска тренировки
2. Аппаратная часть — органы управления и распределенное устройство сопряжения
Самой сложной и дорогостоящей операцией является оснащение тренажера органами управления, аутентичными реальной кабине. О том чтобы закупить оригинальные железки не заходит речь по двум причинам. Первая — огромная стоимость оригинальных узлов, оправданная их применением на реальном подвижном составе и изготавливаемых по соответствующим требованиям. Вторая — сопряжение с ЭВМ затруднено тем, что на реальном подвижном составе используются закрытые протоколы взаимодействия аппаратуры и системы управления. Единственным выходом для нас стало самостоятельное проектирование и изготовление таких элементов как контроллер тяги/торможения, тормозной кран и манометры тормозной системы электропоезда.
Чтобы было понятно, речь идет прежде всего об этом рычаге
Реальный контроллер тяги/торможения в кабине электропоезда

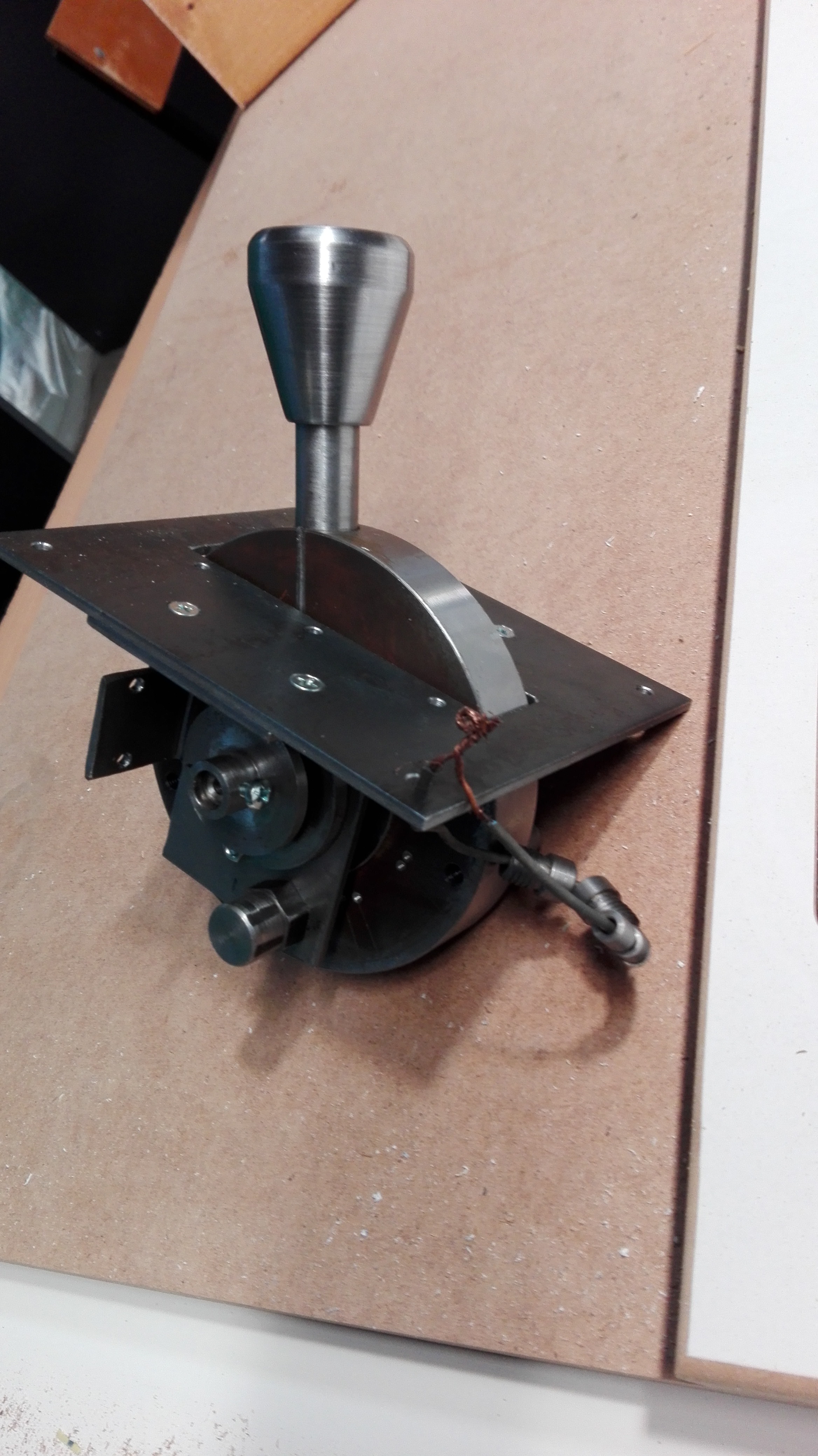
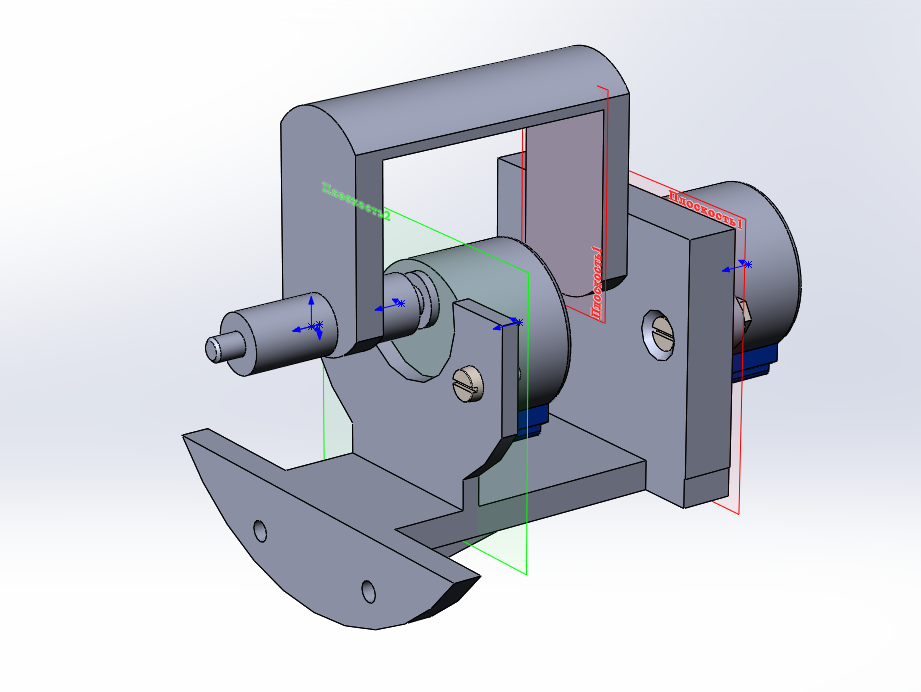
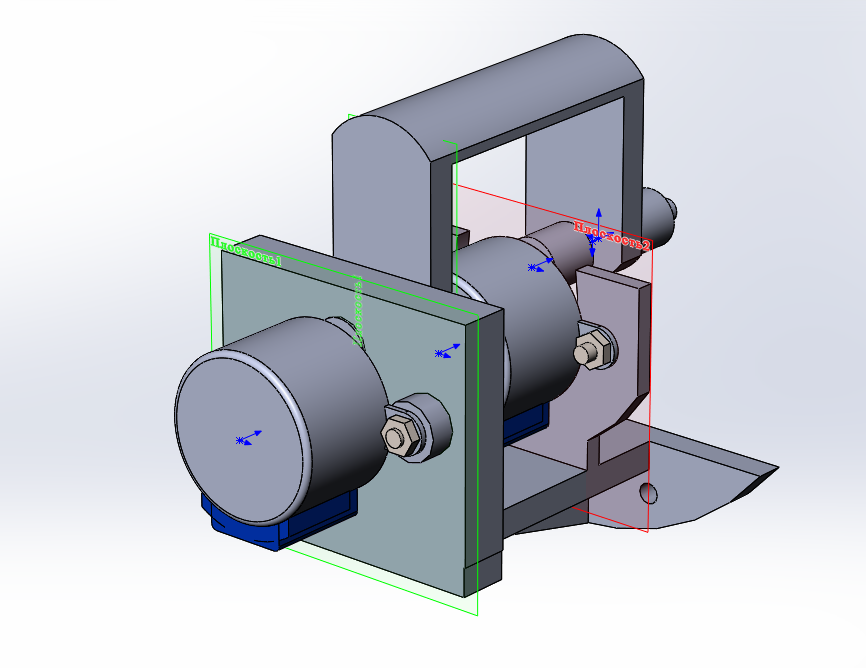
Его внешние размеры, то что торчит над панелью, под скептические улыбки локомотивной бригады «Ласточки» удалось обмерять штангелем. Внутренности мы спроектировали так, как нам представлялось удобным в плане компоновки агрегата в будущем пульте и установки на нем измерительных преобразователей. Получилась такая концепция, унифицированная для обоих «джойстиков»
Концепция унифицированного контроллера для тренажера

Пневматически тормозной кран отличается от контроллера тяги лишь начальным положением рукоятки в «нуле» и наличием пластиковой декоративной накладки. В остальном контроллеры получились унифицированы по деталям, датчикам и электронным платам.
В качестве датчиков положения использованы инкрементальные энкодеры, для установки нуля в управляющей программе применен оптический датчик нулевой позиции. Прошивка электронной части устройства опрашивает экодер и оптрон и выдает на выходе положение рукоятки в процентах тяги/тормозного усилия и ряд логических признаков: нулевая позиция, нажатие колпачка на рукоятке, режим экстренного торможения.
Под спойлером ещё ряд фото, поясняющих в общих чертах конструкцию этих устройств.

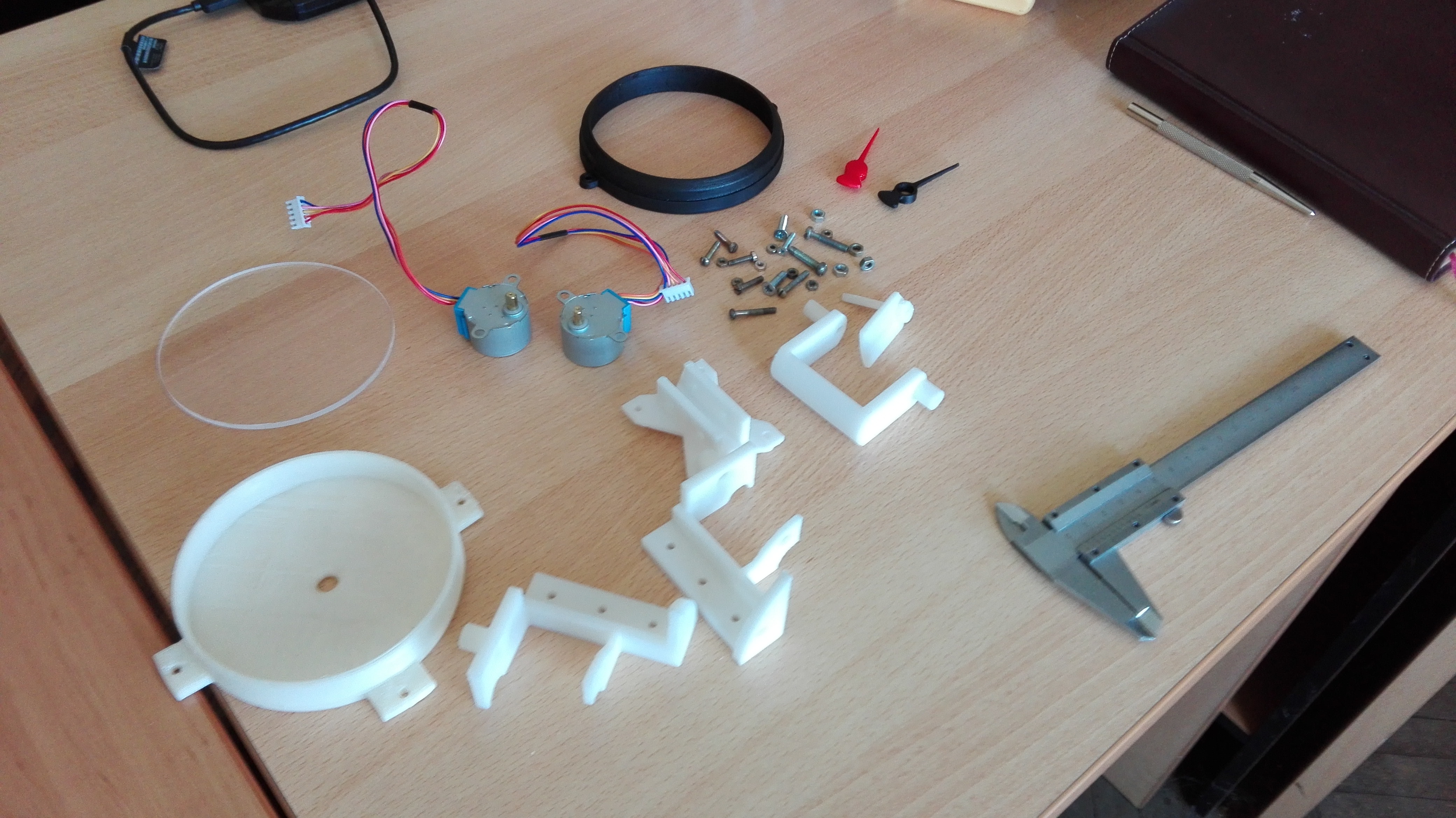
Окрашенный комплект контроллера тяги

Механика контроллеров сразу после порошковой окраски. Примеряем энкодеры

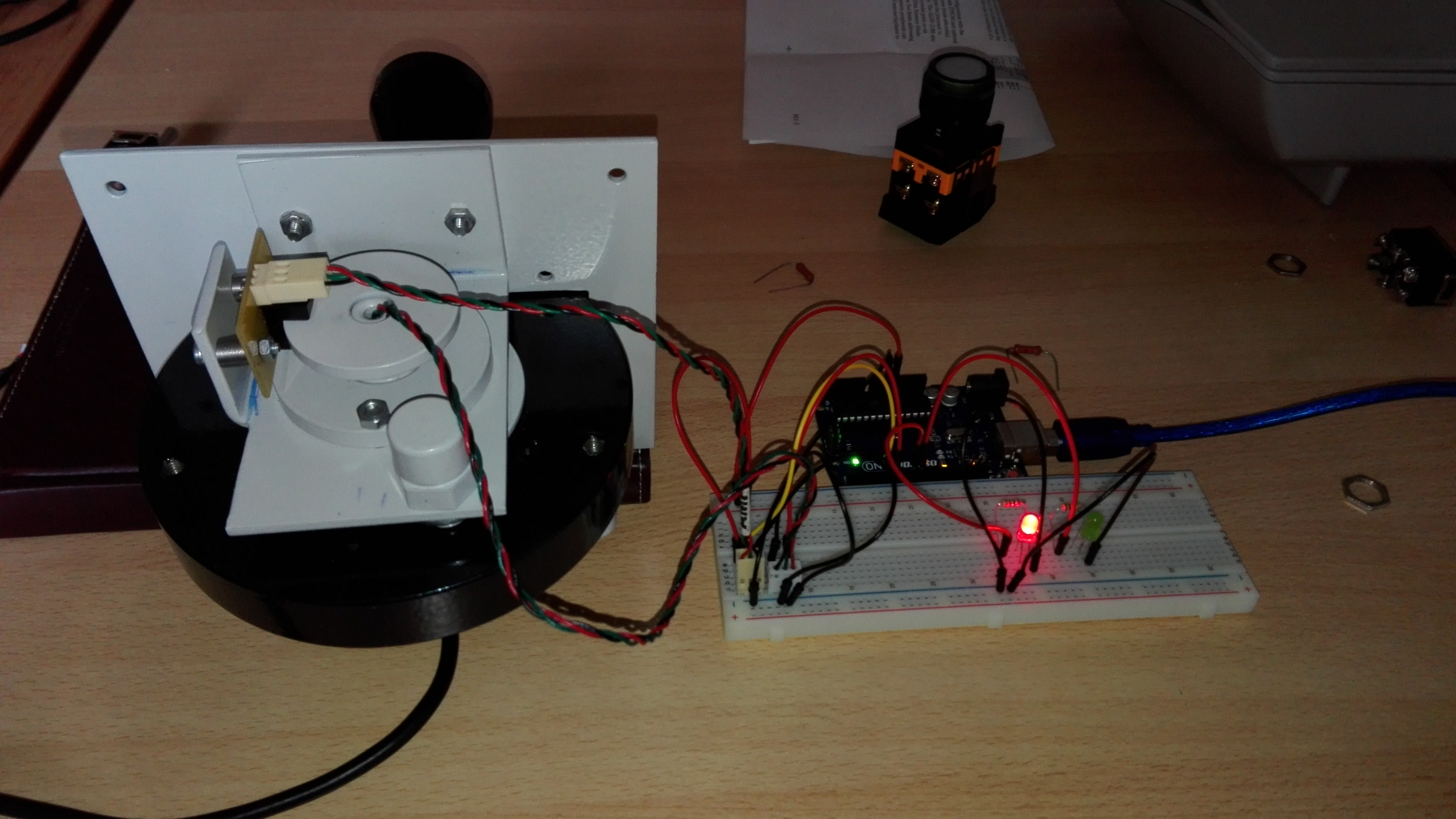
Подопытный на отладочном стенде
Пневматический кран машиниста после установки декоративной накладки, напечатанной на 3D-принтере

Отлаженный контроллер тяги в сборе с «мозгами»

Контроллер тяги, установленный на штатную панель. Виден соседний модуль дисктретного ввода/вывода


Другим камнем преткновения стали манометры, вот эти
Контрольные манометры пневмосистемы электропоезда

Даже если бы мы и заполучили штатные — эти приборы пневматические, подключаемые к трубопроводам тормозной системы. Нужен был прибор, отображающий давления, приходящие из компьютерной модели. Плюс имеющий вид, походящий на оригинал. Плюс, не имея возможности изготавливать шестерни, пришлось исхитрится и придумать бесшестеренчатый механизм, позволяющий поворачивать две стрелки независимо
В итоге, после пары месяцев раздумий, разработки, изготовления и отладки вышел такой агрегат

Отладка при написании прошивки

С другими органами управления проблем не возникло — остальное просто кнопки и выключатели. Однако, их количество вполне достаточно, для того чтобы задуматься над тем, каким образом все эти сигналы ввести в компьютер.
Решили пойти проторенным в промышленных масштабах путем — RS485 наше всё. Короткие жгуты от кнопок и контрольных ламп идут в платы дискретного ввода/вывода, а уже оттуда их состояние вводится в машину по двум проводкам витой пары.
Панель в зоне J пульта машиниста вид сверху

… вид снизу на монтаж. Видны платы ввода/вывода
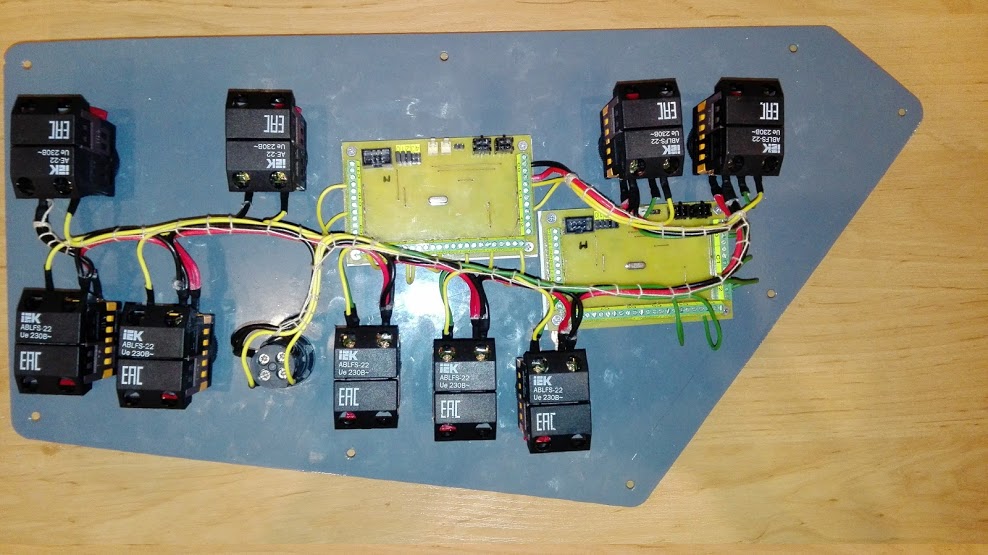
В качестве протокола обмена данными был выбран Modbus RTU в силу своей простоты, открытости и распространенности в областях, связанных с промышленной автоматизацией. Платы дискретного ввода/вывода универсальны и устанавливаются на панели пульта по месту, где в них имеется необходимость. Для таких устройств как контроллеры и манометры, а так же локомотивный светофор в силу специфики их работы применены отдельные решения.
В итоге получилась сеть на 12 абонентов. Ввод сигнала в вычислительный комплекс производится через адаптер RS485/USB. В ПО использована готовая реализация Modbus RTU из фреймворка Qt5.
Потроха пульта перед окончательной сборкой тренажера


Отладка в самом разгаре

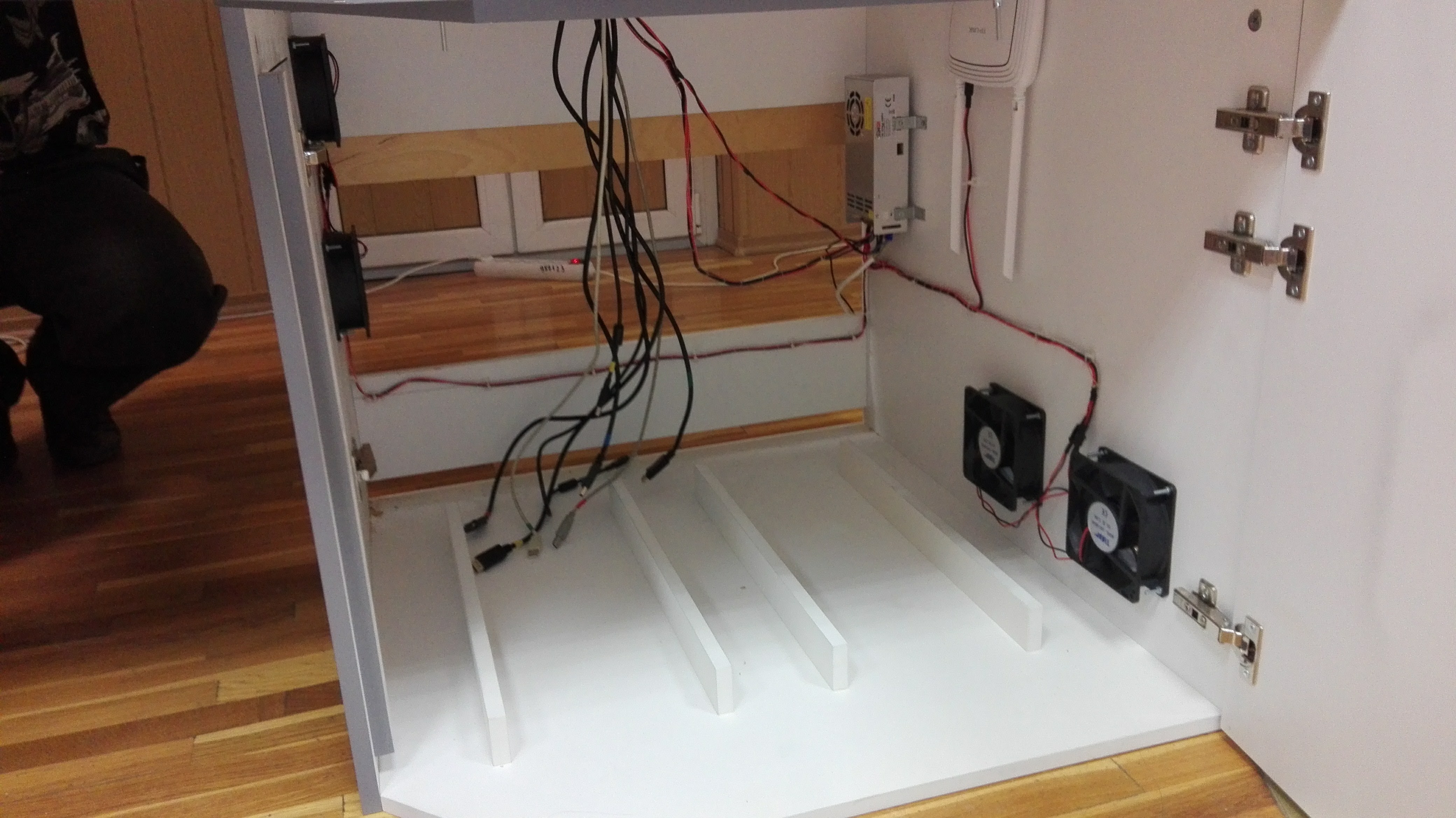
Отсек электрооборудования
Какой-то из этапов финальной сборки

Собран и отлажен. Готов к монтажу в кабине

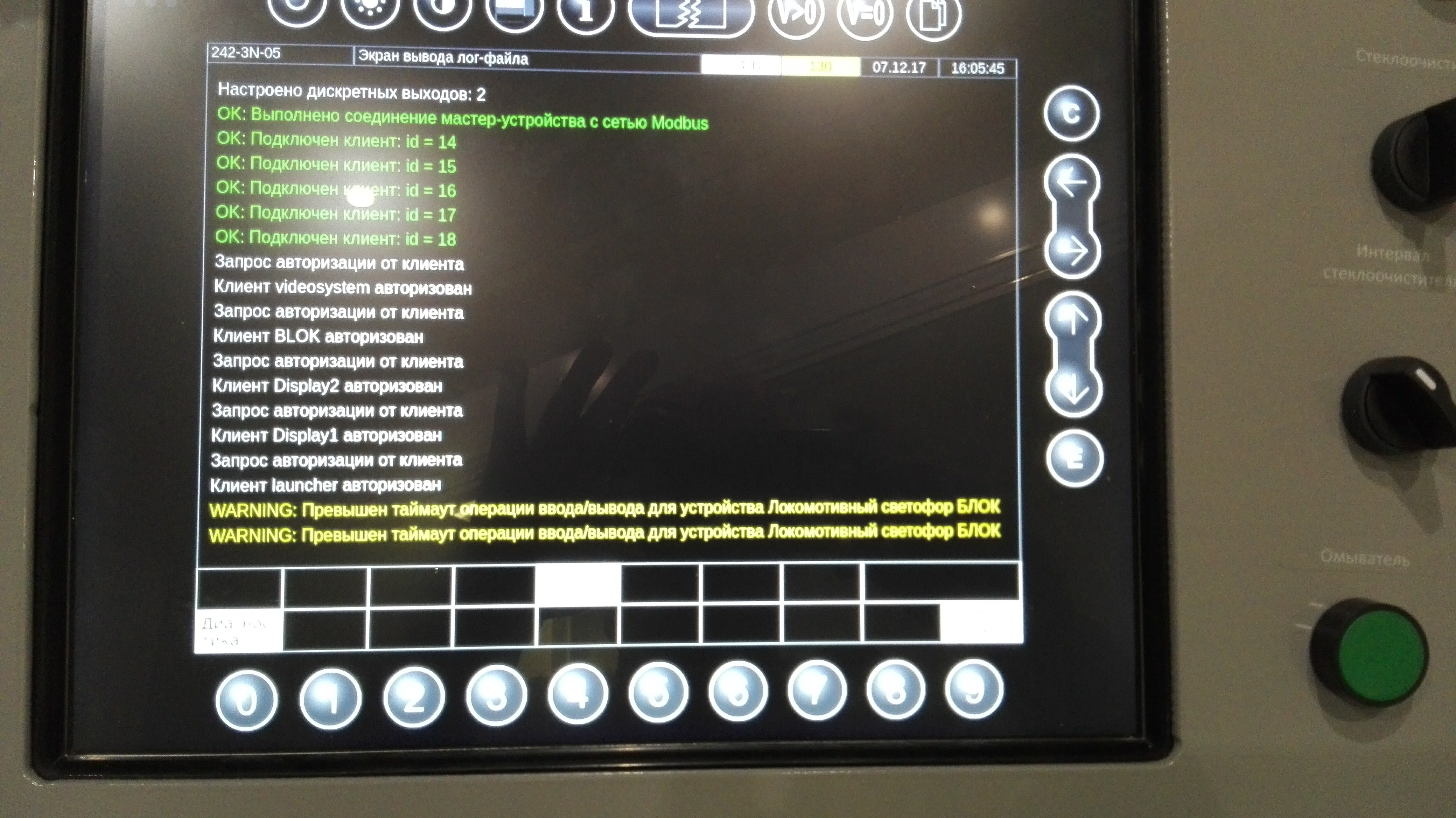
В целом получилось достаточно надежно, а главное удобно для последующего расширения функций. Все электронные блоки системы находятся под неусыпным контролем системы программной диагностики. Сообщения об отказах выдаются максимально человеко-читабельными, с прицелом на раннее обнаружение барахлящего блока
Диагностический экран с журналом текущей сессии работы тренажера
3. Подсистема трехмерной визуализации
При всей мощности в части создания эффекта присутствия, эта часть системы наименее функциональна. Внутри нет никакой «физики», вся «физика» — серверная. Графический клиент вынесен на отдельный компьютер ПК2. От сервера он получает так называемую железнодорожную координату — перемещение вдоль пути в километрах, переводит её в трехмерные координаты камеры и показывает вид из кабины на окружающий пейзаж. На ПК2 установлена обычная NVidia GTX 1060. Видеосистема написана на Unity Personal.
Видеосистема в процессе отладки

Здесь нам ещё предстоит большая работа в плане поиска оптимальной архитектуры, и над этим мы непрерывно работаем. Нюансов тут достаточно, чтобы рассказ о них стал темой отдельного поста.
Заключение
В настоящее время тренажер проходит опытную эксплуатацию и апробацию в учебном процессе в лаборатории высокоскоростного транспорта нашего университета. Надеюсь у меня вышел интересный рассказ, благодарю читавших за проявленное внимание. Извиняюсь за огромное количество тяжелых фоток, ну без этого никак.
(с) Центр развития инновационных компетенций РГУПС
Комментарии (66)

timmi_twice
26.02.2018 06:47А в это время кто-то уже готовит заявку на "покупку" оригинального немецкого тренажёра..

VIPDC
26.02.2018 07:21Потому что немецкий обойдется в 3-5 раз дешевле. А наш будет стоить как «крыло от боинга», но к слову сказать это не вина разработчиков этого безусловно нужного для дорожных технических школ симулятора.
MarazmDed
26.02.2018 09:58Судя по описанию, немецкий выйдет раз в 20-100 дороже нашего. Кстати говоря, если тренажер боинга стоит дороже самого боинга, то это явно не от технологической сложности создания оного. Просто лицензионные отчисления. Потому что могут. А куда вы на хрен денетесь?
lubezniy
27.02.2018 00:29Ну почему не от технологической сложности? Реальному самолёту нет нужды формировать изображения за стёклами пилотской кабины, тратя на это кучу вычислительных ресурсов,
имитировать перегрузки в полёте (куча энергии), иметь инструкторский пульт с заданием параметров учебного полёта, состояния самолёта и т. п. А для тренажёра всё это приходится делать отдельно. И даже одного тренажёра на всю подготовку не хватит.MarazmDed
27.02.2018 00:36Ну почему не от технологической сложности?
Безусловно, тренажер самолета — сложная техническая система. У которой, тем не менее, отсутствуют некоторые важные безумно дорогостоящие механизмы, например, двигатель. Софт тренажера — не на коленке пишется, но с другой стороны, если корректно приплюсовать себестоимость разработки софта, все равно выйдет, что тренажер проще и дешевле самолета. А в реальности тренажер стоит как 10 и более самолетов. Именно потому что без него вы один хрен не обойдетесь. А потому стоимость тренажера складывается из а) монопольного положения производителя б) размера рынка (рынок маленький, следовательно и затраты и прибыль ложатся на плечи малого числа участников).
kolobokspb
26.02.2018 15:03Тренажёр Сапсана стоит приблизительно в ~5 раз дороже российских аналогов. Производство реального тренажёра очень трудоёмкий и долгий процесс. В данной статье рассказывается только про аппаратную часть, но мало кто понимает, что это незначительная часть тренажёра. Фактически нужно воспроизвести систему управления поездом Siemens ЭС1 и ЭС2 до 45 или нашу начиная с поездов ЭС2-45+, систему безопасности КЛУБ/БЛОК. Полноценной документации нет, поэтому приходится мат. модель строить на видео/со слов/привлекать интуицию. Даже РЖД бессильно на предоставление этой информации.
MarazmDed
26.02.2018 10:06Статья очень понравилась. Вопросов два:
1) В видео ролике какая-то беда с фокусировкой. Хочется рассмотреть надписи на экранах/панелях/приборах, а все размыто.
2) А в чем необходимость использования двух ПК? Зачем лишнее звено?
maisvendoo Автор
26.02.2018 10:26+1беда с фокусировкой
беда, оператор оказался неопытным
необходимость использования двух ПК?
Разгрузить тот ПК, на котором считается математика, ибо она там довольно тяжелая: симулируется продольная динамика поезда и взаимодействие колес с рельсами, а это дает довольно тяжелую для счета систему ОДУ.
В то же время Unity в данном примере запускает аж 42 потока на проце. Чего оно там делает одному богу известно, но тем не менее нагрузка на цпу неплохая.
Плюс неохота возится с настройкой множества видеокарт в одном системнике. На ПК1 стоит четырехголовая квадра, на ПК2 gtx 1060. Имеется запас ресурса для расширения функционала.
Два ПК это вообще не предел для подобных системMarazmDed
26.02.2018 10:46Два ПК это вообще не предел для подобных систем
Это понятно, но если есть возможность сделать дешевле, почему не сделать?
Ведь тренажер явно можно запустить в серию. И чем ниже себестоимость, тем больше прибыль.
Разгрузить тот ПК, на котором считается математика, ибо она там довольно тяжелая: симулируется продольная динамика поезда и взаимодействие колес с рельсами, а это дает довольно тяжелую для счета систему ОДУ.
Насколько я понимаю, графика в данном случае — вторична. И сама по себе не должна нагружать сильно систему. К тому же, за отрисовку должен отвечать GPU.
В то же время Unity в данном примере запускает аж 42 потока на проце. Чего оно там делает одному богу известно, но тем не менее нагрузка на цпу неплохая.
А вот это пугает. У вас же все-таки не шутер. А карта большая и реалистичная?maisvendoo Автор
26.02.2018 11:18К тому же, за отрисовку должен отвечать GPU
Должен, но юнити похоже пофигу GTX 570 или GTX 1080 Ti. В чем причина, понять пока не удалось. Та же сцена в Unreal рендерится явно с использованием gpu в полный рост
А карта большая и реалистичная?
Та что на видео — небольшая. Примерно 6-7 кв. километров по площадиMarazmDed
26.02.2018 11:24Спасибо за ответы! Надеюсь, сумеете победить все проблемы и порвете рынок симуляторов! :)
AllexIn
26.02.2018 12:05А почему тогда Unity, а не UE?
maisvendoo Автор
26.02.2018 14:39Мне самому UE нравится больше. Однако, ни тот, ни другой движок не решил пока нашей главной потребности — создания реально больших локаций с возможностью их добавления в симуляцию без пересборки плеера.
AllexIn
26.02.2018 14:46Так. Не понял. в UE локация — umap файл, он в принципе отдельно может поставляться.
Ну а размером через стриминг управлять.maisvendoo Автор
26.02.2018 16:44UE локация — umap файл
после запаковки проекта на каждый umap генерируется ещё uexp и ubulk.
он в принципе отдельно может поставляться
Буду только рад, если меня кнут носом в методикуAllexIn
26.02.2018 16:54Их же отключить можно. Вернее не отключить, а хранить в umap:
[Core.System]
UseSeperateBulkDataFiles=Falsemaisvendoo Автор
27.02.2018 10:03В настройках самого движка эта опция имеет указанную настройку по-умолчанию и так. Тем не менее uexp и ubulk генерятся всё равно. Установка этой опции в Config/DefaultEngine.ini самого проекта так же не дает эффекта
maisvendoo Автор
27.02.2018 13:39Беда решилась, убрал генерацию uexp и ubulk
Настройки стиминга в UE4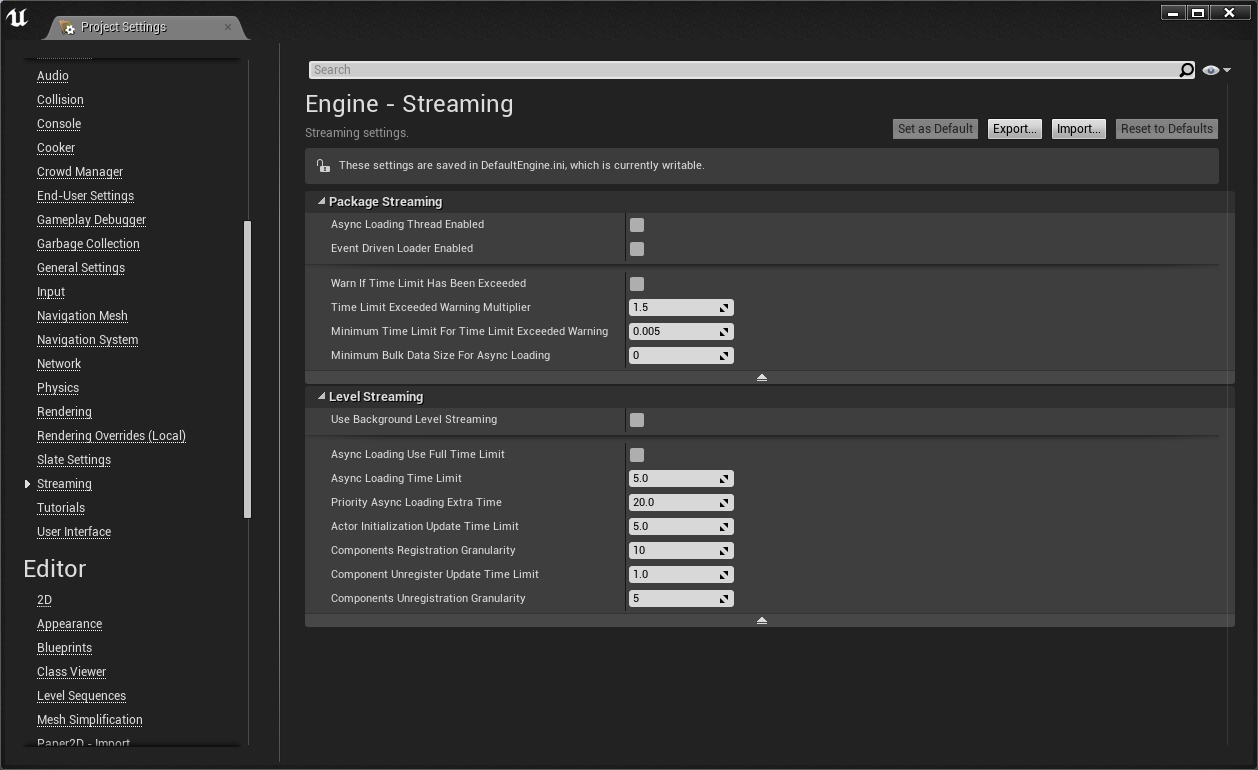

seri0shka
26.02.2018 15:38А нельзя ли для отображения вида из кабины использовать реальное видео? Из переменных только время отображения кадра, точка обзора не меняется. Видеосистему это разгрузило бы полностью. Кстати, может кто сказать- используется ли где-либо подобное решение?
maisvendoo Автор
26.02.2018 16:42А нельзя ли для отображения вида из кабины использовать реальное видео?
Это уже проходили. От этого отказываются повсеместно. Как видео снятое на 60 км/ч проигрывать при движении на 5 км/ч? Как ехать назад? И куда побегут при этом бежавшие по перрону собаки?
Раньше такое использовалось, причем везде. Теперь нет
kolobokspb
26.02.2018 14:37Ведь тренажер явно можно запустить в серию
Нет таких потребностей.MarazmDed
26.02.2018 19:36Нет таких потребностей.
Железнодорожников по России раз-два и обчелся?
Если поискать хорошенько, думаю, что потребности найти можно.
Интересный пример для размышления: letchikleha.livejournal.com/134129.html
Энтузиасты создали тренажеры на b737 и airbus a320. Теперь в Москве есть возможность у дилетантов порулить настоящим самолетом. Стоит это удовольствие около 5000руб за 30мин. Как я понимаю, затраты окупаются.
Почему бы не запустить подобный пример и с железными дорогами? Учитывая, что на ютюбе есть любители, которые запилили 12ч поездку на симуляторе поезда без купюр, может пользоваться спросом.AllexIn
26.02.2018 21:39О. Я давненько разрабатывал проект такой штуки для кабины Меха из Battle tech. Бросил это дело, потому что зарабатывать на этом не хотелось, а для себя развлечение какое-то больно дорогое выходило. :)
MarazmDed
26.02.2018 21:48Зарабатывать на этом или нет — дело вкуса. Но, почему-то, идея воспринимается как нечто ругательное. Может потому уровень жизни не фонтан? Идеи есть, а довести до коммерческого успеха — считается постыдным?
Einherjar
26.02.2018 22:05Стоит это удовольствие около 5000руб за 30мин. Как я понимаю, затраты окупаются.
Да уж… в дефолт-сити-2 За 5 т.р. можно 30 минут на по настоящему настоящем самолете полетать, т.е. в том плане что в воздухе. Конечно там мягко скажем далеко не боинг, но гарантированно лучше каких то эмуляций.MarazmDed
26.02.2018 22:18На вкус и цвет все фломастеры разные. Я бы так категорично не утверждал, что хуже, а что лучше. За 5т.р. можно и на реальном боинге полетать. И не 30мин, а 1ч 40мин. От дефолт сити, до ебурга, например. Одна разница: не в кабине пилотов и не за штурвалом.
Сильно сомневаюсь, что за 5 тыр дадут порулить хотябы сверхлегким самолетиком. Пассажиром — да. Но все же кому что. Я, скорее всего, не пожалел бы 5тыр за 30мин полета на симуляторе.
kolobokspb
27.02.2018 12:19Это ваши фантазии, а есть реальная жизнь. Я своими руками собрал пять таких тренажёров: ЭС1 (Адлер, Москва, СПб, ПВЛК), ЭС2-Г (Москва). Эксплуатация этих тренажёров идёт в штатном режиме в обучающих и выставочных центрах. Все выставочные образцы не приносят прибыли. Возможно, что на самолёт можно привлечь народ, но не на покатушки на электропоезде.
kolobokspb
26.02.2018 15:16Это понятно, но если есть возможность сделать дешевле, почему не сделать?
Это штучное изделие. Стоимость ПК незначительна в общей стоимости изделия.Насколько я понимаю, графика в данном случае — вторична.
Это не так. Точнее она специфична. По данному видео не разобрать, но к рельсовым тренажёрам есть критерии читаемости знаков/литер/пикетов/светофоров с большого расстояния.А карта большая и реалистичная?
Из этого видео я так и не смог разобрать, что это за однопутный участок дороги, но в среднем для обучения используются трассы 40-100км
shadO2f
26.02.2018 11:51Классика построения тренажеров это: 1 ПК — 1 подсистема. Если у нас отказ одной подсистемы, то тренажёр в целом функционален и может работать далее.
Обычно тренажёры строятся на работу не менее 12и часов в сутки и 7 дней в неделю, иначе их стоимость не окупается.kolobokspb
26.02.2018 15:29Классика построения тренажеров это: 1 ПК — 1 подсистема.
Это не так. Всё зависит от поставленной задачи. В рельсовых тренажёрах я бы на визуализацию не стал вешать доп. процессы т.к. возможны микрофризы и это будет видно пользователю особенно, когда в unity gc срабатывает.Обычно тренажёры строятся на работу не менее 12и часов в сутки и 7 дней в неделю, иначе их стоимость не окупается.
Это не так. Центры обучения работают с 9-16 с наличием выходных. Возможно, что существуют специфичные центры обучения, но в России таких нет.
Einherjar
26.02.2018 10:47Занятно что в РФ больше одного проекта тренажеров на один и тот же поезд. Видимо мелкосерийное производство нецелесообразно.
x3mality16
26.02.2018 10:50Работают эти модуль под управлением Windows XP Embedded (да-да, представьте себе!).
модулИ :)
Вроде уже кое-где 7-ку применяют, не?maisvendoo Автор
26.02.2018 11:15кое-где 7-ку применяют, не?
семерка эмбеддед? Не слышал
Про дисплеи «Ласточки» говорю, потому что знаю совершенно точно — там XP embeddedx3mality16
26.02.2018 12:01Загуглил жизненный цикл поддержки Embedded — оказывается они продлили до 2019 года, тогда вопросов нет
parakhod
26.02.2018 11:13Четыре года назад я работал с одной итальянской компанией, которые делает автомобильные симуляторы для автошкол — я разрабатывал платы контроллеров для сопряжения реальных органов управления и индикаторов с симулятором.
Так вот самым интересным проектом был симулятор грузовика Iveco Eurocargo, который делали совместно с французами. Там не то что все органы управления были оригинальными — использовалась настоящая кабина грузовика. Она стояла на платформе, позволяющей раскачивать её в разных направлениях (только за это два компа отвечали), изображение проецировалось на шесть экранов вокруг. Даже пневмосистемы работали.
Эффект присутствия был потрясающим, конечно.
Bedal
26.02.2018 12:43даже в авиации признают, что подобные системы реальности — не нужны. Не повышают они качество тренировок. Другое дело, что отказаться тяжело — чиновнику/менеджеру поставить подпись под отказом от такой красивой и реалистичной штучки крайне сложно. Ну и плюс — это же совсем другие деньги, стоимость повышается вдесятеро — а, значит, повышается и солидность всех вовлечённых.

voyager-1
26.02.2018 13:11Тут ещё такой фактор что упрощение симулятора могут расценить как попытку сэкономить на безопасности пассажиров (ведь если пилот переучивается с одной модели самолёта на другую — его после тренировок сразу сажают за штурвал самолёта с пассажирами, ни одна фирма не станет гонять самолёт порожняком и жечь топливо только чтобы «дообучить» пилота).
Да и использовать такой дорогой тренажёр наверняка всё равно дешевле чем реальный самолёт, а пожалуй единственное такой тренажёр отличает от реальности — это то что на нём нельзя сделать «бочку» или «мёртвую петлю» что для коммерческих самолётов не актуально, а для продукции Airbas — из-за ограничений её fly-by-wire в принципе невозможно.Bedal
26.02.2018 17:08Речь именно о системах подвижности и эмуляции перегрузок. Совершенно бесполезно для конечного результата, стоит раз в десять дороже всего остального — но никакой возможности отменить несуразность. Именно по указанной Вами причине — «вдруг что случится, а мне потом объяснять, почему я отказался от этой системы». Плюс — всем менеджерам и чиновникам _выгодны_ денежные потоки побольше.
MarazmDed
26.02.2018 18:44Пример: самый массовый самолет в России — Boeing 737. Тренажеры на них есть в Париже. Вопрос: какой профит российским чиновникам или менеджерам авиакомпании, чтобы гонять пилотов учиться за бугор? Какие именно денежные потоки пройдут мимо их карманов?
«Совершенно бесполезно» — ой сомневаюсь. Одна из задач тренажеров (а может важнейшая из задач?) довести до автоматизма действия пилотов в аварийных ситуациях. Например, отказ обоих двигателей. Это — тяжелая ситуация, но не смертельная, пилоты имеют возможность посадить такой самолет. В реальных полетах вы такое в принципе потренировать не сможете, а эффект присутствия сильно размывает разницу с реальностью. Когда у вас и перегрузки и вы можете лоб расшибить, если не пристегнетесь, подсознание не будет подавать сигналов «успокойся, ты в тренажере». У вас есть доказательства, что это «совершенно бесполезно»? Ссылки на научные публикации какие-нибудь?polus
27.02.2018 06:51A320F — самый популярный тип вс в России. В остальном согласен. Визуализация и имитации ускорений размывают границы между реальным самолетом и тренажерами.
Bedal
27.02.2018 09:42Извините, но у вас что-то бессодержательное. Вот, к примеру, то, что по памяти нашлось: psycnet.apa.org/buy/1993-15732-001
Вот посвежее, о гражданских: arc.aiaa.org/doi/abs/10.2514/6.2005-6109
А случай, когда едут куда-то вообще не про то. Речь о том, какие тренажёры заказывают те, кто их заказывает. И почему именно такие.
Сын у меня за время работы над авиационными тренажёрами университет аэронавтики эмбри-риддла закончил и в сути вопроса разбирается. Так что не надо из общих соображений возмущение извлекать.MarazmDed
27.02.2018 11:10Вот, к примеру, то, что по памяти нашлось: psycnet.apa.org/buy/1993-15732-001
Вот посвежее, о гражданских: arc.aiaa.org/doi/abs/10.2514/6.2005-6109
Честно говоря, удивлен результатами. При чем, видимо, не только я. Судя по цитированию статей разгорелась дискуссия по вопросу. И там же есть статьи, где доказывается, что 6-pod motion очень нужная и полезная штука.
Так что не надо из общих соображений возмущение извлекать.
Вы не так поняли, не возмущение — удивление.Bedal
27.02.2018 11:50Извините за горячность. Но читали, наверно, что я выше писал про отличие тренажера от симулятора? Для авиационных это тоже верно. Если пилот управляет крупным современным самолётом, тем же «арбузом» или «бобиком», ориентируясь на «жопой чую» — не миновать беды. Даже на лёгких аппаратах лётчиков бьют и наказывают за пилотаж по ощущениям, а не приборам.
Подробнее по ссылкам написано, ну и в бумажных книгах-учебниках из того самого университета, которые сын давал мне почитать (я тоже авиации не чужд).
И — да — тренировка пилота состоит в правильном соблюдении и исполнении разнообразных процедур. В которые ощущение крена (почти всегда ложное, кстати) не входит. Защитники систем подвижности — обычно консерваторы, которые объективных показателей к их сохранению предъявить не могут.MarazmDed
27.02.2018 11:57Если пилот управляет крупным современным самолётом, тем же «арбузом» или «бобиком», ориентируясь на «жопой чую» — не миновать беды.
И — да — тренировка пилота состоит в правильном соблюдении и исполнении разнообразных процедур. В которые ощущение крена (почти всегда ложное, кстати) не входит.
Да, это весомый аргумент. Это действительно объясняет, почему 6-pod motion может быть лишним. В Казани, как раз по этой причине «жопой чую» уронили самолет. Да и Ан-148, похоже, из этой же серии.Bedal
27.02.2018 15:19Да сплошь и рядом CFIT (Controlled flight into terrain) имеет причиной именно то, что пилоты начинают рулить «по ощущениям», потеряв доверие или запутавшись в показаниях приборов. И недавняя катастрофа Ан-148 ровно из этой области. Им не хватило именно тренировок на процедуры. Которые есть, в том числе на отказ всех трёх приёмников давления.
parakhod
26.02.2018 15:56Ну именно этих систем было сделано всего три. Причём на весь ЕС )). Они размещаются на мобильной платформе — на базе раскладывающегося трейлера и при необходимости их можно быстро перевозить. Две установки сейчас в Марселе живут, одна у нас в Палермо.
Насколько я знаю финансирование на этот проект выделялось не государственное (хотя по каким-то программам он проходил, но там скорее списания по налогам были, а не прямая поддержка). И непосредственно Iveco тоже участвовал, первый раз в моей практике я получил реальную документацию со всеми протоколами на приборный кластер и не надо было заниматься reverse-engineering'ом.
А так, основная продукция этой компании — это небольшие симуляторы, одно кресло и два-три экрана, реальная приборная панель от машины (Fiat/VW/Daewoo), руль, педали. Руль с фидбеком (тоже я делал) ставим только на самых дорогих вариантах, проектирование педалей с фидбеком вообще забросили.
Но зато получается очень недорого и замечательно расходится по автошколам по всей Италии — а в прошлом году сделали ещё локализацию софтины на французский, там тоже спрос возник, и сейчас будем локализовывать на арабский (оказывается весь Магриб тоже готов покупать такие штуки)
Bedal
26.02.2018 11:33Разгрузить тот ПК, на котором считается математика, ибо она там довольно тяжелая: симулируется продольная динамика поезда и взаимодействие колес с рельсами, а это дает довольно тяжелую для счета систему ОДУ
ой, а как у нас под гнилыми виндами модель энергосистемы и в быстрой, и в медленной динамике живёт? И всё это вполне крутится на ноуте с одним гигом памяти. И написано не на крутых плюсах, а на шарпе (включая расчётный модуль).
Но ладно, понудил, и хватит. Лучше дам полезный совет: то, что описывается — не тренажёр, а симулятор. Все усилия — на симуляцию реального поведения железки. Но, если вы действительно исследуете работу машиниста, увидите, что 90% его работы не в том, на симуляцию чего вы тратите столько сил и умений. Сделав обеспечение хотя бы трети из этого, остального, вы сделаете именно тренажёр, и тренажёр ценный.
Хотя в качестве студенческой работы моё предложение не годится, это нудная громоздкая работа.maisvendoo Автор
26.02.2018 12:04не тренажёр, а симулятор.
Да, это симуляторBedal
26.02.2018 13:57вообще было приятно прочесть, спасибо. Приятно встретить коллегу — сам уже больше 20 лет тренажерами диспетчеров энергосистем занимаюсь, и сын занимался самолётными.
seregvan
26.02.2018 11:52Интересная статья) Сам несколько лет назад участвовал в разработке тренажера для этого же поезда, только в другой компании) Возникли замечания/вопросы:
1. Странно, но по видео видно, что у вас нет радиостанций. Почему? Они ведь активно используются для связи машинистов, это тоже необходимо тренировать.
2. Не увидел панелей управления, которые в поезде находятся за машинистом (там, где противопожарная система, если не изменяет память).
3. Есть ли возможность у машиниста управлять различными тумблерами и внешними приборами, которые находятся вне кабины?
4. Есть ли АРМ инструктора? Можно ли менять погодные условия, задавать различные неисправности? Ведь в этом основная задача тренажера — тренировать в машинистах реакцию на нештатные ситуации, которые в реальной жизни сложно/дорого/почти невозможно воспроизвести.maisvendoo Автор
26.02.2018 12:13вас нет радиостанций.
Будет, пока что не поставили. Но необходимость в ней имеется
На счет остальных моментов, тут надо понимать специфику. Это не тренажер машиниста, а лабораторный комплекс для изучения электропоезда и ориентирован он на подготовку инженеров проектировщиков и эксплуатационников. Как сказал комментатор выше, это скорее симулятор и он в общем-то прав
lingvo
26.02.2018 13:25Сколько человеко/часов потратили на разработку симулятора? Сколько стоило оборудование?
ТЗ на симулятор было реально согласовано с разработчиком электропоезда, сам симулятор ими опробован?
maisvendoo Автор
26.02.2018 13:50Сколько стоило оборудование?
Себестоимость и прочие финансы озвучивать не буду, внутренняя информация
Сколько человеко/часов
Около 7000
ТЗ на симулятор было реально согласовано с разработчиком электропоезда
Разработчик за границей, ему дела нашего образования не сильно близки
сам симулятор ими опробован?
В сименсе, вернее в его российских подразделениях, работают наши выпускники. Они оценили нашу работу положительно. Такую же оценку получили от машинистов, работающих с реальной машиной на СКЖДlingvo
26.02.2018 14:14Разработчик за границей, ему дела нашего образования не сильно близки
Вопрос был с точки зрения того, насколько симулятор соответствует реальному поезду.
Около 7000
Можете разбить это на части — сколько ушло на ПО, сколько на устройство сопряжения, доработку манометров, джойстиков? Это были отдельные проекты? Это все было сделано студентами, или преподавательским составом?
maisvendoo Автор
26.02.2018 14:23Это все было сделано студентами, или преподавательским составом?
Основная масса разработчиков — наши учащиеся: студенты, магистранты и аспиранты. Я сам совмещаю должность тимлида разработчиков ПО верхнего уровня с должностью доцента кафедры «Электрический подвижной состав». Тимлид электронщиков тоже преподает на профильной кафедре.
Можете разбить это на части
На ПО ушла половина этих трудозатрат. Остальное поделилось между электронной аппаратурой, механикой и конструктивом пульта и кабины, но по железу я учета не вел, могу сказать лишь примерно
lingvo
26.02.2018 16:31Основная масса разработчиков — наши учащиеся: студенты, магистранты и аспиранты.
Т.е. должны быть курсовые, дипломные и магистерские работы на основе этого симулятора. Они в открытом доступе?
Остальное поделилось между электронной аппаратурой, механикой и конструктивом пульта и кабины, но по железу я учета не вел, могу сказать лишь примерно
Т.е. 3500 на все про все — 2,5 студентагода. Я бы сказал, что многовато. Как бывший студент и разработчик стендов в настоящем могу сказать, что в качестве аппаратной части симулятора могли бы взять что-то промышленное на основе ПЛК и не заниматься своим творчеством. Сэкономили бы немного денег и получили бы действительно расширяемость и задел на будущее. А то студенты уйдут и кто будет помнить, как это все работает?
AllexIn
26.02.2018 16:59кто будет помнить, как это все работает?
документация?lingvo
26.02.2018 17:00документация?
От студентов 8-/ ?
AllexIn
26.02.2018 17:04Безусловно. За приему работы от студента без оформленной документации — вообще преподов по рукам бить надо.
lingvo
26.02.2018 21:35Да я знаю. Но мы все знаем, как это реально происходит — ночь перед здачей, а курсач не готов. При этом симулятор вот же, стоит во-плоти, и студент и препод знают, сколько времени и пота было на него потрачено и у препода просто не поднимается рука поставить плохую оценку отличному студенту за хорошую работу…
В то время, как другие сдают курсачи на бумаге…
maisvendoo Автор
26.02.2018 18:45От студентов 8-/ ?
Воспитываем. Есть и документация, и Doxygen и версионный контроль. Иначе никак
дипломные и магистерские работы на основе этого симулятора
Два моих ведущих разработчика в этом году заканчивают магистратуру. Темы работ по «Ласточке»

LeonidZ
Очень интересно, спасибо!
P.S. Музыка в промо… в общем, лучше бы ее там вообще не было