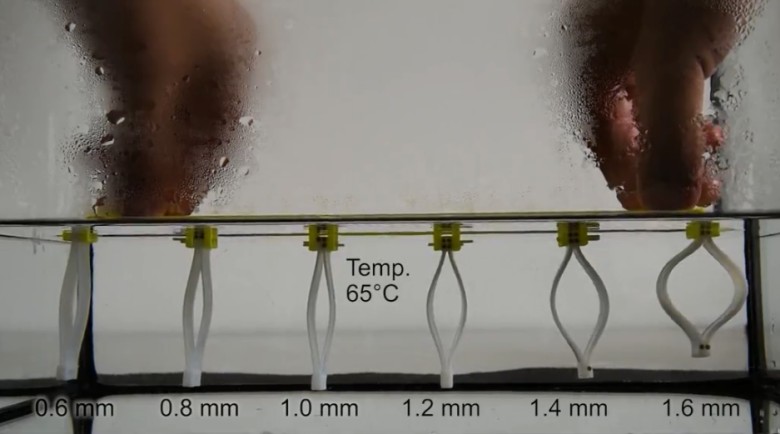
Реакция полос гибкого полимера на изменение температуры зависит от их толщины. Здесь показаны полосы от 0,6 мм до 1,6 мм при помещении в воду 65°С. Скорость выпрямления варьируется от 7 до 37 секунд, что позволяет программировать действия робота в определённой последовательности
Инженеры Калифорнийского технологического института с коллегами из Швейцарской высшей технической школы Цюриха создали роботов, способных самостоятельно двигаться без использования каких-либо двигателей, сервоприводов или источника питания. Похоже на вечный двигатель? Не совсем. Дело в том, что каждая пара вёсел или «мышц» способна только на одно движение вёслами после того, как робота опустят в воду. Но изюминка в том, что мышц и вёсел может быть сколько угодно — и они могут срабатывать через разные промежутки времени друг за другом. Таким образом можно заранее программировать траекторию движения робота, а также выполнение им различных действий — например, сброс груза с последующим манёвром уклонения. Научная работа финансировалась научно-исследовательским подразделением армии США (Army Research Office).
Несмотря на кажущуюся простоту, это первые в своём роде устройства, которые для запрограммированных действий в воде используют деформацию материала при изменении температуры. Принцип работы показан в демонстрационных видеороликах.
Список демонстрационных видеооликов
- Один гребок. Пройденное расстояние от одного гребка примерно соответствует 1,15 длины робота.
- Реакция «мышц» на изменение температуры зависит от толщины полос гибкого полимера. На видео показаны полосы толщиной от 0,6 мм до 1,6 мм при помещении в воду 65°С. Скорость выпрямления варьируется от 7 до 37 секунд.
- Движение робота-гребца с двумя парами вёсел. Последовательность гребков регулируется толщиной мышц на первой и второй парах вёсел. Пройденное расстояние от двойного гребка примерно соответствует 1,9 длины робота.
- Движение с левым поворотом. Первая пара вёсел передвигает робота вперёд примерно на 0,5 его корпуса, а весло из второй очереди поворачивает корпус примерно на 21,45°.
- Движение с двумя поворотами. После первого гребка робот поворачивает налево примерно на 21,64°, а после второго гребка поворачивает направо примерно на 21,45°.
- Мускулы из другого материала, которые расправляются при другой температуре 40°С. На видео показано, что предыдущий материал не реагирует на такую температуру. Таким образом, учёные могут программировать робота на различные движения в зависимости от температуры окружающей среды.
- Пример сложного алгоритма. Робот проплывает установленное расстояние, сбрасывает груз, а затем уплывает в обратном направлении. Первое условие обеспечивается более тонкими полосами полимера, которые срабатывают раньше. Крепление груза обеспечивается толстыми полосами, которые реагируют позже и выпускают груз после того, как робот проплыл запрограммированное расстояние.
- Внутренний механизм актуатора показывает, как мышца давит и переводит бистабильный механизм из одного равновесного состояния в другое.
По мнению разработчиков, это исследование в каком-то смысле «стирает границу между материалами и роботами», поскольку в устройстве сам материал выполняет функцию машины: «Наши примеры показывают, что мы можем использовать структурированные материалы, которые деформируются в ответ на экологические сигналы, для управления и движения роботов, — говорит Чайра Дарайо (Chiara Daraio), профессор машиностроения и прикладной физики в отделе инженерных и прикладных наук Калифорнийского технологического института, один из авторов научной статьи.
Робот приводится в движение полосами гибкого полимера, который сжимается при холоде и растягивается при нагревании. Полимер расположен так, чтобы активировать бистабильный переключатель в корпусе робота, который в свою очередь прикреплён к подвижному элементу, например, к веслу для гребка вперёд.
Исследование опирается на предыдущую научную работу по цепям бистабильных элементов для передачи сигналов и конструирования логических вентилей программируемой машины.
Кроме температуры, робот может программироваться на выполнение действий в зависимости от других условий — например, срабатывать на изменение кислотности среды.
Научная статья опубликована 15 мая 2018 года в журнале Proceedings of the National Academy of Sciences of the United States of America (doi: 10.1073/pnas.1800386115, pdf).
Комментарии (10)

notabesttime
17.05.2018 08:41+1Несмотря на кажущуюся простоту, это первые в своём роде устройства, которые для запрограммированных действий в воде используют деформацию материала при изменении температуры.
А мины как же раньше всплывали? Кусочек сахара или соли, чем не устройство делающее запрограммированное действие (таймер в зависимости от размера и температуры воды) в воде использую деформацию материала (вплоть до изменения агрегатного состояния) под дейстивем температуры.
Не поленился зарегистрироваться, надеюсь коментарий пройдет, ради борьбы с глупостью.
Kanut79
17.05.2018 11:01А почему "без двигателя"? Двигатель это, если я совсем не ошибаюсь, устройство преобразующее энергию в работу. Где сказано что он не может быть "одноразовым"? Получается этот робот имеет не один, а много двигателей :)
Ulkomaalainen
17.05.2018 18:20Это лишь эксперименты. Зато существуют реальные устройства без двигателя, которые активно используются для океанических исследований и военными. Подводные планеры меняют плавучесть за счёт градиента температур в океане и преобразуют вертикальное движение в горизонтальное за счёт наличия крыльев.
Тут подробнее описано, как работает Slocum Glider: www.defenseindustrydaily.com/underwater-gliders-for-the-us-navy-06990
Энергия батареи нужна только для управления, работы аппаратуры и передатчика.
Вики: en.wikipedia.org/wiki/Underwater_glider
USBLexus
Можно сделать умные антациды в капсулах
BubaVV
Которые гребут ластами по градиенту рН
USBLexus
Дозируют лекарство в зависимости от кислотности желудочного сока. Если кислотность нормальная, а человек выпил антацид потому что от изжоги доктор выписал или рекламу по телевизору посмотрел, то капсула тупо выходит естественным путем. Если повышена несильно, дозирует наполовину, если сильно, полная доза. Сразу снизит количество «хроников» в разы