

Заключающая статья серии, посвященной автоматизированным способам настройки ПИД-регуляторов в среде Simulink, в которой мы рассмотрим применение блока автоматической настройки Closed-Loop PID Autotuner.
Этот блок похож на ранее рассмотренный инструмент Frequency Response Based PID Tuner: он также базируется на методе гармонического анализа. Располагается блок в разделе Simulink Control Design библиотеки Simulink.
Сразу стоит сказать, что система аналогична приведенной в предыдущей статье, поэтому все результаты моделирования можно посмотреть там же.
Модель системы
Рассматриваемая система приведена ниже.

Содержимое всех подсистем, кроме подсистемы регулятора, было рассмотрено в предыдущих статьях: Driver, Electric actuator, Load.
Для того чтобы использовать блок Closed-Loop PID Autotuner, необходимо включить его последовательно с блоком PID Controller, как показано ниже.
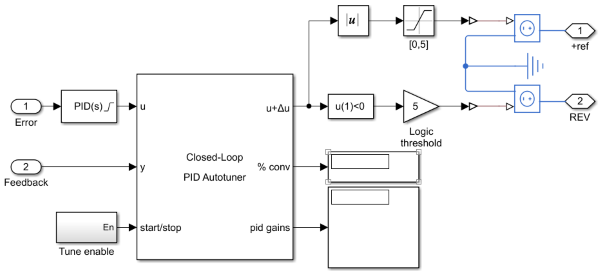
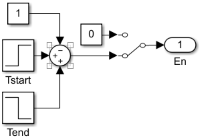
На порт входа 1 приходит сигнал ошибки с дискриминатора, на порт 2 — сигнал обратной связи; в данном случае угловая скорость объекта управления. В подсистеме Tune enable формируется сигнал начала и завершения эксперимента по настройке параметров регулятора.
В модель добавлены блоки Display для регистрации выполнения эксперимента в процентах
(% conv) и подобранных параметров регулятора (pid gains).
Предъявим к этой системе такие же требования, как к системе из предыдущей статьи.
Настраиваем контроллер
Окно параметров блока Closed-Loop PID Autotune позволяет выбрать тип используемого в системе регулятора, его форму, задавать цель эксперимента, а также его параметры.

Желаемое значение полосы пропускания (Target bandwidth) рассчитывается также, как в предыдущей статье. В нашем случае оно равно 4.83 рад/c.
Если используемый в системе регулятор цифрового типа, то в блоке автонастройки указывается его период квантования; при применении непрерывного регулятора задается шаг расчета модели при выполнении эксперимента (Experiment sample time). Рекомендуемое значение шага моделирования составляет . В нашем случае это значение равно 0.0041.
Во вкладке Experiment задаются параметры эксперимента. Рассматриваемая система является устойчивой, поэтому тип системы (Plant Type) указываем как Stable. Знак системы (Plant Sign) указывает на свойство совпадения знака выходной и входной координат. В данном случае оставляем этот параметр без изменения. Далее указывается амплитуда тестового гармонического сигнала (Sine Amplitudes) в соответствии с рекомендациями, приведенными в предыдущем параграфе. Устанавливаем амплитуду, равную 1.
Время начала эксперимента выбирается из расчета перехода системы в установившийся режим без регулятора. Время завершения эксперимента рекомендуется рассчитывать по формуле . Для нашей системы время начало эксперимента будет с, а время завершения с. Оба значения указываются в полях Step time соответствующих блоков Step в подсистеме Tune enable.
Следует отметить, что время завершения моделирования (Stop Time) необходимо указывать больше, чем время окончания эксперимента, иначе процесс настройки параметров регулятора не завершится.
После расчета модели подобранные параметры отобразятся в блоке Display.

Эти значения придется записать в соответствующие поля блока PID Controller вручную.
Для нормального функционирования системы переводим тумблер Manual Switch в подсистеме Tune Enable на вход нулевого сигнала. Таким образом, блок автонастройки не включится при моделировании системы.
Можно заметить, что рассчитанные параметры с помощью блока Closed-Loop PID Autotune практически совпадают с параметрами, полученными с помощью инструмента Frequency Response Based PID Tuner.
ProLimit
Реализовывал нечто похожее на чистом C и в железе, а не на моделях. Основная проблема, с которой сталкиваешься — как получить отклик Plant в Closed-loop системе? Работающий ПИД очень эффективно «съедает» тестовый сигнал в низкочастотной области, так что околонулевое отношение сигнал/шум практически не дает представления о поведении системы на низких частотах. Интересно как с этим справились разработчики этого модуля Симулинк? Или в случае моделирования, шум нас вообще не волнует?