
Появившись в далёких восьмидесятых годах, фильм «Назад в будущее» до сих пор бередит сердца своих поклонников одной легендарной сценой, где Марти МакФлай легко надевает футуристичную обувь с автоматической затяжкой. С тех пор сформировалась целая армия поклонников такого решения, в которой кто-то просто с нетерпением ждёт наступления такого светлого будущего, а кто-то с инженерными знаниями пытается смастерить такое самостоятельно.
Не остаются в стороне и компании — например, компания Nike, чья самошнурующаяся обувь и появилась в фильме, в 2016 году выпустила ограниченную партию из 89 кроссовок, полностью копирующих внешний вид кроссовок из фильма. Кроссовки распространялись только через аукцион, входной билет на который стоил 10 долларов («ха-ха» скажут инженеры и программисты, «я такое соберу за 5 долларов» — и будут правы).
Тем не менее, факт остаётся фактом — после появления этой идеи в зоне внимания самодельщиков количество попыток собрать такое с течением времени не уменьшается.
Однако нельзя сказать, что и другие компании оставили такой тренд в стороне, так как они выпустили как минимум две модели кроссовок, которые, конечно, отличаются от модели из фильма, но, тем не менее, обладают схожим функционалом:
Отметилась на этом поприще и компания Puma, выпустившая свою аналогичную модель:
Причина того, почему я вообще заинтересовался этим вопросом, заключается в том, что я сам являюсь многолетним пользователем защёлок, похожих на пряжку, которая позволяет достаточно легко и быстро «застёгивать» шнурки вместо их завязывания:

Такие защёлки я распечатал себе на своём 3D принтере практически в самом начале, сразу после его покупки в 2017 году.
Несмотря на то, что внутренняя лень мне говорила «да зачем тебе это надо, завязывай шнурки как обычно, опять ерунду какую-то придумал», я не поленился и всё-таки изготовил такие защёлки, о чём не пожалел ни разу с того момента!
Мало того, я так за годы «подсел» на это удобство, что сейчас уже мало представляю себе обувь, которую надо завязывать, для меня это сейчас как какой-то прошлый век! И такими защёлками снабжаю практически всю свою обувь, варьируя только цвет. Да, можно купить на aliexpress нечто подобное, но для самодельщика лучший подарок — " это сделанный своими руками" :-)
И, некоторое время назад, примерно с пару месяцев, я задумался о переходе на следующий уровень, тем более что все возможности позволяют это сделать, а именно: поменять обычные защёлки на автоматически затягиваемые шнурки. И внизу будет некоторый анализ ситуации и наработки, которые позволят вам двигаться в таком же направлении, если эта идея вас «зацепит».
Анализ ситуации
▍ Уточнение задач
Итак, для начала попробуем обрисовать круг проблем, с которыми нам придётся иметь дело, после чего уже можно приступить к их решению.
Так как современный уровень развития электроники и программной части позволяет решить этот вопрос достаточно легко, начнём с более тяжёлой части — собственно самого механического устройства, которое и будет затягивать шнурки, а уже в финале рассмотрим, как нам обустроить и электронно-программную часть.
Механическая часть устройства должна обладать тремя неотъемлемыми качествами:
- достаточной мощностью, чтобы натянуть шнурок;
- после натяжения шнурка способностью удерживать его в таком состоянии;
- энергоэффективностью как в процессе натяжения шнурка, так и в процессе его удержания (иначе нам на каждый ботинок придётся вешать чемодан батареек, чего не хотелось бы :-D ).
▍ Привод
Посмотрим, какие из доступных технических решений могут обеспечить соответствие перечисленным выше требованиям…
В первую очередь, вспоминая достаточно мощные и компактные приводы, в голову приходит известный маленький электродвигатель с металлическим редуктором, так называемый N20, который в зависимости от редуктора может иметь тягу в 3 кг и даже более, несмотря на свои более чем компактные размеры (ниже показан на фоне мизинца для масштаба):

А металлический редуктор, достаточно точно изготовленный, обеспечит его долговечную работу и мощную тягу.
Минусом такого двигателя является его неспособность фиксироваться в определённых положениях. Да, это можно обойти, если установить на вал энкодер и датчик, однако это всё сложно (но вполне реально), поэтому посмотрим, какие ещё есть варианты… В качестве добавки: существуют такие же двигатели, но с уже установленным энкодером (расположен с противоположной валу стороны). Возможно, для кого-то это будет интересно — не для этой самоделки, а вообще:

В качестве следующего варианта просто просится использование весьма логичного в таких случаях варианта: шаговый двигатель.
На первый взгляд, одни только плюсы: фиксация в определённых положениях, достаточная мощность, возможность точного контроля вращения (а если стандартной точности недостаточно, то с использованием микрошагового режима).
Тем не менее, у такого двигателя есть существенный минус: он постоянно будет тратить энергию, работая в режиме удержания, то есть будучи зафиксированным в каком-либо дискретном положении, что не есть хорошо.
На некоторых больших ЧПУ-станках для решения этой проблемы применяется так называемый «тормоз» на валу, а сами шаговые двигатели такого типа называют «шаговый двигатель с тормозом». Такое устройство позволяет удерживать вал шагового двигателя зафиксированным в определённом положении при отсутствии питающего напряжения, если нужно его удерживать относительно продолжительное время. Тем не менее, маленьких шаговых двигателей такого типа мне не известно, поэтому этот вариант для нас тоже не подходит.
Следующей альтернативой является сервопривод, который выгодно отличается от шагового двигателя тем, что он тратит энергию только пропорционально нагрузке на валу, пытаясь удержать вал в требуемом положении.
На мой взгляд, такое решение является достаточно элегантным с технической точки зрения, так как позволяет любому желающему изготовить самозатягивающееся устройство для своей обуви с минимальными трудами.
Для этого нужно всего лишь взять сервопривод постоянного вращения, например, такой, подключить его к микроконтроллеру и установить некие кнопки для управления, вот и всё! И примеры подобных устройств даже известны, они выглядят и работают достаточно неплохо (на первый взгляд):
Тем не менее, здесь всё так же не решена проблема энергоэффективности, так как не хотелось бы заботиться постоянно о заряде батарей, а здесь как раз заботиться и придётся: мало того, что сервопривод постоянно удерживает определённые положения и тратит на это энергию, так ещё у него идёт и постоянный износ встроенного потенциометра, что достаточно быстро приведёт к эффекту «дрожания», когда сервопривод даже в состоянии покоя, пытаясь удерживать определённый угол, будет постоянно колебаться на некий угол влево/вправо.
И это всё, не говоря уже и о том, что для управления сервоприводом постоянно должен работать микроконтроллер, что тоже затраты энергии.
Поэтому, несмотря на внешне кажущееся привлекательным техническое решение, нам оно не годится и мы идём дальше…
Итак, вроде как мы всё перебрали и нам ничего не годится? А вот и нет, есть ещё одно замечательное решение, которое сочетает в себе как возможность большой тяги, так и жёсткой фиксации в любом положении без каких-либо затрат энергии на это удержание: червячный редуктор!
Подобный редуктор хорош тем, что он обладает хорошим разрешением, то есть позволяет поворачивать вал на весьма малые значения (точная затяжка шнурков — это важно, иногда немножко перетянешь и уже ногам неприятно). Кроме того, он обладает самым важным качеством для нас: такой редуктор весьма легко вращается, если пытаться вращать его со стороны двигателя и, с другой стороны, практически невозможно провернуть его вал, если попытаться приложить внешнюю силу к валу этого редуктора, выходящего в сторону потенциальной полезной нагрузки.
То есть, говоря простыми словами, в нашем применении этот редуктор позволяет как точно затянуть шнурки, так и жёстко зафиксироваться в затянутом или расслабленном положении, не тратя на это удержание никакой энергии. То, что нужно!
Кстати говоря, мне удалось найти видео, где энтузиасты разбирают один из типов кроссовок Nike, снабжённых функцией автозатяжки, и там в одном из моментов хорошо видно, что используется как раз редуктор червячного типа:
Воистину, мысли инженеров с разных континентов — сходятся (я обнаружил это видео только после того, как уже самостоятельно, по ходу своих логических рассуждений дошёл до такого решения). Тем не менее, следует отметить, что самозатягивающийся модуль от Nike имеет достаточно нескромные размеры, на мой взгляд, весьма избыточные, так как то же самое можно сделать гораздо меньше по размерам и гораздо элегантней.
Так как подобного двигателя с редуктором у меня под рукой не оказалось, я смоделировал и распечатал небольшой «испытательный стенд» для проверки работоспособности самой идеи. На относительно большой размер этого стенда пока внимания не обращаем, так как это просто эксперимент:
Итак, мы разобрались с механической частью, посмотрим на другие компоненты системы…
▍ Шнурки
Как можно было видеть в примере выше, где использовался сервопривод, там в качестве шнурков был гибкий шнур, и это не случайно. Наш будущий «механизированный шнурок» должен обладать свойством не только надёжно удерживать ботинок на ноге (читай «особо не растягиваться»), но и быть достаточно упругим, не выглядеть «как тряпочка», чтобы в момент ослабления этого шнурка он фактически представлял собой эдакую «гибкую трость» за счёт своей упругости, передавая расслабление через все отверстия в шнуровке.
Размышляя над подходящим для этого решением, я в первую очередь подумал об идее использовать толстую рыболовную леску (1-2 мм диаметром): такая леска очень мало растягивается (по крайней мере, в рамках нашего применения), выдерживает большие нагрузки, потенциально способна за счёт своей упругости передавать расслабление через все отверстия, достаточно износоустойчива.
Однако в процессе практического поиска такой лески я столкнулся с проблемой: они практически не продаются в общедоступных магазинах, а там, где хоть какая-то леска есть, то она обычно достаточно тонкая и неоправданно дорогая даже для тонких лесок, не говоря уже о толстой, которая требуется нам.
Тем не менее, мне удалось найти подходящие лески на Яндекс Маркете, однако, практически параллельно с этим, мне пришла в голову гораздо лучшая идея: а что, если использовать леску для триммеров, которыми стригут газоны?!
Обычно такие лески имеются в изобилии во многих хозмагах. Сказано — сделано: я пошёл в Леруа и нашёл там подходящую леску диаметром 1,5 мм круглого сечения (там были ещё квадратного и звездообразного):

Дополнительным бонусом этой лески является то, что она имеет кислотно-зелёный, весьма привлекательный вид, а сама леска изготовлена из нейлона.
Упругость и в то же время гибкость лески находится (субъективно, по моим ощущениям) на нужном уровне: она достаточно гибкая, чтобы её ещё можно было наматывать на некую маленькую катушку, и в то же время достаточно упругая, чтобы передавать расслабление через все отверстия.
Кроме того, там есть лески и больших диаметров, что потенциально может быть весьма полезно с целью защитить отверстия в ботинках/кроссовках от разнашивания, если они не снабжены металлическими люверсами (ну, знаете, такие металлические каналы, которыми обычно отделывают отверстия ботинок для шнуровки).
Итак, с будущим шнурком мы определились, идём дальше…
▍ «Мозг» системы
В самом простом варианте для управления электродвигателем нам достаточно только простого переключателя, который будет включать/отключать подачу электричества на электродвигатель. Но, несмотря на кажущуюся простоту решения, «дьявол», как всегда, в деталях: во-первых, необходим некий реверсный переключатель, позволяющий как затянуть шнурок, так и ослабить его, либо же, пара переключателей. А это — механика, заедания, замыкания, неточные срабатывания, условно большие размеры.
Поэтому мы не пойдём этим путём, и для управления электродвигателем будем использовать микроконтроллер.
Некоторое время назад я взял парочку достаточно компактных микроконтроллеров esp32 C3 SuperMini, показавшихся мне весьма привлекательными ввиду своего размера:
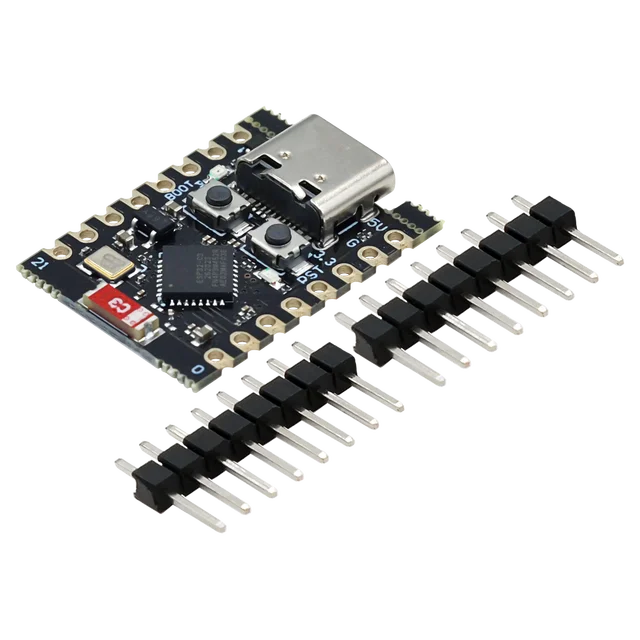
И у меня сразу же появилась идея использовать эти микроконтроллеры в этом проекте, так как надеялся использовать их сенсорные (ёмкостные) пины, по крайней мере, предполагая, что они там есть, как и в полноразмерной esp32.
Однако в этом меня ждала неудача, так как удалось выяснить на форуме разработчиков esp32, что эта компактная версия, к сожалению, не содержит сенсорных пинов. Ок, отложим её до лучших времён…
Тем не менее, если вы не испытываете предвзятого отношения к механике, то вполне можете использовать её. В остальном она весьма неплоха: имеет малые размеры, содержит также wi-fi и Bluetooth BLE, умеет уходить в режим глубокого сна с потреблением в этом режиме всего лишь в 5 мА (на этом режиме я ещё остановлюсь подробнее ниже), что при её стоимости в чуть более чем 200 руб. делает её достаточно привлекательным микроконтроллером для самоделок.
Но всё же, почему именно сенсорные пины? Дело в том, я хотел максимально уйти от механики, не используя даже механические микрокнопки, чтобы обеспечить высокий уровень надёжности носимой электроники (помимо собственно отсутствия ненадёжной механики, наличие сенсорных пинов позволяет создать практически абсолютно герметичную систему с выведенными наружу только металлическими площадками для касания).
Например, вся электроника помещается в корпус, который изготовлен с применением 3D-печати, а наружу выведены только две головки болтиков, на резьбе, с предварительным промазыванием резьбы клеем, до их вкручивания в корпус (для герметичности). Для большей эстетичности можно взять какие-либо декоративные болтики с фигурными головками (часто такие болтики выпускаются для тюнинга компьютеров).
Поэтому остановимся на стандартной версии 30-пиновой esp-wroom 32:

Помимо наличия уже озвученных сенсорных пинов, полный перечень которых и примеры работы с ними можно найти вот здесь, по этой версии микроконтроллера имеется большое количество документации и мануалов, что нам только на руку.
Например, оттуда же мы узнаем, что это большая версия микроконтроллера имеет также целый ряд режимов сна, подробное описание и примеры работы с которыми можно найти вот здесь и здесь.
Также мы узнаем, что, например, можем перевести микроконтроллер в режим DEEP SLEEP, в котором его энергопотребление составит:

Зачем вообще нам это выяснять: потому что мы бьёмся за энергоэффективность, и если проблему энергоэффективности мы для двигателя решили, то теперь стоит озаботиться и об энергоэффективности для микроконтроллера.
Как можно было видеть по ссылке выше, микроконтроллер может быть переведён в режим глубокого сна, из которого его можно вывести рядом способов, один из которых заключается в касании сенсорных пинов. То, что нужно!
То есть, другими словами, мы можем написать такой код, который при касании сенсорного пина разбудит микроконтроллер, повращает двигатель, а после отпускания сенсорного пина выключит двигатель и переведёт микроконтроллер опять в режим глубокого сна (где-то вдали слышны аплодисменты батареек :-)
▍ Драйвер двигателя
Так как двигатель невозможно подключить напрямую к микроконтроллеру, понадобится ещё и драйвер двигателя.
В качестве такого драйвера я решил использовать купленные когда-то давно по случаю миниатюрные двухканальные (может управлять двумя коллекторными двигателями или одним шаговым) драйверы, поддерживающие максимальный ток до 2А на канал — DRV8833.
От других драйверов они отличаются тем, что у них есть отдельный пин (EEP), который позволяет переводить драйвер в режим сна, в котором энергопотребление составляет 1,6-2,5 мА:

Благодаря своему маленькому размеру, такие драйверы весьма интересны для использования в миниатюрной электронике.
Для такой миниатюрной системы не грех изготовить и печатную плату — весьма аккуратная и маленькая система должна получиться (но этим я займусь уже несколько позже).
Таким образом, у нас при касании сенсорного пина пробуждается микроконтроллер, пробуждается драйвер, после чего запускается двигатель. При отпускании пина процесс идёт в обратном направлении.
Единственный момент, который я обнаружил, что даже в режиме сна у драйвера продолжает светиться сигнальный светодиод. Так что, если корпус устройства будет прозрачным, «киберботинки» будут пугать по ночам котов:-)
Для более гибкого управления скоростью вращения двигателя я добавил в скетч ШИМ.
▍ Модный Look
Некоторое время назад, мне довелось поработать с небольшим OLED-дисплеем, с размерами экрана примерно 26х12 мм (фото не передаёт реальной яркости дисплея):

Он отличается тем, что его высокая контрастность и достаточная яркость субъективно воспринимаются как довольно «вырвиглазные» (что хорошо!), поэтому надписи на нём будут хорошо видны, а в тёмное время суток — особенно (фактически, как мини-фонарик).
Добавим к нашему устройству ещё этот дисплей, чтобы на нём при нажатии на одну кнопку выводилась какая-нибудь модная надпись, что-то вроде: SYSTEM CLOSED, а при нажатии на другую: SYSTEM OPENED.
Там ещё с библиотекой поставляется некоторое количество примеров, так что можно реализовать отображение картинок, мерцание, бегущую строку, 3D-вращающиеся объекты. То есть, например, можно сделать так, чтобы после нажатия на расслабление шнурка экран резко вспыхнул, потом начал крутиться 3D-куб (пока идёт расслабление) и рядом была надпись. А после отпускания кнопки — всё пропало со вспышкой :-) В общем — всё в ваших руках…
Все компоненты системы, включая дисплей, если положить их рядом, занимают достаточно малое место (если изготовить под это печатную плату, будет совсем хорошо):


Готовый скетч, содержащий ещё и добавленную поддержку дисплея, можно скачать здесь.
Скетч выше содержит работу с сенсорными пинами, двигателем, экраном и усыпление драйвера. Усыпление esp32 я оставил доделать вам, ибо ссылки выше есть — там не сильно сложно ;-)
Для защиты такого дисплея от атмосферных условий придётся подумать ещё и над прозрачным защитным экраном, устанавливаемым перед дисплеем (изготовив его либо 3D-печатью с последующей полировкой, либо взяв готовую прозрачную некую пластину).
Кстати, о защите от атмосферных условий, я вижу её себе такой: корпус распечатывается 3D-печатью, являясь разборным. В одной из половинок делается канал, куда закладывается резиновое кольцо, купленное в любом хозмаге. После привинчивания одной половинки к другой кольцо надёжно герметизирует внутренний объём. То же самое проделывается и с каналом выходящего наружу вала двигателя (тоже герметизируется О-образной резинкой):

Схема электрических соединений системы показана ниже:

▍ Питание и контроль за его уровнем
Питание такого устройства должно вестись, на мой взгляд, от аккумулятора, но, как мы могли видеть выше, в видео про самозатягивающиеся шнурки от Puma, там используется довольно-таки увесистая батарея, которую можно вынимать и перезаряжать.
На мой взгляд, такое решение является достаточно тяжеловесным с инженерной точки зрения и лично мне хотелось бы вообще не думать о батарее!
Как этого можно добиться? Одним из довольно интересных вариантов, на мой взгляд, является использование компактных генераторов, вырабатывающих электроэнергию и подзаряжающих аккумулятор во время ходьбы (грех не использовать такой источник энергии, как ты сам).
Одним из таких интересных решений является использование обычных пьезопищалок, которые можно положить под стельку, они будут занимать очень мало места и практически ничего не весить:
Если же окажется, что такие пьезоэлементы вырабатывают слишком мало электроэнергии, то можно попробовать изготовить самостоятельно микрогенератор, в качестве которого, на мой взгляд, можно использовать небольшую трубочку 6х20 мм или что-то вроде того, в которой перемещается туда-сюда подпружиненный цилиндрический неодимовый магнитик, а трубочка снаружи обмотана проводом, в котором наводится электрический ток во время ходьбы и перемещения магнитика от резких толчков при шагах. Ну и, соответственно, выпрямление этого тока, стабилизацию и прочее можно прикрутить – этот момент я пока опускаю, тут будет зона вашего свободного творчества.
Учитывая, что у нас вся система постоянно находится в режиме сна, а когда работает — работает кратковременно, теоретически, какого-то такого маленького генератора должно хватить для постоянного подзаряда аккумулятора.
Но, есть ещё один способ! Самый, на мой взгляд, интересный и эффективный с точки зрения выработки электроэнергии! Суть вкратце заключается в том, что мы можем позаимствовать принцип автоподзавода у ручных механических часов. Но для начала посмотрим, как устроены такие часы с автоподзаводом (смотреть с 2:40, а то Хабр не позволяет вставить перемотанное видео):
То есть мы видим, что устройство автоподзавода представляет собой половину диска, то есть эксцентрик, который колеблется при ходьбе и подзаводит пружину часового механизма.
А что, если мы возьмём не половину диска, а целый диск, напечатанный 3D-печатью, со вставленным в центр подшипником, внедрим в него, в предварительно оставленные ячейки (с одной стороны и другой стороны) плоские прямоугольные магнитики, например, 10х5х1мм, таким образом, чтобы с одной стороны магнитиков было больше, то есть, другими словами, у нас получится диск-эксцентрик.
Теперь, если мы его расположим горизонтально, поместим в герметичный корпус (также распечатанный 3D-печатью) и спрячем в подошве, например, под стелькой, то при ходьбе, этот эксцентрик неизбежно начнёт раскручиваться, и, подозреваю, что достигнет довольно-таки неплохих оборотов, которые будут постоянно поддерживаться во время ходьбы!
Таким интересным способом мы получим механический ротор, постоянно быстро вращающийся при ходьбе!
Но ротора мало, нужны ещё и электрические обмотки (провода), чтобы вырабатывать ток. И тут мы можем применить очень интересный лайфхак, который частенько применяется в плоских двигателях/генераторах: мы не будем наматывать никакие обмотки, вместо этого мы сверху и снизу от вращающегося ротора расположим печатную плату с протравленными на ней дорожками в виде обмоток!
Для примера предлагаю посмотреть следующие видео:
Вот таким хитрым способом и без особых трудов мы получим весьма компактный и плоский генератор, быстро вращающийся при ходьбе и вырабатывающий, предполагаю, достаточно неплохое количество электричества! После чего без проблем спрячем его под стелькой. Подозреваю, что в изготовлении такого генератора будет огромным подспорьем наличие фотополимерного 3D-принтера (ну не всю же жизнь «красотень» клепать — надо и за механику когда-то браться :-)
При некоторой смекалке можно попробовать обойтись даже совсем без магнитов — изготовив ротор таким же способом (из печатной платы). А затем подавать на него изначальный импульс электроэнергии, чтобы у обмоток ротора появилось магнитное поле, после чего это поле будет постоянно поддерживаться за счёт отбора части мощности с его собственной генерации — насколько я понимаю, как раз такой принцип используется во всех автомобильных генераторах (и не только):
Но с магнитами, конечно, несколько проще (хотя, наверное, тут кому как). В общем, как мы видим, прелюбопытная система должна получиться…
По поводу плоского генератора есть у меня статья, там много нюансов — рекомендую ознакомиться, если кто-то заинтересуется.
Чтобы избежать ситуации, когда мы не уследили и аккумулятор разрядился, можно сделать так, чтобы система периодически просыпалась, например, один раз в 3 часа, и посылала по Bluetooth сообщение на смартфон владельцу с текущим значением заряда, где при его падении ниже определённого уровня у владельца на смартфоне выскакивает уведомление.
Подытоживая всё вышесказанное, я самое вкусное оставил напоследок, а именно: как можно видеть, система в принципе неплохо работает, но не отличается особой компактностью, а всё из-за того, что это всего лишь испытательный стенд.
В реальной же системе я рекомендую использовать одну из версий упомянутого ранее двигателя N20, только с червячным редуктором:

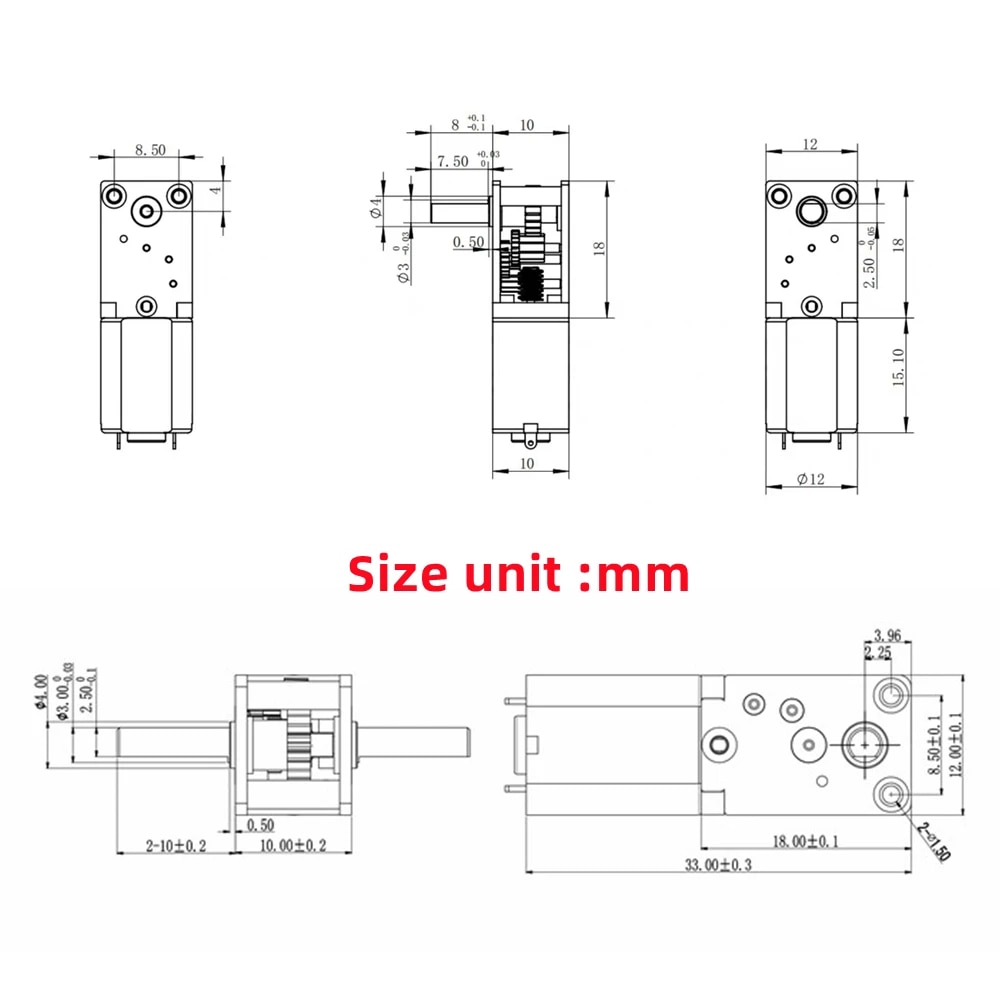
Именно такой я себе и заказал, и парочка таких прямо сейчас идёт ко мне с Али. Если вы захотите построить нечто подобное на таких же двигателях, то могу сказать, что стоят они чуть более 300 руб. за штуку, а найти их можно по ключевым словам, что-то типа n20 screw gear motor.
Ну и небольшой тест (насколько позволил имеющийся на руках 3D-печатный редуктор):
Как я и сказал выше, для повышения оборотов (чтобы быстрее затягивать/ослаблять шнурки) можно использовать DC-DC преобразователь, например, MT3608:

У которого, как видим, так же всё хорошо с энергоэффективностью — ток в состоянии покоя всего лишь 2 мА.
Скажем, у меня был опыт поднятия питающего напряжения до 12 вольт — для 3-вольтовых двигателей. И ничего — живут и здравствуют… А учитывая, что у нас система работает весьма кратковременно, вполне себе сгодится такое решение.
Как можно понять по рассказу выше, построение подобной системы поднимает множество интересных инженерных вопросов, потенциально может позволить улучшить качество текущего быта ну и является очень увлекательным само по себе. Ну что, делаем?
P. S. Теперь придётся заряжать даже шнурки. А что делать — время такое… :-)
P. P. S. Посмотрел ещё раз на свои будущие редукторы — они дают чуть более 1,5 об/сек, а не 3 (если использовать по дефолту, не повышая напряжение). Ну, тоже довольно бодренько.
Telegram-канал со скидками, розыгрышами призов и новостями IT ?

Комментарии (27)


sintech
28.03.2024 13:06Продумано все кроме самого главного - куда в заводских кроссовках засунуть этот мотор с редуктором?

DAN_SEA Автор
28.03.2024 13:06+3Я предполагаю разместить на язычке, на самом верху, около ноги. Всё в герметичном корпусе и никуда не прикреплено - нет нужды, т.к. леска для триммера весьма прочная и будет на ней всё "висеть", плотно прижатое к ноге. во время затяжки/ослабления - придерживать этот модуль рукой.
Обязательно сделаю и микрогенератор для постоянной подзарядки. "Во-первых, это весело..." ©
sintech
28.03.2024 13:06+1Это интересный вариант, потому что не требует модификации ботинок. Но а в чем тогда его достоинство по сравнению с обычными шнурками? Времени ведь такое завязывание займет даже больше, чем обычные шнурки и намного больше чем ваша защелка.
Это как с электроприводами регулировок сидения в машине, когда надо быстро откинуть спинку приходится сидеть и слушать гудение моторчиков, а на простой машине - один щелчок и готово.
DAN_SEA Автор
28.03.2024 13:06+1Достоинство - "оно само" и точный контроль степени затяжки. Да и вообще, - "удобство наше всё" :). А насчет времени - вы не судите по 3D-печатному редуктору. Покупной металлический редуктор - даёт 1,5 об/сек без повышения напряжения и (полагаю) - порядка 6 об/сек - с повышением. Там всё очень быстро будет. Тем более, не надо километры шнурка разматывать/заматывать. Сантиметра 2-2,5 на размотку/смотку и хватит - чтобы ботинок скинуть или надеть.

NeoNN
28.03.2024 13:06+8Покупая недавно детскую обувь, увидел доселе невиданный механизм, который сейчас располагают на обуви вместо шнурков, он представляет собой шайбу и лески, при вращении шайбы лески стягиваются и застегивают обувь, при подъеме шайбы со щелчком они ослабляются. Крайне удобно. Подумалось, что такое проще простого автоматизировать.

fermentum
28.03.2024 13:06+1Это шнуровка BOA, широко применяется на сноубордических ботинках. Там вообще много интересных решений по быстрой шнуровке используется.

Germanjon
28.03.2024 13:06Механическая часть устройства должна обладать тремя неотъемлемыми качествами:
после натяжения шнурка способностью удерживать его в таком состоянии;
Сразу возникает вопрос - а зачем моторчик должен фиксировать шнурок в натянутом состоянии? Это может сделать какая-либо полустатичная защёлка (откр/закр). Тогда на удержание шнурка не будет тратиться энергия. Собственно, на обычных шнурках задачи натяжения (человек тянет) и удержания (завязанный двойной рифовый узел держит) разделены между акторами.
Насчёт энергоэффективности. Теоретически можно подумать в сторону рекуперации - когда шнурок высвобождается и человек его ослабляет (в том числе, снимая с ноги) - часть энергии можно возвращать в аккумулятор. Но это усложнит схему

strvv
28.03.2024 13:06Да, и как я хотел заметить, червячный редуктор плохо обратно работает. т.е. усилие изнутри значительно меньше, на много порядков, чем усилие, позволяющие провернуть червяк. Обычно слизывают зубья шестерни, чем сдвинут червяк.
Ваша идея, насчёт рекуперации, вообще фонтан.
Практически, даже в хорошо обратимых системах, энергия рекуперации, доведенная до батарей, настолько мала, в отличии от усложнения системы, что проще энергию рекуперации вести в резисторы.
На хабре это отмечено в статьях про электропривод карьерных самосвалов, казалось и кинетическая энергия более чем достаточна (масса*скорость), но - увы.

Jury_78
28.03.2024 13:06+1Зачем вообще нам это выяснять: потому что мы бьёмся за энергоэффективность
Какой нибудь старый pic microchip посмотрит на ваши цифры с удивлением :)



censor2005
28.03.2024 13:06Мне кажется, у вас в статье перепутаны мА (миллиамперы) и мкА (микроамперы). 5мА - довольно много, думаю будет быстро разряжать батарейку.
DAN_SEA Автор
28.03.2024 13:06Нет, там всё так, именно в мА ;-) Я тут думал просто исходя из своих реалий- что ежедневно я прохожу довольно таки много (заставляю себя). И будет ежедневный подзаряд. Либо можно поступить проще: механические кнопки-замыкатели, которые на короткое время запитывают схему. Тогда можно обойтись всего 2 деталями: аккумулятор и двигатель/редуктор :)
censor2005
28.03.2024 13:06+1μA - это микроамперы, мА - миллиамперы. Проверьте, всё-таки )
strvv
28.03.2024 13:06в случае esp, к сожалению, это считается более чем немного, в отличии от других микроконтроллерных ядер.

fivlabor
28.03.2024 13:06С esp32 такая засада: сам процессор в deepsleep действительно микроамперы потребляет, но на платах esp32-cam, esp32-wroom обычно стоит LDO ams1117-3.3 и вот именно эта микросхема уже 3-5 мА. В даташите "quiscent current" указан до 10мА.
Для макетов норм, а для своих устройств уже следует импульсный преобразователь брать. Там и другие микросхемы в режиме сна немного жрут и всякие подтягивающие резисторы.
В любом случае, в сравнении с током вращения электродвигателя это мизер.

Apxuej
28.03.2024 13:06+1Я восхищён инженерной мыслью автора, однако отмечу, что уже давно продаются кроссовки, которые не то что не нужно шнуровать, но даже ложка для их надевания не нужна. Просто за счёт эластичности материала корпуса работают (и относительной жёсткости пяточной части), плюс некоторые бывают c регулировщиком давления в виде тянущихся шнурков, которые надо один раз настроить. В них можно и бегать и заниматься спортом типа тенниса, например.


Tanriol
28.03.2024 13:06+5А классический труд Выбегаллы «Основы технологии производства самонадевающейся обуви», набитый демагогической болтовнёй, произвёл в своё время заботами Б. Питомника изрядный шум. (Позже выяснилось, что самонадевающиеся ботинки стоят дороже мотоцикла и боятся пыли и сырости.)
А. и Б. Стругацкие, "Понедельник начинается в субботу". Извините, не удержался.

StanislavHabr
28.03.2024 13:06Как вариант - для плотной посадки обуви по ноге можно использовать пневматику - как в кроссовках Reebok Instapump Fury.

rombell
28.03.2024 13:06Вот про защёлки можно чуть подробнее? Идея самозатягивания крутая, без вариантов, но я её реализовывать не буду - и не моё, и смысла для моего использования не вижу.
А вот защёлки сделал бы )
DAN_SEA Автор
28.03.2024 13:06Почти как у меня, можно скачать тут: https://www.thingiverse.com/thing:2891464
И ещё пара альтернативных вариантов:

Aquahawk
А я недавно научился завязывать шнурки так