Я запустил и возглавил крутой робототехнический стартап, который мне удалось довести до первых продаж. Насколько мне известно, мы продвинулись дальше, чем любой другой аналогичный российский проект, но, около двух месяцев назад, я покинул его, передав управление команде, и сейчас никак с ним не связан.
В этой статье я хотел бы
— поделиться сделанными выводами
— порекомендовать проект, если вы хотите присоединиться к нему в качестве разработчика/инвестора
— выложить техническую документацию, если вы захотите сделать форк

Для начала – немного о том, чем мы занимались.
Целью проекта было создать дешевого универсального робота, имеющего возможности сопоставимые с человеческой рукой. Аналогичные скорость, грузоподъемность, точность – и по цене в десять раз ниже, чем у современных промышленных роботов.
Сейчас существуют два основных направления, в которых развиваются роботы-манипуляторы.
Первое – роботы, которые имеют малые размеры, 3-4 степени свободы, низкую точность, большие люфты и множество других ограничений, которые делают невозможным их использование для замены человеческого труда. Их назначение – игрушка для гиков или исследовательские проекты. Их производители вынуждены балансировать между технической сложностью конструкции, достаточной для удовлетворения любопытства покупателей, и ее ценой.
Второе направление – промышленная робототехника, которая широко используется, например, в автомобильном производстве для сборки, сварки и покраски деталей. Это роботы, которые имеют совершенно потрясающие характеристики (например, повторяемость – 0,05мм ), абсолютно недоступные человеку. Такие роботы могут использоваться для выполнения операций со скоростью и точностью, которые принципиально не могут быть достигнуты при использовании ручного труда. Также, за счет долгого времени жизни и при условии малого числа перерывов в работе, они могут оказываться дешевле, чем человек, выполняющий аналогичные функции.
Между этими двумя группами есть разрыв по цене на два порядка (10k-1m RUB) и, менее впечатляющей, но все равно существенный, разрыв по характеристикам. Именно в нишу находящуюся между этими двумя группами мы и целились.
Существуют огромные рынки, на которых используется ручной труд, и единственная причина этого — в том, что люди дешевле, чем аналогичная по функциям группа промышленных роботов. Примером может служить приготовление еды в фастфудах. Эта деятельность, которую легко прописать в виде алгоритма, в ней не нужна высокая точность или скорость. Если на рынке окажется робот со стоимостью равной нескольким месячным окладам неквалифицированного рабочего, и способностью выполнять хотя бы половину его работы, он окажется востребованным.
Отталкиваясь от этих предпосылок, мы определили целевые технические характеристики и дальше выбирали решения, которые позволяют их достичь при минимальной цене. Нам требовался робот с шестью степенями свободы (минимальное количество для того, чтобы иметь возможность передать любое движение), грузоподъемностью в 3 — 5 килограмм, повторяемостью движений (под нагрузкой и без) в районе 1-2 миллиметров, физическими размерами и скоростью сопоставимой с рукой человека. Целевая стоимость – около 150k RUB.
Если кратко – мы достигли этих целей. С некоторыми оговорками и в ограниченном количестве ситуаций, но у нас были результаты, позволяющие говорить, что мы на правильном пути.
Робот был протестирован в реальных условиях – летом в течение, примерно, трех месяцев он работал на выставке «Бал роботов», собирая на стенде макет бургера.
Затем, на основе полученных данных, мы исправили ошибки, провели модернизацию и недавно робот вернулся на выставку, где сейчас занимается тем же.
Также мы доказали, что на робота есть спрос – лендинговая страница с минимальной рекламой позволяла получать множество звонков и несколько запросов о покупке в неделю, чего вполне достаточно для старта продаж.
И, тем не менее, я принял решение выйти из проекта.
Это было сложное решение, с учетом вложенных усилий и наглядности полученного результата, но я понял, что путь, который пришлось пройти, практически никогда не приносил мне удовольствия. Каждый следующий шаг давался столь же тяжело, как и предыдущий, и чем больше был пройденный путь, тем длинней казался будущий.
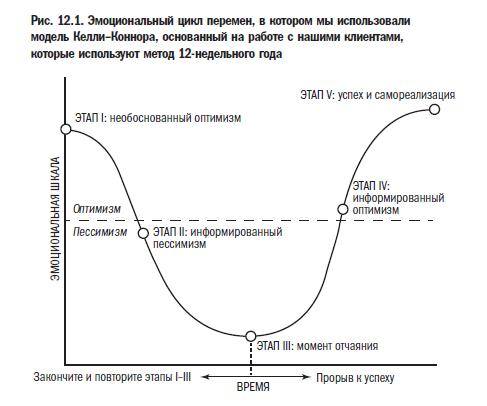
Для выхода было несколько причин, которые можно изобразить одной картинкой
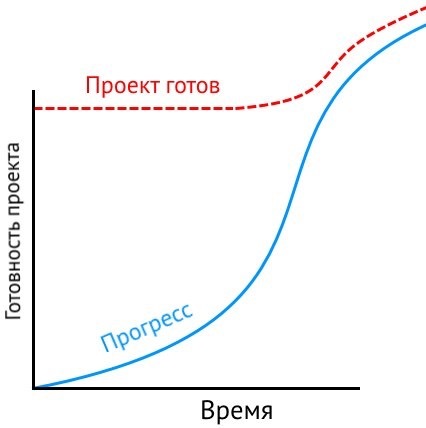
Но если детализировать, то:
— Сроки затягиваются. Широко известно как надо оценивать сроки выполнения технически сложного проекта, который ты делаешь впервые: возьми самую негативную оценку по времени, куда включены все возможные проблемы. А потом умножь ее на три. К сожалению, это правда.
— Видение меняется. Представление о том, что нужно заказчикам, значительно отличаются в начале разработки и в конце. Дело не только в том, что сформулировать некоторые требования потенциальный заказчик может только увидев работающий прототип, а удовлетворение этих требований, зачастую, требует значительных изменений. Некоторые технические аспекты (например, надежность) начинают выходить на первый план только после того, как прототип готов и начинаются его тесты в реальных условиях.
— Та стадия, которая раньше казалась стадией запуска продаж, теперь выглядит как промежуточный шаг. В каком-то смысле это продолжение предыдущего пункта. Недостаточно получить прототип, который работает «как надо». Проблемы той же надежности требуют существенных доработок конструкции, которые не влияют, на функциональные характеристики, но отнимают много времени, денег и ведут к повышению цены продукции. Причем почти никогда нет уверенности, что некоторая проблема решена один раз и навсегда – зачастую это можно понять только по статистике отказов, которую лучше набирать на дружественной близкорасположенной площадке, что очень сильно сужает спектр возможных заказчиков и, как следствие, отодвигает сроки выхода на самоокупаемость.
— Существенное ускорение работ может быть достигнуто только увеличением финансирования. При этом даты выхода на самоокупаемость сдвигаются все дальше в будущее.
Все перечисленные проблемы могут быть вызваны разными причинами, например:
1. Ошибки при руководстве проектом (Частично. Но те которые я вижу сейчас, не были для проекта смертельны)
2. Неудачно подобранная команда (Определенно нет)
3. Недостаточная гибкость (Частично. Мы слишком поздно начали развивать дополнительное направление (производство редукторов), которое позволяет сейчас проекту выживать где-то на границе самоокупаемости)
4. Несоответствие масштабов проекта выделенным на него ресурсам (Полагаю, что основное)
Выводы, которые я сделал за время проекта:
— Позаботьтесь о действительно стабильном финансировании или постарайтесь как можно быстрее перестать от него зависеть. Если вы делаете проект в первый раз, какой бы ни был бюджет – вы в него не уложитесь. В нашем случае, источником денег были зарплаты, получаемые сооснователями на основном месте работы. Это позволило развивать проект без оглядки на внешние факторы.
— Дедлайны важны. Однозначно определите цель и штрафные санкции в случае ее недостижения, это стимулирет к более эффективной работе. Жесткость санкций не должна убивать после первого же срабатывания, но последовательность сорванных дедлайнов является серьезным признаком, что что-то не так с постановкой целей или контролем за их выполнением.
— Команда важнее цели. Даже при ошибочных начальных предпосылках, гибкость, даваемая сильной командой, позволяет видеть альтернативы и менять направление движения без серьезных негативных последствий
Несмотря на мой выход из проекта, я испытываю чувство ответственности за проделанную работу, и хочу, чтобы сделанное нашими инженерами помогло как можно большему количеству людей. По согласованию с людьми оставшимися в проекте, я выкладываю техническую документацию, которая может помочь вам составить собственное мнение о нем.
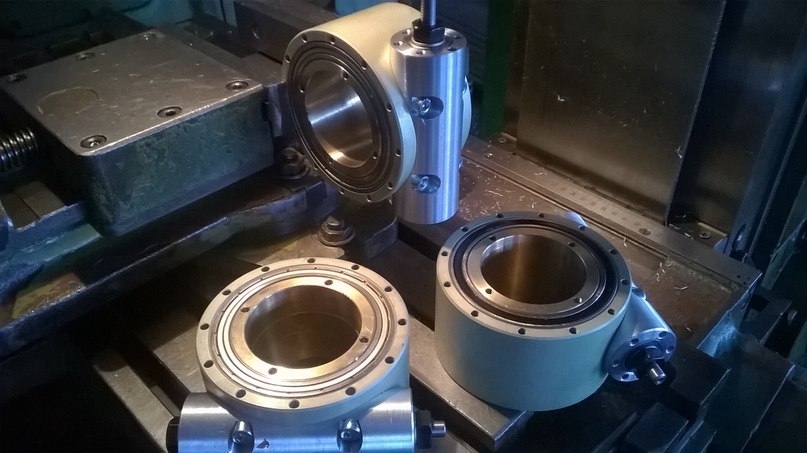
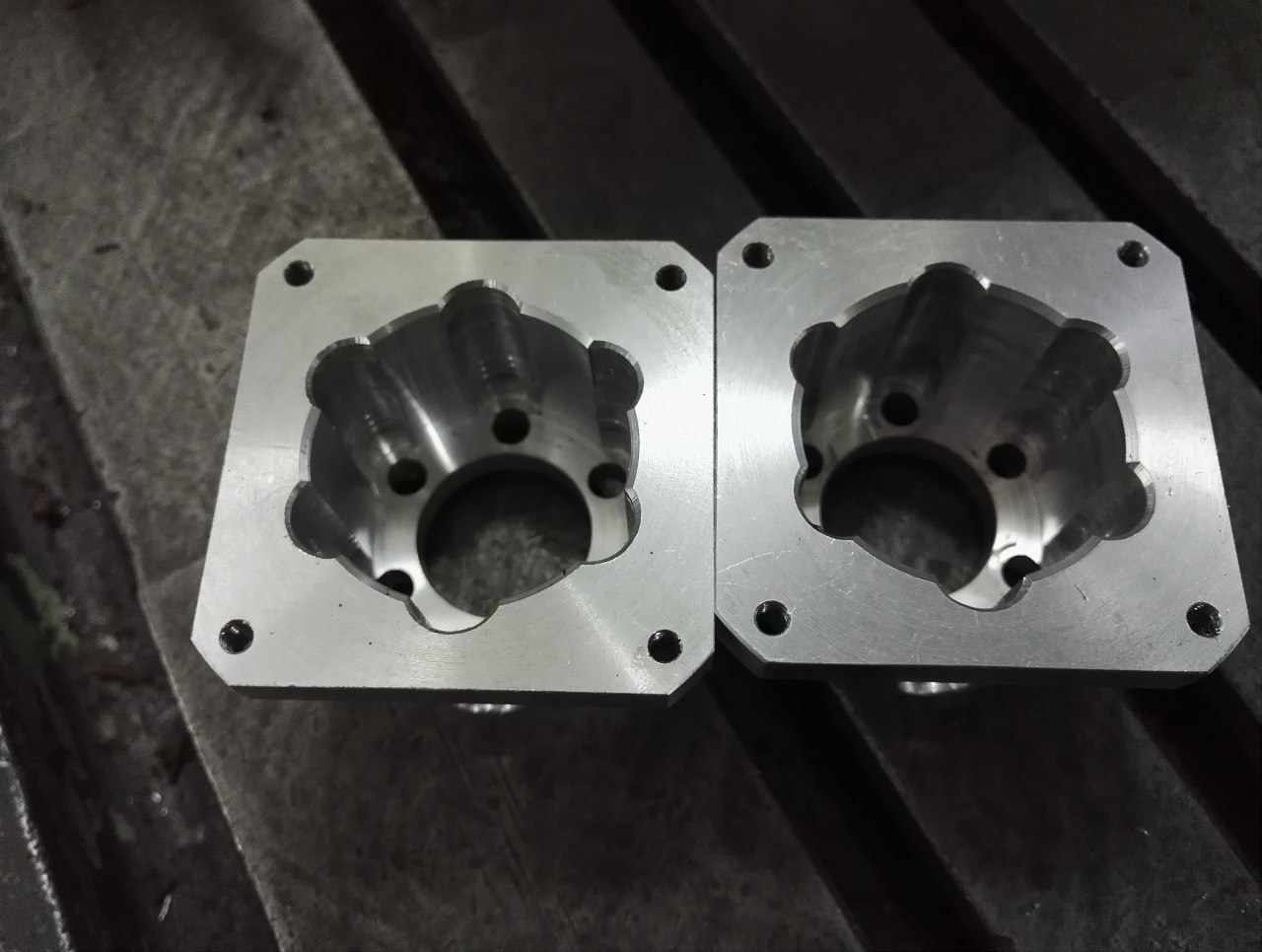
Все механические детали робота были спроектированы и изготовлены нами самостоятельно. Это позволяло экспериментировать с конструкцией, но значительно увеличило сроки разработки.


Было, как минимум, три особенности не характерные для других робототехнических проектов:
1. Шаговые двигатели вместо сервоприводов
2. Червячные редукторы вместо планетарно-цевочных или волновых
3. Практически полное отсутствие обратной связи
Использованные вместе, эти доработки позволили значительно снизить себестоимость конструкции.
Червячные редукторы, традиционно, считаются недостаточно точными для робототехники, но в случае изготовления на хорошем оборудовании и использования некоторых трюков (вроде выборки люфта сближением осей), они позволяют получить вполне достаточные для наших целей характеристики. Вместе с тем, червячные редукторы очень дешевы. В случае массового изготовления они почти на порядок дешевле редукторов используемых традиционно в робототехнике. Кроме того, они обладают одним крайне полезным свойством – даже значительные нагрузки на выходную ось не приводят к прокручиванию входной оси. Это позволяет снять проблему ударных нагрузок – они не передаются на ось двигателя, а при выключении питания робот гарантированно остается неподвижным.
Шаговые двигатели позволяют отказаться от дорогостоящих энкодеров. В каждый момент времени робот «не знает» где он расположен. У него есть только концевые датчики – что позволяет автоматически выходить в крайние положения по каждой из осей. Однако зная начальное положение и число сделанных шагов можно точно рассчитать текущее положение. Минусом данного подхода является проблема неотслеживаемого пропуска шагов, характерная для шаговых двигателей. Однако если соблюдать нагрузки, плавно разгонять/тормозить двигатель, проблем можно практически избежать. Те пропуски шагов, которые все-таки возникают, обычно не существенны в рамках одного цикла. Возврат в исходное положение (до срабатывания концевых датчиков) в конце каждого цикла работы позволяет избежать накопления ошибок.
По ссылке вы сможет найти 3D модель робота, чертежи а также фото/видео, раскрывающие историю разработки. Я буду рад, если вы решите присоединиться к проекту (контакты команды – во вложенных файлах) или если захотите развить свою ветку той же конструкции.
Участие в хардверном проекте это захватывающий опыт, который, несмотря на свое решение, я рекомендую повторить всем. Попробуйте взять что-то, во что вы верите и попробовать превратить это в бизнес. Это было безумно интересно для меня и, надеюсь, будет столь же интересно вам.
Комментарии (166)

ipavlenko
14.04.2017 23:40+12Определённо бросайте это гиблое дело…
Месяца на два.
А потом, я уверен, откроются и новые цели, и новые возможности.
И вернут вас в проект обратно.
Куда вы без него.Terras
15.04.2017 11:23+2Отличный совет.
У меня достаточно подвижный характер — частенько перепады идут настроения. В итоге, делаю-делаю-делаю — понимаю, что дело гиблое, все пустое, перспектив нет — я стою на месте. Забиваю на проект на месяц другой, потом возвращаюсь и снова все красиво и перспективно.
В итоге веду сейчас два дела — тематика IT, но достаточно сильно отличаются друг от друга, и прыгаю с одного на другого. Неплохо в общем получается.
Так что нужно просто разобраться в своем характере и понять, что вам херачить до победного 24/7 не всегда хорошо.baranov
15.04.2017 16:22+7Да это у всех так. Многие сдаются между 2 и 3 этапом. Те, кто не сдаются, достигают успеха.
Здесь можно прочитать больше.

Matvey-Kuk
14.04.2017 23:48+18Не знаю, предприниматель вы или нет. Но точно, что теперь «больше предприниматель», чем раньше.
PerlPower
15.04.2017 00:41+2Кто, если не секрет, заказывал у вас этого робота, и с какими проблемами столкнулся при эксплуатации?

giffok
15.04.2017 10:00+4Тут две ветки ответа — первая — кому интересно в принципе, вторая — какие реально продажи.
Начну со второй (грустной) части. Продаж именно робота нет. Не из-за того, что спроса нет, а из-за того, что я не готов был делать продажи конструкции, которая была объективно не готова к замене труда человека на достаточно качественном уровне. Сначала нам не хватало надежности, потом — не довели до конца работу с кодом (робот не учитывал в своей работе показания концевых датчиков по каждой из осей => на каждом цикле накапливалась ошибка => нужен был человек рядом для контроля производимых действий). Вроде бы сейчас все проблемы решили и на последнем выезде на выставку за экспонирование нам платят деньги, но подробностей и конкретной суммы я не знаю, произошло уже после моего ухода.
Продажи есть, но не там, где мы ожидали. В процессе разработки робота мы сделали неплохие червячные редукторы которые идеально под наши цели подходят. И внезапно оказалось, что они-то как раз нужны людям. У них отличные характеристики и относительно низкая цена. На данный момент мы делаем и продаем их. Это плюс — параллельно обкатываются процессы производства редукторов для робота и снижается их себестоимость. и еще благодаря им мы начали выходить в ноль (ну или не такой большой минус, как раньше). Но у них очень долгий цикл продаж — несколько месяцев — поэтому есть надежда, что в будущем ситуация будет улучшаться.
Теперь о первой части — кто в принципе хотел купить робота. Было три больших группы потенциальных заказчиков.
Первые — конечные пользователи со своим небольшим бизнесом. С помощью робота они хотели мыть машины, сваривать металлические двери, складывать коробки (таких, внезапно, было трое из разных концов страны), разливать напитки и куча всего еще.
Второе — посредники-консалтеры, которые специализируются на робототехнике и хотели бы предлагать своим клиентам нашего робота как дешевую альтернативу имеющимся на рынке промышленным роботам в тех областях, где высокие характеристики не нужны. Меня удивило, что конечные пользователи продукции, которым хотели поставлять эти решения, в половине случаев были как-то связаны с оборонкой (от тестирования детонаторов до сборки самолетов).
Третье — самая большая группа — люди, которым робот нужен был просто как яркий объект для привлечения внимания. «Давайте мы поставим его к себе в магазин, люди будут заходить посмотреть и что-то купят заодно». Их не волновало — что именно робот будет делать, главное чтобы он двигался и привлекал внимание. Для них важна была только эта характеристика и, в общем-то, никакой разницы между роботом, абстрактной скульптурой или промоутером для них не было. В итоге, мы решили, на время, пока обкатываем конструкцию, продавать/сдавать робота именно таким заказчикам, при условии, что они территориально будут недалеко от нас. У меня нет последней информации по проекту, но, полагаю, что с выставкой (упомянутой в статье) сейчас все идет хорошо. Если это так — в ближайшее время разместим еще пару роботов где-нибудь еще по Москве.ittakir
15.04.2017 12:16+3Печально, что в нашей стране самая большая группа это третья. Где робота показывают в демонстрационных целях, а люди как папуасы смотрят: «Гляди, робот. Скайнет восстает!!!»
И появляются такие новости: http://www.ntv.ru/novosti/1637377/
https://www.youtube.com/watch?v=UPh7uFMLmSw
https://www.youtube.com/watch?v=-6u7EhM-bW4
Блин, сделайте хотя бы обычный робот-пылесос. Не из титана, а из пластмассы. С навигацией. И чтоб работал. И купить можно было. За 10т.р.
dom1n1k
15.04.2017 16:52Парадокс, для мелкосерийного гаражного производства титан удобнее и технологичнее пластмассы.
Xandrmoro
15.04.2017 18:53+4Обработка титана на хоббийного уровня металлообрабатывающем оборудовании ведёт к такому износу, что дешевле купить несколько хороших принтеров.
А вот сталь да, часто проще пластика.dom1n1k
15.04.2017 19:28+1Принтер пригоден для штучного прототипирования, но не для серийного производства (запрошенная цена в 10к намекает именно на серийное производство).
follow39
17.04.2017 23:29Я один раз был волонтером на выставке роботов, т.к. учусь на робототехнической специальности, я был очень удивлен тому, что роботы управляются операторами за стеной. При том что посетителям выставляют это за прорыв в робототехнике.
Johanga
18.04.2017 11:39+1Робототехника это ведь не только ИИ, но и железо, а железо вполне можно показать с оператором в роле ИИ.

rznELVIS
15.04.2017 20:07+1а вам не кажется, что вы широкую нишу взяли? может лучше было бы делать универсального робота, но в какой-то определенной области. Допусти для расфасовки. А уж что он будет фасовать: мешки, стеклотару или свежую рыбу можно было бы настроить
propell-ant
16.04.2017 00:25+6Коробки складывать — это поди последователи МосИгры, бойкие ребята, судя по статьям.
Насчет «не предпринимателя» — это вы абсолютно правы, предприниматель находит свой кайф в прибыли и в отлаженной системе, он бы обнаружив спрос на редукторы спокойно занялся бы именно редукторами. Вернее пошел бы и нашел инвесторов, т.к. у хороших предпринимателей хорошее чутьё на требуемый размах.
Но это не означает, что вам предпринимательство закрыто, вы теперь знаете свои наиболее проблеммные места и сможете их в будущем учесть (если захотите). Можно же выбрать какой-нибудь «некайфовый» лично для вас вид деятельности и сфокусироваться на извлечении прибыли.

ternaus
15.04.2017 00:44Не по теме, просто навеяло постом.
Пару месяцев назад интервьюировался в стартап под названием Osaro.
Они пытаются работать над алгоритмом, который позволит программировать универсальных роботов, типа того, что разрабатывал автор поста, правда с добавление камер. Они пытются работать в направлении Reinforecement Learning, например, в режиме imitation learning, типа: наснимал с разных точек видео как на заводе похожие роботы машину собирают на конвеере, скормил программе, та обсмотрелась этих видео и можно руку + программа ставить на конвеер.
Задача крайне интересная, но когда я на onsite интервью их долго распрашивал про все это дело с точки зрения бизнеса, что они хотят и что они умеют, увиливали в том смысле, что: "У нас есть пара пилотных проектов" и "Инвесторы в нас верят".
В них, как в бизнес я не верю, а вот то, что их могут купить кто-то большой за их наработки — вполне. Жаль они пропали после onsite interview, ни да, ни нет.

QDeathNick
15.04.2017 01:06+1Было бы круто, если бы программа "обсмотрелась", как рабочие что-то делают, и начала повторять за ними.
lash05
15.04.2017 10:06Рабочий всё же периодически принимает решение, какую операцию как делать. Так что простое копирование механики мало что даст.
nckma
15.04.2017 10:06Ну а в принципе, как анимируются 3Д персонажи в играх и мультфильмах? Обвешивается реальный человек датчиками и бегает-прыгает. Снятые показания переносятся на персонаж. Что мешает обвешать рабочего датчиками и снять его перемещения?
nickName0
15.04.2017 15:13Позже появится необходимость скопировать и мышление этого человека.
А с этим, пока-что, не очень удачно получается.
Yane
15.04.2017 21:57В машинном обучении этим сейчас занимаются в разделе imitation learning. Вот, например, интересная статья про подход к этой задаче через соревнующиеся сети — https://openreview.net/pdf?id=B16dGcqlx. Это без учителя, чисто «инстинктивная» имитация действий другого «существа».
Однако, при всём этом пока нельзя сказать, что нейросети доросли до нормального имитирования действий человека.

Koobeton
15.04.2017 00:50+1Ну а теперь, когда решили, что Вы не предприниматель, какие планы на будущее, чем будете заниматься? Тоже что-то связанное с робототехникой или, наоборот, кардинальная смена сферы деятельности (разведение кроликов, конопли, порно-бизнес, etc...)?
TerraRist
15.04.2017 10:00+6Порно-бизнес по разведению кроликов, питающихся коноплёй и обслуживаемых робо-руками.
giffok
15.04.2017 10:17+2Примерно то же время, которое я занимаюсь роботом, я работаю по найму в страховой компании (автоматизация, отчетность, оптимизация процессов) и я понимаю, что меня в общем-то все устраивает.
Сейчас хотелось бы попытаться вырасти внутри крупной компании по должности/зарплате.
Это даст новые возможности.
Во-первых я смогу с новыми ресурсами запустить что-то свое.
Во-вторых, как я уже понял, крупным компаниям нужны крутые инновационные проекты, они их активно ищут. Люди, которые могут их запускать, в дефиците везде. Если ты сделал что-то, что экономит или приносит деньги и у этого чего-то хороший потенциал для развития — ты можешь сделать на его основе внутренний стартап. У тебя будут несопоставимо большие ресурсы, более высокая зарплата и гарантированный рынок сбыта. Да, ты не будешь владельцем итогового решения и не получишь все возможные плюсы от него, но косвенные бонусы предоставляемые работодателем с лихвой это все перекроют.
Так что ближайший план — сделать что-то крутое внутри крупной компании (мне сейчас нравится машинное обучение и сегментирование клиентов в оффлайне). Это реально и, похоже, это проще. Просто нужны другие навыки.
qwertyhp
15.04.2017 02:51+13… собирая на стенде макет бургера.
В случае съедобного бургера демонстрация выглядела бы зрелищнее и убеждащнее, в том числе и для Вас.
Возможно, следовало бы искать не заказчиков, а покупателей. А продажи осуществлять с гарантиями апгрейда, что ли. Вы столкнулись со стремлением «дойти до горизонта». Ну, или «дотянуться до морковки». Реальные условия эксплуатации в любом случае будут отличаться от стендовых, и выявить большинство проблем можно только в реале. А вот договориться с покупателем получать логи работы (обслуживания, коррекции его работы) Вашего робота для анализа — так это обязательно.
А одновременно с продажами можно было бы развивать новую концепцию.
РазделИте бизнес — и созидание. Иначе бизнес будет «держать Вас за горло».
создать дешевого универсального робота
Если у вас нет собственного производства, испытательной базы и специалистов в области конструкционных материалов и приводов, то есть два выхода: либо «брать языка» и чтобы он подсказывал — что, куда, как и почем, — либо решать задачу с применением серийных узлов и агрегатов (в которых, впрочем, тоже нужно ориентироваться и разбираться). Люди давно и целенаправленно занимаются разработкой таких узлов. Это сэкономило бы время и деньги.
Отказ от обратной связи не оправдан. Вы все равно к ней обратитесь — но прежде потратите много сил, организуя робот обходиться без нее. При этом система обратной связи может находиться и вне механизма робота — например, будучи реализованной в виде системы внешнего видеонаблюдения с элементами распознавания. Опять же: если не знаете, как — найдите тех, кто знает.
… имеющего возможности сопоставимые с человеческой рукой...
Подсознание подсказывает Вам, что то, что Вы создали, не имеет ничего общего с человеческой рукой и ее возможностями. Это маленький промышленный манипулятор. И как бы Вы его не совершенствовали — это ничего не меняет.
Попробуйте изменить вИдение задачи. Возможно, устройство, отправляющее работников фастфудов на биржу труда, должно выглядеть как-то иначе.
Отказываться от проекта не стОит. А вот дать мозгам отдохнуть — совсем другое дело.
И еще.
А Вы сами пытались (или планируете) использовать свое детище для своих нужд? Ну, тапочки там принести, чай намешать, бутерброд изобразить...? Если нет — то то, что Вы создавали, — это абстракция. У Вас не было возможности побыть «в шкуре» реального пользователя. А без этого многое в вашем детище будет оставаться неочевидным до поры, до времени.giffok
15.04.2017 10:24Спасибо за рекомендации, я обдумаю их.
В конце мы действительно разделили конструкторскую часть и продажи (точнее они самопроизвольно разделились) — и это сдвинуло дело с мертвой точки.
Да, я планировал использовать робота для своих целей. Не сразу, после отладки косяков на других заказчиках, но все же. Похоже, что да, если бы план развития подразумевал, использование робота для своих нужд с самого первого прототипа — развитие проекта пошло бы по другому, более оптимистичному пути.
hdfan2
15.04.2017 05:58+3Статья закончилась как-то на середине. Хотелось бы всё-таки узнать, с какими конкретно проблемами столкнулись (особенно техническими), какие решения оказались верными, а какие нет, и т.д.
giffok
15.04.2017 10:48+4Моя любимая проблема: мы соединили вал редуктора и двигателя муфтой. Муфта была не очень хорошей и для надежности, пока не придет новая партия, мы посадали ее на клей. Но после половины дня работы, из-за нагрева, клей расплавился и превратился в отличную смазку.
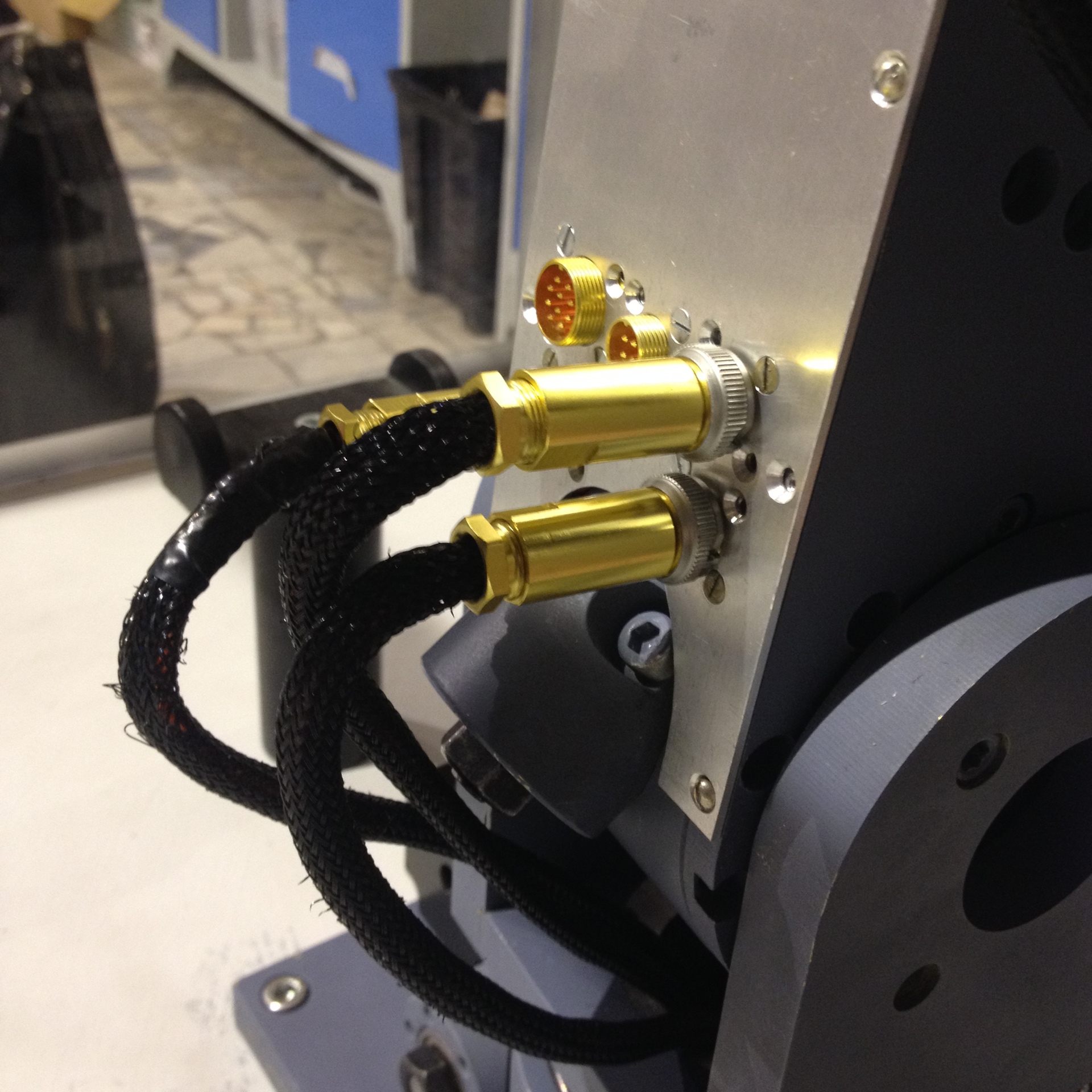
А вообще куча проблем, которые вроде-бы очевидны, но о которых не думаешь в начале. Скрутка проводов — не надежна. Пришлось везде, где есть какое-то движение, ставить разъемы. Программа управления не всегда корректно взаимодействует с драйверами шагового двигателя — пришлось переходить с MACH3 на программу от purelogic (кстати, похоже, она удобней). Двигатели недостаточно мощные и могут перегреваться — пришлось их увеличивать. Компрессор пневмосистемы может перегреваться. Электроника может перегреваться. Не все муфты одинаково надежны. Провода могут перетираться и коротить друг друга, если их провести не правильно. При сильных внешних вибрациях редукторы начинают на малые доли секунды заедать -> пропуск шагов. И куча других вещей, которые последовательно возникают перед тобой. После того, как решена одна проблема, обычно еще две-три минимум в очереди.
После первого запуска робот проработал полчаса, потом еще полчаса, потом еще 10 минут. Мы учли ошибки и за пару месяцев их исправили. В следующей серии испытаний, это были промежутки в несколько часов. После очередной порции исправлений — от половины дня до нескольких суток. В результате каждой итерации робот, очевидно, становится лучше. Но, столь же очевидно, впереди все еще долгий путь, прежде чем, мы дойдем до надежности, вида «можно на полгода оставить без присмотра и ничего не случится».nickName0
15.04.2017 15:13+2мы посадали ее на клей. Но после половины дня работы, из-за нагрева, клей расплавился и превратился в отличную смазку.
— Неудачно был выбран клей, получается. Его нормальный выбор можно сделать даже с помощью поисковика
(с привлечением спеца — сможе каждый).
Компрессор пневмосистемы может перегреваться. Электроника может перегреваться
— Что мешает использовать те-же классические варианты, что повсеместно используются в технике?
Ах да, это-же будет обратной связью.
Почему Вы решили от неё уйти, принципиально?
Ведь она, зачастую, позволяет достичь результата с гораздо меньшими затратами.
Да и Ваш доход от работы организации, это, по сути, обратная связь.
Вы всё-ещё против неё?
Скрутка проводов — не надежна. Пришлось везде, где есть какое-то движение, ставить разъемы
— А гибкие провода/шлейфы — не решение этого вопроса?
Есть и варианты оптической связи (весьма простые и надёжные).
Спасибо, статья — замечательная, и обсуждение — не менее интересное.
Но, всё-же, это есть обратная связь :)giffok
15.04.2017 15:27+2Я не против обратной связи в принципе — она прекрасна)
Но в роботе она осложняла конструкцию и повышала цену. Вариант который мы выбрали, вроде бы, позволял решать основные проблемы и не добавлял новых. Ну а все дальнейшее развитие проекта описывается словами «так исторически сложилось, но мы можем немного исправить здесь».
Тем не менее, ничего, что полностью убивало бы идею отсутствия обратной связи, мы, пока, не нашли. Да есть проблемы, но не критичные.
Исходной целью проекта было сделать «почти промышленного робота» по как можно более низкой цене. Я верю в то, что когда на рынке появляется новая технология с какой-то характеристикой на порядок отличающейся от преждних — это вызывает взрыв инноваций и меняет сам рынок. В этом проекте мы пытались снизить себестоимость и шли на все ради этого. Отказ от обратной связи — просто одно из следствий этой идеи.faleksander
15.04.2017 16:58+1Многие тут говорят про обратную связь. Согласен, тут две стороны, с одной — стоимость конструкции, с другой — точность работы. У вас в конструкции в любом случае есть концевые датчики. Может имело смысл сделать некий компромисс. Например, добавить некоторые датчики промежуточных состояний, и при получении сигнала от них, корректировать виртуальные координаты? Это может быть не полноценный энкодер, а например два диска с щелевыми отверстиями с оптикой. Не уверен насчет точности работы и надежности таких конструкций, но с пропусками это могло бы помочь. Навеное, это даже можно делать по тем же линиям, что и концевики, при условии согласования, конечно.
the_turkale_cat
15.04.2017 23:12А кто сказал, что шаговые двигатели не позволяют следить за положением собственного вала без датчиков положения? Как раз в отличие от BLDC и проч. шаговые двигатели позволяют узнать угловое положение вала в пределах количества шагов, соответствующих полному паттерну изменения токов фаз.
vbifkol
21.04.2017 06:55Эээ… Узнать или задать? Если мы железно удерживаем вал на нуле градусов, драйвер может подавать любое соотношение фаз, положение не изменится, а драйвер этого не узнает. Ну и да, ваше «определение положения» будет работать только внутри каждого сегмента в 1,8 градуса, различить сегменты между собой в принципе невозможно, а пропуски шагов ведут именно к смещению на настоящий шаг.
the_turkale_cat
21.04.2017 16:27С оптическими квадратурными энкодерами ровно то же самое — «определение положения» работает только внутри сегмента в 2*PI/Nрисок радиан, различить сегменты в принципе невозможно, однако же эти энкодеры работают везде. Наверное, всё дело в частоте регистрации изменения индуктивностей фаз, вернее, в отношении этой частоты к частоте изменения фазовых токов. Тогда, если мы заклиним вал ШД, измеритель индуктивности движения не увидит, что и нужно нам.
И да, каждый шаг ШД вызывает половину цикла изменения индуктивности, так что даже если мерять её раз в изменение тока обмоток ШД, всё нормально отслеживается.

comerc
15.04.2017 17:19-2мы посадали ее на клей. Но после половины дня работы, из-за нагрева, клей расплавился и превратился в отличную смазку.
— Неудачно был выбран клей, получается. Его нормальный выбор можно сделать даже с помощью поисковика
(с привлечением спеца — сможе каждый).В одной из лекций Маска услышал, что самая важная дисциплина — материаловедение.
ittakir
15.04.2017 06:34+15Извините меня за прямой ответ, но изначальная постановка задачи никуда не годится.
Вот как работает человек:
https://www.youtube.com/watch?v=x5Y6IgWKsWo
Обратная связь однозначно нужна. Булка не прилипла, сыр криво лежит. Рядом кто-то проходил и задел манипулятор — шаг двигателя пропущен. Нужно ставить камеру и распознование.
Энкодер совсем не дорогая штука, раз вы делаете редукторы сами. Он позволит ускорить двигатель и не боятся пропуска. Либо и вовсе поставить BLDC двигатели.
Кстати, о двигателях. У вас он двигается так: 1. влево, скорость 100%. 2. вниз, скорость 100%. Нужно так: 1. влево-вниз, ускорение 20 до скорости 100%, на конечной точке замедление 20. Выглядеть будет намного круче и профессиональнее! И плавное ускорение позволит повысить максимальную скорость без пропуска шагов.
Я бы вам предложил сделать Pick and place машину для SMD монтажа. Большие машины стоят очень больших денег. Даже китайские глупые автоматы без обратной связи стоят около 150т.р. Попробуйте сделать что-то небольшое, но с камерой, тысяч за 50. Можно даже в виде конструктора. Что мог бы позволить себе купить хоббист или небольшая компания.
https://youtu.be/ZngMoV325Sw?t=140nckma
15.04.2017 10:09Вот pick-and-place нашинка сделанная на коленках из старого принтера https://marsohod.org/projects/plata1/138-cloning
DEM_dwg
15.04.2017 10:25Угу, фаст-фуд, это не та тема где нужна сейчас автоматизация, хотя вот если сделать в каком то месте полностью автоматизированное кафе, тогда бы народ возможно пошел бы.
Можно было бы для Почты России сделать систему, которая подавала бы посылки.
Просто я обратил внимание, что дольше всего приходится ждать именно на последнем этапе в очереди.
iliasam
15.04.2017 11:04Можно было бы для Почты России сделать систему, которая подавала бы посылки.
Просто я обратил внимание, что дольше всего приходится ждать именно на последнем этапе в очереди.
Это называется почтомат. Вещь удобная, но занимает достаточно много места, которого в почтовых отделениях обычно мало.DEM_dwg
15.04.2017 11:09Нет я не про почтомат, он работает по типу банковских ячеек.
А я про обычные почтовые отделения.
Приходит человек, встает в очередь сканирует свое извещение.
Пока идет очередь, робот привозит посылку к оператору который выдает посылки.
Смысл в том что эти процессы можно запустить параллельно и значительно ускорить работу операторов.iliasam
15.04.2017 11:30+1Сейчас в почтовых отделениях посылки складывают доволно плотно (фактически, просто сваливают в кучу, или держат их в мешке). Это дает максимальную плотность хранения, но искать посылки приходится долго. Для того, чтобы робот мог сам взять нужную посылку, каждую посылку нужно хранить в отдельной ячейке в специальном стеллаже. Стеллаж занимает намного больше места, чем несколько мешков, а места на почте постоянно не хватает. Фактически такой стеллаж отличается от почтомата только отсутствием дверец на ячейках.
DEM_dwg
15.04.2017 11:34На одном стеллаже можно плместить несколько пакетов.
Если сделать распределение на крупные/мелкие пакеты, ну и соответственно стелажи разные.
То и плотность соответственно увеличится.redial
16.04.2017 19:30+1Идея ваша хороша, но возможность ее реализации будет понятна лишь тогда, когда вы сами побываете на почте, в разных отделениях и реально изучите возможность внедрения. Ощутите, так-сказать, масштаб беды по ту сторону стойки. Сделать можно все что угодно в масштабе одного взятого отделения, но менять надо всю систему хранения.
saege5b
16.04.2017 09:40+2Адсл Зуксель, с убитым чужим БП. И это достижение, не так давно ещё диал-апы были, а может они где-то ещё и стоят.
Лапша, скрутки.
Компы уровня Селеронов на гигагерц, с оперативой хорошо если на 128 метров.
Софт, где каждый чих переспрашивается индивидуально на сервере (заплнение выпадающего списка индивидуальными селектами на строчку!).
Мы точно говорим об одной Почте России?
giffok
15.04.2017 11:06На самом деле нет, там плавный разгон и, возможно, торможение, просто его не очень хорошо видно, т.к. скорость не максимальная и участок с ускорением быстро проходит. Мы могли запустить его быстрее (примерно в 2-3 раза), но по соображениям безопасности (вокруг куча детей) не стали этого делать. Ну и еще мы боялись возможного перегрева, износа редукторов, вибраций, внутреннего отрыва проводов и кучи других вещей, поэтому решили тогда запускать в медленном варианте))
При мгновенном разгоне действительно есть пропуск шагов или даже невозможность сдвинуться с места.
Энкодеры — возможно уже да. Но когда мы начинали разработку (года четыре назад), оказывалось, что отслеживание движений по каждой оси с точностью, хотя бы, в 5 градусов, удваивает цену конструкции и увеличивает количество проводов сверх всякой меры. и мы решили их не использовать
lomalkin
15.04.2017 18:48Про энкодеры все еще не понимаю, в чем именно проблема, в вашем случае действительно проще разработать свое решение, как мы и сделали в свое время, т.к. нужен был дешевый датчик угла поворота (разрешение получилось порядка 3.5 градусов, нам достаточно, но можно было и больше).
Суть: сдвоенный (если надо знать направление или одинарный, если нет) фотодатчик и диск с прорезями, как в шариковых мышах, подключается по 4 проводам. С одинарным вообще достаточно 3х.
Или вот еще описание: инкрементальный энкодер (easyelectronics)giffok
15.04.2017 23:05Мы как-то не думали в сторону разработки своего энкодера. Просто приняли за факт, что они дорогие и не обеспечивают необходимого разрешения.
В одной из веток ниже я отписался, что, по нашим расчетам, на момент старта проекта, они давали +10к на одну ось к цене. Возможно это был наш просчет или реалии российского рынка электроники 4 года назад — но мы не пошли по этому путиpropell-ant
16.04.2017 00:32+1Оптическую мышь (её датчик) не рассматривали в качестве возможного варианта? Физический принцип тот же, что у оптического энкодера…
iliasam
16.04.2017 12:08У китайцев сейчас есть оптические энкодеры за 12$.
Разрешение сравнимо с числом шагов шагового двигателя, но энкодер шаги не пропускает.
Есть абсолютные энкодеры на 1024 значений — TRD-NA1024NW за 25$.
Самые дешевые — магнитные энкодеры (их уже упомянули выше), но у них могут быть проблемы с линейностью.lomalkin
16.04.2017 18:26Свое оптическое, с худшими, но имхо достаточными параметрами будет гарантировано стоить меньше 1 доллара, без учета капиталки. (соответственно на большой партии можно еще дешевле).
Можно еще емкостные попробовать самим повторить (как в цифровом штангенциркуле), точности можно добиться хорошей. Принцип — что-то на тему емкостного нониуса, правда они там линейные, а нужно будет поворотный сделать. В большой партии должно быть очень дешево, на небольших уже не уверен.

Am0ralist
17.04.2017 12:17Lexmark'овские принтеры разбирал, видел там как раз подобную схему в купе с обычными, не шаговыми двигателями.

Leerooooy
15.04.2017 11:07+1«С камерой» и «тысяч за 50» — я вас огорчу, но камера + механика к ней будут стоить эти самые 50 тыс. Остальные материалы и работу проектировщиков как полагаю вы считаете бесплатной, то есть даром?))
На серийной железке пик-плейс дешевле 500к не будет в России, есть несколько проектов, которые это подтвердили. От конструкторов надо бежать как можно дальше, ведь эти ваши «хоббисты и небольшие компаниие» в большинстве своим имеют руки из нестандартных мест, они не осилят собрать и будут потом трубить на весь интернет какие подлые разработчики кинули их на 50 тыс.
У вас советы на уровне студента, который о реальных проектах только на хабре читал, где и 5% подводных камней люди не описывают.
AllexIn
15.04.2017 11:18+1ведь эти ваши «хоббисты и небольшие компаниие» в большинстве своим имеют руки из нестандартных мест
Как reprap то живет?
Сам собирал себе 3Д принтер, еще и паять толком не умея. Ничего, доволен.Leerooooy
15.04.2017 11:33Сравнение конструкций разного уровня, ведь в статье речь идет не о ширпотребе, а о «около-промышленном» решение. Да, конструкцию можно довести до состояния конструктора, вот только на такую «доводку» уйдет времени в 2 раза больше чем на сам проект + ресурсов достаточно много.
Железку изначально либо затачивают по готовое решение, либо под конструктор. Тогда оба пути будут выгодны, иначе попытка усидеть на 2-х стульях приведет к провалу проекта как такового.
ittakir
15.04.2017 15:07+5У вас советы на уровне сноба, который считает, что может ставить диагнозы по паре строчек текста.
По себестоимости железа разные pick'n'place машины могут сильно различаться. Кто-то делает из старого принтера, кто-то из простых линейных подшипников. Собсна, высокой точности там и не требуется. Если не пытаться расставлять мельче 0603, то даже 0.5мм может хватить. А вообще, в Pick and place машине главное это софт.
Про 500к охотно верю. Особенно, если делать это в Сколково, нанять вместо инженеров кучу менеджеров, а дизайн заказать у А. Лебедева.
KiloLeo
15.04.2017 10:29+2Картинка очень правильная. По моему опыту в инновационном проекте пересечение красной и синей линии происходит раз в 5 выше, чем изначально виделось.
Bombus
15.04.2017 10:39Вдохновляет точность топовых машин (повторяемость – 0,05мм). Как она достигается? Есть информация в открытом доступе? Полагаю, что это достигается датчиками положения. Но не понятны принципы.
ittakir
15.04.2017 10:56+1Очевидно, прецизионная механика без люфтов, плюс точные датчики положения.
Bombus
15.04.2017 12:27Про прецизионную механку действительно очевидно. Интересуют именно датчики положения, их принципы, практика. 0,05 мм в как совокупная ошибка — это высокий показатель. Использование интерферометрии?
Gryphon88
16.04.2017 22:2150 микрон на линейном перемещении не очень большая точность, если мы согласны пожертвовать или нагрузкой, или скоростью/ускорением, или дальностью перещения. Классика — BLDC+оптическая линейка. Если жертвовать ничем не хочется, но зато денег много — линейные двигатели.

feligz
15.04.2017 10:42Краудфандинг не пробовали запустить? Если бы продукт публика оценила, накидали бы денег. А потом не пробовали писать заинтересованным лицам о финансировании проекта? Я помню, что сооснователь mail.ru робототехникой занимается, может у него был бы интерес вложить деньги в проект.
giffok
15.04.2017 11:19Сначала пытались запуститься на своих деньгах.
Потом найти инвестора (не получилось — слишком ранняя стадия)
Потом начался бум краудфаундинга, но я тогда уже понял, что сроки плывут непредсказуемым образом. Это было не рациональное, а этическое решение — я решил, что не хочу брать деньги за результат, который не могу гарантировать хотя бы с 50%-ной вероятностью.
Да, Гришин вкладывается в проекты, я общался на ранних этапах проекта с представителями его фонда. Но тогда они неофициально сказали, что проект не совсем в их фокусе, но пожелали удачи и дали несколько хороших рекомендаций.

23derevo
15.04.2017 10:49«Практически полное отсутствие обратной связи» — это вообще как?
AllexIn
15.04.2017 11:20Как у простых ЧПУ или 3д принтеров.
Четко запрогарммированная последовательность действий, плюс уход в home постоянно для сброса накопившихся ошибок.
giffok
15.04.2017 11:22Есть концевые датчики — они не позволяют выйти за крайние положения по каждой из осей + их можно использовать для определения собственного положения в начале/конце цикла. Но во всех остальных случаях робот не имеет обратной связи и опирается только на число сделанных шагов.

aslepov78
15.04.2017 11:05+1У червячного же главный минус — трение, которое и понижает КПД, и изнашивает вал/шестерню. На первых порах да, будет жесткой конструкцией, потом, под нагрузкой, износ и увеличение люфта.
Говорите нашли нишу — редукторы. Вот это здорово. Сразу надо было не «руку человека» делать, а начинать с узлов, если вы уж с нуля решили узлы свои клепать. Но вообще сомнения у меня, что ваш редуктор дешевле или качественнее китайских или скажем тех что дворник на машине крутит. Вот то что он дорогой выходит — я почему то не сомневаюсь, это ведь штучное изделие?giffok
15.04.2017 11:35+1Да, износ есть. Но если нагрузки небольшие (как у нас), то он минимальный.
Второе — как выяснилось, люфт на редукторе не всегда сказывается на повторяемости выполняемых действий. Грубо говоря, под своим весом, робот выбирает его в каждом конкретном положении всегда в одну сторону.
В-третьих, можно менять материал колеса. Сейчас капролон для ненагруженных степеней свободы и оловянистая бронза для нагруженных. Можно все перевести на бронзу — но это увеличит вес верхних редукторов.
Да, похоже надо было начинать с базовых узлов. Но они не вдохновляют — вряд ли бы проект начался с них)) А вот робот как идея позволяет найти крутых людей готовых работать за очень небольшие деньги. Ну и у меня тогда не было вообще никакого опыта запуска проектов. Я прошел по всем граблям, которые только смог найти.
Ryppka
15.04.2017 11:07+3Пишу комментарий просто для того, чтобы поддержать автора. Честный и умный рассказ о реальном опыте. Именно ради таких публикаций и стоит заходить на хабр! Хочется пожелать автору всяческих успехов! Хорошо, что среди нас есть такие люди!
vsdigitall
15.04.2017 11:23Подскажите, пожалуйста, насколько увеличивается продажная стоимость робота, если использовать сервоприводы, обратную связь и планетарные редукторы?
giffok
15.04.2017 11:25Трудно сказать. Это полное перепроектирование всей конструкции с нуля
Думаю как у стандартных промышленных роботов — 1m+
Можно сэкономить на том, что просто скопируешь что-то готовое, но проиграть на отлове косяков, которые крупные производители поймали и исправили уже лет 20 назад.slog2
20.04.2017 23:13Вы посмотрите сколько стоят сервоприводы у китайцев. Цены вполне сравнимы с шаговыми двигателями, преимуществ вагон и маленькая тележка. Но! Искать надо непосредственно у китайцев, без всяких посредников. Например на алибабе. Уверен что можно найти что-то не дорогое и качественное.
AllexIn
15.04.2017 11:27ИМХО у вас слишком абстрактный вопрос.
Утверждение «нет никакой обратной связи» — оно вполне конкретное и четкое.
А утверждение «есть обратная связь» — вообще ни о чем не говорит, потому что варианты обратной связи неисчислимы.Indemsys
15.04.2017 11:32В этом контексте абсолютно ясно о чем речь.
Обратная связь по положению.AllexIn
15.04.2017 11:34Нет. Т.к. использование сервоприводов и так нам даст информацию о положении.
Indemsys
15.04.2017 11:36+1Не даст. Это будет не информация о положении, а предположение о положении.
AllexIn
15.04.2017 11:37ИМХО вы путаете шаговики и сервоприводы.
В случае шаговика у нас «предположение», потому что мы можем дать команду на шаг, но не можем проконтролировать был шаг сделан или нет.
В случае сервы — мы не только даем команду, но и считываем изменение. Никаких предположений, четкая информация.Indemsys
15.04.2017 11:39+2Я не путаю, а я и говорю только о шаговых двигателях.
В современных сервах стоят BLDC и 3-х фазные холлы.
Я сам такие проектирую и делаю.
Но наличие холлов в сервах не избавляет от необходимости иметь точный внешний датчик угла поворота. Упрощенно я называю его энкодер, хотя там все сложнее.AllexIn
15.04.2017 11:41Тогда я не понимаю вашего «В этом контексте абсолютно ясно о чем речь.».
Потому что, а давайте сделаем сервы и обратную связь — это масло маслянное в таком контексте.
Indemsys
15.04.2017 11:35+2BLDC двигатель с тем же моментом что и шаговый будет дешевле раза в полтора.
Свой разработанный магнитный энкодер с 15-и битным разрешением обойдется где нибудь в 20 Евр и меньше.
Почти в такую же цену можно сделать и индуктивный энкодер. У него разрешение будет более 16 бит.

baigudin
15.04.2017 11:41+1Ребята, у вас есть отличная инженерно-конструкторская команда. Но быть может робот — это слишком круто на сегодняшней момент? Как вам идея, реализовать что-нибудь попроще, что можно легче продавать. Например автоматическая лапомойка для собак — моя идея фикс пятилетней давности.
А вообще, статья хорошая, есть, что подчеркнуть. Я сам занимаюсь разработкой объектно-ориентированной ОСРВ и, как раз вчера, думал о роботах и возможности ее применения в робототехники. Обязательно посмотрю вашу документацию.
giffok
15.04.2017 11:41Да, периодически предложения о смене направления работ поступают))
Раньше я от них всячески уворачивался (чтобы что-то заработало, лучше концентрироваться на чем-то одном), но сейчас вы можете связаться напрямую с комадой — возможно они ответят по-другому)baigudin
15.04.2017 13:04+1Безусловно вы правы, только концентрация помогает достичь успеха. Но если идея слабо монетизируется, то, быть может, стоит посмотреть по сторонам. Мне просто кажется, что команда сделавшая такую вещь не может распасться. Лучше вы хорошенько отдохните и возвращайтесь!
LonelyCruiser
15.04.2017 11:41+1Целью проекта было создать дешевого универсального робота, имеющего возможности сопоставимые с человеческой рукой.
Давно интересуюсь этой темой и пришел к выводу, что проблема такого робота не в механике, проблема в управлении. Имея хорошее адаптивное управление со зрением, можно обойтись механикой с низкой точностью и повторяемостью (ну правда, какая точность и повторяемость у человеческой руки?). Поэтому, мне кажется, более перспективнее заниматься разработкой систем управления, чем собственно механикой.
АВВ давно этим занимается со своей Фридой:
https://www.youtube.com/watch?v=70V6J4Y8hnc
Бакстер:
https://www.youtube.com/watch?v=fCML42boO8cIndemsys
15.04.2017 11:48Еще нет математических методов для борьбы с люфтами.
Поэтому без хорошей механики чисто программно с точным управлением не справится.LonelyCruiser
15.04.2017 11:58Ну да, с управлением имеется куча прблем в т.ч. и фундаментальных.
Что касается люфтов, то у меня дома имеется небольшой настольный станочек с ЧПУ, там (MACH3) имеется средство борьбы с люфтами. Справляется хорошо.Indemsys
15.04.2017 12:07-1Понял, управляющий софт так называется — MACH3
Нет, не вижу каким образом такой софт может нивелировать люфты, это может делать только привод на двигателе.
giffok
15.04.2017 12:09+1Да, ценность человека — не в том, что у него есть руки, а в том, что у него есть голова)
Гугл идет сейчас по пути машинного обучения в управлении движением роботов. Но даже у них успех ограничен. Например, предмет из коробки берется далеко не с первого раза. В идеальной ситуации — нужен не только контроль по зрению, но и осязание.
Сейчас, мне кажется, что нужно улучшать и точность и управление.
То что мы сделали акцент на механике, обусловлено
во-первых тем, что в команде были люди, которые лучше разбираются в ней
и во-вторых, тем, что исходная цель была в максимальном снижении себестоимости конструкции, а не в повышении гибкости

Indemsys
15.04.2017 12:01У вас есть еще куча возможностей для удешевления.
Например контроллеры PLD330 можно вполне заменить своими контроллерами и разместить их прямо на двигателях. Соединить их сетью CAN или даже EtherCAT, это сейчас очень не дорого.
Уберете эти кошмарные разъемы, упростите отладку и ввод в эксплуатацию.
В том что вы выложили нет никакого намека на управляющий софт. Что вы используете для создания программы движений?Indemsys
15.04.2017 12:13А понял, по скриншоту угадывается MACH3.
Это немного странновато для робота использовать простую пошаговую программу как для станка.
А где же гибкая логика обхода препятствий или планирования траектории?giffok
15.04.2017 12:19Спасибо за рекомендации.
Да, MACH3. В основном потому, что с ним уже был опыт работы. Пока логика, действительно, прописывается достаточно жестко. Это быстро и пока подходит для демонстраций.
Разъемы были добавлены как раз для ускорения отладки. Когда что-то ломается, нужно быстро разобрать робота на части. Основная проблема обычно — разъединить провода, а потом соединить их обратно в правильном порядке.LonelyCruiser
15.04.2017 12:41+1ROS рассматривали?
giffok
15.04.2017 14:47Нет. Пока наш робот, с точки зрения управления, ближе к ЧПУ станку, чем к роботу.
Как по причине «так исторически сложилось», так и просто потому, что больше компетенций в этой области.

raacer
15.04.2017 14:48+1Предпринимателями не рождаются, предпринимателями становятся. Это такая же специальность, как и любая профессия, и ей нужно долго и упорно учиться: как теории (читать книги, написанные другими предпринимателями), так и на практике (пробовать запустить один проект, другой проект, третий проект).
Предпринимателем может стать любой человек: и экстраверт, и интроверт, и холерик, и флегматик. Как и в любом деле, должна быть мотивация. Чтобы заниматься бизнесом, нужна прежде всего мотивация заниматься бизнесом. Увлечение роботами этому не мешает, но и не особо помогает: это лишь даёт возможность выбрать направление для бизнеса, в котором вы наиболее компетентны.

Gradarius
15.04.2017 15:00Первая мысль — это бред, для фастфудов делать подобное. Но прочитал, посмотрел, а ведь у этого есть будущее. Тут конечно не один год работы, но будущее есть определенно.
Siberianice
15.04.2017 15:01Сложность этого проекта в его универсальности.
Разработка под конкретную задачу тянет за собой первичный дизайн и уже потом возможны его модификации.
Почему не удалось зацепиться за тему тестирования детонаторов и перекроить все под это?giffok
15.04.2017 15:06+1Да, затачивая проект под одного потребителя снижаешь риски, но, при этом, в данном случае, сужаешь рынок до со стояния «конструкция такой сложности для этого заказчика в любом случае не окупится». Можно было сделать что-то с нуля под потребности конкретного заказчика, но мы решили не отвлекаться.
ProLimit
15.04.2017 15:04+2И правильно сделали, что завершили проект. У вас же с самого начала выбран неверное техническое решение: шаговики и никакой обратной связи. Это очень ограничивает области применения. Не будет инверсной кинематики, его нужно будет программировать как ЧПУ-станок. Это значит, нужен техник для его настройки, притом неслабого уровня. Когда рынок наводнят более удобные и недорогие китайские роботы, которые сможет настроить не-специалист, ваш менее удобный останется за бортом. Ну и про безопасность нельзя забывать — обратная связь частично решает эту проблему. Ваш пока маленький и медленный, но ведь потом захочется масштабировать проект в сторону повышения мощности.
Кстати, скорость уж очень низкая. Простая арифметика — сделайте его в 3 раза быстрее, и для бизнеса он станет в 3 раза привлекательней, пусть даже и стоить будет в 2-3 раза дороже, чем сейчас.giffok
15.04.2017 15:12+1Почему не будет обратной кинематики? Если прямые матрицы есть (а они есть) — посчитать обратные не сложно. Мы в какой-то момент даже это сделали, но, из-за недостатка времени, не зашили в софт. В принципе, можно задавать начальную и конечную точку в декартовой системе координат + 3 вращательные степени свободы, а не по числу шагов или углам.
Скорость на видео ограничена по соображениям безопасности (там рядом много детей было).
Однако серьезно навредить робот не сможет в любом случае — даже с учетом редукторов он достаточно слабый. Можно остановить движение сильно нажав на плечо + рядом была кнопка аварийной остановки.ProLimit
15.04.2017 19:55+1Под инверсной кинематикой я подразумевал программирование робота путем перемещения исполнительного механизма руками. Т.е. человек, например, хочет разложить конфеты из подающего устройства по коробочкм. Он берет захват робота (при этом робот обеспечивает нулевой вес захвата и нулевое сопротивление), проводит все манипуляции. Робот все это записывает, раскладывает по моторам (инверная кинематика), и потом остается только немного доработать прогрмму в интерфейсе. По моему это самый простой и понятный механизм программирования.
Насчет безопасности — именно это и имею ввиду. Сейчас он безопасен, но когда вы начнете наращивать мощность в новых моделях, ограничения технологи проявят себя. Приводы с точным контролем усилия на моторах с векторным управлением, могут легко почуствовать, что то -то идет не так, и остановить программу.ProLimit
15.04.2017 19:58+1К примеру, прогоняем тестовый процесс. Робот запоминаем, какие усилия нужны были на каждом этапе программы, например вес коробки был 1Кг, для его удержания и преодоление инерции при движении нужно было X момента на каждом моторе. Как только момент выходит за норму — значит, что-то идет не так. Т.е. при правильном выборе привода — достаточно простая получается система безопасности.
giffok
15.04.2017 20:58+1Да, с инверсной кинематикой в этом смысле есть проблемы. Такая возможность вообще не закладывалась в исходном проекте.
Но, когда было обсуждение — как именно можно добиться того же эффекта, как планы на будущее, была идея за 10$ купить на алиэкспресе лист с тачскрином и обернуть/наклеить его на все поверхности, за которые робота хотим взять и тянуть в нужную нам сторону.
Второй путь — управлять роботом с джойстика о игровой приставки. обычно 20 минут достаточно чтобы научиться сносно управлять. А за три дня появляется мышечная память как от езды на велосипеде.
Так что это не то, чтобы совсем критичное ограничение.

StriganovSergey
15.04.2017 15:06+51 — Многие моменты, которые я прочитал в статье — самоочевидны с самого начала.
Например, тот же вопрос надежности и ремонтопригодности не должен всплывать «вдруг» после запуска продаж, а должен прорабатываться заранее. При разработке создаются испытательные стенды, на которых проверяются экстремальные и нормальные режимы работы.
2 — Суммы, названные в статье, конечно же «ни о чем».
На передовые разработки люди тратят огромные деньги, и не всегда это приносит прибыль.
«было списано, как потери, приблизительно 3,6 млрд. долларов в 2015 году, что, примерно, вдвое больше потерь предыдущего 2014 года.»
3 — уже писали в комментах, и я повторю — нужно самому попробовать стать потребителем этой продукции.
Придумать применение, может быть на применении заработать можно больше, чем на производстве?
4 — С технической точки зрения, я не верю в системы, которые не имеют функций самоконтроля и коррекции ошибок. (Это не только про железо, но и про обычное ПО — тоже).
5 — И самое главное — а почему Вы решили именно этим заняться?
Что из своих личных умений и навыков Вы хотели вложить в этот проект?
Вы имеете квалификацию инженера-конструктора и решили, что недостаточно реализуете все свои умения в обычной наемной работе?
Или Вы продажник, который снег в Сибири продать может?
Кто у Вас Стив Возняк (инженер от бога), а кто Джобс (одержимый, беспринципный и наглый делец)?
«я решил, что не хочу брать деньги за результат, который не могу гарантировать»
Тревожный сигнал, если заявка на Джобса.
6 — РФ — не для стартапов, тем более производственных. Производство здесь занимается выживанием. (Это, кстати, тоже самоочевидная вещь, поэтому входит в пункт 1, но я подчеркну эту мысль здесь отдельно).
Если, конечно у Вас нет выходов на попил бюджета.
7 — в комментах я уже прочитал: «Я прошел по всем граблям, которые только смог найти.»
Это да, видно. Осталось разобраться с полученным опытом. Что с ним делать. Понять себя и мир :)raacer
15.04.2017 15:14Вы три года молчали, и эта статья так зацепила Вас, что сподвигла написать первый комментарий? :)
Если эта тема так близка Вам, может быть поделитесь мыслями, как нужно делать начинающим предпринимателям, чтобы не попасть в просак?StriganovSergey
15.04.2017 15:54+3raacer, Если действительно интересно — то пару слов о себе:
я около 10 лет занимался разработкой, производством и продажей электронных устройств,
и примерно, в 2002 году уже закончил с этим. При этом у меня квалификация радиомонтажника,
и довольно неплохой практический опыт продажника. Так что все это мое производство возникло не случайно, не «вдруг» на пустом месте. В свое время осознав перспективы производственного бизнеса здесь — закончил с этим.
Теперь же, я обычный наемный офисный работник (программист).
Вот, недавно узнал, что разрешили комментировать не имея публикаций.
(Мои рабочие программные проекты закрыты, а личные наработки в виде статей публиковать — никак не решаюсь пока).
В бизнес, может быть еще вернусь. (лет через 5)
Вот такой я зануда, уже пожалели, что спросили? :)
Как нужно делать начинающим:
собственно, с ответа на вопрос 5 — только честно, себе.
На основе каких личных данных (образрования, квалификаций, черт характера) можно рассчитывать на успех.raacer
15.04.2017 16:07Спасибо :) Конечно, совсем не то, что хотелось бы услышать, но тоже интересно и познавательно.
ittakir
15.04.2017 16:20-2Почему «РФ — не для стартапов, тем более производственных»?
Кроме отсутствия в РФ умных людей не могу как-то это объяснить.
galamix
15.04.2017 22:036 — РФ — не для стартапов, тем более производственных. Производство здесь занимается выживанием. (Это, кстати, тоже самоочевидная вещь, поэтому входит в пункт 1, но я подчеркну эту мысль здесь отдельно).
Если, конечно у Вас нет выходов на попил бюджета.
6В — РФ — ситуация сильно изменилась :) — а можно вас пригласить в проект? Нам нужны спецы.
Мы даже подавались во ФРИИ и наш проект успешно прошел во второй тур — очень уж оказался востребованным конкретными лицами. Но, нас сняли за отсутствие прототипа. И это дело поправимое. Нам так и сказали, «сделайте поскорее прототип и мы вас ждем обратно».
Vjatcheslav3345
15.04.2017 16:04Есть пара вопросов к автору публикации:
- Почему основой для разработки не стал дельта-робот?
- Дельта-роботов активно применяют на пищевых производствах для укладки продукта в упаковку или компоновки частей продукта. С предпринимательской точки зрения важно выяснить, почему нижняя граница применимости этих машин — небольшая фабрика а всевозможные пункты быстрого питания их не используют. Вопрос: стали бы Вы выяснять — почему ситуация такова, какова она есть сейчас?
giffok
15.04.2017 17:04Исходная идея была в том, чтобы сделать универсальную «руку» и заточить ее под одну узкую нишу (например, приготовление еды) и затем двигаться вовне, захватывая новые области, где робот может оказаться полезен. Дельта-роботы, имеют относительно маленькую зону охвата (нельзя взять предмет лежащий далеко)
+
они не универсальны в том смысле, что с их помощью нельзя передать любое движение (ну например, оладушек на сковородке они не перевернут)
+
у них сложный расчет кинематики. в самом начале проекта мы бы такое не потянули.
potan
15.04.2017 19:14С расчетом кинематики справится почти любая библиотека удовлетворения ограничений, Это не должно быть проблемой.
aliko
15.04.2017 20:09Если хотите чтобы робот безопасно работал в неструктурированной среде, а уж тем более рядом с людьми, то без датчиков угла и моментов уж никак не обойтись с реализованными поверх силовым или импедансным управлением и опредлением столкновений. А еще лучше в навесок иметь пассивную безопасность в виде эластичных сочленений (желательно с регулируемой элестичностью). В итоге такие решения получаются минимум на 1 — 2 порядка дороже заявленной вами планки. И принятые технические решения в виде червячного редуктора и шагового двигателя без датчика угла наврядли будут масштабироваться в эту сторону.
giffok
15.04.2017 20:14+1На данный момент робот относительно безопасен — он слишком слабый, чтобы кому-то причинить существенный вред (можно остановить движение сильным нажатием руки) + есть большая красная кнопка аварийного останова. В будущем было бы проще, как предлагали в других ветках обсуждения, следить за роботом с камеры и останавливать его при любом постороннем движении. Не идеальное решение, но вполне приемлемое.
ps извиняюсь, что отклонил предыдущий ваш комментарий. он был хороший и по делу. я не на ту кнопку случайно нажал

MxMaks
15.04.2017 19:17-3Я бы хотел робота сварщика на дачу… приходится, что надо подварить детали но самому гробить здоровье желания нет.
kushnirenko
15.04.2017 20:20+1Спасибо автору за труд, честные комментарии и документацию! Может Вам объединить это в какое то руководство для начинающего предпринимателя любителя робототехники? Мне кажется вокруг этого может вырасти сообщество, может следующие наступят не на все грабли.
Не спешите с оценкой, может действительно отдохнуть и взглянуть на ситуацию месяца через три-четыре. Защитная реакция организма на изматывающие нагрузки состоит в том, что он выключает интерес к работе.
Можете дать комментарий какая система позиционирования была бы Вам интересна, чтобы включить обратную связь в проект?giffok
15.04.2017 20:27Не совсем понял формулировку «какая система позиционирования». Из каких вариантов выбирать?)
И, в любом случае, на данный момент я не в проекте. Вы можете сделать форк этой конструкции под свои пожелания или присоедениться к моим бывшим коллегам. Но сам я не могу сейчас это решать.
По поводу руководства — я не уверен, что оно будет ценным. Это, на данный момент единственный мой проект, который я пытался превратить в бизнес. Для написания руководства нужна статистика, набранная на своем или чужом опыте. Мне кажется, что, в противном случае, эти рекомендации будут очень субъективными.
Но если давать мою оценку — в проекте было две части — техническая и коммерческая. Если рассматривать по отдельности первую и вторую, по каждой есть огромное количество прекрасных статей, которые в общем-то говорят похожие вещи. Вероятно они правильные))
galamix
15.04.2017 20:28-4Уважаемый giffok!
У нас тоже стартап и мы разработали свой продукт под конкретные запросы заказчиков — ERP система
Вроде пока все гладко и продукт растет.
Появились знания, которые затрагивают смежные системы — а именно, автономные роботы
В связи с последним, у меня есть ряд вопросов, чтобы понять глубже проблему и не повторять ошибок:
1) Была ли фокус группа, делали ли вы опрос/анкетирование? Какие «боли» решает ваш продукт?
2) Для анализа рынка подходит даже прототип и после выявления рынка, остается только оптимизация. Проходили ли вы этот этап? Если да, то какой был результат?
3) Сколько человек было в команде и какие ответственности они закрывали?
4) На что в основном вы потратили 4 млн.? (комплектующие не могут так дорого стоить, а автономность робо-руки не имеет сложной логики. У квадропода куда сложнее и тоже не является чем-то сверх сложным)
5) Почему такой большой срок? Были ли четкая концепция изначально?
Спасибо заранее за ответ!giffok
15.04.2017 20:46+11. нет, не делали. Обратная связь была в форме запросов от потенциальных покупателей «я хочу купить для…. а ваш робот может это делать?» и мы примерно понимали что нужно человеку и что нам не хватает.
2. Первое столкновение с рынком — выставление робота на выставке. Результат — оптимизация под требования реального мира все еще продолжается)
3. На разных этапах — от 3 до 8. Два человека были источником денег/участвовали в управлении/решали оргвопросы типа аренды помещения и налогов/общались с внешним миром, но практически не выполняли никаких работ руками. Остальные — технические специалисты непосредственно работающие над проектом (параллельно с учебой или работой на основном для них месте работы). Среди них было внутреннее распределение ролей, но, в первом приближении, каждый знал работу каждого. Ближе к концу в проекте выделился участник, который специализировался на переговорах с внешними партнерами и продажах.
4. половина — минимальные зарплаты людям. вторая часть — практически исключительно покупка/изготовление деталей. Точную разбивку смогу скинуть ближе к вечеру. Но я не согласен, что квадрокоптеры сложнее роборук, у них акценты на разных вещах. Механика, если стремиться делать ее качественной — определенно дороже, электроника работает с более высокими токами. Сравнивать сложность начинки и управления я не берусь. Но, как минимум, ценообразование на рынке показывает, что роборуку сделать не проще, чем квадракоптер.
5. Да, концепция была такой изначально. Акцент был и на максимально низкой цене конструкции и на приготовлении еды как первом пункте и на возможности дальнейшего расширения в другие области. Я не могу корректно оценить причины столь долгого срока. Одна из возможных причин — несмотря на ежедневную работу, ни для кого из участников проекта это не было основным местом работы фултайм. Вторая — ограничения на ежемесяный бюджет, из-за которых, в некоторых случаях, приходилось выбирать более долгие, но более дешевые решения. Третья — реальная техническая сложность проекта. Время одной итерации по исправлению ошибок достаточно велико.
Idot
15.04.2017 21:12+2я решил, что не хочу брать деньги за результат, который не могу гарантировать
При таком подходе, Ваш продукт рискует превратиться в долгострой, который рискует оказаться опоздавшим к "разделу пирога" — сам "пирог", случае опоздания, поделят крупные корпорации, а оставшиеся крошки подберут всякие noname-производители.
galamix
15.04.2017 21:49Я понимаю, почему мои вопросы получили отрицательную оценку. Дело в том, что на хабре в основном технари, а стартаперы больше на Spark, VC.ru и иже с ними.
Совсем не с проста задал все вопросы, так как из ваших описаний видно, что вы допустили почти все возможные ошибки стартапов и считаю, что вам не стоит бросать вашу затею, а просто узнать по больше о стартапах. Исправить недочеты и изменить тактику.
Шикарная книга на эту тему, очень рекомендую — «Эрик Рис. «Бизнес с нуля. Метод Lean Startup». Полагаю, прочитав ее, вы переосмыслите свое предприятие и найдете все ошибки.
Не буду все их перечислять но вот одна, как раз на ваш ответ:
1. нет, не делали. Обратная связь была в форме запросов от потенциальных покупателей «я хочу купить для…. а ваш робот может это делать?» и мы примерно понимали что нужно человеку и что нам не хватает.
Как раз в этой книге, хорошо описывается этот момент, а ниже привожу выдержу из книги:
Настоящая история IMVU началась позже – и не с наших блестящих предположений, стратегий и хитроумных рассуждений, а с попыток выяснить, чего на самом деле хотят пользователи, и корректировки нашего продукта и стратегии удовлетворения их потребностей. Мы пришли к выводу, что нужно объединить наше видение с тем, чего хотят клиенты, а не ориентироваться на то, что они говорят о своих желаниях, и не рассказывать им, чего они должны хотеть.
Ответы, на остальные ваши комментарии, вы так же найдете в книге.
Там даже идет речь о тех ваших страхах, о которых вы писали:
Продаж именно робота нет. Не из-за того, что спроса нет, а из-за того, что я не готов был делать продажи конструкции, которая была объективно не готова к замене труда человека на достаточно качественном уровне.
Но есть другой подход, не предлагайте устройство с завышенными требованиями. Найдутся и те, кому подойдет устройство из го-на и палок, но чтобы оно решало их проблему и „боль“. На этом этапе, можно и занизить стоимость, предложить как экспериментальную модель, проанализировать проблемы изнутри. Наладив обратную связь, вы получили бы полную картину и ответы на многие вопросы, типа — »А нужна ли такая точность, за которой вы так гнались".
Проделав такой громадный путь, я считаю это не дело. Пересмотрите свои взгляды.
В каких то вопросах, я даже объединился с вами касательно, уже нашего проекта с автономными роботами. У вас уже есть хороший опыт, пусть даже и негативный. Именно этот опыт важнее всего, а не тот, который мог быть успешен.
В любом случае, не сдавайтесь. Я в вас верю.giffok
15.04.2017 22:54Я читал про lean startup и вообще нежно люблю всевозможные lean методологии. Местами удавалось использовать, но полное соответствие им, как ни странно, довольно трудозатратно.
Прототип, в котором работает хоть что-то — уже само по себе трудно. Минимальный жизнеспособный прототип — еще сложнее. Не очень точно, но из предварительных бесед с потенциальными покупателями мы представляем где тот рубеж, который нужно пересечь, чтобы продать робота хоть кому-то. Мы можем отключить две степени свободы и выкинуть лишние детали. Можем отказаться от покраски робота. Сделать некоторые детали хуже, чем возможно. Но все равно, есть какой-то порог, ниже которого не получится опустится. И пока ты не достиг его — новые раунды переговоров с потенциальными пользователями не дадут ничего нового.
— «Вы можете сделать вот это? мне нужно именно оно»
— «Да. Месяца через два.»
— «О, круто. Ну как сделаете — приходите, опять обсудим»
А потом эти пара месяцев растягиваются на полгода минимум.
Мы пытались быть гибкими — продажа редукторов (составных частей робота) как раз про это. Pivot и все такое. Были ли мы хороши как продажники при этом? Нет, полагаю. Было много вещей, которые мы не сделали. Но умение продавать — это навык, который так же требует развития.
Ну и сколько бы мы не желали быть гибкими, всегда есть инерция предшествующего пути развития, особенно в хардверных проектах. Не удастся посидеть ночь над кодом и к утру все исправить. Изменение конструкции требует времени, особенно если тебе нужно изменить чертежи, найти нового человека, который по ним изготовит, купить материал, доставить на производство, подождать исполнения, доставить деталь до места, где будет происходить сборка, понять что одно отверстие мастер сделал на 0,3 мм левее,…
Я согласен, что методология прекрасна. Но знание не всегда эквивалентно возможности следовать.
Вторая ветка этого обсуждения — могли бы мы выбросить робота и сделать что-то кардинально более простое и скучное, что удовлетворит потребности конкретного клиента? Возможно. Но энтузиазм по поводу того, что ты делаешь что-то крутое — неотъемлемая часть проекта. Она не учитывается методологией, но именно она позволила потратить так мало денег на зарплату людей. Реальная рыночная стоимость специалистов, которые работали на проекте, как минимум, раз в пять выше и не факт, что даже за такие деньги они бы решили к нам присоединиться.lomalkin
16.04.2017 18:58+1— «Вы можете сделать вот это? мне нужно именно оно»
— «Да. Месяца через два.»
— «О, круто. Ну как сделаете — приходите, опять обсудим»
А потом эти пара месяцев растягиваются на полгода минимум.
Я думаю, что имеет смысл делать более короткие промежуточные итерации, чтобы чаще взаимодействовать с клиентом. Т.е. конкретно в этом кейсе предлагаю называть не 2 месяца, а 3 недели и показать им «почти то, что нужно», но раньше. Возможно это звучит глупо, т.к. гибкие методики неприменимы напрямую к хардварным проектам, точнее просто целые итерации тут всегда длиннее, чем хочется. Но у вас же на этом этапе не серийное производство, поэтому часто есть возможность сделать промежуточную итерацию вида «на соплях, но почти так, как нужно» и лишний раз протестировать решение в боевых условиях, а к следующей полноценной итерации внести правки, уже с учетом обнаруженных проблем. Такое более тесное взаимодействие с клиентом позволит добавить еще больше ценности в и так долгую итерацию, а значит сделать ее «дешевле» для вас. Да, это не всегда просто организационно и технически (и обещать такое неприятно, но перфекционизм — большое зло), но это гораздо выгоднее в итоге для всех. Надеюсь, что смог передать основную мысль.
P.S. В любом случае желаю вам удачи, в этом проекте или нет. В целом вы мыслите в правильном направлении. И обязательно отдохните!
giffok
15.04.2017 23:11Пожалуй, уточню свое утверждение про «спрос был, но мы не продавали». Спрос был, но мы не продавали, т.к. я знал, что первая поломка будет меньше, чем через сутки. Это выльется в огорченного клиента, и доп затраты на техподдержку, которых можно было бы избежать. Т.е. да, мы бы робота продали. Но потом получили бы убыток в два раза больше.
lonelymyp
15.04.2017 22:14+1Неужели экономия на энкодерах ощутимо повлияла на цену конструкции?
Магнитный энкодер AS5047P даёт 4000 шагов на оборот и стоит всего 500 р.
А для простого контроля пропуска шагов достаточно и более дешевых, типа AS5040, в случае сигнала с энкодера можно будет поставить операцию на паузу и перекалибровать нужную ось.giffok
15.04.2017 22:20Спасибо за вариант.
Я не помню подробностей, но там выходило что-то вроде 10к на одну ось, причем разрешение было хуже, чем несколько градусов. Возможно это были реалии рынка несколько лет назад (когда алиэкспресс еще не пришел в россию, а многие компании работали только с юриками) или мы как-то неправильно искали. Но исходили мы именно из предпосылки, что это очень существенный плюс к цене, а необходимую точность все еще не обеспечивает.the_turkale_cat
17.04.2017 08:57Да шаговый сам по себе энкодер, как вы не понимаете? У него магнитное сопротивление меняется при повороте ротора. С него просто считывать никто не хочет, ибо не нужно в основной массе своей.
Да и если нужен отдельный энкодер, при наличии норм. механического производства можно сделать магнитный прям встроенный в червячный редуктор.Gryphon88
17.04.2017 13:02А можно поподробнее? Для BLDC измерение положения по самоиндукции видел, вот для шаговика, на 200 шагов, с микрошагом и на полной скорости — нет.
the_turkale_cat
17.04.2017 17:31Спасибо, что про BLDC напомнили. Там положение ротора можно оценить по изменению индуктивности от подмагничивания магнитной системы соответствующего полюса (выход магнитного материала на более пологий участок зависимости B/H), современные же шаговые двигатели суть двигатели с переменным магнитным сопротивлением с подмагничиванием магнитной системы, т.е. у них есть явная зависимость немагнитных зазоров по фазам от угла поворота ротора — как следствие явная и воспроизводимая зависимость индуктивности обмоток от расположения зубцов статора и ротора друг относительно друга.
Почему об этом не пишут? Да потому, что это никому не нужно, поскольку обычно ШД применяются как раз для того, чтобы уйти от ОС по положению.Gryphon88
17.04.2017 18:09Без обратной связи ничего хорошо не работает, даже линейные двигатели… Сейчас тренд к преращению отрицания обратной связи, всё-таки инваровые ШВП дороговаты :)
Почему об этом не пишут?
Можете скинуть ссылку на how-to, чтобы при вращении с нормальной скоростью (50+rps) контроллер успевал просчитывать? Если мы используем микрошаг, то ротор у нас находится между магнитами статора, сдвинувшись не точно на N*микрошаг, а с какой-то ошибкой, и при этом ещё и осцилирует, а не стоит, как вкопанный. При завершении полного шага самоцентрируется, но лично мне гораздо интереснее, насколько точно был сделан каждый микрошаг.the_turkale_cat
17.04.2017 22:55Да полно процессов в жизни идёт практически без обратной связи; насколько «хорошо» или «плохо» работает устройство — зависит от того, насколько реализация устройства соответствует области его применения. Можно поставить ШД с запасом по моменту раз в 10 и наплевать на обратную связь по положению, а можно поставить хилые привода, механику с огромными люфтами и в конце датчик обратной связи, завести его на примитивный регулятор и наслаждаться трясучкой всей системы.
На how-to ссылок не скину, ибо я уже писал, что никто этим не занимался ибо практически оно по понятным причинам не надо.
Мои же мысли о реализации таковы — начать нужно с измерения индуктивностей обмоток во время работы двигателя. Далее вычисленная индуктивность сравнивается со средней индуктивностью фазы и исходя из этого формируется квадратурная пара сигналов, которая несёт информацию об изменении угла поворота вала. Это позволит хотя бы контролировать пропуск шага. Про ОС по положению ничего сказать не могу, здесь нужно детально и серьёзно заниматься.Gryphon88
18.04.2017 13:16Ну… Я знаю людей, которые этим занимаются последние полгода, и пока продукт не готов. ОС по положению ротора нужна для снижения цены механики, плюс нельзя просто взять и поставить движок с запасом по моменту: станкостроение, вакуумные приборы, научные приборы.
the_turkale_cat
19.04.2017 06:13«Этим» — ОС по положению в ШД без использования внешних датчиков?
А почему нельзя поставить ШД с запасом по моменту?Gryphon88
19.04.2017 12:38Этим — ОС по положению ротора, по аналогии с самоиндукцией BLDC.
ШД с запасом по моменту — это дополнительные вес и тепло. Тепло — это грусть и печаль для вакуума, а вес важен для многоосных систем, типа такой: если мотор с валом подвижны, требуется усиление конструкции, что опять же её удорожает. Конечно, всегда можно выкрутиться, но проще поставить энкодер(ы) и микроконтроллер типа ARM3/ARM4F, а если использем для контроля камеру или интерферометр, то ARM7.
grossws
19.04.2017 15:30ARM3/ARM4F
Где вы в современном мире нашли контроллеры на ARM3 (архитектура ARMv2a, если что)? Что такое ARM4F — вообще без понятия.
Но судя по упоминанию ARM4F и ARM7 вы путаете ARM7/ARM7TDMI (ARMv3/ARMv4T) и современные ARM Cortex-M3, Cortex-M4F/M7 (ARMv7-M, ARMv7E-M).
galamix
15.04.2017 23:01Класс!
The AS5047P is a high-resolution rotary position sensor for highspeed (up to 28krpm) angle measurement over a full 360 degree range. This new position sensor is equipped with revolutionary integrated dynamic angle error compensation (DAEC™) with almost 0 latency and offers a robust design that suppresses the influence of any homogenous external stray magnetic field
практически с 0 задержкой
подавляет влияние внешних паразитных магнитных полей
Возьму на заметку.

x15
15.04.2017 23:13Когда открывал статью, надежд на годноту было маловато. А тут такое!
Несколько вопросов:
1) Почему чертежи в общий доступ? Это больше эмоциональное или рациональное решение?
2) Какой станочный парк искать? Насколько квалифицированный токарь (разряд?) необходим? Думаю это важно тем у кого блеснула мысль адаптировать под свои нужды разработку.
3) В тексте обозначена грузоподъемность до 5 кг. Этого показателя удалось добиться?
4) Первая идея по применению – замена человеческих рук в опасных зонах. Например, вытащить тигель с расплавленным металлом из печи и залить в форму. Или подставлять детали под пресс/штамп. Думали в подобном направлении?
Ещё раз повторюсь, что крайне приятно удивлен решением сделать столько ценный труд общедоступным. Из 10 000 прочитавших лишь 1 попытается реально что-то повторить, но хочется верить, что такой человек найдется.
giffok
15.04.2017 23:36+11. У меня есть опасение, что без меня проект умрет. Я подождал примерно полгода, продолжая финансирование, чтобы снизить риски этого, но по-прежднему шансы на неблагоприятный исход есть. Как бы ни был силен энтузиазм, деньги на продолжение нужны всегда и без них все будет тихо замедляться, пока не остановится. Если после этого чертежи исчезнут — получится, что все усилия потрачены зря. Если я заберу их себе и никому не покажу — я ничего не выиграю. Поэтому я решил приложить небольшие усилия, консолидировать информацию и выложить ее в открытый доступ. Также я надеюсь, что это мотивирует новых людей присоединиться к проекту или создать свой, т.е. снизит риски смерти проекта. Так что мотивы чисто эмоциональные (не хочу, чтобы работа пропала), но решение рационально.
2. Хороший вопрос)) Честно — я не знаю точно. Было большое число исполнителей, с, как минимум, 5 разных производств, 2 из которых — закрытые военные, причем исполнители периодически менялись. Одни хорошо и быстро делают токарные операции, у других — крутой ЧПУ станок. У нас не было под рукой зубофрезерного станка, но на третьем согласились сделать доработку к токарному станку, чтобы резать на нем червячные колеса метчиком (да, у нас было очень много экзотики к месту и нет). Думаю лучше уточнить у людей, чьи контакты есть по ссылке в конце статьи. У них есть информация из самых первых рук.
3. На реальных роботах — нет. На тестовых образцах — вроде получалось. Присоской как на видео много не поднимешь. Но, вроде бы, примотанная скотчем пара килограмм на вытянутой руке поднимались.
4. Робот планировался как универсальный механизм. Если характеристики позволяют — почему бы не использовать его в этой области. Но нет, специально не планировали
qwertyhp
16.04.2017 02:34+2Программа управления не всегда корректно
Напишите свою. Минимализм функционала будет компенсирован возможностью оперативно вносить в нее изменения.
Провода могут перетираться и коротить друг друга
Погрузите их в силиконовую смазку.
Исходной целью проекта было сделать «почти промышленного робота» по как можно более низкой цене.
На мой взгляд, следовало бы сделать экземпляр того, что вам самим будет безусловно нравиться, вне зависимости от его стоимости — а уже после этого удешевлять конструкцию. Зато на пилотном экземпляре вы обкатаете концепции управления и технические решения. Подозреваю, что стремление сразу сделать максимально дешевого робота только сделало проект дороже, а его перспективы — малопонятнее. Собственно, почему Вы от него и отмежевались.
новая технология… вызывает взрыв инноваций и меняет сам рынок.
Слишком глобально. Предположу, что вы хотели побыстрее попасть на малоосвоенный рынок, стать на нем вне [ценовой] конкуренции. Но тогда следовало бы учитывать слишком многое, — например, стоимость производства и возможности самогО производства Китая, а так же — их склонность к копированию…
В этом проекте мы пытались снизить себестоимость и шли на все ради этого…
У Вас лейтмотивом проходит мысль удешевления конструкции. Но нельзя удешевить то, что не имеет конечного воплощения… Возможно, вам следовало бы ориентироваться не на продажу — а на сдачу в аренду ваших манипуляторов, с гарантией удаленного исправления и обновления алгоритмов, и апгрейда механики.
… что исходная цель была в максимальном снижении себестоимости конструкции, а не в повышении гибкости...
имеющего возможности сопоставимые с человеческой рукой
Это называется ПРОТЕЗ. То, что шевелится на видео, не имеет к руке никакого отношения. Если бы элементы гамбургера были бы настоящими продуктами — пористыми, влажными, скользкими и гибкими — то манипулятор просто бы их ронял, а его присоска была бы постоянно жирной, влажной и скользкой.
Да, знаю, я повторяюсь. Я просто размышляю.
Знаете, на самом деле вам следовало бы решить, чего вы действительно хотите: если создать универсальный аналог руки — то это протезирование, и все не так просто и со стороны механики, и со стороны алгоритмов.
Если же заместить некие технологические процессы в производстве — тогда имеет смысл подумать и об изменении самогО рабочего места, которое изначально и по-определению заточено под человека.
Для позиционирования можно использовать не только энкодеры, но и гироскопы: стоимость копеечная, а эффект ощутимый.
Принципиальная разница между сервой и шаговиком в том, что шаговик обеспечит принципиально большую точность позиционирования и дробность шага в сравнении с сервой, обратная связь у которой будет точной только у достаточно дорогих моделей. Но серва при сопоставимой цене обеспечит бОльшее усилие на валу…
А вообще — очень интересное и поучительное обсуждение. Спасибо.giffok
16.04.2017 10:40Напишите свою. Минимализм функционала будет компенсирован возможностью оперативно вносить в нее изменения.
мы пытались писать что-то свое с управлением движками от микроконтроллера. Один двигатель — ок. Хотя пришлось потратить много времени на плавный разгон/торможение.
Много двигателей — сложно, особенно если их нужно ускорять/разгонять несинхронно. Работа со встроенными таймерами, прерывания, частота достаточная, чтобы выдавать сигнал нужной формы, все такое. Я не в курсе всех технических сложностей (и, похоже, смешиваю два слоя технологических проблем), но в какой-то момент разработчик сказал, что он отказывается от этой ветки, которую он делал месяца два и переходит на управление двигателями стандартной программой и вообще лучше делать управление роботом как станком с ЧПУ.

SADKO
16.04.2017 12:21+3Великолепная история, только доказывающая предпринимательский склад автора, иначе не было бы и истории… (и в конце концов черви и планетарки продаются, европейский опыт нам как бы намекает что продавать отдельные узлы тоже не так уж и плохо)
… вполне возможно что на более простом поприще автора бы ждал успех, но не там где требуется множество компетенции.
Рынок роботов сложился таким каким он сложился не просто так, и технические решения применяемые в промышленных роботах устоялись не только в силу исторических причин…
Кроме того, есть ещё рынок бу-шных роботов, и наиболее интересные покупатели смотрят как раз туда, и не только по причине цены.
В общем всё очень грустно, тем более что рука на шаговиках — детская мечта, и ей действительно бы нашлось место в реальном мире, где не нужна особая скорость и обратную связь делает машинное зрение, НО оно доступно лишь заказчикам которые не будут экономить на руках :-(
Задача точности управления шаговиками, тоже решаема (а я бы даже сказал легко решаема, опытным разработчиком), в том числе и очень качественно, но стоимость такого решения начинается от полутора стоимости всего проекта.

atemik
19.04.2017 08:39Меня вот эти «возможности сопоставимые с человеческой рукой» очень доставили. Человеческая рука имеет «так себе» двигатели, но примерно хулиард разнообразных датчиков на соприкосновение и плюс обычно ещё визуальный контроль. Вот точность её — можете у бывалых алкоголиков поспрошать. Тем не менее справляются с разными нетривиальными задачами, даже при наличии очень немаленьких помех в управлении :)
Может главная ошибка была в «отсутствии обратной связи»? Много примитивных датчиков и довольно грубые движки — не рассматривали? Может именно тут должен быть прорыв?giffok
19.04.2017 08:43Возможно. Но реализовать такой сценарий значительно сложнее технически. И уж точно, не дешево. Хотя он стремительно дешевеет со временем.
Am0ralist
19.04.2017 10:11+1Вот только обратная связь через датчики у людей так себе, скорость реакции — не ахти, система достаточно инертная. Больше зрительный контроль помогает в момент обучения, особенно контроль результатов.
Для примера, сравните как нарезают что-нибудь повара, там такая скорость, что человеческая ОС будет только по факту, что пальчик уже три раза стал короче, а при этом они еще даже могут не смотреть.

TomasHuk
19.04.2017 12:47Не хочу вас расстраивать, но ваша роботизированная рука в фастфуде не сработала бы. По крайней мере в ближайшие лет 10-20-30.
Посмотрите, как готовят в маке, например.
Чтобы сделать свежеприготовленный качественный и горячий сэндвич, нужно минимум гриль, тостер и стол с начинкой. Ну и человек. Все это находится в разных местах, хотя и близко друг к другу. Поднос с сэндвичами проходит путь «тостер-стол заправки-гриль-стол упаковки». И на всех этих точках нужна будет своя рука. Кроме всего существуют сотня нюансов, возникающие при приготовлении, которые трудно предугадать. Так что людей в фастфуде еще не скоро заменят.
Да, можно придумать роботизированную линию с конвейером, где будут работать несколько таких рук. Но плюсы от такой затеи будут перекрыты минусами.
klylex
Это точно в «Разработку»? Может «Управление»?
giffok
Возможно. Я колебался между ними и хотел отнести именно ко второй, но робототехника была только в «Разработке».