Прежде всего хочу поблагодарить 470 читателей проголосовавших за продолжение в статье про многозонный усилитель.
Эксплуатация усилителя показала, что регулировать громкость не очень удобно находясь в помещении, которое может быть достаточно далеко находиться от кладовки где расположен усилитель с регуляторами громкости. Приходится несколько раз сбегать в кладовку и обратно добиваясь желаемого уровня громкости.
Так родилась идея регулятора, который всегда с тобой в кармане, т.е. приложения для телефона которое может управлять усилителем через Wi-Fi сеть.
Для реализации цифрового управления уровнем громкости усилителя механический потенциометр будет заменен электронным (DPOT – Digital Potentiometer). Среди не особо большого разнообразия доступных DPOT был выбран MCP41050 номиналом в 50 кОм что соответствует номиналу замещаемого механического аналога.
Это одноканальный потенциометр, следовательно, на 1 стерео усилитель потребуется 2 штуки. Существуют также сдвоенные версии из этой-же серии (MCP42XXX), но мне технологически было удобнее использовать 2 раздельных. Рассмотрим вкратце как он работает.
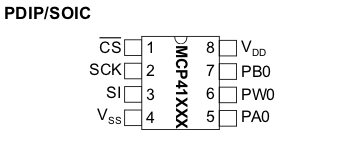
Аналоговая часть представлена выводами 5-7, вывод 6 (PW0) является движком (Wiper) потенциометра. Управление производится посредством SPI (Serial Peripheral Interface) (выводы 1-3). К выводам Vss и Vdd подводится питание 5V. Программирование чипа заключается в последовательной посылке Command Byte и Data Byte устанавливающего позицию движка потенциометра в позицию 0-255.
Доработка усилителя.
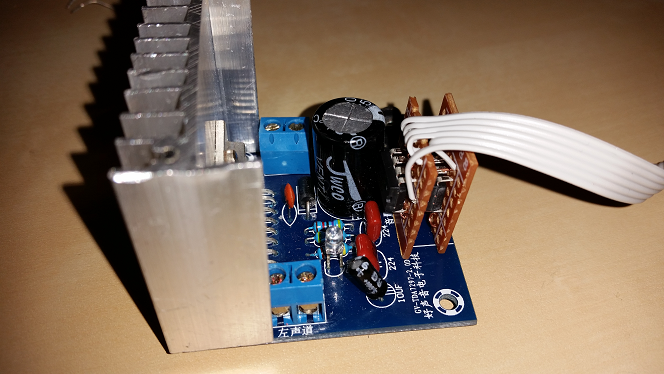
Как я рассказывал в предыдущей статье, я выбрал самый дешевый из готовых усилителей за $2.7 и мне его было не жалко курочить ради эксперимента. Для начала удаляем (аккуратно выпаиваем) механический потенциометр как показано на картинке:
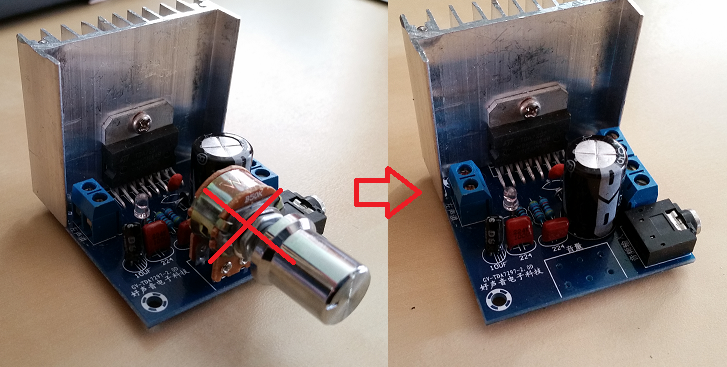
В освободившееся место будет установлен наш сдвоенный электронный регулятор.
Сборка регулятора.
Разрежем макетную плату вдоль а потом еще поперек на 3 части как показано на картинке:
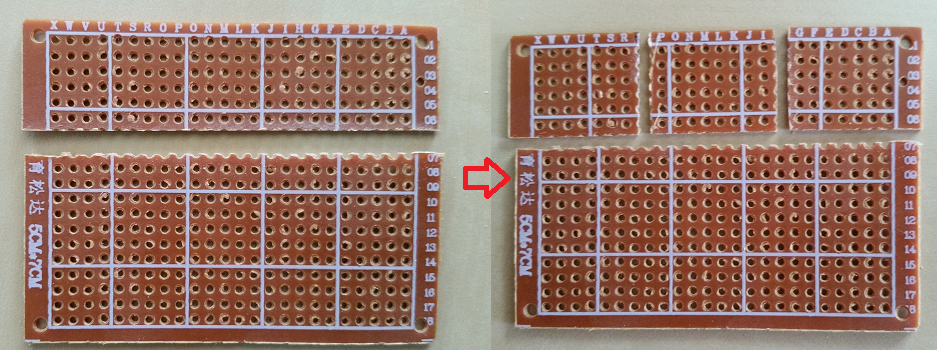
Если пару раз провести острым ножом вдоль отверстий, то плата легко ломается руками как печенье. После этого нужно напильником слегка подравнять края. Из получившихся кусков нам понадобятся 2 маленьких, они имеют размер примерно 1.5 x 2 см.
Выводы 2-4, 8 чипов соединяются параллельно, поэтому удобно собрать обе платы в виде сэндвича:
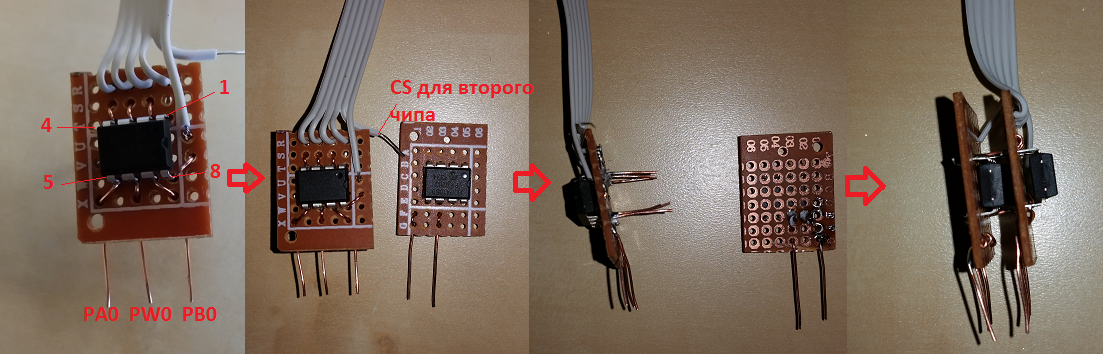
Для соединения управляющей цепи и питания с платой Arduino используем кусок кабеля-шлейфа. Цифровые линии управления при этом располагаем подальше от аналоговых цепей во избежание наводок.
Собранный регулятор после предварительного тестирования впаиваем в усилитель:
Как показало тестирование, добавление DPOT с цифровыми цепями управления во входные цепи усилителя не привело к появлению заметных на слух шумов или наводок.
Принципиальная электрическая схема

Программа для Arduino.
За основу взят метод управления “SPI вручную” (“SPI by Hand”) описанный здесь little-scale.blogspot.it/2007/07/spi-by-hand.html. В нем существенны 2 функции.
Функция spi_transfer побитно пересылает байт в чип.
void spi_transfer(byte working)
{
for(int i = 1; i <= 8; i++) // Set up a loop of 8 iterations (8 bits in a byte)
{ if (working > 127) { digitalWrite (POT_MOSI,HIGH) ; } // If the MSB is a 1 then set MOSI high
else { digitalWrite (POT_MOSI, LOW) ; } // If the MSB is a 0 then set MOSI low
digitalWrite (CLKdpot,HIGH) ; // Pulse the CLKdpot high
working = working << 1 ; // Bit-shift the working byte
digitalWrite(CLKdpot,LOW) ; // Pulse the CLKdpot low
}
}
Функция spi_out посылает байты команды и данных в чип который выбран установкой в логический 0 линии CS.
void spi_out(int CS, byte cmd_byte, byte data_byte)
{
digitalWrite (CS, LOW); // Set the passed ChipSelect pin to low to start programming
spi_transfer(cmd_byte); // Send the passed COMMAND BYTE
delay(2);
spi_transfer(data_byte); // Send the passed DATA BYTE
delay(2);
digitalWrite(CS, HIGH); // Set the passed ChipSelect pin to high to end programming
}
Поскольку управление решено было реализовать по локальной сети, а не через Bluetooth, в схему замешаны Еthernet shield, Web server в стандартном включении. Забегая немного вперед нужно отметить что программа для телефона создавалась в MIT App Inventor для которого не существует реализации TCP клиента. Поэтому управление пришлось делать пересылкой команд в параметрах запроса GET.
После выделения команд (param) и значений (value) из строки запроса они посылаются для управления нашими DPOT-ми:
param = readString.substring(6,9);
value = readString.substring(10,13).toInt();
if (param=="V1L") {V1L=value; spi_out(CS1, cmd_byte, V1L);}
if (param=="V1R") {V1R=value; spi_out(CS2, cmd_byte, V1R);}
if (param=="MU1") {spi_out(CS1, cmd_byte, V1L/5); spi_out(CS2, cmd_byte, V1R/5);}
if (param=="UM1") {spi_out(CS1, cmd_byte, V1L); spi_out(CS2, cmd_byte, V1R);}
Команды V1L, V1R – установить уровень громкости первого левого/правого канала соответствующим значению value которое может быть равным 0 – 255.
Команды MU1, UM1 – Mute, Unmute. Временное приглушение (исходный уровень /5) и возврат громкости к исходному значению.
Скетч целиком
#include <UIPEthernet.h>
#include <String.h>
int CS1 = 19; // Chip Select
int CS2 = 18;
int CS3 = 17;
int CS4 = 16;
int CS5 = 15;
int CS6 = 14;
int CS7 = 8;
int CS8 = 7;
int CLKdpot = 4; // Clock pin 4 arduino
int POT_MOSI = 5; // MOSI pin 5 arduino
byte cmd_byte = B00010011 ; // Command byte 'write' data to POT
uint8_t POTposition1 = 10; //initialize DPOT set initial position
uint8_t POTposition2 = 10;
uint8_t POTposition3 = 10;
uint8_t POTposition4 = 10;
uint8_t POTposition5 = 10;
uint8_t POTposition6 = 10;
uint8_t POTposition7 = 10;
uint8_t POTposition8 = 10;
uint8_t mac[6] = {0x00,0x01,0x02,0x03,0x04,0x05};
uint8_t ip[4] = {192, 168, 6, 25}; // IP address for the webserver
uint16_t port = 80; // Use port 80 - the standard for HTTP
EthernetServer server(80);
String readString = String(100);
String param = String(3);
int value = 0;
int V1L = 0;
int V1R = 0;
int V2L = 0;
int V2R = 0;
int V3L = 0;
int V3R = 0;
int V4L = 0;
int V4R = 0;
void spi_transfer(byte working)
{
for(int i = 1; i <= 8; i++) // Set up a loop of 8 iterations (8 bits in a byte)
{ if (working > 127) { digitalWrite (POT_MOSI,HIGH) ; } // If the MSB is a 1 then set MOSI high
else { digitalWrite (POT_MOSI, LOW) ; } // If the MSB is a 0 then set MOSI low
digitalWrite (CLKdpot,HIGH) ; // Pulse the CLKdpot high
working = working << 1 ; // Bit-shift the working byte
digitalWrite(CLKdpot,LOW) ; // Pulse the CLKdpot low
}
}
void spi_out(int CS, byte cmd_byte, byte data_byte)
{
digitalWrite (CS, LOW); // Set the passed ChipSelect pin to low to start programming
spi_transfer(cmd_byte); // Send the passed COMMAND BYTE
delay(2);
spi_transfer(data_byte); // Send the passed DATA BYTE
delay(2);
digitalWrite(CS, HIGH); // Set the passed ChipSelect pin to high to end programming
}
void setup() {
Serial.begin(9600);
pinMode (CS1, OUTPUT);
pinMode (CS2, OUTPUT);
pinMode (CS3, OUTPUT);
pinMode (CS4, OUTPUT);
pinMode (CS5, OUTPUT);
pinMode (CS6, OUTPUT);
pinMode (CS7, OUTPUT);
pinMode (CS8, OUTPUT);
pinMode (CLKdpot, OUTPUT);
pinMode (POT_MOSI, OUTPUT);
spi_out(CS1, cmd_byte, POTposition1);
spi_out(CS2, cmd_byte, POTposition2);
spi_out(CS3, cmd_byte, POTposition3);
spi_out(CS4, cmd_byte, POTposition4);
spi_out(CS5, cmd_byte, POTposition5);
spi_out(CS6, cmd_byte, POTposition6);
spi_out(CS7, cmd_byte, POTposition7);
spi_out(CS8, cmd_byte, POTposition8);
// start the Ethernet connection and the server:
Ethernet.begin(mac, ip);
server.begin();
Serial.print("server is at ");
Serial.println(Ethernet.localIP());
}
void loop() { // listen for incoming clients
readString="";
EthernetClient client = server.available();
if (client) {
Serial.println("new client");
// an http request ends with a blank line
boolean currentLineIsBlank = true;
while (client.connected()) {
if (client.available()) {
char c = client.read();
size_t pos = 0;
if (readString.length() < 16) {
//store characters to string
readString +=c;
}
// if you've gotten to the end of the line (received a newline
// character) and the line is blank, the http request has ended,
// so you can send a reply
if (c == '\n' && currentLineIsBlank) {
// send a standard http response header
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println("Connection: close");
client.println();
client.println("<!DOCTYPE HTML>");
client.println("<html>");
client.println("</html>");
break;
}
if (c == '\n') {
// you're starting a new line
currentLineIsBlank = true;
}
else if (c != '\r') {
// you've gotten a character on the current line
currentLineIsBlank = false;
}
}
}
// give the web browser time to receive the data
delay(1);
// close the connection:
client.stop();
Serial.println("client disconnected");
Serial.println(readString);
param = readString.substring(6,9);
value = readString.substring(10,13).toInt();
Serial.println(param);
Serial.println(value);
if (param=="V1L") {V1L=value; spi_out(CS1, cmd_byte, V1L);}
if (param=="V1R") {V1R=value; spi_out(CS2, cmd_byte, V1R);}
if (param=="V2L") {V2L=value; spi_out(CS3, cmd_byte, V2L);}
if (param=="V2R") {V2R=value; spi_out(CS4, cmd_byte, V2R);}
if (param=="V3L") {V3L=value; spi_out(CS5, cmd_byte, V3L);}
if (param=="V3R") {V3R=value; spi_out(CS6, cmd_byte, V3R);}
if (param=="V4L") {V4L=value; spi_out(CS7, cmd_byte, V4L);}
if (param=="V4R") {V4R=value; spi_out(CS8, cmd_byte, V4R);}
if (param=="MU1") {
spi_out(CS1, cmd_byte, V1L/5); spi_out(CS2, cmd_byte, V1R/5);
spi_out(CS3, cmd_byte, V2L/5); spi_out(CS4, cmd_byte, V2R/5);
spi_out(CS5, cmd_byte, V3L/5); spi_out(CS6, cmd_byte, V3R/5);
spi_out(CS7, cmd_byte, V4L/5); spi_out(CS8, cmd_byte, V4R/5);
}
if (param=="UM1") {
spi_out(CS1, cmd_byte, V1L); spi_out(CS2, cmd_byte, V1R);
spi_out(CS3, cmd_byte, V2L); spi_out(CS4, cmd_byte, V2R);
spi_out(CS5, cmd_byte, V3L); spi_out(CS6, cmd_byte, V3R);
spi_out(CS7, cmd_byte, V4L); spi_out(CS8, cmd_byte, V4R);
}
}
}
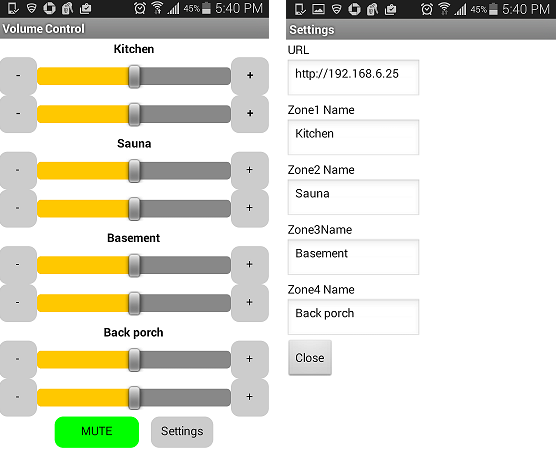
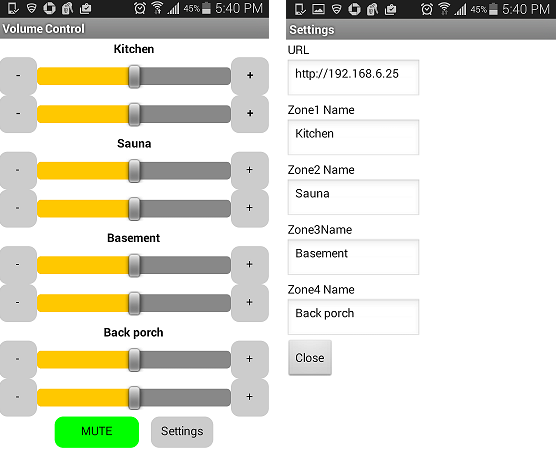
Приложение “Volume Control” для Android.
Приложение создано при помощи инструмента MIT App Inventor. Приложение имеет 2 экрана: основной экран и экран установок. Основной экран включает 4 идентичные секции, по одной на зону. Экран установок содержит контролы для установки URL соответствующему IP адресу Arduino, а также названия зон.
Немного деталей, поясняющих работу программы.
Значения установок и позиции регуляторов громкости сохраняются в TinyDB и используются при инициализации приложения при его открытии. Пример сохранения значения уровня левого канала первой зоны при закрытии приложения:

Как уже сказано было выше, используется компонент WebViewer для посылки команд методом Get в составе запроса к веб серверу, запущенному на Arduino.
Посылка команд как часто повторяющаяся операция выделена в процедуру SendCommand.
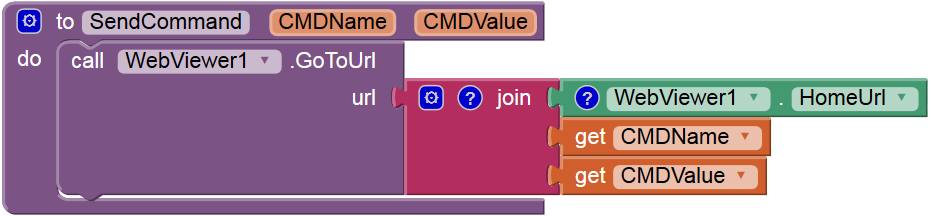
К примеру, при изменении позиции регулятора левого канала первой зоны она будет вызвана так:
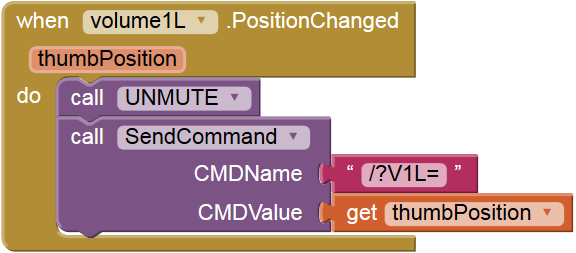
При этом будет послан запрос вида http://192.168.6.25/?V1L=156
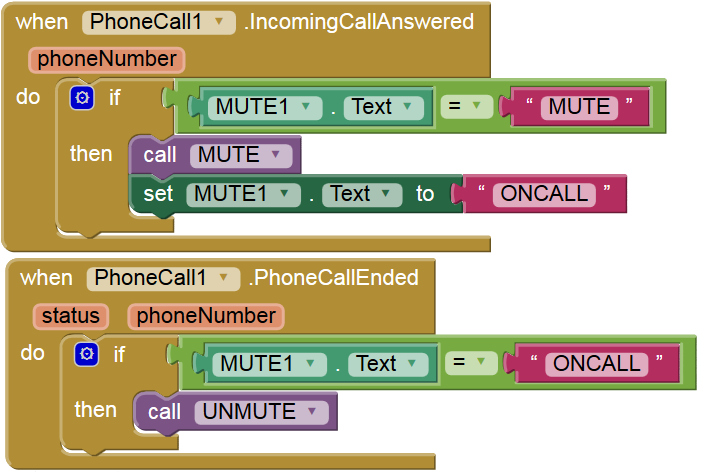
Если приложение запущено на смартфоне, то звук можно автоматически приглушить при ответе на звонок и восстановить при его окончании:
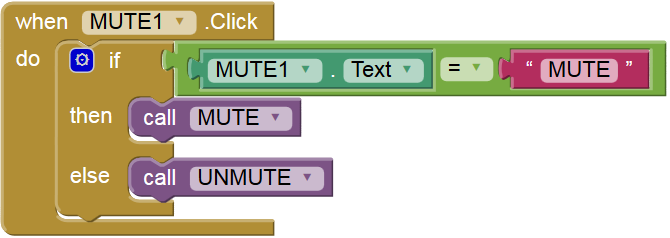
При нажатии на кнопку “Mute” вызывается процедура Mute которая в свою очередь вызывает SendCommand и меняет цвет и название кнопки:
Файл проекта для App Inventor 2 вышлю желающим по запросу.
В заключение, привожу видео демонстрирующее работу приложения. Задержка с переключением экрана связана с тем что приложение запущено в MIT AI2 Companion.

link0ln
Хорошо, в идеале вообще обойтись только esp8266 ====SPI===> MCP42XXX + питание. В esp8266 минимальная реализация http для GET запросов (on/off). Profit.
apple01 Автор
Вероятно еще понадобится port expander (например MCP23S17). Попробую сделать в следующей версии.