Многие наши решения могут показаться спорными, но, если на них взглянуть с точки зрения изначальных сроков, все выглядит несколько более логичным.
Внимание! Под катом много фото.

К обсуждению робота мы приступили 25 августа, а по изначальным требованиям организаторов готовый робот должен был быть предоставлен к 4 сентября. Мы прекрасно понимали, что этот срок будет сдвинут, но на сколько — большой вопрос, и это в дальнейшем сильно усложнило нам жизнь. Забегая вперед, скажу, что робот уехал от нас в первых числах октября.
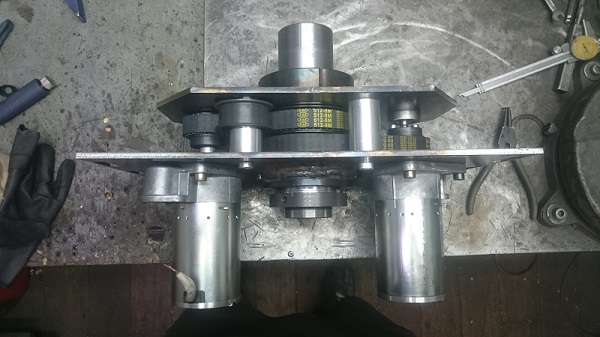
(узел редуктора без стенок)
Тип робота и ограничения
При выборе концепции мы просто посмотрели какие роботы существуют и как они сражаются:
- Флиппер (робот, обычно с пневматическим опрокидывателем). Один из самых выигрышных вариантов, так как он может вернуться в правильное положение с помощью своего оружия. По правилам, робот, который не двигается в течение долгого времени — проигрывает. Мы откинули этот вариант из-за возможных сложностей с пневматикой, специалистов по пневматике у нас в команде не было, а времени не переделку тем более.
- Робот с вертикальной или горизонтальной пилой. Почти во всех видео эти роботы хорошо смотрелись до боя, но оружие отказывало при первом ударе и в целом не наносило противникам урон, кроме царапин.
- Оружие в виде топора, скобы на опоре выглядит очень ненадежно и пробить 5мм металл, разрешенный по правилам, такой штукой не просто.
- Робот под модным сейчас названием “спиннер” (вращающаяся над роботом массивная балка) показался нам наиболее простым в изготовлении и содержащий в конструкции наименьшее количество непроверенных моментов.
- Роботы с маховиком спереди сейчас тоже в моде, но они технологически похожи с нашим выбором, а круговой защиты оружием не имеют.
По регламенту стоит выделить два основных ограничения:
— вес — 110 кг;
— габариты не более 1200х1200.
На этом шоу с регламентом творились чудеса — нам две недели согласовывали одну стенку редуктора оружия 6 мм, а не 5, так как он уже был вырезан (хотя все что относится к оружию не имеет этих ограничений). В итоге на месте были допущены роботы со стенкой 10-15мм и высотой 100 мм при минимальной высоте 300 мм. В России сейчас, насколько я понимаю, две крупные организации, проводящие бои роботов. При желании участвовать в обоих проектах стоит помнить, что у вторых максимальные габариты 1500х1000.

(процесс сварки лопастей)
Управление
По управлению на самом деле альтернатив не очень много. Делать свое или купить готовое от радиоуправляемых моделей. Но в данном случае, ни по стоимости, ни по времени не вижу никакого смысла делать свое, будет дороже и дольше, даже с учетом того, что на борту все равно есть электроника своей разработки. Да и нормальный, эргономичный пульт городить удовольствие сомнительное. По регламенту аппаратура должна поддерживать функцию Fail-safe, в случае потери сигнала от передатчика приемник переводит все каналы в заранее заданное значение (оружие выключено, остановка движения). Мы поставили два набора управления, и в случае повреждения основного, система с команды извне переключалась на резервное.
Также, старые системы управления не имеют алгоритма работы на разных частотах и работают на фиксированном канале. На практике это привело к тому, что на показательных выступлениях одна команда не смогла тронуться с места — радиомикрофоны и видеотрансляция заняли канал полностью.
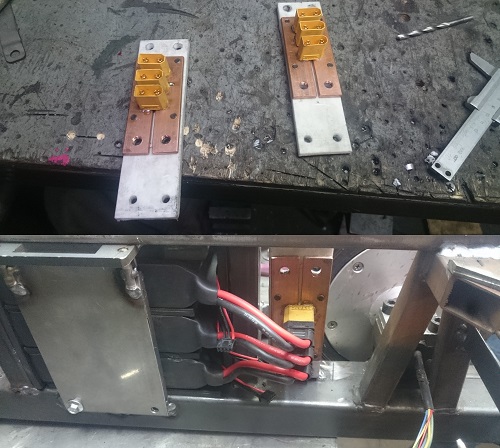
(шины питания моторов оружия, фторопластовые прокладки)
Передвижение
Из доступного выбора — автомодельные двигатели с регуляторами хода, АКБ на три минуты боя с запасом. Так делает большинство команд в мире, после мотора, редуктор и последнее звено это цепь на колесо. Для нас все хорошо, кроме редуктора. В наличии найти не удалось, а сделать это огромный пласт работ.
Из доступного здесь и сейчас были мотор-колеса от гироскутеров. 4 колеса по 350 китайских Вт должно было хватить с запасом и гарантией, так оно в общем то и вышло, но об этом позже. Из трудностей, кто пойдет по этому пути — напряжение мотор-колес гироскутеров 36В, модельные регуляторы на такое напряжение обычно вертолетные и не имеют заднего хода, мы чуть случайно не купили. Для управления моторами можно было бы сделать свой регулятор сразу с модельным управлением (от 1мс до 2мс на выходе приемника в зависимости от положения ручек), но на плату, детали, отладку ушло бы больше двух недель, да и на момент покупки вело-регуляторов, судя по отзывам, к ним не было претензий — просто в платах управления сделали преобразователь ШИМ > 0-5В.
На наш взгляд, с учетом полученного опыта, идеальным решением для 110 кг робота является два колеса и от 800Вт суммарной мощности.

(блокировочный болт, разочек спас наши руки и ноги)
Оружие
С точки зрения мощности и резервирования, мы изначально решили, что ротор с молотами будут крутить два двигателя. За неделю кроме авто-стартеров (по 1,5кВт, 12В) ничего под руку не попалось. Это было решение сродни наступлению на раскаленные грабли. Технический координатор проекта, с большим сомнением, сказал, что до нас многие пробовали, но не выходило. Пересчитав все еще раз, решили, что будет все нормально. Так оно почти и было… до самых последних дней перед отправкой. Обороты стартеров около 3000 в минуту без нагрузки и так как надо дать роботам противника въехать в зону действия молотов, а не просто царапать их, решили ременным редуктором понизить обороты до ~1500, что при скорости противника в 10 км/час обеспечивало “заход” на 70 мм в зону молотов. У японского прототипа было 7 небольших двигателей, крутящих большую шестерню. Ременной редуктор был выбран по временным причинам, шкивы в наличии, а ремни на заказ приходят за два-три дня, дополнительно это должно было защитить двигатели от разрушения при резкой остановке ротора о препятствие.

(на фото изготовленный на ЧПУ текстолитовый узел и притирка щеток)
Электроника
У большинства роботов установлены комплектующие от радиомоделей, но мы столкнулись с тем, что купленное модельное реле кратковременно (100-200мс) включено при подаче питания в независимости от положения органов управления передатчика. Учитывая, что в нашей схеме запускалось вращение 30кг ротора, использование этого реле было опасно, но так как на борту на каждой плате был контроллер, завели на него еще один канал с приемника, и включали реле через фильтр.
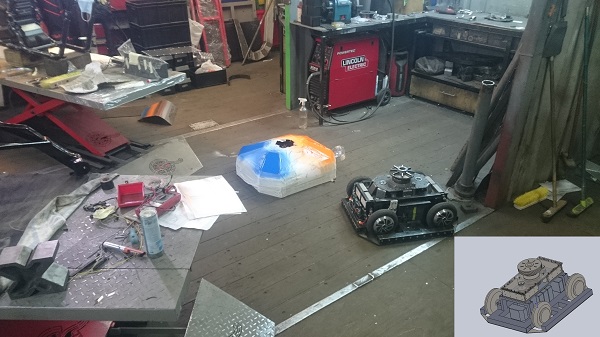
(процесс покраски, справа видны некоторые различия компоновки первого варианта от финального)
Название робота, команды и логотип
Это была самая простая задача из всех. Половина нашей команды делает кастомные мотоциклы на заказ — взяли их логотип и название. Вторая половина разрабатывает электронику для современных электропоездов, в том числе тяговые преобразователи мощностью более МВт.

(демпфера для защиты редуктора и моторов)
Сложности, которые у нас возникли
Весь робот по факту это две системы — тяга и оружие. У нас были проблемы и с тем и с другим.
По тяге все было хорошо, до момента установки на ротор молотов. После этого робот категорически отказался разворачиваться на месте и начали выгорать контроллеры.
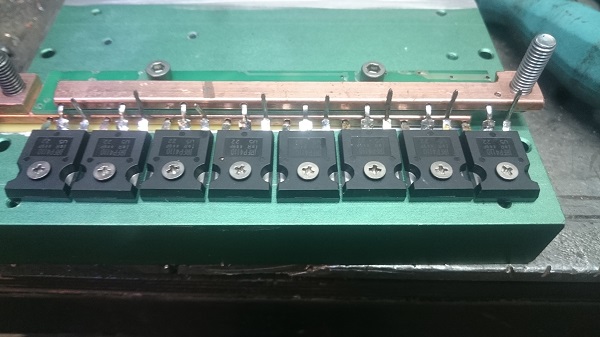
Причину выгорания контроллера быстро установить не смогли, так как горели не все. Но в который раз пишу, что времени не было и мы посчитали, что силовые транзисторы горят по перенапряжению, так как инерция у робота большая, а алгоритм контроллеров мог быть с изъянами. Собрали схему с чоппером, чтобы сливать все перенапряжения на резистор, привезли осциллограф, подключили чоппер, и увидели, что напряжение поднимается максимум на 5В. По току превышений не было, больше идей тоже. Заменили сгоревшие транзисторы на нормальные, и случилось чудо — больше проблем с ними не было даже на шоу. Просто бракованная партия транзисторов (тут вспоминается случай как нам на производстве поставили микросхемы пустые внутри, но с нормальной маркировкой).
(шина с транзисторами для регулятора тока, который в итоге не был нами использован, так как работал на грани перегрева)
Вторая проблема это тяговые АКБ. С точки зрения экономии и доступности, взяли от гироскутеров. Они всем хороши, кроме максимального тока. В среднем такая батарея дает не более 50А и выключается по перегрузке. Нам, в пике, нужно было больше, так как одна батарея на два контроллера (передние и задние колеса запитаны и управляются отдельно для резервирования). Пришлось разбирать АКБ и отключать эту защиту физически, но стоит понимать что это метод спорный и допустим только при очень кратковременных и редких перегрузках.
На четырех колесах, чтобы развернуть на месте 100 кг, по моим ощущениям, нужно не меньше честных 1.2 кВт. На двух, это требование резко падает до 500Вт. Маневрирование даже для робота с “круговой защитой” оказалось очень важно. Мы недооценили этот фактор и сейчас переводим робота в двухколесный вариант.
Самое “приятное” нас ждало после того, как мы показали организаторам готового робота, но без молотов на лопастях. То есть технически робот был допущен, но по факту стартеры горели через 7-12с после запуска, а молоты пришли как назло в последний момент.
Было принято несколько мер: притирка щеточных узлов, изготовление плавящегося, пластикового держателя щеток из текстолита на ЧПУ. Эти меры значительно снизили потери, но выделяемая мощность была слишком велика.

(окончание монтажа)
До отправки оставалось три дня, надежный регулятор тока на 200А, за этот срок, из деталей, которые были в Питере сделать не удалось, а доставки за день не нашли. Нам пришлось идти на отчаянный шаг, снижать обороты более, чем в два раза, прощаться с резервированием оружия и включать моторы последовательно. Эти меры помогли и на месте, с моторами проблем уже не было. На данный момент, без спешки ищем другие двигатели. Стартеры стабильно работают, но их использование не может быть оправдано ничем, кроме сроков (суммарно для тестов и запаса мы купили 7 стартеров).
Стоимость
Конечная стоимость робота составляет около 230 т.р. Это со всеми запчастями, двойным управлением, сгоревшими стартерами и всем прочим. Если делать в более спокойном ритме, полагаю можно уложиться в 190 тысяч. Файл рабочий, поэтому в нем не все по разделам, но зато не подогнанный.

Шоу
В итоге, мы приняли участие в 3-х боях. Это показательное уничтожение монитора, отборочный бой, и показательная битва помощника Германа Грефа и кого-то из правительства. Так как правами на трансляцию шоу не обладаю, вставлю одно видео с уничтожением телевизора, снятое нами:
В 3 бою, ротор нам оторвало, а у противника выворотило ось вместе с подшипником. Болты на более мощные мы поменяли, но по факту это был самый трудный случай, так как матанга противника крутилась во встречном нашему ротору направлению.
Из незабываемого это ремонт ночью робота в боксах формулы один:

По судейству осталось множество вопросов и не только у нашей команды. В нашем бою к участию был допущен робот, с неработающим оружием изначально, который и прошел дальше. Организаторы предлагали нам довольно странные “спорные бои” для тех кто выбыл сомнительно, но мы отказались, так как мы либо прошли, либо нет. Рыбы второй свежести не бывает.
С допуском роботов тоже стоит крепко подумать. Когда больше трети роботов не проходят по регламенту, но допускаются в основную сетку, это странно и точно не ведет к повышению доверия.
В регламенте есть общие фразы о том, что “робот не должен быть не разрушаем”. Эту фразу стоит убрать или уточнить. Возьмем победителя — это отлично собранный флиппер с трубчатым каркасом, что у него разрушаемо? Так как его подъемная платформа считается оружием, в ее начале утолщение более 5 мм. Флипперы победили и в прошлом году. Для интереса к шоу, явно стоит подумать об уравнивании шансов, чтобы не получить одних флипперов в следующих шоу — бой двух флипперов довольно унылое зрелище. Исходя из “критикуя-предлагай”, я вижу решение в убирании бортиков, так как флиппер просто закидывает туда всех соперников и бой решается на первых секундах. То что победитель в этом году опрокидывал роботов обратно, была его добрая воля и не факт, что другие поступят так же, а это сильно сказывается на впечатлении от шоу. Шнеки так же стоит ставить вплотную к стеклу, иначе единственный вид роботов, который может туда закинуть — флиппер.
Шоу для зрителей было великолепно. Звук, свет, сценарий — реально круто и захватывало. Светящиеся танцоры — идея не новая, но вживую видел впервые и это также цепляло (один из таких костюмов мы успели починить за несколько секунд до выступления на финальном шоу, не смотря на то, что мы в нем не участвовали — хоть в чем то пригодились). Я благодарен тем людям, которые провели такой огромный объем работ. Планка была поднята чрезвычайно высоко, будем следить за развитием событий.
П.С. Статья получилась немного о роботе и немного о шоу, но на две отдельные статьи, на мой взгляд, материал не тянул, а разбавлять их тем как мы здорово посетили Скайпарк, Роза Хутор и с кем познакомились, для технического ресурса решение было бы сомнительное.
Комментарии (35)

ser-mk
29.10.2017 21:47Оружие только механическое допускалось? можно было бы «заплевать» противника горючей смесью с поджиганием. или для опрокидывания использовать пиропатрон.

TheCoreFactory Автор
30.10.2017 08:19+1Только механический привод. Улетать, гореть ничего не должно. Так же запрещены сетки.
Из приводов оружия электрика или пневматика, гидравлика под запретом.
Для оружия в текущей редакции можно использовать ДВС двигатель, но он был только у одной команды, хотя вес с учетом акб экономит значительно.
tmin10
30.10.2017 13:19ДВС, наверное, сложнее управлять, для него нужна коробка передач и её автоматическое управление.
TheCoreFactory Автор
30.10.2017 13:35Если брать двигатель от бензопилы там в комплекте есть и механика отключающая цепь при снижении оборотов, что бы не глохло. На газ — стандартная рулевая машинка. Редуктор обычно просто цепной или ременчатый. Коробка передач нужна для широкого диапазона оборотов, при вращении чего либо с постоянной скоростью получается избыточно.
cyberly
30.10.2017 13:39В моторе от скутера, например, ничем не нужно управлять

tUUtiKKi13
30.10.2017 17:34В скутерах есть коробка передач, вариатор называется. Изменяет крутящий момент, но плавно.
ser-mk
30.10.2017 14:32очень жаль, было бы очень зрелещно)
ну хоть можно ли магнетрон от микроволновки поставить что бы спалить электронику противника?)TheCoreFactory Автор
30.10.2017 14:34Увы, тоже нет, вот список основных запретов:
— Нельзя использовать жидкости в качестве оружия;
— Нельзя использовать огнеметы, пиротехнику и воспламеняющиеся элементы;
— Нельзя использовать метательные средства в качестве оружия;
— Запрещено использовать электрошокеры и иные высоковольтные импульсные источники
питания;
— Не допускается создавать радиопомехи;
— Не допускается использовать сети;
— Не допускается использовать веревки, тросы, а также ткани;
— Не допускается преднамеренное отделение частей робота с целью препятствовать
движению противника;
— Не допускаются гидравлические виды оружия;
Xandrmoro
30.10.2017 17:07Мне всегда казалось, что наиболее эффективно было бы добить противников высоким напряжением через телескопические штанги. К сожалению, так тоже нельзя :(

webzuweb
29.10.2017 22:10Тратили свои деньги?
TheCoreFactory Автор
30.10.2017 15:56Промобот оплачивал перелет, проживание и доставку робота туда и обратно.

Daddy_Cool
30.10.2017 00:11На повестке дня вопрос — как победить флиппер?!!!

VIPDC
30.10.2017 04:46На самом деле не сложно, нужен робот с горизонтальным валом «рубанком», он здорово измельчает флипперов за счёт очень высокой скорости вращения.
Посмотрите бои роботов на You..be, в четвертом сезоне робот «йети» неплохо их кромсал.
А вообще выбранная конструкция достаточно опасная, думаю если бы решили проблемы со скоростью вращения всё получилось.TheCoreFactory Автор
30.10.2017 08:25На этих боях такие конструкции, даже злобные индийские ничего флипперам сделать не смогли. Возможно, вопрос категории — они привезли относительно легких роботов около 70кг.
Над скоростью вращения работаем. Весной планируется этап в Перми — к этому моменту надеюсь доведем до ума некоторые элементы.
В целом, сейчас после поездки и первого участия появилось видение как сделать робота-убийцу, но по стоимости он будет раза в два дороже, если поймем откуда брать деньги, сделаем.VIPDC
30.10.2017 09:22Вот этот робот
www.youtube.com/watch?v=qzDOqi2Pkp0
Мне очень понравился. Принцип рубанка очень силен, главное успеть доехать.TheCoreFactory Автор
30.10.2017 11:04+1Вариант хорош и бой смотрится интересно. Но на видео заметно, что отрываются сильно выступающие части, флиппер достаточно плотная конструкция, а поднимающая плоскость опирается на пол — ее не подцепить. Единственный шанс, пока идет закрытие, но до этого момента надо быть не выкинутым с ринга.
green_worm
30.10.2017 11:27А нельзя присобачить сверху точильный диск чтоб просто распиливать?
Кстати, на видосах находил те, которые огнем поджаривают в добавок к обычным переворачивалкам.
Кстати, насколько соответствует правилам сбивать квадрокоптеры, которые летают в зоне боевых действий?TheCoreFactory Автор
30.10.2017 12:55Диск можно, но робот противника не закреплен и будут по факту только искры.
В регламенте на данном этапе нет разрешения на использования отделяющих деталей/частей, огонь тоже запрещен в угоду безопасности.green_worm
30.10.2017 13:44На видосах зажимают в углу периодически и рубанок неплохо пилит. Особенно если обшивка плохо держится или материал хлипкий. Правда, диск в виде буквы О (то есть, кольцо скорее) быстро погнулось и заклинило, перед этим даже отпилив какие-то запы. =)
Вы сейчас о регламенте российских соревнований, на сколько понимаю? Что значит отделяющие детали?
Вообще, спасибо за статью и ответ. Очень интересно.
А с опрокидыванием вы как-то боретесь?TheCoreFactory Автор
30.10.2017 14:05Сейчас на гос. уровне соревнований нет, есть две организации судя по всему — Промобот и Бал роботов. У них разный регламент.
Вот первые как раз провели очень крупное мероприятие в Сочи. По их правилам робот должен быть один и не разделяем.
По вторым:
1.3. Разрешено использование кластерных роботов (способных разделяться на несколько независимых роботов). При начале боя робот должен быть единым целым. При повреждении 50% ботов и более, робот считается проигравшим
С опрокидыванием мы к сожалению, никак. Это нас и подвело, мы планировали, что роботов на ринге будет два и ротор успеет заново набрать скорость. Но так как сетка была по три робота, мы успели ударить всего дважды и потом ротор остановился почти полностью, в этот момент нас опрокинули. Сейчас понятно, что делать двустороннюю конструкцию обязательно.

ozonar
30.10.2017 12:32Разрешено ли делать ИИ роботу, чтобы он производил какие-либо действия самостоятельно?
TheCoreFactory Автор
30.10.2017 13:04+1В правилах от организаторов Битвы Роботов в Сочи (Промобот) прямого запрета не нашел.
Их коллеги в своем регламенте однозначно запрещают подобное:
6.3. Робот не должен обладать автономностью. Все управление должно осуществляться исключительно с пульта оператора.
tmin10
30.10.2017 13:22Видимо боятся восстания машин: радиоуправляемых роботов можно остановить, просто включив глушилк усвязи: по регламенту без связи они должны выключать оружие и остановиться. А если робот сам будет принимать решения, а связь откажет, будет интересно.
TheCoreFactory Автор
30.10.2017 13:36Да, думаю просто боятся ложных включений оружия при ошибках в алгоритме.
Как показывает практика любительские автономные роботы завлекают авторов сложностью, но пока довольно скучны, как массовое зрелище.
Storm21110
30.10.2017 15:06Из доступного здесь и сейчас были мотор-колеса от гироскутеров. 4 колеса по 350 китайских Вт должно было хватить с запасом и гарантией, так оно в общем то и вышло, но об этом позже. Из трудностей, кто пойдет по этому пути — напряжение мотор-колес гироскутеров 36В, модельные регуляторы на такое напряжение обычно вертолетные и не имеют заднего хода, мы чуть случайно не купили. Для управления моторами можно было бы сделать свой регулятор сразу с модельным управлением (от 1мс до 2мс на выходе приемника в зависимости от положения ручек), но на плату, детали, отладку ушло бы больше двух недель, да и на момент покупки вело-регуляторов, судя по отзывам, к ним не было претензий — просто в платах управления сделали преобразователь ШИМ > 0-5В.
А можно поподробнее этот момент расписать? Делал себе машину на колесах от гироскутера, в качестве контроллеров тоже взял контроллеры от электровелика. Вы использовали контроллер с датчиками Холла или просто 3х проводный? Преобразователь шим в уровень от 0 до 5 делали на рассыпухе или на контроллере каком-то типа меги? А какой конкретно велоконтроллер использовали? Мой не поддерживает задний ход и ездит только вперед:(
И да, я сделал её с 2мя свободно поворачивающимися колесами сзади, и с 2мя ведущими спереди, потому что иначе вообще жесть поворачивать…TheCoreFactory Автор
30.10.2017 15:18Да, мотор-колеса с 3 датчиками Холла. В доступе было два контроллера, первый «Kelly», второй с названием «Infineon 6 FET». И тот и другой на самом деле имеет задний ход, просто вход реверса убран в корпус и не выведен на шлейф управления. Мы в итоге взяли Kelly, внутри единственный пустой пин подключения к плате — это и есть задний ход. Поставили транзистор, который замыкает подтянутый к питанию вход на землю.
В роботе две платы на AtMega328, туда же завели канал приемника, на внешнее прерывание по изменению поставили таймер и им измеряли длительность импульсов. На выход, по SPI поставили внешний ЦАП. На мой взгляд это самое простое решение.Storm21110
30.10.2017 17:13Ясно, спасибо. У вас с пульта ведь выходило что 1000-1500 мкс это реверс, а 1500-2000 вперед? А если реверс это просто вход 0/1, то расшифровку выхода пульта тоже в меге просто сделали и всё? Или пульт перенастраивали? Вы использовали что-нибудь типа Pixhawk или напрямую с приёмника брали управляющий ШИМ?
TheCoreFactory Автор
30.10.2017 18:22Дополнительного канала для направления нет. В контроллер заведено два канала приемника(левая и правая сторона робота), используются два входа всего соответственно. Направление, как верно написано определяется в зависимости от длительности сигнала, если требуется включение заднего хода, то контроллер просто переводил логический вывод, к которому подключен транзистор в единицу, а по SPI выдавал задание 0-5В на велоконтроллер.

Neroon
31.10.2017 01:28Не было проблем с сильным отскакиванием при ударе по сильно наклоненной броне? Частенько такое наблюдается у спиннеров в иностранных шоу.
Насчет флипперов все конечно зависит от регламента, но если посмотреть на последние Robot Wars и Battlebots, то никакого доминирования флипперов нет.TheCoreFactory Автор
31.10.2017 08:45В текущем варианте видимо не хватает оборотов, но пока не откидывало. Если обратить внимание на арену Battlebots, то видно что роботы скатываются обратно за счет прямых углов. В текущей конфигурации арены у Промобота есть ступенька с которой большинство роботов после подкидывания съехать из-за низкой посадки не могут, думаю основная разница в этом — в статье я об этом упоминал, что стоит убрать бортики.
Aspesk
31.10.2017 08:46Судя по последнему сезону битвы роботов, главная проблема вашего робота — он сам. Такие чаще всего проигрывают от удара самим собой же. Резкий удар и остановка винта приводят к перегрузкам в нескольким местах и далее робот ездит просто как машинка.
Самый современный вариант — рубанок впереди, массивный маховик весом 20 кг и оборотами 10000 в мин создаёт такой момент, что роботы по 80 кг улетают на 10 м и больше не работают.TheCoreFactory Автор
31.10.2017 08:53Практика показала, что проблема не в надежности. После удара в борт, робот остался полностью цел, при встречном ударе с матангой — срезало болты, после их замены все работает. Так же при подкидывании робота флиппером и ударе о стену повреждений не было. Проблема этого робота — отсутствие возможности вернуться в рабочее положение.
Рубанки, в том числе победитель из Индии были. За многие конструкции рубанку не зацепиться, а с ринга они улетают тоже очень хорошо. По поводу «больше не работают» — к счастью, основная часть роботов собрана с душой и полетом с последующим падением их уже не отключить.
agat000
У вас аппарат одинаковый со всех сторон. Не было проблем с ориентацией «перед-зад»?
А вообще впечатляет. Поздравляю с удачной и за конченой конструкцией.
Оружие получилось отличное. А реверс может как то улучшить боевые качества? Чтобы избежать встречного вращения с другой «каруселькой»?
TheCoreFactory Автор
С ориентацией не было проблем, если посмотреть на первое фото на роботе есть оранжевые и синие сектора для этого. Так как я работаю в железнодорожной тематике, то точно знаю, что оранжевый это перед, как у электропоезда. Логика забавная, но работает.
Спасибо!
При замене двигателей возможность вращаться в обратную сторону появится. Сейчас для реверса стартеров нужна силовая коммутация с рабочими токами более 200А, а по весу мы проходим очень плотно 109,7 при разрешенных 110кг. В любом случае «карусельку» противника тоже надо ломать, поэтому сделать более надежно наилучший метод.