

Полифункциональный зарядник - хорошая платформа чтобы показать преимущество гибридной графической нотации перед текстовой нотацией С/С++ . Для этого используется MATLAB Simulink под Windows. Метод разработки напоминает SIL (software-in-the-loop), но модель выполняется на ПК в реальном времени и при взаимодействии с реальным железом.
SIL - это когда пишется не сразу конечный софт, а модель софта. Модель является такой же программой, но выполняется на компьютере. Это типа эскиза. Основные алгоритмы в модели реализованы, но сопутствующие вещи отсутствуют. Например данные накапливаются, и реально их бы на SD карту писали, а в модели мы их на график выводим. Или в дивайсе есть специальные способы взаимодействия с пользователем вроде кнопочек и переключателей, а в модели все делаем мышкой. Нам там еще светодиодами информационными моргать, но в модели это опускаем.
Модели в стиле SIL на вход подают разные тестовые сценарии и смотрят чтобы все было как задумано на выходе. Потом из SIL модели в MATLAB-е можно сгенерировать программные модули на языке C/C++ для компиляции и последующей загрузки в микроконтроллер. При этом можно быть уверенным, что в микроконтроллере алгоритм будет работать точно также как и на ПК.
Но в MATLAB можно пойти дальше. Можно SIL модель скомпилировать и запустить на ПК в среде Windows в режиме жёсткого реального времени с длительностью такта, скажем, в 5..10 мс.
С таким тактом модель способна без потерь принимать и отдавать данные от внешнего устройства по протоколу TCP. Что из этого следует?
Следует то что модель можно как угодно модифицировать и рефакторить и мгновенно запускать в паре с устройством пропуская фазу компиляции и загрузки бинарника. В нашем случае непосредственно измерения токов и напряжений, управление ключами и ЦАП производятся платой зарядника, а алгоритм зарядника выполняется на ПК общаясь с платой физически через USB интерфейс. Поверх USB работает TCP протокол. Такое решение позволяет всем важным массивам данных оставаться и накапливаться на ПК. Там их можно анализировать и визуализировать как угодно, прогонять повторно и отлаживать цифровую фильтрацию, детекцию и прочее. Компьютер намного удобнее в этом плане чем плата с микроконтроллером.
Это удобно, но не это главный повод радоваться ускорению разработки.
Модель мы создаём в графической нотации MATLAB Simulink. Я называю ее гибридной потому что в ней по прежнему можно широко использовать текстовые программные инструкции. Это придаёт разработке ту лёгкость когда незнание не становиться препятствием. Если не знаете как нарисовать, то тогда просто напишите это. Если лень писать, то можно просто создавать таблицы истинности.
Много сказано о преимуществах и недостатках графических нотаций. Они широко распространены в языках SQL запросов, в представлениях бизнес процессов, в языках спецификаций типа SDL. Они все отличаются друг от друга как небо и земля. Сильнее чем Python от assembler-а. Так и нотация Simulink представляет собой нечто особенное и не сравнимое с какими-нибудь простыми концепциями типа автоматного программирования.
Это я бы назвал набором удобных графических представлений действий и состояний с сопутствующими библиотеками, средствами редактирования, рефакторинга, отладки, верификации, кодогенерации и т.д.
Сразу оговорюсь, что весь софт с нуля для микроконтроллера в среде MATLAB Simulink я не создаю. На плате полифункционального зарядника уже присутствует программная платформа с операционной системой реального времени, файловой системой, сетевым протоколом и прочей функциональностью. Весь этот слой программного обеспечения MATLAB заменить пока не может. Хотя есть множество примеров проектов в MATLAB под голые платы, но они очень функционально ограничены.
Рекламировать MATLAB Simulink нет смысла, скажу только что в нем привлекает лично меня.
Самое важное - это огромный набор функциональных блоков, в частности цифровых фильтров на любой вкус. Именно с использования фильтров началось моё увлечение матлабом. Очень удобная визуализация любых сигналов и состояний переменных.
Второе чем привлекает графическая нотация Simulink - это минимум имён. Т.е. буквально прямо в Simulink можно ничего не именовать. В его подсистеме Stateflow именовать обязательно надо только состояния. Именованные переменные и функции тоже понадобятся рано или поздно, но их будет минимум. По моему мнению все языки с текстовыми нотациями ведут одну общую войну за передел, структуризацию и минимизацию пространств имен и одновременно это их бич, поскольку ресурс имён ограничен у человека. Имена придумывать, запоминать, отличать, вспоминать - сложно. Графическая нотация резко снижает затраты на содержание пространства имён.
Третья привлекательная черта графической нотации - быстрота рефакторинга. Все заранее предусмотреть невозможно. Программные модули пишутся поначалу с большими пробелами в функциональности, потом наступает черед уточнений, выполняемых с помощью рефакторинга. Например, в текстовой нотации чтобы в конструкции switch внести новое состояние приходится обычно выполнять редактирование в нескольких местах и в нескольких файлах. Кроме того, что это несколько утомительно, это еще и источник ошибок. В Simulink это делается в одном месте на диаграмме и вставкой всего одного блока. Буквально одно движенье мышью. С рефакторингом целиком функций в текстовых нотациях еще хуже. Если нужно разделить функцию на несколько, то это выливается в целый анализ по поводу эффективных способов передачи аргументов и возврата результатов, сепарацию и перенос локальных переменных, создание структур или даже классов и проч. В Simulink это делается простым copy-paste нужного фрагмента с одного уровня на другой или в блок подсистемы. Т.е. экономия времени в этом плане в графической нотации неоспоримая.
Четвёртое преимущество заключается в обозримости. Если в текстовой нотации открыв файл и увидев функцию мы не сможем понять где она вызывается не предприняв целый ряд поисков, то в окне Simulink мы всегда видим весь путь от корня модели до подсистемы на которую смотрим. Это избавляет от ментальных усилий по запоминанию структуры алгоритма.
Разработка программы тестера аккумуляторов
Назначение программы заключается в зарядке аккумулятора и последующей разрядке в течении нескольких циклов. По результатам работы программы выясняется реальная ёмкость аккумулятора, время необходимое для полного заряда, оптимальные режимы зарядки. Особенностью алгоритма является его сравнительно невысокое быстродействие. Достаточно выполнять алгоритм с тактом в 10 мс чтобы эффективно управлять зарядником.
Второй задачей алгоритма было найти приемлемые эвристики для процесса заряда без использования информации о температуре аккумулятора. В частности поэтому нигде в модели не учитывается температура аккумулятора.
Разработка модели в Simulink
Если разработка предусматривает перенос алгоритма на микроконтроллер, то в первую очередь надо озаботиться легко портируемым интерфейсом входных и выходных данных алгоритма.

Поскольку переносить на целевой микроконтроллер будем только ядро, то его надо изолировать от всех вспомогательных подсистем необходимых для работы технологии SIL.
К этим вспомогательным подсистемам относится передатчики и приёмники данных, блоки с настраиваемыми параметрами и всяческие отладочные визуальные компоненты. В интерфейсах применяются как одиночные сигналы так и шины объединяющие несколько сигналов. Выбор того или иного способа определяется только лишь удобством восприятия при разработке модели. Важные сигналы делаются одиночными. Однотипные объединяются в шины.
Ниже изображено содержимое блока устанавливаемых параметров. Чтобы не загромождать верхний уровень модели все параметры объединены в шину. Во время преобразования MATLAB-ом модели в исходники на языке C шины преобразуются в структуры, так что применение шин и удобно и полезно.

Структуры передатчика и приёмника выполнены способом аналогичным описанному в этой статье


Теперь взглянем внутрь ядра модели

Ядро модели является смесью подсистем Simulink и диаграмм Stateflow. В подсистеме Simulink (диаграмма Stateflow тоже подсистема, но дальше в тексте она будет исключаться из понятия подсистема) удобно выполнять поточную цифровую обработку сигналов. Там не важны состояния процесса, важнее непрерывные потоки данных и операции над ними. А в Steflow уже внимание концентрируется на стадиях процесса в виде состояний и признаках перехода от одной стадии к другой. Нельзя сказать что в обычных подсистемах Simulink нельзя организовать состояния и стадии но они там не будут иметь ясно обозначенных графических элементов. Словом Simulink и Stateflow это как две разные графические нотации в рамках одной среды.
О разработке детектора окончания заряда будет сказано ниже, а сейчас ещё более углубимся в диаграмму Stateflow

Здесь сразу можно заметить иерархическую организацию диаграммы. Каждый прямоугольник со скруглёнными углами есть состояние или диаграмма содержащая состояния. Если в текстовой нотации мы создаём новые функции или файлы чтобы разбить текст на более мелкие и читаемые фрагменты, то здесь мы переносим часть диаграмм внутрь других диаграмм. Но можем и проще, просто охватить прямоугольником диаграммы уже существующее скопление состояний или диаграмм и они становятся частью новой диаграммы более высокого уровня. Т.е. создавать иерархии в Stateflow очень просто, не в пример текстовым нотациям.
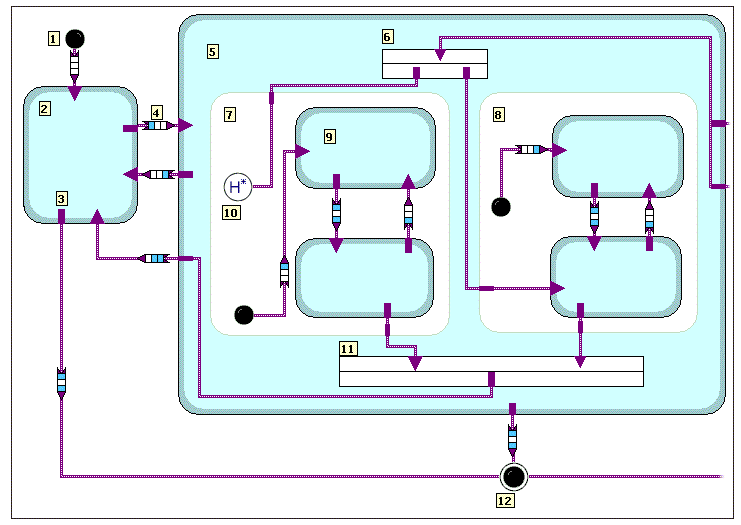
Если заглянем ещё глубже, то увидим основной алгоритм зарядника

В жёлтых прямоугольниках комментарии. Особенностью графической нотации является присущая ей уникальность дизайнерского исполнения. Это не отступы обсуждать в текстовой нотации, здесь поле для фантазии и холиваров гораздо шире.
Но тем не менее я считаю, что комментарии нужны всегда, даже если тут кристально понятная диаграмма. Другая слабость автора - ортогональные линии связей. Из-за этого можно увидеть пустые сегменты без условий и операторов в цепочках связей . Это делается просто из эстетических соображений. Лишнего кода они не добавят. Это как операторы goto, но поскольку тема молодая, публичной порицания за такое я пока не ожидаю.
На диаграмме изображён очень простой алгоритм быстрой зарядки константным током. Но добавлены ещё стадии релаксации после отключения зарядки и поддержки плавающего заряда некоторое время до того как подключится нагрузка на аккумулятор для его разряда. Это сделано для того чтобы не упустить какие либо странности в поведении аккумулятора и с отладочными целями. Кроме того введено множество проверок на аварийные или нештатные ситуации. Зарядка отключается если какое либо напряжение опускается ниже нормы, если перегревается DCDC преобразователь, если ток длительное время остаётся выше определенного уровня, если возникает перегрузка по току, если возникают реверсные токи во время зарядки, если переданный заряд превышает ёмкость аккумулятора.
Некоторые защиты выполнены не в модели, а в фирмваре платы зарядника, поскольку они должны сработать максимально быстро. В частности защита по току реагирует в течении 50 мкс. Такую скорость модель с тактом в 10 мс обеспечить не может.
А вот такой симпатичный график можно наблюдать в течении работы модели в Simulink

Для наблюдения доступны все переменные и состояния диаграмм. При желании все можно сохранить и многократно воспроизводить для последующего анализа.
Пример разработки детектора окончания зарядки
Окончание зарядки можно определить по снижению тока зарядки до определенной величины или спустя некоторое заведомо большое время. Первый вариант плох тем что величина остаточного тока не специфицируется достаточно точно для аккумуляторов и может меняться с течением жизни аккумулятора и сильно зависит от температуры. Второй вариант плох своей неэкономичностью.
На практике неплохо показывает себя алгоритм определения окончания заряда по скорости падения зарядного тока. Он мало чувствителен к температуре. Используется эффект стабилизации тока на одном уровне при полном заряде аккумуляторе.
Для отработки алгоритма воспользуемся ранее записанным графиком зарядного тока полученным во время работы нашей модели. И сделаем такую тестовую модель для отладки

Для возможности отладки реакции детектора на нештатные ситуации добавлен генератор произвольных сигналов. Детектор помимо сигнала окончания зарядки Result имеет выход сигнала тревоги Alarm означающей аномальное поведение тока.
Модель детектора выглядит вот так:

Важной частью модели является экспоненциальный фильтр

В палитре Simulink можно найти готовый экспоненциальный фильтр. Это будет компонент Moving Average из DSP System Toolbox. Там экспоненциальный фильтр получают выбором метода Exponential Weighting. Экспоненциальный фильтр интересен тем, что как и бегущее среднее он не даёт осциллирующих выбросов на фронтах сигналов. Но экспоненциальный фильтр при этом быстрее реагирует на изменения сигнала чем бегущее среднее при том же качестве сглаживания и не требует глубокого буфера для накопления данных (о расходе памяти нужно думать и здесь, поскольку модель будет впоследствии скомпилирована в микроконтроллер).
В нашем случае была сделана своя реализация фильтра, поскольку требовался сигнал сброса фильтра. Глобальный сброс есть у всей модели и он нужен чтобы перезапускать детектор при смене режимов работы зарядника. Наша модель также даёт задавать коэффициент фильтра через внешний вывод.
Другой важный элемент модели - детектор размаха сигнала. Ток может снизится на каком-то интервале времени, но при этом сильно колебаться. Это не будет признаком окончания заряда. Поэтому реализован детектор отсутствия колебаний превышающих заданную величину на интервале времени:

Детектор размаха выполнен на вычислителях бегущего максимума и минимума. В конце интервала измерения берётся разница между максимумом и минимумом и сравнивается с пороговым значением. Затем следует сброс и новые вычисления в течении следующего интервала.
После некоторого числа итераций и рефакторинга модели были получены приемлемые результаты

Здесь преимущества MATLAB выразились в быстром тюнинге коэффициента фильтра и быстрой симуляции различных искажений тока подтвердивших устойчивость детектора к непредсказуемым ситуациям.
Нужно ли оптимизировать модели?
Если модель предназначена для выполнения на микроконтроллере, то оптимизировать очень желательно. Особое внимание надо уделять типам данных. Микроконтроллеры операции с плавающей точкой делают значительно медленней чем целочисленные. Особенно затратны операции деления с плавающей точкой. А в нашем экспоненциальном фильтре как раз есть две такие операции. Чтобы избежать деления фильтр можно переделать на целочисленную арифметику с использование сдвигов вместо деления. Тогда демонстрационный фильтр будет выглядеть так:

Делаем испытательную модель для сравнения работы фильтра с плавающей точкой и фильтра целочисленного с применением сдвигов:

Получаем результат в виде графика:

Целочисленный фильтр слегка грубее фильтра с плавающей точкой, но вполне приемлем. Правда переход на целочисленную арифметику потребует модификации остальных блоков модели работающих со значением тока. Поэтому к такой модификации следует прибегать когда действительно необходимо, например когда микроконтроллер не содержит сопроцессор операций с плавающей точкой, как ARM Cortex-M0 или ARM Cortex-M33 или когда подобных фильтров в модели очень много. В нашем случае оставлена модель с плавающей точкой, поскольку фильтр всего один и одна лишняя микросекунда беспокойств не причиняет.
Какие свойства модели надо назначить чтобы она выполнялась в реальном времени
Для запуска работы модели в реальном времени используется инструмент Simulink Desktop Real-Time, а именно режим Connected IO mode.
Для этого нужно просто в настройках модели выбрать соответствующий System target file:

Настройка решателя у нас вот такая:

Время окончания работы определяется в самой модели, шаг семплирования задаётся в файле рабочего пространства, который будет загружен вместе с моделью. Он в данном случае 0,01 сек.
И практически это всё что нужно настраивать. Далее жмём Run и смотрим результат.
Как измеряются характеристики реального времени во время выполнения модели
Очень важный вопрос в нашем методе выполнения программы состоит в том насколько точно выдерживаются интервалы времени считывания и записи сигналов в плату зарядника.
Как уже было сказано, для алгоритма выбран интервал времени в 10 мс. Это вполне адекватное время для задачи управления зарядом. Аккумуляторы медленно заряжаются и медленно реагируют.
Ниже дан скриншот диаграммы в субблоке процесса зарядки. В этом окне можно визуально наблюдать как чередуются состояния и ветви исполнения. Все активные состояния и ветви подсвечиваются синим. Но средств точного измерения времени приходы и отправки пакетов во внешние устройства из диаграмм MATLAB нет. Измерением в нашем случае занимается сам дивайс. Поскольку только в нем можно точно зафиксировать когда получены данные и когда отправлены.

Чтобы не усложнять протокол обмена с MATLAB (а он состоит из посылки всего одной строки) наблюдение за характеристиками реального времени проводятся в программе FreeMaster. Как было замечено раньше зарядник оснащён RTOS и может одновременно поддерживать несколько каналов связи. Один из каналов обслуживает протокол FreeMaster по TCP поверх USB. Интересно то, что работа всех каналов связи нагружает процессор в среднем не более чем на 10%.

Как видно из графика в окне FreeMaster в процессе работы алгоритма в среде MATLAB на ПК интервалы времени соблюдаются достаточно точно. В данном случае разброс не превышает 60 мкс. В худшем случае, когда на ПК одновременно запускались другие программы такие как: браузер, MS Office, антивирусы, разные CAD-ы, компиляция проектов в IDE с использованием всех ядер процессора разброс мог достигать 2 мс. Это все ещё очень хороший показатель жёсткости соблюдения реального времени.
Безопасность зарядника при сбоях работы ПК обеспечивается тем, что зарядка отключается как только теряется USB и TCP соединение. Также отключается нагрузка от аккумулятора если он разряжался в этот момент.
Заключение
Технология SIL с прямым управлением зарядником из среды MATLAB оказалась очень удобным инструментов в разработке алгоритмов. С её помощью удалось в течении нескольких дней получить исчерпывающую информацию о поведении аккумуляторов из разных состояний и в разных режимах использования. Были также обнаружены и нейтрализованы специфические аномалии в поведении чипа DCDC преобразователя LTC3789. В результате на выходе имеем надёжный алгоритм зарядки на языке C для целевой платы практически не нуждающийся в интеграционном тестировании.

Файлы модели для изучения находятся здесь.
Комментарии (16)

ViacheslavMezentsev
18.10.2022 08:50Поэтому к такой модификации следует прибегать когда действительно необходимо, например когда микроконтроллер не содержит сопроцессор операций с плавающей точкой, как ARM Cortex-M0 или ARM Cortex-M33 или когда подобных фильтров в модели очень много.
К примеру, если я хочу использовать в Simulink для CM0 библиотеку Qfplib (для CM0), чтобы работать с float'ами. Для обычной IDE я знаю как это делать:
float temp30_cal = qfp_uint2float( * ( uint16_t * ) TEMP30_CAL_ADDRESS ); float temp110_cal = qfp_uint2float( * ( uint16_t * ) TEMP110_CAL_ADDRESS ); float temperature = data; temperature = qfp_fsub( qfp_fdiv( qfp_fmul( temperature, vdd ), 3.3f ), temp30_cal ); temperature = qfp_fmul( temperature, qfp_fsub( 110.0f, 30.0f ) ); temperature = qfp_fdiv( temperature, qfp_fsub( temp110_cal, temp30_cal ) ); value = qfp_fadd( temperature, 30.0f );Как подключение и использование такой библиотеки будет выглядеть в Simulink? У меня фильтрация как раз сделана на основе этой библиотеки. Или вопросы компактности кода для бедных?
Один из каналов обслуживает протокол FreeMaster по TCP поверх USB.
RNDIS? Или какой-то проброс потока UART'а?

Indemsys Автор
18.10.2022 11:00+1В MATLAB есть энтузиасты портирующие разные библиотеки. Например CMSIS там есть штатно в списке выбора библиотек.
Но я когда сталкиваюсь с младшими ARM-ами все же перехожу на целочисленную арифметику. В MATLAB есть тулсы для автоматизации и верификации этого процесса.Для связи использую разные техники, можно прочитать тут: https://habr.com/ru/post/676120/ и тут https://habr.com/ru/post/582742/
ViacheslavMezentsev
18.10.2022 11:44Не получается с NXP подружиться (подтвердить e-mail) даже через свой VPN. Не могли бы вы приложить этот FreeMaster (дистриб и SDK), хотелось бы на него глянуть.
Indemsys Автор
18.10.2022 14:04Там сегодня барахлит связь видимо. Мне самому отказали, хотя я был зарегистрирован. Попробуйте ещё раз.
Сам дистрибутив около 400 Мбайт. Мой канал сейчас не такой толстый.
ViacheslavMezentsev
18.10.2022 15:01Надо было написать, что я украинец. Дистрибы я нашёл в телеге. Помогли добрые люди.


beeptec
18.10.2022 22:59+1Лично мне в публикации для сравнения того, как бы я это сделал быстрее на ПК своими средствами, не хватило аппаратного алгоритма процесса на уровне описания конкретного дата шит тестируемого аккумулятора.
Скажем опытному инженеру со знанием LabVIEW такой софт вполне реально запилить ничуть не медленнее с более наглядным мониторингом процессов в реальном времени, включая построение всевозможных триггеров и генерированием отчетов в удобном формате...
Автор скромно умалчивает сведения о своих протертых джинсах в процессе освоения среды разработки.Indemsys Автор
18.10.2022 23:43Да, Simulink и LabView по функциональности очень похожи в каких-то смыслах. Библиотеки DSP блоков почти идентичны. Но аналога Stateflow я в LabView не нашел.
Максимум что там увидел - это события. Но это какие-то графические монстры.
Вряд ли вы сможете один в один перенести модель из Simulink Stateflow в LabView. Чистые Simulink модели есть шансы перенести.
В LabView, на мой взгляд, не смогли найти гибридный подход. Тем же страдает и Node-RED сейчас. Либо они сознательно не затачиваются на такое, а ориентируются на пользователей попроще.
beeptec
19.10.2022 00:36В свою очередь не думаю, что Simulink Stateflow обладает преемственностью модели LabVIEW. Это принципиально разные продукты сугубо для своих задач.
Simulink интегрирован с MATLAB и больше рулит в области моделирования, имитации и анализа динамических систем.
LabVIEW может использоваться на всех этапах технологических процессов: от моделирования и разработки прототипов продуктов до широкомасштабных производственных процессов, к примеру таких которые присутствуют в проекте SpaceX.
Мне лично вполне хватило LV для построения нужных мне конечных автоматов с внешними коммуникациями и в целом фреймворка с абстрактным графическим интерфейсом для программной симуляции контроллера и внешнего аппаратного управления посредством I/O.Indemsys Автор
19.10.2022 09:58Я честно говоря сомневаюсь в некоей фантастической масштабируемости LabVIEW по сравнению с Simulink. Визуальные компоненты в окне LabVIEW перегружены графической атрибутикой, замыливают глаз, рассеивают внимание.
Это типичный подход детских конструкторов, где форма важнее содержания.
На таких кирпичиках таких крупных моделей как в Simulink Stateflow не думаю что можно построить. Но и Simulink не самый лучший подход для масштабирования до тысяч переменных. Не знаю. Думаю графические нотации тут еще хромает. Скажем я не нашел вариантов как быстро сгенерировать массив подсистем с динамически изменяемым размером массива. Но может это не в логике риалтайма, потому и нету.То что у LabVIEW больше интерфейсов к различному оборудования не спорю. Но это как раз в моем случае менее всего интересно. Чем проще протокол, тем легче на нем сделать реальное время. У LabVIEW до последнего времени даже документации в открытый доступ не было выложено. А ведь они неплохо начинали лет 10 назад. Тогда я из под LabVIEW легко мог сгенерить софт для STM32 и он даже содержал RTOS RTX! А потом они это куда-то забросили.
beeptec
19.10.2022 13:23Подозреваю что LV Вам лет 10 уже как не интересен, от того и такие Ваши доводы.
На самом деле есть там все хотелки, от которых вы сетуете в куче с тулсом Real Time, собственно не знаю какой класс реального времени Вы имеете в виду, да и дисклеймер там весьма увесистый со своим много тысячным комьюнити под чутким экспертным сопровождением специалистов на портале NI
Хотите дружите с NI проприетарным хардом, не хотите, никто не запрещает работать стандартными коммуникациями, если умете и понимаете протоколы транзакций. Практически присутствуют все драйвера включая попсовый UART... с которым сегодня только ленивые не работают, что было продемонстрировано в моем примере.
Но как говорится на вкус и цвет... не агитирую и не настаиваю.Indemsys Автор
19.10.2022 18:09Мне LabVIEW очень интересен, но я не нашёл там аналога Stateflow.
Если знаете что он там точно есть, то подскажите как он там называется.

beeptec
19.10.2022 20:50Вопросы интеграции Stateflow в LabVIEW
Возможно Вам понадобится воспользоваться Simulation Model Converter.
Так же есть неплохой видео туториал интеграции на примере проекта с видеокамерой.
Как ранее говорил, для ясности, чтоб сравнить обе парадигмы обеих сред разработки, было бы неплохо дать на вербальном уровне какой нибудь алгоритм аппаратного управления.Indemsys Автор
20.10.2022 00:44Спасибо за наводку.
Нашел у них аналогичный тулс - https://www.ni.com/docs/en-US/bundle/labview-statechart-module/page/lvschowto/sc_h_label.html
Как я и подозревал, LabVIEW стремиться полностью копировать всю функциональность MATLAB, а MATLAB берет у LabVIEW
В индустрии обычная практика. Как все CAD-ы копируют функциональность друг у друга, все EDA и все IDE.Но вообще говоря рисовать в таком стиле меня не привлекает
Алгоритм процесса зарядки я вам дать иначе чем в виде диаграмм Simulink не могу.
В даташитах на аккумуляторы тоже никто не пишет алгоритмы.
Там будет несколько неразборчивых графиков заряда-разряда для одной температуры и не более того.
Реальные характеристики аккумуляторов от тех графиков могут отличаться в разы. Еще хуже когда алгоритм надо научить работать без поправок с разными моделями аккумуляторов.
Поэтому я модели создаю сразу в симулинке, сразу их там запускаю и сразу рефакторю.
С тех пор как была опубликована эта статья, я уже несколько раз поменял модель. И она теперь выглядит по другому. Просто вскрылись новые нюансы поведения аккумулятора.
Рефакторинг у меня не прекращается ни на день. Даже если вы сделаете полный аналог опубликованной модели, у меня к тому времени уже будет другая, потому что модель еще очень далека от идеала. Потому собственно я и моделирую, а не пишу на C.Simulink де-факто стандарт описания и документирования моделей. LabVIEW тут немного опоздал.

beeptec
20.10.2022 08:07Для успешного продвижения, я бы обратил внимание на авторитетный опыт специализированных ресурсов, посвященных этой тематике. Зачастую, там можно найти подробнейшие тесты и многочисленные отзывы от конечных пользователей различных аккумуляторов. Там же и обзоры профессиональных ЗУ.
Далее анализ и моделирование всех контролируемых величин, режимы, параметры и т.д. и т.п., разработка дизайна и топологии Вашей системы с прототайпингом и верификацией по отношению к существующему опыту.
Иначе это не выходит за хоббийный домашний уровень.
Больше чем уверен, быструю разработку реально делать в любой среде программирования, когда Вы мультидисциплинарный синьор и знаете к какой комфортной среде обращаться при тех или иных клиентских запросах. Пусть врачи хирурги меня поправят, если я не прав :)
Как то так.
dilvar
было бы интересно посмотреть на результирующий Си код
Indemsys Автор
Тут не так все просто, есть куча настроек, вариации которых могут могут выдать очень отличающийся код. Думаю написать для этого отдельную статью.
Но если в общем интересует как выглядит код, хотя бы приблизительно, то он есть весь в этой статье https://habr.com/ru/post/581468/