
За свою долгую историю дисплеи претерпели множество изменений, которые тем или иным образом их совершенствовали, позволяя лучше выполнять свою основную функцию — визуальное отображение информации. Современный человек сталкивается с дисплеями практически на каждом шагу: мониторы компьютеров, экраны смартфонов, кассы самообслуживания, рекламные щиты и т. д. Учитывая столь высокую популярность среди потребителей, не удивительно, что научное сообщество также уделяет внимание дисплеям, а точнее поиску методов их совершенствования. Ученые из Иллинойсского университета в Урбане-Шампейне (США) разработали новый тип дисплея, вдохновленный хамелеонами и осьминогами. Основой разработки стали роботизированные «плавники» с капиллярным управлением. Из чего именно сделан новый дисплей, как он работает, и чем он отличается от своих сородичей? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Нет ничего удивительного в том, что ученые из самых разных отраслей науки ищут вдохновение в природе. В данном случае источником вдохновения стали хамелеоны и осьминоги. Хамелеоны известны своей неторопливостью, меткостью во время охоты и, естественно, умением маскироваться, изменяя окрас своей кожи (1A).
Эта удивительная способность реализуется за счет определенных кожных придатков, управляемых жидкостными средами. Животное может менять окрас того или иного участка кожи либо путем растяжения заполненных чернилами эластичных мешочков (хроматофоры головоногих моллюсков), либо путем выделения/отвода жидкости из пористых фотонных структур (щитоноски). Жидкости играют важную роль не только в маскировке, но и для других вариантов изменения придатков кожи. К примеру, путем связывания тонких волосков в мехе выдры для регулировки температуры или на лапках жуков для изменения адгезии.
Важнейшими преимуществами этих механизмов отображения и преобразования текстуры кожи являются их мультимодальность (цвет, температура, текстура и адгезия), многофункциональность (маскировка и регулирование температуры) и механическая гибкость при использовании только сверхнизкой мощности по сравнению с энергоемкими светоизлучающими полупроводниковыми устройствами. В природе динамически изменяющиеся придатки обладают сохраняемостью состояния, т. е. способностью использовать малое энергопотребление для переключения визуального проявления, а затем сохранять новое состояние с минимальными затратами энергии.
В рассматриваемом нами сегодня труде ученые решили создать гибкие придатки, которые способны взмахивать под большими углами за счет гидродинамического действия капель жидкости. Сверхмягкие плавники прикреплены у основания к мокрым ячейкам, называемыми флапфорами (сокращенно «flap4»). Мокрые ячейки предназначены для работы в массивах, образующих пиксельную кожу, где каждая ячейка индивидуально переключается под контролем жидкости через поры эпидермиса. Пора связана с сетью жидкости, клапанами и моторизованными шприцами. Подвижный плавник переключается между двумя состояниями: прямым и изогнутым, которые являются нормальным и параллельным субстрату соответственно. Переключение контролируется скоростью дренажа из эпидермального отверстия, расположенного рядом с плавником с одной стороны.
При медленном дренаже плавники демонстрируют режим работы с преобладанием капиллярности, когда плавник отклоняется в узкую сторону (режим N). При высокой скорости дренажа наблюдается режим с преобладанием давления всасывания, когда плавник отклоняется в широкую сторону (режим W).
Ячейки flap4 в результате были использованы для построения многопиксельного дисплея, где каждая ячейка представляет собой отдельно управляемый пиксель. Также была реализована оптическая/инфракрасная многоспектральная передача сигналов за счет контраста между цветом плавника и фоном ячейки и капель разной температуры для одновременного создания ИК-контраста.
Результаты исследования

Изображение №1
На видео №1 (видеоматериалы внизу статьи) показан биморфный flap4. Когда камера заполнена жидкостью, плавник находится в вертикальном положении из-за закрепления жидкости в верхнем углу плавника. По мере того как жидкость медленно дренируется через пору, которая находится на широкой стороне (режим W) ячейки, плавник притягивается к стенке на узкой стороне (режим N). Складывается впечатление, что отрицательное давление дренажа жидкости отталкивает плавник к другой стороне мокрой ячейки.
Увеличение скорости потока (q) приводило к тому, что плавник переходит от изгиба в сторону узкой стороны (режим N) к изгибу в сторону широкой стороны, где применяется отрицательное давление всасывания (режим W) (1B). На 1C показан систематический график скоростей потока для получения двух режимов flap4.
Чтобы обеспечить такое поведение, плавники должны быть очень мягкими. В противном случае их жесткость на изгиб ограничивает большую деформацию, связанную с режимом W. Чрезвычайная податливость позволяет плавникам оставаться в дренированном состоянии, будь то режим N или режим W. Это постоянство в обоих состояниях связано с тем, что капиллярные силы на один порядок выше, чем упругая восстанавливающая сила в любой из прямых (режим N) или изогнутых (режим W) конфигураций. Для достижения этих характеристик использовался мягкий полимерный поливинилсилоксан. Толщина (b) плавника составляла менее 0.5 мм, а ширина (d) — до 5 мм.
Плавник возвращался в исходное положение, когда ячейка снова заполнялась жидкостью. Экспериментально было определено пороговое значение потока (q), выше которого плавник переключается в колебательный режим W. Это пороговое значение уменьшалось с увеличением длины плавника (l) или ширины узкой стороны (N) (1D). Были проведены дополнительные опыты для определения связи между шириной узкой (N) и широкой (W) сторон плавника. Была выбрана оптимальная конфигурация, в которой расстояние между плавниками составило 0.4 мм, а W — 4 мм (1E). В качестве используемой в системе жидкости выступило минеральное масло.
Чтобы понять механизм изгибания биморфного плавника в узкую (N) и в широкую (W) стороны, ученые рассмотрели путь течения жидкости при дренировании через пору (1E), расположенную на нижней поверхности широкой стороны.
В то время как дренаж внутри широкой стороны определялся нисходящим потоком к порам, дренаж с узкой стороны был обусловлен потоком, просачивающимся через небольшие зазоры (s), где жидкость испытывала большой перепад вязкого давления. Именно это ограничение потока дренажа вытягивает плавник в широкую сторону за счет создаваемого высокого давления всасывания Δps = p1 − p2.
Ученые отмечают, что давление всасывания увеличивалось со скоростью дренажа (u), поэтому плавник переходил в режим W только при скоростях выше определенного порога. Когда скорость дренажа меньше, чем этот порог перехода, мениск* между плавником и стенкой в узкой части тянул плавник в узкую сторону из-за давления Лапласа: Δpc ~ γκ, где γ — поверхностное натяжение, а κ — искривление мениска жидкости.
Мениск* — искривление свободной поверхности жидкости вследствие ее соприкосновения с поверхностью твердого тела или другой жидкости. Образуется в каналах и порах, около стенок сосудов, у края тел, помещенных в жидкость.Поскольку плавник имеет незначительную жесткость, он отклонялся в узкую сторону при низкой скорости дренажа из-за отрицательного капиллярного давления. По мере увеличения скорости дренажа баланс между Δps и Δpc описывает переход между двумя состояниями N и W.
Для теоретического предсказания потока (q) для реализации перехода между состояниями (1E) ученые уравновешивали силы, действующие на плавник: капиллярную из-за кривизны мениска и всасывающую из-за гидродинамического дренирующего потока.
В простейшей модели предполагается, что мениск жидкости тянет мягкий плавник в узкую сторону, так как N < W (сильное капиллярное давление при N), и пренебрегается капиллярной силой, тянущей в широкую сторону. Капиллярная сила действует в соответствии с областью отрицательного давления выше определенной высоты, поэтому она определяется эффективной площадью (Ae).
Если выразить эффективную площадь через формулу Жюрета (h ~ γ/(ρgN), то получится Ae = hd, где ρ — плотность жидкости; g — ускорение свободного падения. Высота по Жюрену учитывается, так как плавник длиннее капиллярного подъема.
Комбинация капиллярного давления (Δpc ~ γ/N) и эффективной площади (hd) позволяет получить силу Fc ~ γhd/N. Эта сила преобладает над изгибом плавника в сторону узкой стороны ячейки при квазистатическом дренаже. Однако по мере увеличения скорости потока динамическое давление всасывания (Δps) возникает из-за дренирования и действует в направлении, противоположном капиллярной силе. Давление всасывания, приводящее в движение поток вязкой жидкости, составляет Δps ~ μub/s2. Соблюдая непрерывность потока, u может быть выражено как u ~ q/(ls). Комбинация давления всасывания (Δps ~ μub/s2) и площади поверхности плавника (dl) позволяет получить тяговую силу Fs ~ μubdl/s2. В текущих экспериментах b ~ с, поэтому Fs ~ μubdl/s. Эта сила преобладает над изгибом плавника в сторону широкой стороны при высокой скорости потока.
Конкуренция между капиллярной и всасывающей силами (Fc ~ Fs) дает представление о переходе состояний между режимом W и режимом N. Когда Fc < Fs (режим W), плавник в конце концов отклоняется в сторону, потому что всасывание превышает изгиб капилляра в точке N. Когда Fc > Fs (режим N), когда всасывающего натяжения недостаточно для преодоления капиллярных сил, плавник изгибается в узкую сторону. Баланс сил (Fc ~ Fs) дает:
Ca ~ (λϕ)-1
где Ca = µu/γ — капиллярное число, λ = l/h — безразмерная высота Жюрена, ϕ = N/s — коэффициент утечки.

Изображение №2
Помимо биморфного подвижного плавника, более сложные, полиморфные flap4 состояли из нескольких плавников и дренажных пор, имеющих несколько режимов взмаха. Например, ячейка с двумя плавниками (2A) имела четыре режима: «цветение», взмах вправо, взмах влево и проникновение.
При медленном дренировании с любой стороны или с обеих сторон одновременно два плавника сливаются и протыкают поверхность раздела жидкости, что напоминает режим N, но для симметричной ячейки. Быстрый дренаж с обеих сторон заставляет плавники изгибаться наружу, и этот режим цветения напоминает режим W. Быстрый дренаж только с одной стороны заставляет оба плавника наклоняться в эту сторону вслед за потоком.
Рассматривая двойной плавник как симметричную конструкцию двух зеркально расположенных одинарных плавников, теоретическая модель одинарного плавника использовалась для захвата двух различных режимов двойного (проникающего и взмахивающего) (2B).
Комбинация из четырех взмахивающих плавников и двух дренажных отверстий на концах дает в результате пятирежимные полиморфные ячейки flap4 (2C). Симметричные случаи всех взмахов или вправо, или влево достигались высокой скоростью дренажного потока с одного направления, тогда как полностью симметричный режим достигался высокой скоростью потока из обеих пор одновременно.
Конфигурации, в которых была нарушена симметрия, достигались за счет управления временем начала дренажа. Например, когда сначала дренировалась жидкость с левой стороны, а затем через несколько секунд с правой, то только три крайних левых плавника взмахивали влево, а самый правый плавник вправо.
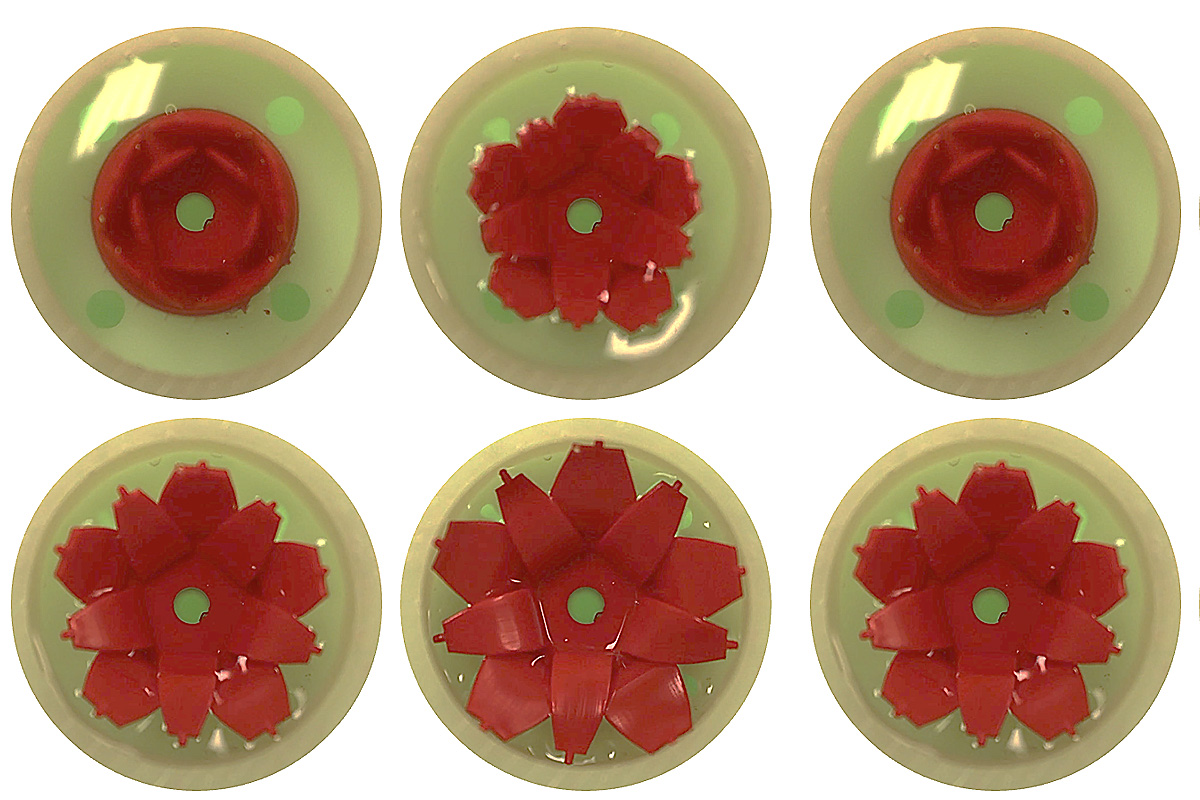
На 2D представлены радиальные и трехмерные flap4, такие как цветущие цветы, где каждый плавник ведет себя как лепесток. Данная конфигурация демонстрирует два режима: цветение (боковой дренаж) и закрытие (скважинный дренаж).

Изображение №3
Комбинация нескольких flap4 ячеек в массив позволяет создать многопиксельную мультимодальную мягкую дисплей-панель. Каждый пиксель имеет взмахивающий плавник, который отражающим образом создает включение/выключение контраста из-за темно-синего цвета плавника, создающего контраст с желтым цветом фона. На 3A показан механизм взмахивающего движения одного плавника, контролируемого дренажом пор. Также был создан массив 3 х 3 ячейки, каждая из которых контролировалась селективным дренажом (3B). Методика изготовления массива показана на 3C.
Во время дренажа из открытой поры плавник взмахивает в горизонтальную конфигурацию и остается в таком положении из-за захваченного мениска, таким образом оставаясь во включенном состоянии. Путем индивидуального манипулирования каждой ячейкой в массиве можно было получить различные символы (например, UIUC на 3D).

Изображение №4
Учитывая, что для активации ячеек использовались капли жидкости, температура может быть фактором влияния на создание ИК-паттернов в дополнение к оптическим отражающим паттернам. Была создана система для независимого управления ИК-диаграммой путем подключения источников жидкости с различной температурой к определенным порам на каждой ячейке. Данная конструкция также гарантировала, что плавники могут колебаться в двух стабильных конфигурациях (правой или левой), создавая при этом резкий температурный градиент по обеим сторонам, используя поток жидкости через поры. Это приводило к формированию одновременных многосигнальных оптических/ИК систем кодирования.
Для одного из примеров (4A) ученые сначала залили холодную жидкость в камеру, а затем дренировали ее с правой стороны. Это приводило к тому, что плавник взмахивал в правую сторону. После этого подавалась горячая жидкость с левой стороны, чтобы различить температурный сигнал в ИК-области. Комбинация температуры жидкости и местонахождения дренажа позволяет разработать материалы с трехзначным двоичным кодированием, показывающие в общей сложности восемь различных состояний устройства (4B).
Чтобы продемонстрировать полную последовательность оптического/ИК-кодирования, ученые установили температуру жидкости (минерального масла) на уровне 22 °C для холодного © и 50 °C для горячего (H) состояний, а затем последовательно заполнили и дренировали жидкость в различных комбинациях, чтобы последовательно получить восемь состояний устройства. Полная последовательность была записана, а графики, описывающие последовательность управления потоком, и соответствующие снимки экрана показаны на 4C. Каждый первый дренаж приводил к тому, что плавник взмахивал. Для различных температурных сценариев (CH или HC) ученые повторно дренировали подаваемую жидкость после взмаха, чтобы избежать проблем со смешиванием и сохранить начальное состояние.
Эта новая система кодирования может создавать два разных сигнала в двух разных областях, поэтому ее также можно использовать в устройствах ИК или оптической маскировки. В качестве примера показаны два сценария мультисигнального кодирования: графический и двоичный (4D). В графическом примере контрастная форма пикселей отображает определенную фигуру на многопиксельном дисплее (в данном случае «OK»). В то же время градиенты температур по каждому пикселю графически отображают иной сигнал (в данном случае «NO»).
Видеоматериалы к исследованию:
Видео №1: биморфный плавник.
Видео №2: численное моделирование одноплавникового устройства с использованием модели пониженного порядка.
Видео №3: полиморфный двойной плавник.
Видео №4: полиморфные четыре плавника («домино»).
Видео №5: биморфные лепестковидные плавники («цветок»).
Видео №6: устройства с многопиксельным дисплеем.
Видео №7: система ИК-кодирования с регулированием температуры.
Видео №2: численное моделирование одноплавникового устройства с использованием модели пониженного порядка.
Видео №3: полиморфный двойной плавник.
Видео №4: полиморфные четыре плавника («домино»).
Видео №5: биморфные лепестковидные плавники («цветок»).
Видео №6: устройства с многопиксельным дисплеем.
Видео №7: система ИК-кодирования с регулированием температуры.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые провели исследование динамики ультрамягких плавников под действием капиллярного гидродинамического жидкостного эффекта. Разработанная система состояла из ячеек, оснащенных плавниками и порами, через которые проводился дренаж жидкости разной температуры. Данные ячейки представляют собой своеобразные пиксели. Изменение объема жидкости внутри такого пикселя приводит к изменению положения плавника, а изменение температуры жидкости позволяет достигать взаимосвязи между отдельными ячейками с помощью инфракрасной энергии.
Как отмечают ученые, эти необычные пиксели могут быть спроектированы так, чтобы внутри располагалось более одного плавника, а форма пикселя (ячейки) может быть не только кубической. Еще одной важной особенностью разработанной системы является возможность с ее помощью посылать два одновременных сигнала: один можно увидеть человеческим глазом, а другой можно увидеть только с помощью инфракрасной камеры. Этот эффект достигается за счет регулирования температуры используемой жидкости.
Среди недостатков системы стоит отметить гравитацию. Дело в том, что такой дисплей может работать только в горизонтальном положении. Стоило его повернуть на 90 градусов, как производительность сильно снижалась. Однако, как отмечают ученые, эту проблему можно преодолеть путем уменьшения капель жидкости. Пример такого поведения мы можем наблюдать во время дождливой погоды, когда маленькие капельки воды буквально застревают на вертикальной поверхности окон. Если капли жидкости, используемые в системе, уменьшить в 5 раз, то гравитационные силы более не будут иметь на них столь сильного влияния. Следовательно, такой дисплей сможет работать в вертикальном положении.
По словам авторов разработки, их творение является чем-то совершенно новым в области дисплеев. Пока концепция еще сыровата, но после совершенствования она может стать конкурентной альтернативой используемых в данный момент дисплеев, учитывая ее простоту, низкую стоимость и высокую энергоэффективность.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
AlexAlll
внешняя поверхность лепестков цветка хорошо бы была зеленая...