

В этом посте мы расскажем, как дошли до идеи отказа от использования радара при фотовидеофиксации нарушений на дорогах. А также о том, как: подружили камеры с сверточными нейросетями, научили эту дружную «компанию» отличать грузовики от легковушек, точно фиксировать скорость и направление движения, а заодно засекать проезды на красный свет.
Если вы следите за индустрией автономного вождения, то могли слышать о том, что инженеры Tesla постепенно отказываются от ультразвуковых датчиков и лидаров в пользу компьютерного зрения. На недавнем опыте мы убедились, что этот прогрессивный подход работает не только в системах автономного вождения.
С помощью камер можно не только управлять машиной, но и оснастить дороги системой мониторинга транспортной безопасности, не зависящей от данных с радара и постоянного подключения к интернету. А заодно можно сделать такую систему более дешевой и практичной.
Старт проекта
После того, как мы реализовали систему распознавания ДТП по видео с дорожных камер, заказчик поставил новую задачу — разработать ПО для стационарного комплекса фотовидеофиксации дорожных нарушений (КФВФ), способное в режиме реального времени контролировать скорость транспорта. В перспективе новая система должна стать более доступной по цене заменой программным решениям от зарубежных вендоров.
Софт и оборудование
ПО комплекса фотовидеофиксации не раздает штрафы — за это отвечают вышестоящие IT-системы. Так что нашей задачей было создать ПО для распознавания номеров, генерации bbox, формирования треков и измерения скорости движения транспортных средств.

Что до технических средств, то конструктивно комплекс состоит из четырех устройств, закрепленных в статичном блоке на столбе у автотрассы:
микро-ПК Nvidia Jetson Nano;
черно-белой IP-видеокамеры;
инфракрасной подсветки;
радара.
Вместе они позволяют в режиме реального времени наблюдать за транспортным потоком и сохранять данные об автомобилях. Даже если комплекс останется без связи с «центром», например, из-за обрыва интернет-кабеля, данные останутся в памяти микрокомпьютера.
Микрокомпьютер

Jetson — зрелая платформа с подробной документацией, но ограниченной вычислительной мощностью. Так что запуск на ней нескольких нейросетей стал интересным профессиональным вызовом.
Нам долго не удавалось достичь обработки видеопотока с частотой (FPS), достаточной для трекинга транспортных средств с приемлемой погрешностью. Прежде чем попасть в нейросеть, сигнал проходит через буфер камеры и серию подготовительных процедур. К тому же, чем выше FPS, тем сложнее железу обрабатывать видеопоток в реальном времени.
IP-камера
Здесь нас ждал сюрприз. Большинство популярных IP-камер работает на потоковом протоколе RTSP, который выдает наружу видеотрансляцию с настройками из коробки.

Наш аппарат предполагал полностью ручную настройку видеопотока. Помимо опенсорсной библиотеки Aravis, к нему прилагался еще и специальный фреймворк. Здорово иметь прямой низкоуровневый доступ к «железу» через буфер обмена камеры, но, начиная разработку, мы даже не предполагали, что придется на ходу разбираться в нюансах работы черно-белой матрицы.
Радар
Обычно радар — это основа комплекса фотовидеофиксации. Логичный выбор, ведь на точность радара почти не влияет погода и освещенность. Однако комплекс все равно ограничен качеством картинки с видеокамеры, ведь, чтобы его показания можно было использовать, они должны сопровождаться четким снимком номерного знака автомобиля. При этом радары имеют существенный недостаток — высокую стоимость. А еще их стало сложнее закупать из-за санкций.
В общем, отказ от радара мог бы заметно удешевить и упростить весь комплекс. Мы решили, что попробуем добиться сопоставимой точности видеофиксации при помощи одной только камеры и нейросетей. Заказчик поддержал идею, но с оговоркой. В первую очередь мы должны реализовать поддержку радара, а затем уже думать о том, как комплекс будет работать без него.
Нейронные сети и архитектура проекта
Проект стартовал на Python — так проще работать с гипотезами. Его основой стала YOLO — нейронная сеть, которая за один проход прогнозирует для изображения положение ограничивающих прямоугольников и вероятности классификации. В сочетании с методом немаксимального подавления (NMS) этот алгоритм позволяет значительно повысить точность локализации объектов и уменьшить число ложных срабатываний.
В процессе разработки мы запускали на Jetson до 6 нейросетей, но им там было тесновато. Так что мы пошли по пути объединения нейронок, занимающихся отдельными задачами детекции, например определением ТС и плашек ГРН. Взяли облегченный вариант модели YOLOv5s, научили распознавать номера и заточили под наши задачи. Для дообучения мы подготовили новый набор данных на основе датасета COCO и сократили число классов распознаваемых объектов до пяти: "numberplate", "car", "truck", "bus", "motorcycle".
При разработке модулей, работающих с изображениями и нейронными сетями, использовали библиотеки для работы с CUDA/cuDNN и OpenCV, а нейронки обучали на PyTorch.
Применение фреймворка ENOT позволило поднять быстродействие нейросетей на микрокомпьютере почти в 2 раза. Правда, вместе с ускорением произошел и значительный рост потребления оперативной памяти, поэтому от него пришлось отказаться.
В итоге мы остановились на чистом TensorRT, который при сравнительно небольшом весе потребляет заметно меньше оперативной памяти и выдает отличную производительность. После всех экспериментов мы добились стабильной обработки 20 кадров в секунду (этого достаточно для надежного отслеживания движения) и сократили число задействованных нейросетей до двух:
Детектор — находит на картинке с камеры транспортное средство и его номер.
Распознаватель (OCR) — считывает символы на номерных знаках.

В случае OCR большой сложностью стало распознавание номеров на иностранных автомобилях. Многие используемые в них символы не встречаются на российских номерах и сильно затрудняют идентификацию.
Мы пытались найти подходящий готовый датасет и даже просто достаточный объем фото для разметки, но номера в доступных наборах данных слишком «удобные» для распознавания: чистые, опрятные и хорошо читаемые. Нейросети, обученные на таком материале, не справляются с грязными и плохо различимыми номерами. Пробовали также использовать автогенерацию примеров, но в итоге единственно правильным выходом оказался сбор и разметка собственного датасета под эту задачу.
Бок о бок с этими двумя нейронными сетями на Jetson запущено ПО для радара, предоставленное заказчиком. Оно проводит измерения и отправляет данные в основное объектное хранилище Minio, а еще выступает посредником между радаром и нашими нейросетями.

Первоначально архитектура системы была монолитной — все входящие в нее нейросети запускались последовательно. Затем, для повышения стабильности и отказоустойчивости, мы разбили архитектуру на контейниризированные микросервисы, работающие асинхронно. В нынешнем виде архитектура КФВФ состоит из нескольких модулей, которые взаимодействуют через In-Memory брокера RabbitMQ.
Аналитический модуль
Взаимодействует с IP-камерой через API и работает над обработкой полученных кадров с помощью нейросетей. Его главный компонент — уже упомянутый детектор ТС, рисующий bounding box (ограничивает цветными рамками объект детекции и отвечает за трекинг). Здесь же происходит детекция сигналов светофоров.

Сервис распознавания плашек ГРЗ
Получает информацию о местонахождении номерных знаков от детектора и запускает их распознавание. Основной компонент этого модуля — нейронная сеть YOLO.
Модуль агрегации
Этот механизм сопоставляет данные с камеры и радара. ГОСТы предъявляют очень жесткие требования к точности измерений на дорогах, так что, если радар подключен к системе, мы используем его по максимуму и сравниваем его показания с результатами работы компьютерного зрения.
Кроме того, при помощи алгоритмов матчинга этот модуль связывает данные из детектора и модуля распознавания плашек ГРМ с данными, полученными с радара. Собранная информация постоянно агрегируется в итоговое сообщение и через RabbitMQ отправляется по сети на обработку в дата-центр. Там данные используются для выявления различных нарушений ПДД, включая пересечение разметки, выезд в зону остановки и так далее.
Модуль определения сдвига камеры
После установки КФВФ на конкретном участке дороги необходимо настроить сервис распознавания: разметить кадр и указать те участки изображения, где следует искать номера.

Точно обозначив зону контроля, мы можем, например, исключить из рассмотрения встречный поток машин, попадающий в поле зрения комплекса. Однако из-за резких порывов ветра, птиц, и даже просто из-за вибрации от проезжающих машин камера со временем может смещаться, а с ней смещаются и зоны детекции. Сильные сдвиги могут вызывать сбои, так что их необходимо засекать при помощи отдельного алгоритма. Мы уже подробно рассказывали о нем в посте о подсчете пассажиров на остановках.
Как работает трекинг и определение скорости
После того, как нейросеть-детектор научилась определять автомобили, мы занимались отслеживанием зафиксированных объектов. При видеофиксации автомобиля алгоритм трекинга присваивает каждому ТС уникальный ID, который служит для этого снимка URL-адресом в базе Minio. ID помогает соотнести детекции на отдельных кадрах с номером конкретного автомобиля.
Следующим шагом после распознавания и отслеживания машин стало определение скорости по анализу изменения местоположения объекта на разных кадрах видео. Это делается при помощи матричного преобразования координат через нахождение матрицы гомографии (homography matrix).
По сути, это набор математических операций, которые позволяют взять кадр из видео, зафиксировать на нем координаты автомобиля и перенести их на двухмерную проекцию трассы. В результате получается вид сверху, как в стратегической игре.
Матрица гомографии вычисляется с помощью функции библиотеки getPerspectiveTransform из OpenCV по формуле:
M — матрица гомографии, x1,y1 — координаты точки на исходном изображении, x2,y2 — координаты точки на перспективе (вид сверху)
Пока ТС находится в зоне работы комплекса. Алгоритм собирает с каждого кадра координаты, указывающие на середину нижней части рамки (bounding box) транспортного средства:

Эти координаты преобразуются в координаты на «виде сверху». В момент, когда ТС выходит из зоны обзора системы, алгоритм отслеживает изменение координат ТС, соотнося его с пикселями на кадре. После чего строит трек ТС на кадре и на двухмерной проекции трассы.
")
В итоге при знании точного местоположения транспортного средства в отдельно взятый момент времени расчет скорости сводится к школьным курсам физики и геометрии. А вот детекция запрещающего сигнала светофора по черно-белой камере могла бы попасть в учебник как задача со звездочкой.
Определение сигнала светофора
Хотя по статистике более 90% нарушений ПДД связано с превышением скоростного режима и игнорированием дорожных указателей, комплексы фото-видеофиксации отслеживают и проезд на красный свет.
Реализовать такую функцию при помощи машинного зрения проще, чем можно подумать. Дело в том, что расположение сигналов светофора зафиксировано в международных правилах. Красный всегда располагается сверху, так что черно-белую камеру не пришлось учить различать цвета. Нужно было лишь найти на картинке сам светофор и зафиксировать момент, когда загорится нужная лампочка. Это можно сделать по изменению гистограммы яркости изображения.
Для определения местоположения светофора можно было использовать еще один детектор объектов. Однако, проконсультировавшись с заказчиком, мы оставили эту задачу сотрудникам, которые устанавливают и настраивают КФВФ. Как и в случае с границами зоны контроля его нужно обвести рамкой.
Отладка и тестирование системы
Перечисленные нейросети и алгоритмы компьютерного зрения требовали тонкой настройки, невозможной в «синтетических» тестах или на парковке у офиса. Требовались полноценные полевые испытания.
Мы начали с того, что получили у заказчика удаленный доступ к пилотному стенду, установленному на загородной трассе. Его приходилось делить со специалистами разных городских служб, но мы сумели подстроиться под их расписание и откалибровать систему.
Сперва специально обученные сотрудники выехали на место установки стенда и выставили на дороге 4 ориентира — «якоря», видимых на камере. Измерив расстояние между «якорями» в физическом мире, мы получили точные данные для расчета матрицы гомографии.
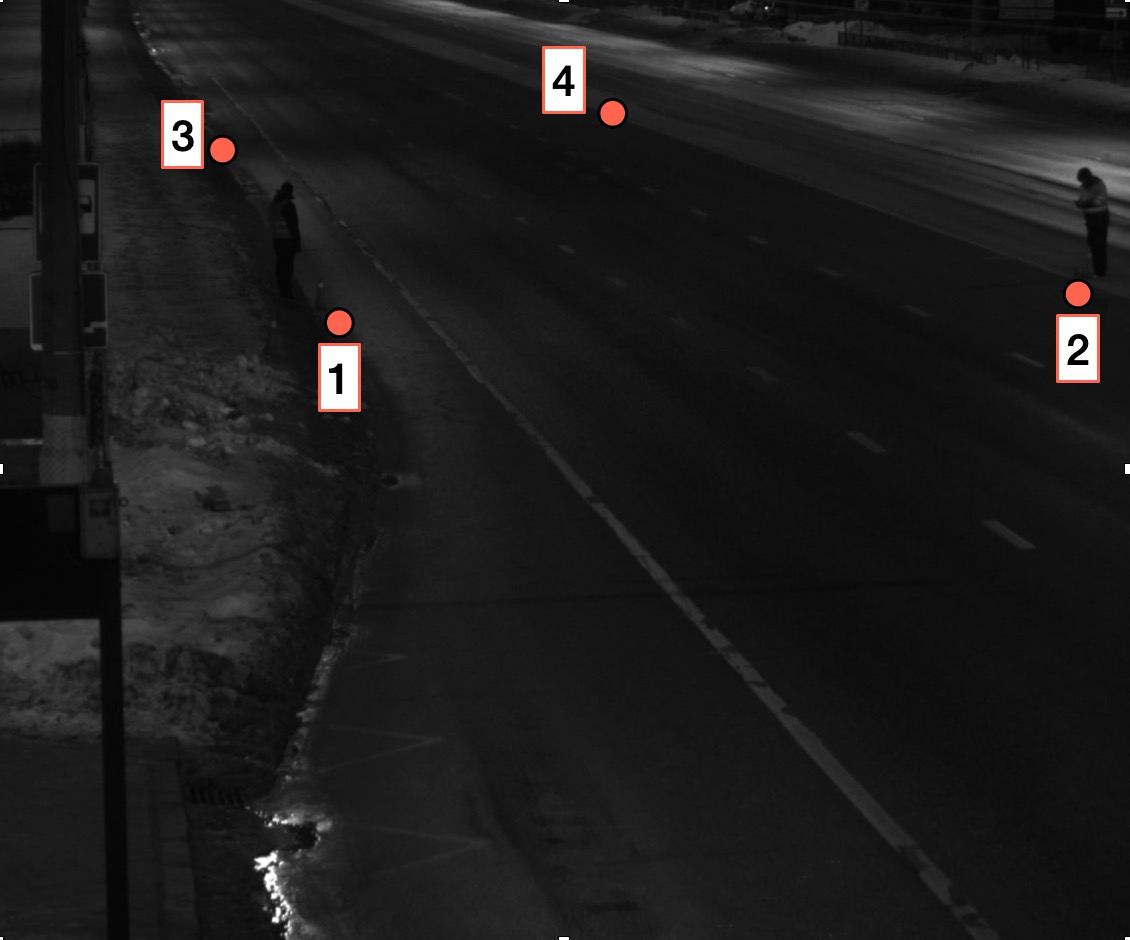
По сравнению с методами разметки на базе различных характеристик изображения (например, vanishing point) это более сложный процесс. Однако ручная разметка точнее. К тому же, на установку КФВФ все равно выезжает целая бригада, которая без проблем может уделить время и установке «якорей». Да, в природе существуют алгоритмы, позволяющие обойтись без них и не потерять в точности, но они используют куда больше камер и в основном применяются для автономного вождения, например в Tesla. Так что это решение оправдано.
Кроме того, мы снимали показания скорости транспортного потока с радара и калибровали по ним алгоритм определения скорости по картинке. Затем пришло время доказать эффективность наших алгоритмов.
Первый показатель, на который ориентировался заказчик в процессе полевых испытаний, — число автомобилей, определенных в общем потоке. Его проверяли во время «итоговых проездов» при помощи отдельной обзорной камеры, которая на протяжении заданного времени записывала на видео все проезжающие мимо ТС. После этого подсчитывали машины на видеозаписи и сравнивали полученное число с информацией в базе данных КФВФ.

Оказалось, что на практике процент распознанных ТС «плавает», в зависимости от загруженности трассы. Большие грузовые автомобили и автобусы иногда закрывают легковушки от камеры. Тем не менее при помощи оптики нам удалось добиться точности распознавания от 90%. Это соответствует нормам ГОСТ для систем фотовидеофиксации на основе радаров.
Второй важный показатель — погрешность при определении скорости. Здесь мы снова ориентируемся на стандарты, принятые для комплексов с «радарным» измерением скорости, так как регуляторки для оптических систем пока просто нет.
Точность измерения скорости проверяли так:
Испытатель садился в машину и брал с собой трекер, определяющий скорость по спутнику. Трекер записывал скорость через определенные отрезки времени, присваивая каждой записи метку времени (timestamp) с точностью до миллисекунды. Эти данные и сравнивали с показателями КФВФ.
Оказалось, что погрешность при определении скорости составила до 5% от абсолютного значения скорости. Таким образом, при скорости 100 км/ч погрешность около 5 км/ч. На скорости в 200 км/ч не более 10 км/ч. Это при том, что нештрафуемый порог превышения скорости в России по прежнему составляет 20 км/ч.
Сейчас мы продолжаем испытания и точную настройку КФВФ. На этом этапе принято решение оставить радар в составе системы, чтобы дублировать работу алгоритма определения скорости с помощью проверенного средства измерения. Но уже можно с уверенностью сказать, что мы побороли первоначальный скепсис по отношению к оптическому трекингу в системе фотовидеофиксации нарушений.
Мы реализовали требования из технического задания:
Определение скорости и номера ТС только по камере.
Сочетание двух методов измерения скорости — оптического и радарного.
Распознавание сигналов светофоров.
Высокую точность распознавания номеров ТС — от 90%.
Высокую точность вычисления расстояния до ТС — до 2 метров (при том, что камера обычно находится на расстоянии 50-70 метров от зоны детекции).
Высокую точность определения скорости ТС.
Соответствие качества материалов фотовидеофиксации требованиям ГОСТ даже при замерах на высокой скорости.
Со временем КФВФ на нейросетях наверняка найдут применение на российских дорогах. Уже в ближайшем будущем метод определения скорости по оптике сможет конкурировать с радарами и лидарами, делая дорожный мониторинг доступнее. Технологии к этому готовы, осталось дождаться изменений в законодательстве.
Комментарии (20)

shadrap
13.07.2023 14:47+1Спасибо. Интересно. А что вы взяли за основу софта камеры? Majestic? И написали свой rtsp?

NutsUnderline
13.07.2023 14:47зашел поглядеть дымящийся мини-пк. Увидел фотку новенького jetson. разочарован.

andi123
13.07.2023 14:47"Со временем КФВФ на нейросетях наверняка найдут применение на российских дорогах."Они там уже есть и вполне себе работают, конечно, в паре с радарами.

Dart55
13.07.2023 14:47+1что придется на ходу разбираться в нюансах работы черно-белой матрицы
Не только разбираться, но и доказать что время между кадрами соответствует измеренному с заданной точностью во всех диапазонах настроек и рабочих температур.

DROS
13.07.2023 14:47Кст., какой максимальный поток джетсон может получать с двух камер без выпадения кадров?

DewT-Mag Автор
13.07.2023 14:47У нас джетсон тянул 20 fps с 2к разрешением, но это именно получение через aravis. Такой fps был выставлен заказчиком на камере. Других экспериментов не проводили

Gold007
13.07.2023 14:47С определением номерного знака вы что-то кастомизировали в yolov5? Ведь слишком мало пикселей для его детекции с учётом того, что камера находится высоко, и судя по видео вы анализируете весь кадр.
DewT-Mag Автор
13.07.2023 14:47У камеры FullHD разрешение, 2440 на 2040, поэтому у автомобилей в части кадра (обычно в половине кадра, зависит от того, как разместить камеру) достаточно крупный номерной знак для распознавания символов. В итоге у нас за трек набирается много распознаваний, мы выбираем те, где лучше видно, и оттуда берем номер.
Gold007
13.07.2023 14:47Спасибо за ответ, но хотел бы уточнить На вход yolo вы же подаете сжатое изображение (480x480) возможно больше, но не FullHD. В случае, если автомобиль занимает значимую часть кадра, конечно работать будет все хорошо. Но на примерах в статье автомобили занимают не так много места в кадре. Получается у вас даже на сжатом изображении нормально детектируется номер?
А вроде понял. Т.е. всегда есть место, где номер корректно распознается. И грубо говоря в далеке вам и не надо детектировать номер.
DewT-Mag Автор
13.07.2023 14:47Еще немного поясню, не очень понятно написал. Тут есть два этапа, сначала детекция плашки с номером, а потом распознавание того, что написано на ней. Что касается детекции, то yolo неплохо умеет находить мелкие объекты, и если дообучить - делает вполне надежно. Она детектирует номерной знак, мы его отслеживаем и выбираем такой кадр, где он будет достаточно хорошо виден чтобы распознать надпись на нем. Вырезаем из кадра знак, решейпим до 480х480 и дальше работаем уже с такой, подготовленной картинкой.
AleksandrRd
Вот так с восторгом современные технари создают очередное “атомное оружие”.
Конечно думают, что создают во благо людям. И с удовольствием копаются в новейшей технологии, не задумываясь какой именно ущерб это нанесет людям и не понимая, что единожды выпустив этого джина из бутылки его обратно не затолкать, даже когда будет понятно, что так делать не стоило....
Ответьте на простой вопрос – какова вероятность, что ваше новоявленное средство измерений покажет скорость некого автомобиля 100500 км/час? Эта вероятность отлична от нуля?
Да вы, ваша компания не имеет отношения к принятию решения о выписвании штрафа. Но человек в погонах будет аргументировать просто – я в этих компьютерах, программах и тем более нейросетях ничего не понимаю, программа написала 100500 км/час значит так и было.
Понятно, что ваша компания не первая и не единственная в продвижении такой технологии, но своя доля ответственности за это у вас есть.
Это лишь подтверждение результатов, а сначала должен быть теоретический расчет, обоснование применяемого метода измерения и его погрешности.
Попробуйте честно рассчитать погрешность измерения скорости. Какие составляющие войдут в эту погрешность? А с учетом трекиннга и детектора нейросети…
Да и подтверждение результатов надо сделать при всех погодных условиях (дожде, снеге и прочее), при различной освещенности, запыленности, задымленности и во всех диапазонах рабочих температур. Потому что всё это влияет на оптику вашей камеры, на прозрачность атмосферы и к какому результату работы нейросети приведет никто сказать не может.
А если мы вспомним, что нейросети принято постоянно переобучать, то эксперимент с подтверждением надо проводить после каждого переобучения, опять же во всех условиях работы средства измерения.
Экономика этой разработки точно сходится, если проводить нормальный цикл испытаний?
Как оно с заявленной "дешевой альтернативой радару"?
Может заказчик был прав со своим скепсисом ;)
andi123
Но человек в погонах будет аргументировать просто – я в этихкомпьютерах, программах и тем более нейросетях ничего не понимаю,
программа написала 100500 км/час значит так и было.
Мягко говоря, вы совершенно не разбираетесь в данном вопросе.
Но в целом, проблема тут в том, что КФВФ это средства измерения, причем сертифицированное. И насколько я знаю, еще никто не смог доказать, что только оптические методы измерения скорости являются таким средством.
AleksandrRd
В том то и дело, что данные комплексы полностью легитимны и имеют тип средства измерений. И человек, в должностные обязанности которого наверняка входит в том числе проверка правильности составления протокола, на основе этой легитимности и внутреннего убеждения в “компьютер не ошибается” просто штампует подсунутые ему программой решения.
Но если нормально, технически поразбираться на основе требований ГОСТ Р 8.674-2009 “ОБЩИЕ ТРЕБОВАНИЯ К СРЕДСТВАМ ИЗМЕРЕНИЙ И ТЕХНИЧЕСКИМ СИСТЕМАМ И УСТРОЙСТВАМ С ИЗМЕРИТЕЛЬНЫМИ ФУНКЦИЯМИ”, то устройства на основе недетерминированных методов измерений (в частности нейросетей) никогда не должны становиться легитимными средствами измерений.
Чтобы сразу было понятно - я разделяю измерители на основе измерения физических параметров - радарные комплексы и устройства на основе недетерминированных методов.
Остальное ниже автору публикации.
andi123
"И человек, в должностные обязанности которого наверняка входит в томчисле проверка правильности составления протокола, на основе этой
легитимности и внутреннего убеждения в “компьютер не ошибается” просто
штампует подсунутые ему программой решения."
Еще раз, вы пытаетесь додумывать за того человека, на основании своего представления "о прекрасном". Оно в корне ошибочно.
Все в цепочке от инженеров разработки КФВФ до инспектора который подписывает протокол в курсе возможностей комплексов. И то что иногда на развлекательных сайтах проскальзывают штрафы на владельцев машин которые едут на эвакуаторах, это не всего лишь крайне редкая ошибка, кожанным мешкам свойственно ошибаться и их за это реально наказывают. И по цепочке наказывают эксплуатанта (и это не ЦАФАП и даже не разработчики), техподдержку разрабов и самих разрабов.
Насчет, того что можно ли доверять нейроночкам. Пока что это проблема с ложноотрицательными исходами (добится 90+ % регистрации), чем с ложно положительными. Кроме нейроночек там еще куча эвристик и бизнес логики, которые не дают ложноположительным исходам отправляться в ЦАФАП.
Не туда воюете.
AleksandrRd
Примеры таких наказаний в студию.
А сколько осталось пострадавших с менее явными ошибками?
Если разработчики были более открыты и не боялись обсуждать эти алгоритмы на профильных ресурсах, доверия к системам возможно бы возросло.
andi123
"Примеры таких наказаний в студию."В каком виде? Начальник Иванов обложил разраба Петрова по матери с лишением премии, потом как на него наорал по телефону эксплуатант Сидров, за то что к нему пришла бумажка из Цафапа от Волкова т.к. ЦАФАП получил кляузу из ОБЛГИБДД, что комплекс прислал нарушение которого по факту не было, что было установлено суд Брянской области. Вряд ли кто-то будет своими грязными портками размахивать на потеху публике.
Разработчики пытаются решать ворохи проблем всплывающих в процессе эксплуатации. Им точно некогда заниматься повышением доверия к комплексам ФВФ.
Я понимаю откуда такой настрой. В обществе укоренилось мнение что все эти камеры чтобы набивать деньгами карманы местных чиновников и ГИБДД. Это не так.
DewT-Mag Автор
Вы правы в том, что неправильная работа такой системы может принести много неприятностей. Особенно с учетом того, что процедура обжалования штрафов оставляет желать лучшего. Именно поэтому мы изначально дизайним все так, чтобы она не совершала подобных ошибок и постарались рассказать об этом в статье.
Вероятность, что наше средство измерений покажет скорость некого автомобиля 100500 км/час нулевая, поскольку машина с такой скоростью не может появиться в ограниченном поле зрения камеры более одного раза, а трек не может состоять из одной точки. Безусловно, расчет погрешности проводился, она состоит из нескольких факторов, таких как погрешность определения рамки ТС детектором, ошибка преобразования координат между изображением и реальным миром, неточности, допущенные при процедуре разметки и т д.
Если какие-то из этих ошибок значительно влияют на работоспособность системы (например, серьезная ошибка при разметке), это выявляется внутренними средствами программного комплекса, которые подадут сигнал, что система не готова к эксплуатации. Некоторые же компоненты просто не могут нанести подобный ущерб, например, если нейронная сеть (которая на самом деле обучена к распознаванию в разных погодных условиях) будет значительно ошибаться в детекциях, это будет моментально замечено трекером. А в нормальной, рабочей ситуации, когда подготовительная работа к установке комплекса выполнена корректно, ошибка не превышает указанных в статье значений. И, разумеется, прежде чем появиться на дорогах, комплекс должен пройти экспертизу в соответствующих органах. Что до "нейросети принято переобучать", все вопросы с обучением нейросети решаются до выхода в прод.
AleksandrRd
Вот вы сейчас уверяете, что вам удалось содать нейросеть со стопроцентно безошибочным распознаванием. На профильном техническом ресурсе ;)
Вы действительно считаете, что это впринципе возможно?
Цифра 100500 была естественно условной и если и появится в протоколе есть хоть какая-то вероятность обжалования только на основе этой цифры. А если там будет 150 вместо 60?
Дело в принципе - вы как участвующий в такой разработке должны понимать, что измерения на основе нейросети это недетерминированный метод. Опровергнуть это можно только составив алгоритм, используя который можно нарисовать рамку трекинга без использования нейросети.
И результат работы этого метода носит вероятностный характер. Да я не сомневаюсь что разработчики приложили все возможные и невозможные усилия, чтобы не было ошибок.
Но такова сама суть метода, пусть вероятность ошибки одна тысячная, одна десятитысячная …. сколько-то но есть. Дальше множим это на миллионы проезжающих авто и получаем количество людей, кому применение такого метода может доставить неприятности. Большие или малые это как повезет.
Недетерминированные методы не должны применяться при подготовке юридических решений, потому как “лучше не осудить виновного чем осудить невиновного”.
Если вы так уверены в своём результате огласите сумму штрафа которую компания как разработчик технологии готова будет выплатить государству и сумму компенсации пострадавшему человеку. Нервные клетки человека в отличие от нейросетей не востанавливаются, так что сумма компенсации должна быть солидной. Опять же это покажет на сколько вы уверены в своем результате, вам же нечего терять, если вероятность ошибки 0.0 % ;)
Вот вам и тема для следующей статьи – опубликуйте этот расчет погрешности с разбором и обоснованием. Расскажите как высобираетесь выполнять требования нормативных документов для присвоения типа средства измерений, например ГОСТ Р 8.674-2009 “ОБЩИЕ ТРЕБОВАНИЯ К СРЕДСТВАМ ИЗМЕРЕНИЙ И ТЕХНИЧЕСКИМ СИСТЕМАМ И УСТРОЙСТВАМ С ИЗМЕРИТЕЛЬНЫМИ ФУНКЦИЯМИ”
Там есть вот такие пункты:
5.3.4 При проведении испытаний, необходимых для проверки соответствия СИ или ТСУИФ требованиям настоящего стандарта, должны быть учтены следующие требования:
5.3.4.1 Основные правила испытаний и определение погрешностей
Требования, указанные в 5.3.1 и 5.3.2, должны быть проверены для каждой соответствующей влияющей величины. Если не определено другим образом в соответствующем нормативном документе на данный тип СИ или ТСУИФ, то применяют эти основные требования при условии, что каждая влияющая величина воздействует и ее влияние должно быть оценено отдельно, а все остальные влияющие величины должны быть поддерживаемыми относительно неизменными на уровне их номинальных значений.
Метрологические испытания должны быть проведены во время или сразу после воздействия влияющей величины. При этом СИ или ТСУИФ должны находиться в рабочем режиме.
А если вы еще и методику испытаний захотите обсудить на профильном ресурсе, доверие к вашим разработкам должно вырасти в глазах технической публики.
Да и известность вашей компании вырастет, а ради чего вы собственно публикуетесь.