
Порой во мне загорается огонек изобретателя, и я часами сижу и что-то паяю/выпиливаю. Так случилось в этот раз. Я загорелся идеей создать свой принтер. Тема создания 3d принтера уже избита, да и материально затратная. Немного подумав, я решил сделать бюджетный вариант принтера, который мог бы рисовать карандашом/ручкой/фломастером. А вспомнив свои попытки нарисовать что-то в стиле Dotwork, я остановил свой выбор на принтере, который автоматизирует именно этот процесс. Итого были сформированы следующие требования к принтеру:
- дешево
- для рисования используются подручные средства
- на выходе получаются рисунки в стиле Dotwork
А когда оказалось, что этот проект можно продвинуть как курсовую работу, было окончательно решено: принтеру быть. Чтобы конструкция получилась не слишком большой, размер области для печати был взят как А5.
Каркас
Процесс начался с поиска схемы для основы. Выбор пал на H-bot, так как он легок в реализации, недорог и, в отличие от CoreXY, в нем не надо резать ремень. Как видно из схемы, потребуется 2 шаговых двигателя, 4 оси и 1 ремень.


Для основы были использованы бруски с сечением 20*40. Конечно, лучше использовать фанеру и вырезать на ней нужные отверстия, тогда конструкция получилась бы более ровной и презентабельной, но из-за того, что кусок фанеры транспортировать и обрабатывать сложнее, были выбраны бруски.
Крепления для направляющих и подшипники к ним были куплены в Китае. Рассчитаны они на направляющие с диаметром 8мм. После непродолжительных поисков было решено сделать оси из спиц для вязания. Дешево, как раз нужной длины, легко распилить. К тому же, как оказалось, на спицах хорошо выдавливаются бороздки подшипниками. Это свойство позволило конструкции свободно двигать вдоль направляющих, несмотря на отсутствие у них параллельности.
Так как это все равно прототип, то линейные подшипники были закреплены проволокой. Крепко, надежно и если что, можно быстро снять.

Двигатель был куплен с шагом 0.9 градуса для наибольшей точности. Когда я поставил двигатели, обнаружилась новая проблема: шляпки на двигателях не подходили к ремню — происходило проскальзывание при полном обороте. Первоначальные попытки снять не увенчались успехом, нагревание/охлаждение никак не помогали, поэтому было принято зверское, но действенное решение:

Чтобы ремень не слетал, весь путь по платформе должен быть на одном уровне. В связи с этим, под подшипники пришлось подкладывать деревяшки, чтобы регулировать их высоту. Но и это не спасало от слета ремня. И снова на помощь пришла проволока:

Для управления двигателями была использована Arduino Uno, а точнее ее китайская копия. Как оказалось, вполне бы хватило и Arduino mini. Питания от arduino для двигателей не хватало, и поэтому был заказан MOTOR SHIELD L293D. Как блок питания был использован блок питания от старого модема, из всего найденного под рукой он выдавал наибольший вольтаж — 9V (двигатели рассчитаны на 5-12V). Для простоты подключения из модема был выломан вход, к нему припаяны 2 проводка и все это было подключено к shield. Shield насаживался на arduino.

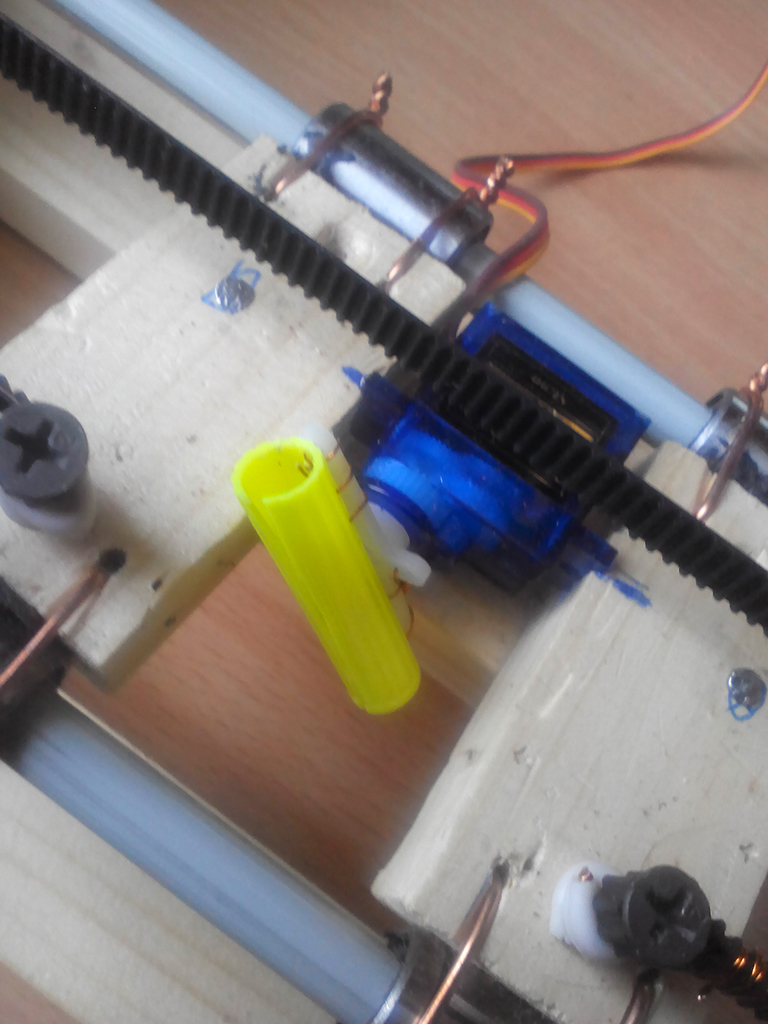
Изначально для управления фломастером планировалось использовать систему из 2 колес, как в прокатных станках, но, для быстроты исполнения, крепление было сделано сразу на сервоприводе. Получается, что точки ставятся не кончиком фломастера, а боком. К первоначальной идее планируется вернуться в следующей версии принтера. Сервопривод также подключается к shield.
Наполнение кодом
Для arduino был написан код, который принимает от ПК по Serial Port команду в виде строки из 9 символов. Первый символ это код команды, далее идут по 4 символа на координаты X и Y. Ссылка на код на стороне ПК будет в конце статьи.
#include <AFMotor.h>
#include <Servo.h>
AF_Stepper motor(2048, 1);
AF_Stepper motor2(2048, 2);
Servo servo1;
int x0 = 0;
int y0 = 0;
int K = 1;
void setup() {
motor.setSpeed(15);
motor2.setSpeed(15);
servo1.attach(10);
servo1.write(65);
Serial.begin(9600);
}
void OneTouch(){
servo1.write(60);
delay(50);
servo1.write(65);
}
void MoveRight(int h){
motor.step(h, FORWARD, SINGLE);
motor2.step(h, FORWARD, SINGLE);
}
void MoveDown(int h){
motor.step(h, BACKWARD, SINGLE);
motor2.step(h, FORWARD, SINGLE);
}
void MoveUp(int h){
motor.step(h, FORWARD, SINGLE);
motor2.step(h, BACKWARD, SINGLE);
}
void MoveLeft(int h){
motor.step(h, BACKWARD, SINGLE);
motor2.step(h, BACKWARD, SINGLE);
}
void OnePointer(int x, int y){
int stepX = x - x0;
int stepY = y - y0;
if (stepX > 0)
MoveRight(stepX);
else
MoveLeft(-stepX);
if (stepY > 0)
MoveDown(stepY);
else
MoveUp(-stepY);
x0 = x;
y0 = y;
OneTouch();
}
void Move(int x, int y){
int stepX = x - x0;
int stepY = y - y0;
int kX, kY;
while ((stepX != 0) || (stepY != 0)){
kX=K;
kY=K;
if (kX> abs(stepX))
kX = abs(stepX);
if (kY> abs(stepY))
kY = abs(stepY);
if (stepX > 0){
MoveRight(kX);
stepX-=kX;
}
if (stepX < 0){
MoveLeft(kX);
stepX+=kX;
}
if (stepY > 0){
MoveDown(kY);
stepY-=kY;
}
if (stepY < 0){
MoveUp(kY);
stepY+=kY;
}
}
x0 = x;
y0 = y;
OneTouch();
}
void loop() {
while (Serial.available() == 0);
String buffer ="";
int i = 0;
delay(100);
while(i < 9) {
buffer += Serial.read();
i++;
}
String code = buffer.substring(0,1);
code.trim();
int cod = code.toInt();
String first = buffer.substring(0,5);
first.trim();
int x = first.toInt() - cod*10;
String second = buffer.substring(0,9);
second.trim();
int y = second.toInt() - x*10000 - cod * 100000;
switch (cod){
case 0:
Move(x,y);
OneTouch();
break;
case 1:
servo1.write(65);
delay(50);
Move(x,y);
break;
case 2:
servo1.write(60);
delay(50);
Move(x,y);
servo1.write(65);
break;
case 3:
servo1.write(65);
delay(50);
break;
case 4:
servo1.write(60);
delay(50);
break;
case 5:
Move(x,y);
break;
case 6:
Move(0,0);
motor.release();
motor2.release();
break;
case 7:
K=x;
break;
}
Serial.print(1);
}
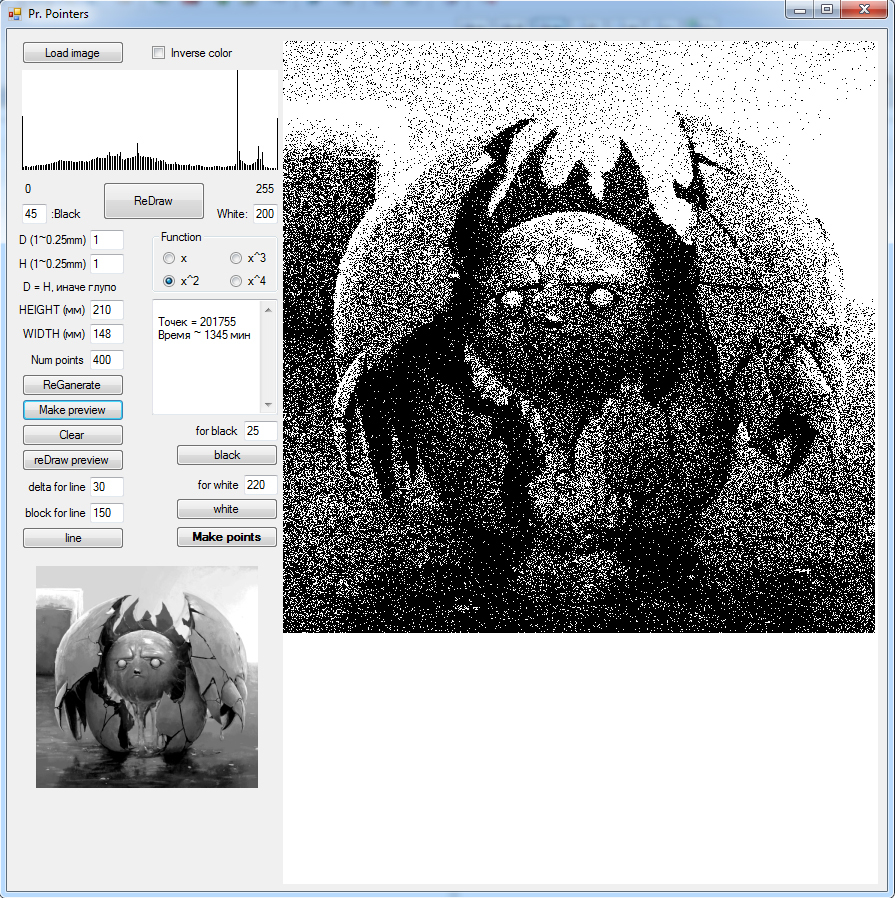
Приложение на стороне ПК позволяет загрузить изображение, перевести в черно-белые тона и сгенерировать набор точек.
- сгенерировать рандомные значения X и Y
- взять цвет пикселя из изображения по этим координатам
- проверить в массиве значение по индексу равному цвету пикселя
- если значение больше 0, то:
- значение в массиве уменьшить на 1
- занести координаты в очередь
- нарисовать точку
Вот так выглядит окно приложения:
Как оказалось, если на двигателях не оставлять питание после каждого движения, то они прокручиваются назад, а если оставлять – то они греются. А еще больше греется shield, поэтому был откопан старый куллер и закреплен над микросхемами. Питание он берет от того же блока питания напрямую, чтобы не занимать разъёмы на shield. После двухчасового теста ничего не сгорело. Так же была добавлена коробка, для защиты конструкции.

Так как стола для него не было сделано, чтобы лист не шатался при печати, был взят лист формата А3. Платформа становится на лист и прижимает его. А чтобы и вся конструкция не скользила, на нее ставится гантель или банка варенья. Печатает она довольно медленно, в среднем на точку уходит 0,7 секунды. И вот что получается на выходе:

Заключение
Принтер получился медленным, непрезентабельным, требующим доработок, но печатающим в нужном стиле. Начало положено и сделаны многие выводы, как по конструкции, так и по коду, и если все же хватит терпения на вторую версию данного агрегата — все будет учтено и сделано более качественно.
Из потраченных на него средств (приблизительно):
- 3$ на спицы
- 17$ двигатели 2шт. (хотя можно было взять и менее точные)
- 3$ arduino Uno (но хватит и Nano)
- 5,5$ Линейные подшипники 8*15*24мм, 10 шт. (понадобилось 8шт.)
- 2,5$ MOTOR SHIELD L293D (можно купить отдельно 2 микросхемы L293D, а сервопривод питать от arduino)
- 2$ Обычные подшипники 8*22*7мм, 6шт.
- 8$ Крепления для направляющих 8мм, 8шт.
- 4$ Ремень 20-GT2-6 (2м) + 2 ролика
- 2$ Сервопривод Sg90 9G
- ~10$ на каркас, болты, гвозди, проволоку (тут можно сэкономить, если многое уже есть дома)
Бесплатно: вентилятор, блок питания.
Итого около 57$, хотя можно сделать и еще дешевле.
Код для ПК.
Короткое видео работы принтера:
Комментарии (18)

Loki3000
29.12.2015 12:07+3Постепенно его можно будет допилить сначала до плоттера, а потом и до фрезерного станка:)
proudmore
29.12.2015 12:35В комментариях паблика в ВК под постом задали вопрос: «откуда он взял новые шестерни на двигатели. У меня лежит 4 шт nema17 там такая же херня». Решил помочь узнать, да и самому любопытно)

KuSu
29.12.2015 12:41Шли в комплекте с ремнем. На али видел в продаже шестерни отдельно от ремня, но отдельно покупать не рискнул.
proudmore
29.12.2015 13:12«все двигатели с латунными шестернями, что я видел, имеют зауженный вал: в месте крепления шестерни вал сужается с 5мм до 4. Те что обычно в комплекте с ремнями обычно идут на стандартный вал 5мм»
KuSu
29.12.2015 13:18У меня вал 4,7 мм и шестерни хорошо держатся на своих креплениях. Правда один вал, для надежности, я обмотал 1-2 слоями скотча.
P.s. в вк я ответ продублировал

amarao
29.12.2015 12:56Диттеринг можно делать не только в режиме chaos, но и паттернами — так оно иногда получается более благородно. Помнится мне, я во времена матричных принтеров правильными фильтрами и настройками добивался почти «как на лазернике» качества за счёт отсутствия грязных штук.

GreyCat
29.12.2015 18:21Dithering тут действительно какой-то дико странный. Как минимум, он будет дико подвержен всяким забавным эффектам используемого генератора псевдослучайных чисел (типа таких). Если же всякие Флойд-Стейнберги и прочие диффузные алгоритмы, если так хочется…

rPman
30.12.2015 01:35Я прошу прощения, но здесь действительно нужно использовать сервомотор? Ставит черточки а не точки, энергоемко, медленно, громко, дорого… нет ДОРОГО!
Сделать трубочку из бумаги (картонка), накручивая ее на стальной гвоздь, затем на эту трубочку намотать несколько слоев медной проволоки (лакированной например), при подаче напряжения на обмотку гвоздь будет втягиваться, если добавить пружинку или вторую обмотку то получим очень дешевый линейный двигатель… сложнее будет ручку закрепить чем его сделать, для подключения к ногам микропроцессора понадобится 1-2 дешевых детальки, я уверен.
И самое главное, таких магнитов можно сделать много, что позволит ускорить печать на порядок, а если придумать систему подачи чернил (например поступает через паралон/вату/древесные опилки..., через которую пропущены гвозди остриями вниз)… получается очень бюджетная печатающая головка.KuSu
30.12.2015 01:53Идея крутая, можно взять капиллярную ручку, обмотать чем то металлическим и использовать вместо гвоздя. будет удобно и не сложно.
По поводу быстрее. Если использовать один такой элемент, то не на много быстрее выйдет. Сервопривод ставит точку за 100мс, основное время тратится на работу шаговиков. Хотя можно сделать матрицу из таких ручек и ставить сразу несколько точек, но там вопрос расстояний между ними, т.к. нужна большая точность (возможная точность шаговиков — 1/8 мм).
По поводу дешевле. Цена сервопривода в 1.7$ теряется на фоне цены за другие элементы. Но если вопрос идет о максимальном удешевлении, то да, лучше заменить.rPman
30.12.2015 02:06Совсем забыл, пузырек с тушью, ручки… все фигня, вспомним матричные принтеры — обычная красящая лента (ткань + тушь + кажется немного масла).
Точность печати и расстояния между ручками это очень простой вопрос тюнинга софта, который можно сделать 'распечатав' одно специальное тестовое изображение и отсканировав его.
Сервопривод точно стоит пару баксов? Самый дешевый вроде видел по 400р (я не говорю про оптовые закупки в китае)… я понимаю, это небольшая сумма, но и проект вроде как DIY инсталяция, и цена — принципиальный вопрос.KuSu
30.12.2015 02:16Тогда ленту надо будет заранее заготавливать, а тут — любой фломастер и в бой.
Специально сейчас глянул. С бесплатной доставкой стоит 130 руб.
Понимаю. Там есть несколько узких мест, где можно при должной подготовке, достаточном терпении и запасе времени сделать еще дешевле.
turbopower
30.12.2015 03:56любопытно
у меня масштабнее проблема
мне нужна печать по листовому металлу с разрешением 2400dpi
толщина металла до 7мм
я уже мысленно даже лазер встраивал, вырезающий изображение испепеляя слой краски с поверхности металла
пока остановился на идее CTP, просто изменить подающий механизм под другую толщину металла и адаптировать дешевый фоторезист какой-нибудь
поскольку инженеров-энтузиастов в радиусе нет — проект второй год висит, я вечно занят
коммерчески востребовано решение, кстати, на западе

roboter
По идее питание можно подключить к ардуино и не городить разъём сверху, у ардуино есть пин VIn, там тоже самое напряжение что и на входе.
KuSu
Спасибо за информацию, я почитаю потом про это подробнее. Если можно не городить лишний разъем, то конструкция от этого только выиграет.