
Здравствуйте. В своих статьях я хочу Вас познакомить с основами программирования микрокомпьютера LEGO NXT Mindstorms 2.0. Для разработки приложений я буду использовать платформы Microsoft Robotics Developer Studio 4 (MRDS 4) и National Instruments LabVIEW (NI LabVIEW). Будут рассматриваться и реализовываться задачи автоматического и автоматизированного управления мобильными роботами. Двигаться мы будем от простого к сложному.

Почему именно NXT Mindstorms 2.0? Потому-что для своих проектов данный набор мне показался наиболее подходящим, т.к. микрокомпьютер NXT полностью совместим с платформами MRDS 4 и NI LabVIEW, а так же данный набор является очень гибким в плане сборки различных конфигураций роботов — затрачивается минимум времени на сборку робота.
Почему платформы MRDS 4 и NI LabVIEW? Так сложилось исторически. Обучаясь на старших курсах университета стояла задача в разработке учебных курсов с использованием данных платформ. К тому же платформы обладают достаточной простотой в освоении и функциональностью, с их использованием можно написать программу непосредственно для управления роботом, разработать интерфейс пользователя и провести тестирование в виртуальной среде (в случае с MRDS 4).
Да кому вообще нужны эти ваши уроки, в сети и так куча проектов по робототехнике! С использованием данной связки (NXT+MRDS 4/NI LabVIEW) учебных статей практически нет, в основном используется родная среда программирования, а в ней совсем все тривиально. Всем кому интересны робототехника, программирование и у кого есть набор NXT (а таких не мало), возрастная аудитория любая.
Графические языки программирования это зло, а те кто на них программируют еретики! Графические языки программирования коими и являются MRDS 4 и NI LabVIEW несомненно имеют свои минусы, например ориентированность под узкие задачи, но все же в функциональности они мало уступают текстовым языкам, тем более NI LabVIEW изначально разрабатывался как язык легкий в освоении для решения научных и инженерных задач, для этого в нем присутствует множество необходимых библиотек и инструментов. По-этому для решения наших задач данные графические языки являются наиболее подходящими. И не надо нас за этосжигать на костре презирать.
Все это выглядит по-детски и вообще не серьезно! Когда задача состоит в реализации алгоритмов, в обучении основам и принципам программирования, робототехники, систем реального времени без углубления в схемотехнику и протоколы, то это очень подходящий инструмент хоть и не дешевый (касаемо набора NXT). Хотя для этих же целей неплохо подойдут наборы на базе Arduino, но совместимости с MRDS 4 и NI LabVIEW у данного контроллера почти нет, а в данных платформах есть свои прелести.
Технологии, которые используются, являются продуктом загнивающих капиталистических стран, а автор враг народа и пособник западных заговорщиков! К сожалению, большинство технологий в области электроники и вычислительной техники родом с запада, буду очень рад если мне укажут на аналогичные технологии исконно отечественного производства. А пока будем использовать то, что имеем. И не надо на меня за этосообщать спецслужбам держать зла.
Внесу некоторую ясность в терминологию. Под платформой, в данном случае, имеется ввиду совокупность различных инструментов, например язык VPL в MRDS, а так же среда выполнения приложений, т.е. непосредственной компиляции приложений в исполняемые (*.exe) файлы нету.
В 2006 году Microsoft объявила о создании платформы Microsoft Robotics Developer Studio (более подробно в статье Википедии). MRDS – это Windows – ориентированная среда разработки приложений для робототехники и симуляции. В настоящее время актуальной является версия Microsoft Robotics Developer Studio 4. Среди особенностей: язык графического программирования VPL, Web – и Windows – ориентированные интерфейсы, среда симуляции VSE, упрощенный доступ к датчикам, микроконтроллеру и исполнительным механизмам робота, поддержка языка программирования C#, библиотеки для многопоточного программирования и распределенного выполнения приложений CCR и DSS, поддержка многих робототехнических платформ (Eddie, Boe — Bot, CoroBot, iRobot, LEGO NXT и т.д.).
LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench) — это среда разработки и платформа для выполнения программ, созданных на графическом языке программирования «G» фирмы National Instruments (более подробно в статье Википедии). LabVIEW используется в системах сбора и обработки данных, а также для управления техническими объектами и технологическими процессами. Идеологически LabVIEW очень близка к SCADA-системам, но в отличие от них в большей степени ориентирована на решение задач не столько в области АСУ ТП (автоматизированные системы управления технологическим процессом), сколько в области АСНИ (автоматизированных систем научных исследований). Графический язык программирования «G», используемый в LabVIEW, основан на архитектуре потоков данных. Последовательность выполнения операторов в таких языках определяется не порядком их следования (как в императивных языках программирования), а наличием данных на входах этих операторов. Операторы, не связанные по данным, выполняются параллельно в произвольном порядке. Программа LabVIEW называется и является виртуальным прибором (англ. Virtual Instrument) и состоит из двух частей:
Комплект NXT состоит из управляющего блока, четырех датчиков и трех сервоприводов. Управляющий блок содержит в себе:
Датчики (в разных комплектациях разные наборы датчиков ):

Рисунок 1 — Микрокомпьютер NXT с подключенными датчиками и приводами
И конечно же в наборе находятся разнообразные детали LEGO в форм-факторе LEGO Technic из которых будут собраны исполнительные механизмы и несущая конструкция.

Рисунок 2 — Детали в форм-факторе LEGO Technic
Напишем первое приложение. Пусть, классически, данное приложение выводит текст “Hello, World!”. Реализация будет происходить поочередно в MRDS 4 и NI LabVIEW, в процессе будем рассматривать специфику каждой платформы.
Предварительно инсталлируем платформы MRDS 4 и NI LabVIEW, в случае с MRDS 4 инсталляция должна проводится в папку путь к которой не состоит из кириллицы (русских букв), учетная запись пользователя так-же должна состоять только из латинских букв.
Запускаем среду VPL (Меню Пуск — Все Программы — Microsoft Robotics Developer Studio 4 — Visual Programming Language). Данная среда позволяет разрабатывать приложения на языке VPL, проводить тестирование в виртуальной среде VSE. Программа в VPL представляет собой диаграмму, состоящую из соединенных между собой блоков. В открывшемся окне, помимо стандартной панели команд и меню, присутствует 5 основных окон:

Рисунок 3 — Среда программирования VPL
Выполним следующую последовательность действий:
На данной платформе все реализуется, практически, идентично. Запустим среду LabVIEW. Перед нами появиться два окна, первое — Front Panel, предназначено для реализации интерфейса пользователя (внешнего вида виртуального прибора), второе — Block Diagram, для реализации логики программы.

Рисунок 8 — Окна среды LabVIEW
Мы будем использовать окно Block Diagram. Выполним следующие шаги:
В следующих статьях мы будем заниматься непосредственно программированием NXT. По среде LabVIEW в сети есть много учебных материалов, по VPL гораздо меньше. Очень рекомендую изучить справочное руководство обеих платформ (необходимо знание английского), в данных руководствах очень много примеров которые можно реализовать и не имея NXT, а так же следующие книги:
В своих статьях я буду описывать только свои проекты, т.к. не вижу смысла переписывать информацию из одних источников в другие. Приму любую конструктивную критику, отвечу на любые вопросы касаемо рассмотренных платформ. Заранее спасибо!
Предвосхищая некоторые вопросы и комментарии читателей.
Почему именно NXT Mindstorms 2.0? Потому-что для своих проектов данный набор мне показался наиболее подходящим, т.к. микрокомпьютер NXT полностью совместим с платформами MRDS 4 и NI LabVIEW, а так же данный набор является очень гибким в плане сборки различных конфигураций роботов — затрачивается минимум времени на сборку робота.
Почему платформы MRDS 4 и NI LabVIEW? Так сложилось исторически. Обучаясь на старших курсах университета стояла задача в разработке учебных курсов с использованием данных платформ. К тому же платформы обладают достаточной простотой в освоении и функциональностью, с их использованием можно написать программу непосредственно для управления роботом, разработать интерфейс пользователя и провести тестирование в виртуальной среде (в случае с MRDS 4).
Да кому вообще нужны эти ваши уроки, в сети и так куча проектов по робототехнике! С использованием данной связки (NXT+MRDS 4/NI LabVIEW) учебных статей практически нет, в основном используется родная среда программирования, а в ней совсем все тривиально. Всем кому интересны робототехника, программирование и у кого есть набор NXT (а таких не мало), возрастная аудитория любая.
Графические языки программирования это зло, а те кто на них программируют еретики! Графические языки программирования коими и являются MRDS 4 и NI LabVIEW несомненно имеют свои минусы, например ориентированность под узкие задачи, но все же в функциональности они мало уступают текстовым языкам, тем более NI LabVIEW изначально разрабатывался как язык легкий в освоении для решения научных и инженерных задач, для этого в нем присутствует множество необходимых библиотек и инструментов. По-этому для решения наших задач данные графические языки являются наиболее подходящими. И не надо нас за это
Все это выглядит по-детски и вообще не серьезно! Когда задача состоит в реализации алгоритмов, в обучении основам и принципам программирования, робототехники, систем реального времени без углубления в схемотехнику и протоколы, то это очень подходящий инструмент хоть и не дешевый (касаемо набора NXT). Хотя для этих же целей неплохо подойдут наборы на базе Arduino, но совместимости с MRDS 4 и NI LabVIEW у данного контроллера почти нет, а в данных платформах есть свои прелести.
Технологии, которые используются, являются продуктом загнивающих капиталистических стран, а автор враг народа и пособник западных заговорщиков! К сожалению, большинство технологий в области электроники и вычислительной техники родом с запада, буду очень рад если мне укажут на аналогичные технологии исконно отечественного производства. А пока будем использовать то, что имеем. И не надо на меня за это
Краткий обзор платформ MRDS 4 и NI LabVIEW.
Внесу некоторую ясность в терминологию. Под платформой, в данном случае, имеется ввиду совокупность различных инструментов, например язык VPL в MRDS, а так же среда выполнения приложений, т.е. непосредственной компиляции приложений в исполняемые (*.exe) файлы нету.
В 2006 году Microsoft объявила о создании платформы Microsoft Robotics Developer Studio (более подробно в статье Википедии). MRDS – это Windows – ориентированная среда разработки приложений для робототехники и симуляции. В настоящее время актуальной является версия Microsoft Robotics Developer Studio 4. Среди особенностей: язык графического программирования VPL, Web – и Windows – ориентированные интерфейсы, среда симуляции VSE, упрощенный доступ к датчикам, микроконтроллеру и исполнительным механизмам робота, поддержка языка программирования C#, библиотеки для многопоточного программирования и распределенного выполнения приложений CCR и DSS, поддержка многих робототехнических платформ (Eddie, Boe — Bot, CoroBot, iRobot, LEGO NXT и т.д.).
LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench) — это среда разработки и платформа для выполнения программ, созданных на графическом языке программирования «G» фирмы National Instruments (более подробно в статье Википедии). LabVIEW используется в системах сбора и обработки данных, а также для управления техническими объектами и технологическими процессами. Идеологически LabVIEW очень близка к SCADA-системам, но в отличие от них в большей степени ориентирована на решение задач не столько в области АСУ ТП (автоматизированные системы управления технологическим процессом), сколько в области АСНИ (автоматизированных систем научных исследований). Графический язык программирования «G», используемый в LabVIEW, основан на архитектуре потоков данных. Последовательность выполнения операторов в таких языках определяется не порядком их следования (как в императивных языках программирования), а наличием данных на входах этих операторов. Операторы, не связанные по данным, выполняются параллельно в произвольном порядке. Программа LabVIEW называется и является виртуальным прибором (англ. Virtual Instrument) и состоит из двух частей:
- блочной диаграммы, описывающей логику работы виртуального прибора;
- лицевой панели, описывающей интерфейс пользователя виртуального прибора.
Краткий обзор набора LEGO NXT Mindstorms 2.0.
Комплект NXT состоит из управляющего блока, четырех датчиков и трех сервоприводов. Управляющий блок содержит в себе:
- 32-битный микроконтроллер AVR7 с 256 КБайт FLASH памяти и 64 КБайт RAM памяти;
- 8-битный микроконтроллер AVR c 4 Кбайт FLASH памяти и 512 Байт RAM памяти;
- радиомодуль Bluetooth V 2.0;
- USB-порт;
- 3 разъема для подключения сервоприводов;
- 4 разъема для подключения датчиков;
- LCD дисплей разрешением 99x63 пикселей;
- динамик;
- разъем для 6 батареек типа AA.
Датчики (в разных комплектациях разные наборы датчиков ):
- ультразвуковой датчик;
- два тактильных датчика (датчики касания);
- датчик опредения цвета.
Рисунок 1 — Микрокомпьютер NXT с подключенными датчиками и приводами
И конечно же в наборе находятся разнообразные детали LEGO в форм-факторе LEGO Technic из которых будут собраны исполнительные механизмы и несущая конструкция.
Рисунок 2 — Детали в форм-факторе LEGO Technic
Пишем первое приложение.
Напишем первое приложение. Пусть, классически, данное приложение выводит текст “Hello, World!”. Реализация будет происходить поочередно в MRDS 4 и NI LabVIEW, в процессе будем рассматривать специфику каждой платформы.
Предварительно инсталлируем платформы MRDS 4 и NI LabVIEW, в случае с MRDS 4 инсталляция должна проводится в папку путь к которой не состоит из кириллицы (русских букв), учетная запись пользователя так-же должна состоять только из латинских букв.
1. Платформа MRDS 4.
Запускаем среду VPL (Меню Пуск — Все Программы — Microsoft Robotics Developer Studio 4 — Visual Programming Language). Данная среда позволяет разрабатывать приложения на языке VPL, проводить тестирование в виртуальной среде VSE. Программа в VPL представляет собой диаграмму, состоящую из соединенных между собой блоков. В открывшемся окне, помимо стандартной панели команд и меню, присутствует 5 основных окон:
- Basic Activities – содержит базовые блоки, которые реализуют такие операторы как константа, переменная, условие и т.д.;
- Services – содержит блоки, предоставляющие доступ к функционалу платформы MRDS, например блоки для взаимодействия с какой-либо аппаратной составляющей робота, или блоки для вызова диалогового окна;
- Project – объединяет диаграммы входящие в проект, а так же различные конфигурационные файлы;
- Properties – содержит свойства выделенного блока;
- Diagrams window – содержит, непосредственно, диаграмму (исходный код) приложения.
Рисунок 3 — Среда программирования VPL
Выполним следующую последовательность действий:
- добавим блоки Data (из окна Basic Activities) и блок сервиса Simple Dialog (из окна Services),
- в блок Data введем “Hello, World!” (без кавычек) и выберем тип данных String,
- соединим блок Data с блоком Simple Dialog, появиться диалоговое окно,
- далее, все выполняем как на рисунках

Рисунок 4 — Окно Connections

Рисунок 5 — Окно Data Connections

Рисунок 6 — Законченный вид диаграммы
- Запустим программу на выполнение.

Рисунок 7 — Результат выполнения программы
2. Платформа NI LabVIEW.
На данной платформе все реализуется, практически, идентично. Запустим среду LabVIEW. Перед нами появиться два окна, первое — Front Panel, предназначено для реализации интерфейса пользователя (внешнего вида виртуального прибора), второе — Block Diagram, для реализации логики программы.
Рисунок 8 — Окна среды LabVIEW
Мы будем использовать окно Block Diagram. Выполним следующие шаги:
- в окне Block Diagram вызовем контекстное меню, нажатием правой кнопкой мыши,
- в появившемся окне перейдем по вкладкам, как на рисунке и выберем String Constant,
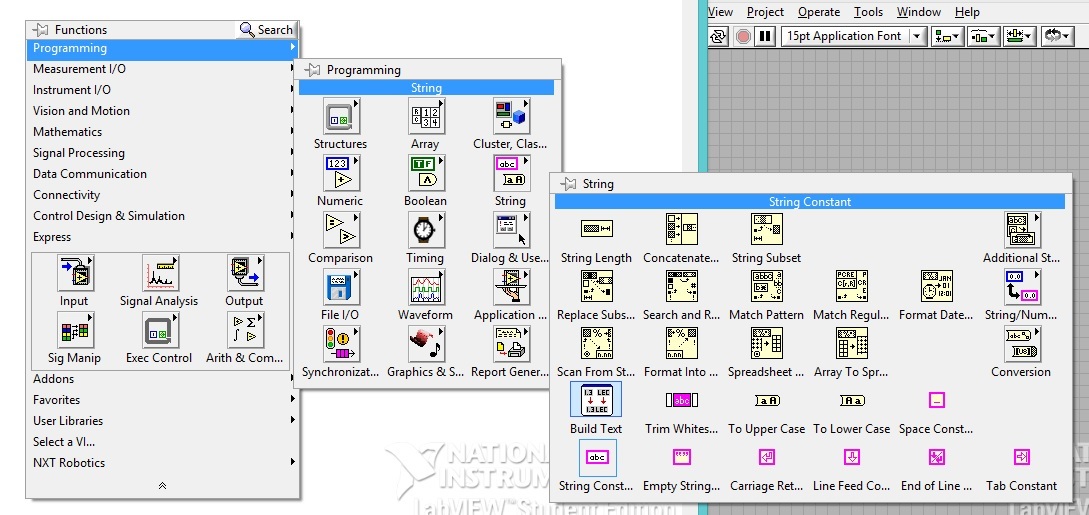
Рисунок 9 — Контекстное меню
- разместим данный блок и введем «Hello, World!»,
- аналогичным образом выберем блок One Button Dialog,
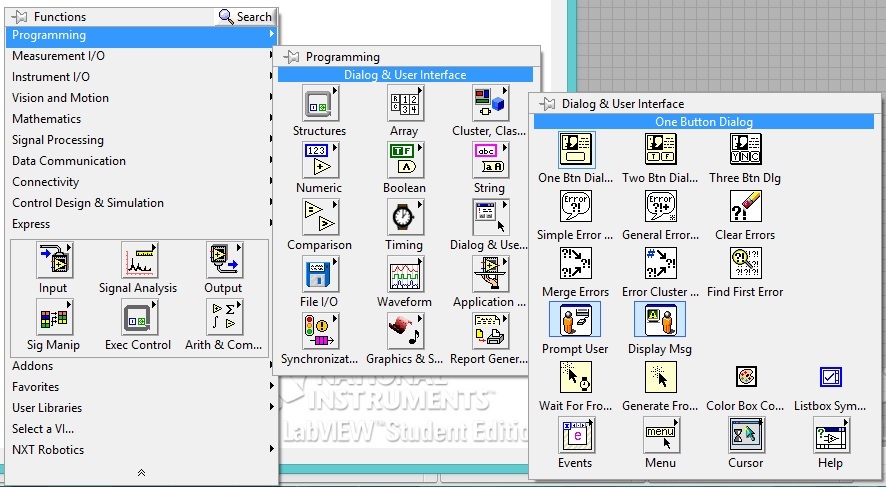
Рисунок 10 — Блок One Button Dialog
- соединим блоки как показано на рисунке,
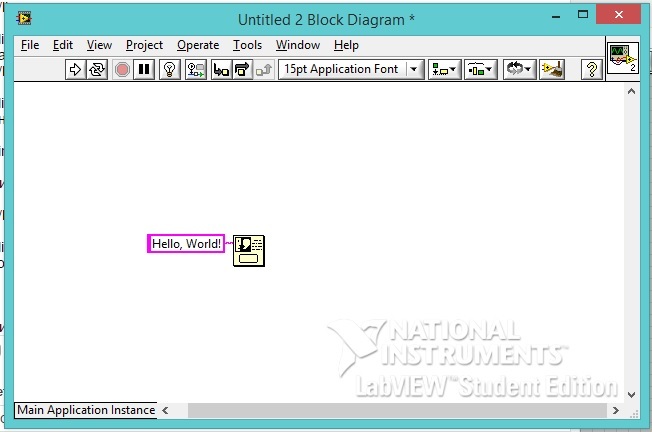
Рисунок 11 — Готовая диаграмма
- запустим программу, нажав кнопку в виде горизонтальной стрелки на панели задач,
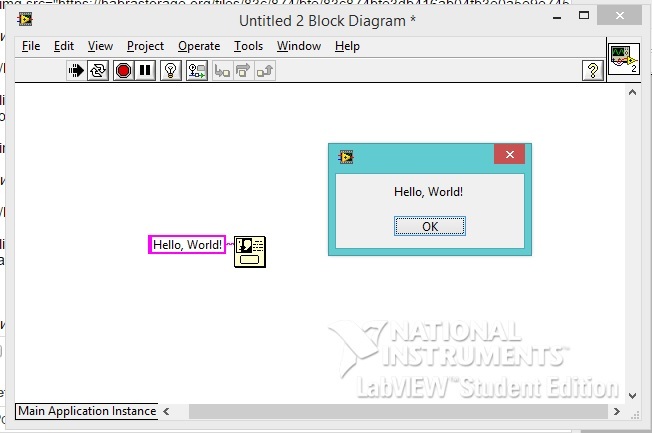
Рисунок 12 — Результат выполнения программы
Резюме
- Мы сделали обзор программных платформ для разработки приложений микрокомпьютера NXT.
- Мы рассмотрели основные принципы разработки приложений в платформах MRDS 4 и NI LabVIEW.
- Познакомились с интерфейсом сред.
В следующих статьях мы будем заниматься непосредственно программированием NXT. По среде LabVIEW в сети есть много учебных материалов, по VPL гораздо меньше. Очень рекомендую изучить справочное руководство обеих платформ (необходимо знание английского), в данных руководствах очень много примеров которые можно реализовать и не имея NXT, а так же следующие книги:
- Программируем микрокомпьютер NXT в LabVIEW — Лидия Белиовская, Александр Белиовский,
- Microsoft Robotics Developer Studio. Программирование алгоритмов управления роботами — Василий Гай.
В своих статьях я буду описывать только свои проекты, т.к. не вижу смысла переписывать информацию из одних источников в другие. Приму любую конструктивную критику, отвечу на любые вопросы касаемо рассмотренных платформ. Заранее спасибо!

amartology
А почему майндсторм понятно, но почему второй, а не третий? Какой был, или есть другие соображения?
alfatapok
Потому-что второй покупался когда третий был только в проекте.