
"Она настолько мощна и страшна, что стоит отдельно, как стратегическое оружие."

Преамбула
Инженерное образование в казёном Политехе имеет такой специфический бонус, как дает его питомцам возможность делать себе всяческие безделушки потехи ради. Это особенно актуально нынешними длинными зимними вечерами.
В этом тексте я расскажу, как сделать игрушечную модель нашей замечательной УАЗ Буханки с дистанционным управлением по инфракрасному лучу.
Мне эта машина нисколько не чужда, так как и сам раз ездил на настоящей Буханке в качестве пассажира.
В прочем, обо всем по-порядку...
Постановка задачи:
Разработать дистанционно управляемую машинку. В модель должна быть заложена возможность регулировать крутящий момент на задней оси и на рулевой рейке. Машинка должна ездить вперед, двигаться назад, поворачивать вправо -->, поворачивать влево <--.
Не использовать клей и изоленту. Изделие должно быть ремонтопригодным.
Что-ж. Задачи определены.... За работу!
Аппаратная часть
Я не собираюсь проектировать электронную плату и трассировать PCB. Хочу всё собрать из готовых доступных в продаже деталей и электронных модулей. Заточить внутрь крутую твердотельную электронику и написать для неё top-notch прошивку.
Что надо из оборудования?
Компонент |
Пояснение |
DevEBox-STM32F4XX_M_V3.0 |
Управляющая электроника |
программатор ST-Link/V2 |
Чтобы запрограммировать STM32F407VG |
Переходник с USB-UART |
для отладки через UART-CLI |
Штангенциркуль |
чтобы снять размеры с деталей и получить исходные данные для разработки чертежа скрепы |
KLS5-18650-2W-L150 (TBH-18650-2B-W) (FC1-5217), |
Батарейный отсек 2х18650 |
Оболочка машинки в виде Буханки |
Корпус, чтобы скрыть ужасы самопальной электроники |
A4 лист оргстекла |
для крепления электроники |
Две Li-ion MH12210 батареи 18650. Модель NCR18650B. 3.7 V каждая |
для электропитания модели |
Зарядное устройство для батарей LiitoKala Lii-PD2 |
Для зарядки Li-ion батарей в корпусе 18650 |
Пульт Samsung BN59-01198R |
Для испускания команд на RC ровер. |
ИК приемник TSOP22xx |
Для приема команд от пульта BN59-01198R |
Драйвер силовой электроники на DRV8870 |
Для непосредственного управления токами в обмотках мотора |
Крепёж. Пластиковые стойки, гайки, болты |
Для крепления электронных плат |
Схемотехника
Управлять всеми агрегатами Буханки мы будем с помощью вот этой малютки.

Это учебно-треннировочная электронная плата DevEBox-STM32F4XX_M_V3.0. Буквально нашел это у себя на балконе. Что ей валяться без дела? Еще послужит. К слову, вот её блок- схема .

Чтобы запрограммировать плату DevEBox_STM32F4XX_M_V3_0 надо соединить PCB и программатор ST-Link/V2 ISOL по интерфейсу SWD. Мне очень повезло, что у меня программатор с гальванической изоляцией. Это позволило мне делать пошаговую отладку прошивки прямо при питании от батареи.

Для вращения DC моторов нужны микросхемы драйверы H-мостов. По теорию и практику вращения DC моторов у меня есть отдельный текст. Я выбрал чип DRV8870. На DRV8870 надо подавать напряжение от 6.5V. В качестве энергетической установки выбрал два Li-ion аккумулятора и пластиковый батарейный отсек для них.

В качестве ИК приемника подойдет компонент семейства TSOP22. Это очень удобный модуль, так как есть два отверстия для крепления на болтах. Плюс присутствует LED на проводе DATA, подтягивающий резистор и конденсатор на питании. Про теорию и практику декодирования ИК сигнала у меня есть отдельный текст.

Кристаллизировалась такая архитектура электронной начинки

Программная часть
Команды передаются по IR протоколу Samsung. Каждая команда на движение имеет время жизни 500ms. Если она не приходит машинка автоматически останавливается. Есть команды для конфигурации. TV пультом можно выбрать заполнение PWM сигнала и тем самым косвенно управлять скоростью движения. Можно отдельно регулировать как крутящий момент на рулевой рейке так и на тяговом двигателе.
Для обратной связи, что всё работает я добавил писк при включении, и щелчок Buzzer-ом при приеме любой валидной команды.
Кнопка |
Действие |
PLAY_FORWARD |
Увеличить частоту PWM тягового мотора на 100 Hz |
PLAY_BACK |
Уменьшить частоту PWM тягового мотора на 100 Hz |
ENTER |
Аварийный останов всех двигателей |
SPORTS |
Переключиться в режим постоянной тяги. В этом режиме надо только рулить. Машинка сама едет прямо. |
STOP |
Выйти из режима постоянной тяги. |
0 |
PWM на тяговом моторе 0% |
1 |
PWM на тяговом моторе 10% |
2 |
PWM на тяговом моторе 20% |
.... |
|
9 |
PWM на тяговом моторе 90% |
PROG_NEXT |
Увеличить на 1% заполнение PWM на моторе рулевой рейки |
PROG_PREV |
Уменьшить на 1% заполнение PWM на моторе рулевой рейки |
LEFT |
Повернуть налево |
RIGHT |
Повернуть направо |
MUTE |
Издать гудок клаксона |
VOL_PLUS |
Увеличить на 1% заполнение PWM на тяговом моторе |
VOL_MINUS |
Уменьшить на 1% заполнение PWM на тяговом моторе |
INFO |
Повернуть направо и двинуться вперед |
TOOLS |
Задний ход с поворотом налево |
EXIT |
Реверс с поворотом вправо |
RETURN |
Реверс с поворотом влево |
UP |
Движение вперед |
DOWN |
движение назад |
Power |
Перезагрузить MCU |
STOP |
Отключить PWM сигналы |
В прошивку заложены отладочные механизмы:
—Как только принимается корректная команда LED мигает 100ms.
—Каждая успешно отработанная команда провоцирует щелчок пьезокерамическим звуко-излучателем.
Прошивка обогащена набором программных компонентов, которые связаны между собой согласно этому графу.

Бинарь прошивки можно скачать тут.
Механика
В качестве шасси я решил просто купить на Ozone RC УАЗ Буханку. Выкинуть родную электронику и поставить туда другие электронные мозги в пластиковую оболочку. Благо места внутри валом, что открывает перспективы глубокой модернизации. Из игрушки мы сразу получаем готовую силовую установку (powertrain), рулевую реку, 2 BDC мотора и корпус c защитой IP12.

Чтобы всё это выглядело хоть немного прилично я вмонтировал отладочные модули на пластине из оргстекла и соединил их перемычками. Открыл программу MoI 3D и начертил скрепу для отладочной платы и модулей: IR, DRV8870, Buzzer, батарея. По сути получился старый-добрый поверхностный навесной монтаж. При выборе компоновки PCB-шек надо стремиться сделать центр масс между осями колёс. Поэтому самую тяжелую деталь - батарею я поместил в самый центр Буханки.

Затем я открыл profi.ru и нашел мастера по лазерной резке. Договорился и отправил *.dxf файл скрепы за завод. Само оргстекло продается на Ozone. На следующий день мастер вырезал деталь 100W-ным лазерным лучом на CO2 CNC станке. Причем до этого я пробовал резку на 40W полупроводниковом лазере, однако мощности 40W оказалось не достаточно для 3мм оргстекла и первая заготовка ушла в утиль. Про техпроцесс изготовления подложек у меня есть отдельный текст.

Вот так это выглядит в натуре. На снимке показан процесс отладки калибровки прошивки через главную консоль управления поверх UART. Вся электронная начинка упрятана под пластиковым саркофагом.

Так как пластик плохо пропускает инфракрасный диапазон, то IR приемник TSOP22xx пришлось вынести наружу и монтировать на крышу ровера.

Получился такой комплект. Теперь можно и погонять...

В целом всё получилось. Модель легко управляется, имеет отличную тяговооружённость и завораживающий звук трансмиссии от катушек ротора. Можно практиковаться в езде по площадке: змейка, карман, гараж, горка и т. п. Ещё RC машинка это отличный повод выйти на улицу и погонять на свежем воздухе в парке или на стадионе.

Затем я решил провести полевые испытания. Вышел на улицу с стал гонять на последней передаче. Едва успевал за ней бегать. Прохожим было безразлично. Однако машинка особенно привлекла внимание собак. Они подходили и нюхали Буханку. На одном заряде эта Буханка проехала 3.5 км. Как только почувствуете, что батарея подходит к концу, вы просто повышаете заполнение PWM и машинка опять едет на прежней скорости. После поездки обнаружил, что какая-то трава намоталась на левое заднее колесо.

Я очень рад, что добавил в прошивку регулирование момента силы на рулевой рейке. Так как на высокой скорости момент нужен как раз минимальный, на малой скорости - максимальный. Момент силы задается заполнением PWM сигнала.
В чем трудность?
Казалось бы слепить RC -машинку простая задача, но, как водится, были свои овраги.
1--Надо подавить питание на MCU со всех сторон. У MCU не случайно несколько пинов VCC. Если подать VCC на один пин, то получается так что, одни каналы PWM работают хорошо, а остальные не дотягивают до уровней и DC моторы просто не двигаются.
2--Бракованные детали. Из 4х купленных микросхем DRV8870 заработало только три. Пришлось заново разбирать механику, чтобы заменить плату драйвера DC-мотора. Потом для подложки я по ошибке сначала купил монолитный поликарбонат. При резке лазерным лучом поликарбонат сильно задымил и источал зловонию. Пришлось перейти на оргстекло.
3--Надо заботиться о центре масс. Надо думать над компоновкой и стремиться сделать центр масс строго между осями шасси. Иначе машинка будет просто букcовать на месте, не вписываться в повороты или вовсе опрокидываться. В случае неудачного общего центра масс надо грамотно расставить утяжелители. В добавок к этому надо еще выровнять центр масс вдоль продольной оси. Без этого машинка плохо поворачивает задним ходом.
4--Как всегда, USB-micro разъём отслаивается от платы. Для программирования приходилось придерживать USB-micro кабель рукой во время процесса загрузки firmware. Без этого SWD link пропадает по питанию и перепрошивка обрывается.
5--Подложку не удалось изготовить с первой попытки. Как оказалось полупроводникового 40W лазера оказалось слишком мало, чтобы прошибить оргстекло 3мм. Пришлось прибегнуть к более мощному лазеру: CO2 100W .
6--При активном токе в обмотках IR-приемник пропускает команды. Надо остановиться или уменьшить заполнение PWM, чтобы просто принять следующую команду. Я отключил все таймерные прерывания. Проблема осталась. При этом заметил вот что. Стоит лишь нацепить на пин IR-DATA щуп осциллографа, как прием происходит даже на ходу. Видимо надо как-то подобрать конденсатор между пином IR data и GND.
Что можно улучшить?
Всё что я тут собрал это, конечно же, паллиативное решение. По-хорошему можно много, что улучшить:
1--Прежде всего это конструктив и механику. SWD разъём и UART-CLI вывести под капот. Нужны шлейфы вместо перемычек. Потом по хорошему надо одну PCB для управления, а не 4 PCB, как сейчас.
2--Добавить поддержку большего количества IR протоколов. Имеет смысл расставить 4 IR приемника по периметру кузова.
3--Можно добавить PWM управление яркостью передних фар.
4--Вместо PWM попробовать Delta-Sigma модуляцию (PDM). Плавность хода окажется эффективнее. PDM лучше PWM, так как при том же заполнении амплитуда пульсаций тока в обмотках окажется меньше.

5--Записывать в накопитель лог событий. Сделать своего рада черный ящик. Можно запоминать циклограмму поступивших с пульта команд, а затем отрабатывать её автоматически.
6--Можно подключить ESP-01 и управлять игрушкой с LapTop PC. Прямо с клавиатуры + выгребать любую телеметрию в режиме CLI. Или добавить LoRa модуль. Если передавать команды через UWB трансивер, то можно будет управлять сквозь бетонные стеы.
7--Можно сделать машинку, с головкой самонаведения (ГСН), которая по пятну на полу от лазерной указки будет ездить за модулированным световым пятном. Это называется инфракрасный ГСН. Так работают корректируемые артиллерийские снаряды. При этом не нужна камера. Достаточно двух фоторезисторов разделенных перегородкой и ЦОС.
8--Добавить в прошивку модели поддержку протоколов UDS и XCP. Прямо поверх UART.
9--Добавить MEMS акселерометр, чтобы отключать мотор при опрокидывании кузова. Издавать динамиком сирену при шевелении машинки в состоянии покоя. Типа сигнализация.
10--Добавить режим защиты от детей. Чтобы без активации не разрешать гонять на полной скорости. При значениях заполнения PWM более 60-70%.
Итог
В сухом остатке удалось смастерить продвинутую машинку с дистанционным управлении и гораздо большими потребительскими возможностями, нежели то, что было в оригинальной модели. Теперь можно регулировать крутящий момент на рулевой рейке и заднем мосту. Также добавлен пьезокерамический клаксон. Управлять машинкой можно с обыкновенного телевизионного ИК пульта c Samsung протоколом.
На основе этого материала Вы и сами можете собрать точно такое же изделие. Артефакты для STM32 я выложил на github. Если есть желание, то могу сварить отдельную прошивку с косметическими изменениями специально для Вас.
Потом, вендоры MCU могут выпускать отладочные платы с МК и двумя драйверами DC-моторов для привлечения внимания к своим МК. Эта же электроника может двигать шторы, поднимать столешницу, размагничивать наручные часы, заряжать Li-ion батареи, шевелить зеркала или управлять торшером. Отладочная плата с MCU и двумя H-мостами может быть отличным учебным инвентарём для изучения электроники и программирования в ВУЗах.
Если у Вас есть идеи по улучшению этого прожекта, то пишите их в комментариях.
"Разработка электроники может привести к некоторым полезным результатам, но это не единственная причина почему мы ей занимаемся."
Словарь
Акроним |
Расшифровка |
VCC |
Voltage at the Collector |
UART |
Universal asynchronous receiver/transmitter |
PCB |
printed circuit board |
UDS |
Unified Diagnostic Services |
PWM |
Pulse-width modulation |
PDM |
Pulse-density modulation |
XCP |
Universal Measurement and Calibration Protocol |
CO2 |
Carbon dioxide |
RC |
Remote Control |
SWD |
Serial Wire Debug |
CNC |
Computer numerical control |
УАЗ |
Ульяновский Aвтомобильный Завод |
Ссылки
Вопросы
--Существую ли LoRa, GFSK или UWB совместимые пульты для дальнобойной радиосвязи в RC моделировании? Желательно с открытым и хорошо документированным интерфейсом и протоколом.
Комментарии (51)

alexzen
18.10.2025 01:18Почему выбрали именно инфракрасное управление? По радиосвязи дальность больше и не нужна прямая видимость.

aabzel Автор
18.10.2025 01:18ИК реализовать проще всего так как кругом полно готовых пультов.

randomsimplenumber
18.10.2025 01:18Телевизорный пульт для управления автомобилем - максимально неподходящий из готовых.
aabzel Автор
18.10.2025 01:18Зато на нем 49 кнопок
randomsimplenumber
18.10.2025 01:18А нужен контроллер с рулем и педалями. Да, для телевизора он будет максимально неудобный ;)

tormozedison
18.10.2025 01:18Разработчик может позже решить расширить функционал. Типа: миниатюрный руль в кабине крутится, рычаг КПП ходит, стрелки на приборной панели шевелятся (при помощи SSD1306), сирена включается, если пошевелить, когда неподвижно стоит, лебёдка трос наматывает, и так далее. Или добавить режим работы по заранее набранной программе, как на Электронике ИМ-11. Как раз возможности пульта с большим количеством кнопок будут раскрыты.
aabzel Автор
18.10.2025 01:18Типа: миниатюрный руль в кабине крутится, рычаг КПП ходит, стрелки на приборной панели шевелятся
Очень смешно. Это же модель. Вы предлагаете какие-то нанотехнологи.
tormozedison
18.10.2025 01:18Некоторые моделисты к максимальной детализации стремятся. В том числе с применением миниатюрных механизмов довольно тонкой работы.
aabzel Автор
18.10.2025 01:18Некоторые моделисты к максимальной детализации стремятся.
Да. Одного даже показали в 3й серии КиберДеревни


tormozedison
18.10.2025 01:18Неизвестно, как разработчик дальше распорядится моделью. От курсовой работы до штучного изделия на «Ярмарке мастеров». В обоих случаях чем больше функций, и кнопок, соответственно, тем лучше.
aabzel Автор
18.10.2025 01:18А нужен контроллер с рулем и педалями.
Как же тогда катать модель на улице?
randomsimplenumber
18.10.2025 01:18Ну, например контроллер в виде руля. Рулевая рейка все равно управляется углом поворота. Телеуправление придумали не вчера, есть куча готовых решений.
Да, парковка задом с помощью пульта от телевизора будет напоминать состязание Ахилла и чепепахи.

MEGA_Nexus
18.10.2025 01:18Возрождение отечественного автопрома. Начало. /sarcasm
aabzel Автор
18.10.2025 01:18Как по мне надо просто брать старые советские автомобили (волги, москвичи, оки) и делать их на новом техпроцессе: карбоновый корпус, электрическая тяга, CAN-FD.
randomsimplenumber
18.10.2025 01:18Нельзя. В тех машинах нет места под аккумулятор.
aabzel Автор
18.10.2025 01:18Ну хотя бы на бензине. Лишь бы из карбона и с нормальной электроникой.
+ автономное вождениеrandomsimplenumber
18.10.2025 01:18Лишь бы из карбона
Отвратительный материал. Не варится, не рихтуется. В случае чего - под замену.
с нормальной электроникой
А что там не так? нормальная электроника ;)
автономное вождение
От старого советского автомобиля останется чуть менее чем ничего ;)
aabzel Автор
18.10.2025 01:18что там не так? нормальная электроника
ECU для форсунок вместо карбюратора, автоматическая коробка передач, АБС, ESP. Стеклоопускатели, подушка безопасности, телематика.
Can-fd, Automotive Ethernet, a2b.
randomsimplenumber
18.10.2025 01:18Так зачем все эти навороты в ретроавтрмобиле? Ни одной детали, кроме колес, решетки радиатора и лобового стекла, использовать не удастся. Другая силовая установка, другой кузов, другая трансмиссия.


sim2q
18.10.2025 01:18в опросе не хватает:
[x] - мне нравятся мнемосхемы автора!aabzel Автор
18.10.2025 01:18Это не мои схемы.
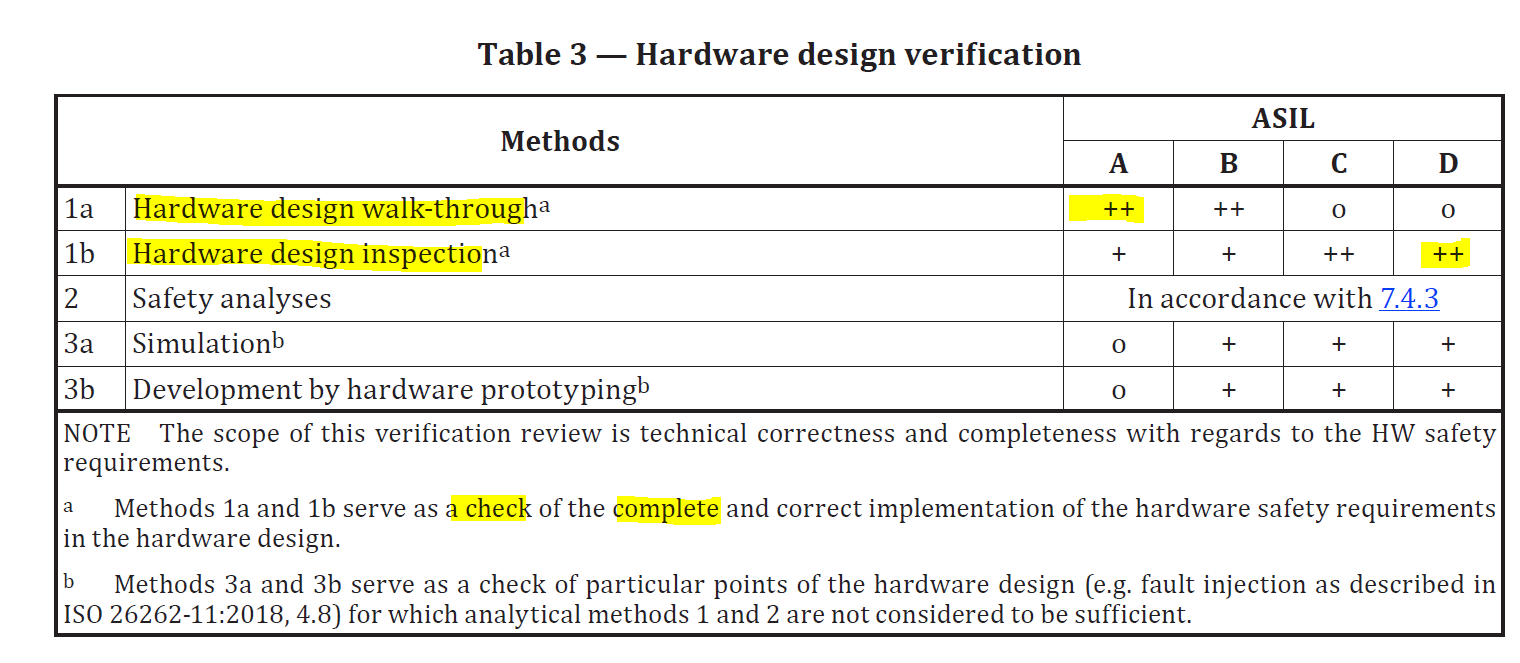
Инспекция аппаратного дизайна это требование международного автомобильного стандарта функциональной безопасности продукта ISO26262-5
это обсуждается тут
Правила Хорошей Структурной Схемы для Электронных Платhttps://habr.com/ru/articles/667030/Все кто в своей жизни программировали хоть что-то сложнее очередного пресловутого СКУД-а знают что такое ISO-26262


corvair
18.10.2025 01:18Ей бы для пущего реализма полный привод, причём подключаемый, и такой, чтобы в моноприводном режиме не прокручивать вхолостую его механизмы, что означает отсутствие индивидуального электропривода и применение раздаточной коробки с муфтой отключения привода переднего моста.
Сам хочу построить действующую модель тросового экскаватора типа ЭО-5111Б, проблема в том, что для реализма требуется возможность свободного вращения двух лебёдочных барабанов, чтобы например, можно было забросить с размаху ковш драглайна или пользоваться шар-бабой как в "Ну, погоди!". Проблема в реализации этой функции, в идеале должно быть управляемое вращение барабанов в обе стороны и свободная размотка.
aabzel Автор
18.10.2025 01:18Сам хочу построить действующую модель тросового экскаватора типа ЭО-5111Б
Это для Копальни?

aprezi
18.10.2025 01:18ты зашёл за этим комментом
randomsimplenumber
18.10.2025 01:18Ну, по сути да. Родное радиоуправление с родного пульта - выкинули; stm32 - всунули.




m0tral
18.10.2025 01:18Ну и где видео тестовых испытаний?
aabzel Автор
18.10.2025 01:18YouTube же забанили. Не выложить.
randomsimplenumber
18.10.2025 01:18А вы айтишник же?
aabzel Автор
18.10.2025 01:18Программисты микроконтроллеров не IT-шники.
Я когда работал в aВтоВАЗ-е нам даже IT аккредитация была не положена.

JoshMil
18.10.2025 01:18Повседневно езжу на этой машине). Ну и ремонтирую тоже конечно же. Вижу что автору даже удалось немного подправить заводскую багофичу с развесовкой и перед стал полегче).

Alexzero
18.10.2025 01:18Мне очень повезло, что у меня программатор с гальванической изоляцией. Это позволило мне делать пошаговую отладку прошивки прямо при питании от батареи.
Отладку при питании от АКБ можно сделать и гальванически связанным программатором, если подключить к чипу только GND, SWDIO, SWCLK, может быть помех будет чуть больше, решается короткими проводками от программатора к чипу и удлиннителем USB с ферритами.
Что Вы имеете ввиду под PDM управлением, за счёт чего может улучшится плавность хода?
aabzel Автор
18.10.2025 01:18Что Вы имеете ввиду под PDM управлением
PDM это не что иное как Delta-sigma модуляция.
https://en.wikipedia.org/wiki/Delta-sigma_modulation
Плавность достигается за счет равномерного размазывания битов заполнения по всему периоду.
aabzel Автор
18.10.2025 01:18
PDM лучше PWM так как при том же заполнении амплитуда пульсаций тока в обмотках меньше.
randomsimplenumber
18.10.2025 01:18Фактически увеличена частота PWM. Для двигателей постоянного тока - пофиг. Оно может иметь смысл, если нельзя повышать частоту. Например, если нужно синхронизироваться с 50 гц.
Bizonozubr
Про опрос. Катался на буханке без усилителя руля - непередаваемые ощущения на всю жизнь. Представляю, какие надо иметь накачанные руки, чтобы этим на постоянке управлять.
MinimumLaw
Это ладно. Я сел в буханку после другого отечественного автопрома - там усилителя руля тоже не было. Мои самые яркие впечатления - это педаль газа, на которую надо реально нажимать и сумасшедшая раскачка машины на ровном асфальте. По полю ехать реально проще, чем по асфальту. Я до сих пор с непониманием смотрю на тех, кто едет на ней хотя бы 80. Это же какое единение с машиной!
Но в целом у меня нет к ней ни малейших претензий. Для своих целей отличная машина. В частности тот УАЗ фермер, на котором я катался - очень кстати в хозяйстве пришелся. И аналогов ему наверное нет до сих пор.
zlat_zlat
Там быстро привыкаешь меньше крутить его на месте, я в свои 14 с ним справлялся на груженом «головастике», по деревне навоз возили. Хотя комплекция моя не особо)
AndronNSK
На уазе относительно нормальный руль. Просто крутить на месте не следует.
Прикольней, когда вакуумника на тормозах нету.
BSOZ
Рулевое управление в духе 30-х годов прошлого века, когда про угол Аккермана ещё только начали задумываться. У буханки оба поворотных колеса поворотной оси всегда в горизонтальной плоскости имеют один угол относительно продольной оси. Её не рассчитывали на длительную эксплуатацию по дорогам с твёрдым покрытием, поэтому при повороте колёс физика просто борется с рулевым управлением. Но с завода они комплектовались всегда резиной сомнительного качества, что компенсировало плохо просчитанную геометрию, поэтому руль в движении вполне себе поворачивается. И это же позволяло использовать одинаковые мосты для изделий с разной колёсной базой: рулевое управление ведёт себя одинаково плохо везде. А уменьшение ресурса рулевых наконечников из-за высокой нагрузки компенсировался возможностью обслуживания рулевых наконечников (они были разборными и имели вентиль для нагнетания смазки, при износе можно было заменить вкладыш и обновить смазку).
Но в пользу конструктора могу сказать, что многие производители внедорожников тоже годов до 80-х практиковали такие решения.
aabzel Автор
Надо быть Халком чтобы управлять Буханкой.
bodyawm
Видели какой я большой? Я на жиге на месте руль крутил и стал таким!!!
aabzel Автор
Это проявляется не только в российском автопроме. В авиации были самолеты тоже без гидроусилителя. Например Ил-4 (Голубь Мира).
Летчики Ил-4 после приземления вываливались из кабины без сил и теряли сознание.