
Данная публикация расчитана на тех, кто, наблюдая за прогрессом SpaceX в области возвращения разгонных ступеней, решил не отставать, двигаться в том же направлении, но пока не успел вложиться в 2 тонны посадочных лап.
Возможность повторного использования разгонных ступеней космических аппаратов позволяет существенно снизить стоимость их запусков. При этом желательно минимизировать издержки и связанные с этим изменения в их конструкции, поскольку основной функцией ступени по прежнему остается вывод полезной нагрузки в космос. Предлагаемое решение явилось результатом поиска в указанном направлении.
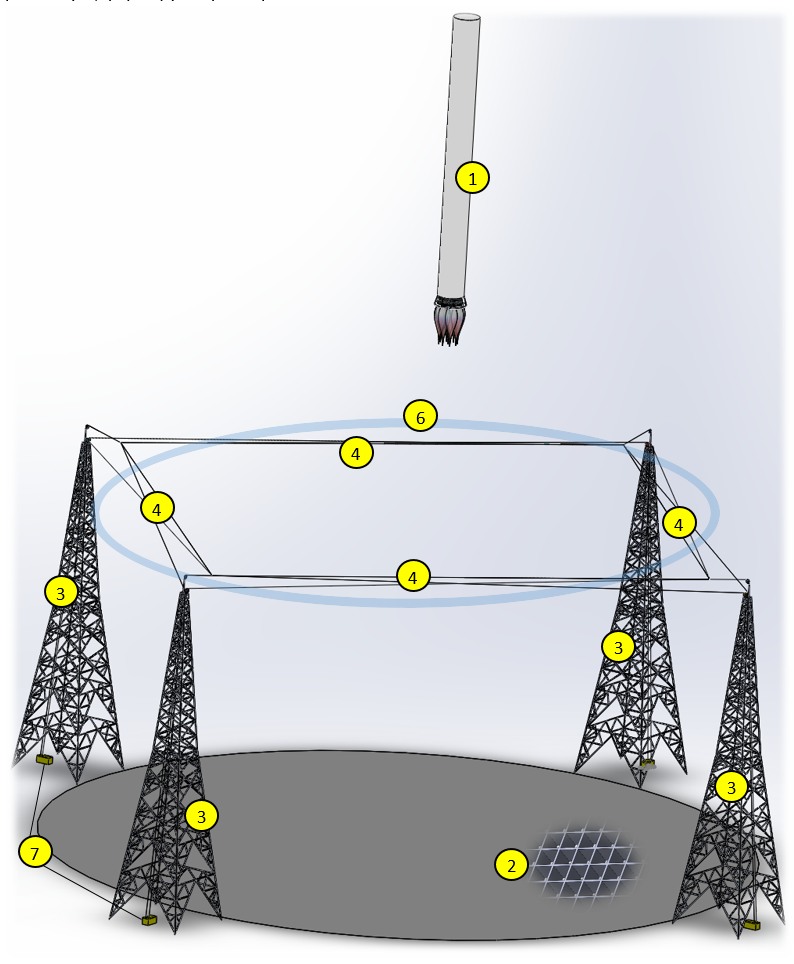
Комплекс представляет собой посадочную площадку (2), базирующуюся на земле либо на барже, с размерами, достаточными для гарантированного приёма, с учетом погрешности точности приземления возвращаемых ступеней. Посадочная площадка рассчитана выдержать вес возвращаемой ступени (1) и в основании имеет ячеистую структуру (2), пропускающую через себя реактивные газы. Непосредственно под посадочной площадкой находится система отвода и гашения реактивных газов при торможении ступени, в простейшем случае это может быть бассейн с водой. По периметру стоят четыре высотные опоры (3). На необходимой высоте и на одном уровне из каждой опоры выходят удерживающие стропы (4), образующие четыре петли, которые формируют один уровень петли захвата (6). При использовании многоуровневой (5) петли захвата, появляется возможность полного удержания ступени (1) в образуемой многоуровневой сети. В таком случае необходимость в посадочной площадке (2) отпадает совсем.
В целом конструкция выглядит и функционирует следующим образом:
В начальный момент на площадке, готовой к приёму ступени, петля захвата (6) максимально распахнута, формируя периметр области захвата.
С момента, когда станет достаточно точно известной точка приземления ступени, наступает второй этап: позиционирование и формирование петли захвата (6) вокруг спускающейся ступени (1).

Автоматизированная система, отслеживая положение петли (6) вокруг ступени (1), с помощью лебёдок (7) оперативно сужает петлю захвата (6), не касаясь поверхности ступени до полной её посадки. Но, при необходимости, петля (6) может быть активно задействована и во время посадки для стабилизации положения ступени, ограничивая возможность отклонений.
В момент устойчивого касания ступенью (1) посадочной площадки происходит затягивание петли (6). Таким образом обеспечивается надежная фиксация ступени (1) в вертикальном положении. Расположение петли на самом верху позволяет лёгкими усилиями надежно удерживать ступени в вертикальном положении.

Выше был рассмотрен вариант посадки на платформу. В этом случае петля способна только поддерживать ступень (1) в вертикальном положении, но, с увеличением у петли числа уровней, появляется возможность полного захвата и удержания возвращаемой ступени на весу в образуемой петлёю сети.

Пример трехуровневой петли захвата в морском варианте базирования, на барже (8). Полное удержание ступени (1) в петле позволяет отказаться от конструирования посадочной площадки.

Основные преимущества данного решения.
Возможность повторного использования разгонных ступеней космических аппаратов позволяет существенно снизить стоимость их запусков. При этом желательно минимизировать издержки и связанные с этим изменения в их конструкции, поскольку основной функцией ступени по прежнему остается вывод полезной нагрузки в космос. Предлагаемое решение явилось результатом поиска в указанном направлении.
Комплекс представляет собой посадочную площадку (2), базирующуюся на земле либо на барже, с размерами, достаточными для гарантированного приёма, с учетом погрешности точности приземления возвращаемых ступеней. Посадочная площадка рассчитана выдержать вес возвращаемой ступени (1) и в основании имеет ячеистую структуру (2), пропускающую через себя реактивные газы. Непосредственно под посадочной площадкой находится система отвода и гашения реактивных газов при торможении ступени, в простейшем случае это может быть бассейн с водой. По периметру стоят четыре высотные опоры (3). На необходимой высоте и на одном уровне из каждой опоры выходят удерживающие стропы (4), образующие четыре петли, которые формируют один уровень петли захвата (6). При использовании многоуровневой (5) петли захвата, появляется возможность полного удержания ступени (1) в образуемой многоуровневой сети. В таком случае необходимость в посадочной площадке (2) отпадает совсем.
В целом конструкция выглядит и функционирует следующим образом:
В начальный момент на площадке, готовой к приёму ступени, петля захвата (6) максимально распахнута, формируя периметр области захвата.
С момента, когда станет достаточно точно известной точка приземления ступени, наступает второй этап: позиционирование и формирование петли захвата (6) вокруг спускающейся ступени (1).
Автоматизированная система, отслеживая положение петли (6) вокруг ступени (1), с помощью лебёдок (7) оперативно сужает петлю захвата (6), не касаясь поверхности ступени до полной её посадки. Но, при необходимости, петля (6) может быть активно задействована и во время посадки для стабилизации положения ступени, ограничивая возможность отклонений.
В момент устойчивого касания ступенью (1) посадочной площадки происходит затягивание петли (6). Таким образом обеспечивается надежная фиксация ступени (1) в вертикальном положении. Расположение петли на самом верху позволяет лёгкими усилиями надежно удерживать ступени в вертикальном положении.
Выше был рассмотрен вариант посадки на платформу. В этом случае петля способна только поддерживать ступень (1) в вертикальном положении, но, с увеличением у петли числа уровней, появляется возможность полного захвата и удержания возвращаемой ступени на весу в образуемой петлёю сети.
Пример трехуровневой петли захвата в морском варианте базирования, на барже (8). Полное удержание ступени (1) в петле позволяет отказаться от конструирования посадочной площадки.
Основные преимущества данного решения.
- Все сложности и конструктивные изменения, связанные с решением проблемы посадки возвращаемой ступени, переносятся с возвращаемой ступени на посадочную площадку. Как следствие, это минимизирует изменения в конструкции ступени сохраняя её прежний вес и надежность.
- Канатная система позволяет надежно зафиксировать ступень в любой точке посадочной площадки достаточно большой площади.
- Петлевая форма контакта позволяет избежать точечных нагрузок и распределить усилие удержания ступени по окружности, вдоль места контакта петли с корпусом по высоте ступени, при использовании многоуровневой схемы.
- Отсутствие нагрузки в системе канатов в момент позиционирования петли вокруг корпуса ступени позволяет: быстро и точно производить позиционирование, что особенно важно в непредсказуемо меняющихся погодных условиях — сильном порывистом ветре, качке баржи, при морском базировании; использовать высокоскоростные лебёдки достаточно простой конструкции.
При эксплуатации в морском базировании, на барже позволяет отказаться от необходимости дополнительных средств фиксации. Совместная, а также слаженная работа системы позиционирования на борту возвращаемой ступени и системы управления петлёй захвата посадочной площадки позволит многократно увеличить надёжность удержания ступени даже самых сложных условиях.
Современный уровень развития реактивной техники не позволяет изменять динамично и в широком диапазоне величину тяги реактивного двигателя. В этом нет необходимости при взлёте, но для обеспечения «мягкой» посадки, это способность становится критически важным фактором.
При посадке, особенно в её самой последней фазе, основным способом стабилизации вертикального положения ступени является изменение вектора тяги тормозных двигателей. Поэтому до полной посадки желательно иметь достаточно сильную тягу. Если посадочная площадка представляет из себя сплошную ровную поверхность, то на малых (единицы метров) высотах из-за “Экранного эффекта” (“Ground effect”) вертикальная составляющая тяги (эффективность реактивных газов при торможении) существенно возрастает, по мере снижения ступени к поверхности посадочной площадки. При этом эффективность поперечной коррекции путем изменения вектора тяги возрастает не столь значительно, зато сильно меняются её характеристики.
Для компенсации последствий “Экранного эффекта” приходится сильно снижать тягу, одновременно это значительно ухудшает возможность поперечной стабилизации.
Снижение тяги возможно в достаточно узком диапазоне и до определенного, минимального уровня, ниже которого двигатель отключается, и, соответственно, его тяга с минимального уровня резко падает до нуля.
Для расширения диапазона изменения величины тяги приходится использовать конструкцию, состоящую из несколько двигателей. При достижении двигателями режима минимально допустимой тяги это позволяет добиться её дальнейшего снижения для ступени в целом, путём их поочерёдного отключения.
Минимизация “Экранного эффекта” позволит повысить управляемость ступени в самые последние, критически важные моменты посадки.
Предлагаемое решение это — либо использовать посадочную площадку, основание которой имеет ячеистую структуру, либо совсем отказаться от посадочной площадки путём захвата и удержания ракеты в предлагаемой многоуровневой сети. Очевидно, что посадочная площадка, в свою очередь, должна быть расположена на достаточной высоте, во избежание негативного воздействия земли под ней. Для уменьшения этой высоты под площадкой можно расположить бассейн с водой, которая соприкасаясь с реактивными газами будет эффективно охлаждать их, уменьшая их объем, и таким образом ещё сильнее подавляя проявление “Ground effect”.
В статье я опустил некоторые детали реализации. Unirail.org — первоисточник, тем, кто хочет их знать.
Насколько разрушительны нагрузки на корпус ракеты во время захвата и удержания:.
На примере Falcon 9 (штатное положение ракеты после возвращения)

Такие значительные нагрузки на корпус, как в таком, горизонтальном, положнии, в предлагаемой системе захвата недостижимы, а это, прошу заметить, штатное положение после возвращения.
cheblin
Возможно, тогда не понятно о каких не сработавших "замках" говорил Маск, комментируя неудачную посадку на баржу, когда лапа подломилась?
Да, должно. Насколько тепловая нагрузка высока, могут сказать только специалисты.
Да, иначе бессмысленно.
Расчитана. Я дополнил свой пост.
Нет таких планов. На редите обсуждали
Red_Lion
Логично предположить что нога раскрывается гидравликой/пневматикой из бака внутри ступени. Если после раскрытия не закрыть клапан от бака, то вполне может случиться такой факап.
Это по-вашему много сложной гидравлики? Кстати с момента того комментария мне рассказали что это фактически пневматика — проще наполнять и это сжимаемая среда, которая сработает как пружина сама по себе.
Опять — нет расчетов и численных обоснований.
В посте очень неправильная отсылка — в транспортном положении ступень пустая и большая часть массы лежит на опорах. Так что нагрузки там почти нет.
Вообще то есть и технологию посадки надо отработать. Текущая ситуация с возвратом ступени частный случай тестирования.