
Сервопривод отечественного производства Илюша.

Мы разрабатываем робот для сбора мячей для гольфа. Для открытия люка сброса мячей нам требуется сервопривод. Мы опробовали огромное количество и сегодня хотим рассказать Вам об очень интересном аналоге Dynamixel который более, чем в два раза дешевле.
Современный модельный сервопривод сегодня представляет законченное устройство в едином корпусе (мотор вместе с редуктором и платой управления). Самым распространенным способом управления модельными сервами является протокол PWM, положение серводвигателя определяется шириной импульса, наличие импульсов служит сигналом включения. Данный подход позволяет максимально упростить электронику, однако не лишен и проблем.
Во-первых, отсутствует обратная связь, а также есть проблемы подключения к PC подобным платформам (обычно требуется Arduino или другой микроконтроллер как прослойка). Во-вторых, из-за особенностей протокола точность позиционирования редко превышает 1\256 на диапазон работы сервопривода (270 или 180 градусов). В-третьих, нельзя детектировать поломку механики и перегрев. Все эти проблемы приводят к тому, что такие сервоприводы нельзя использовать в задачах, где требуется согласованно управлять большим количеством степеней с высокой точностью.
Для решения данных проблем нужно использовать общую шину данных. Популярным законченным решением является всем известные сервомоторы компании Dynamixel. Протокол совместим с обычным uart (требуется простая схема согласования). Может быть подключен к любому вычислителю, имеющему данный порт (Ардуино, Raspberry, пк). Данный подход позволяет синхронизировать движения сервоприводов, получать обратную связь, осуществлять контроль работоспособности (наличие ошибок, температуры), настраивать PID регулятор. Также упрощается проводка, теперь можно собирать сервоприводы последовательно. У производителя имеется большой модельный ряд на любой вкус и цвет. Однако цена остается сильно выше обычных сервоприводов с управлением по PWM.
И тут нам в руки попал сервопривод отечественного производства Илюша полностью совместимый с протоколом Dynamixel protocol v1. Нам стало интересно что это за зверь и что он может. Решили протестировать его и что из этого вышло расскажем ниже.
Основные параметры
Напряжение питания 6-15в
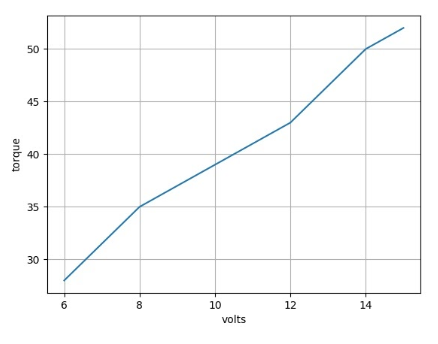
Максимальный момент 60кг*см
Разрешение энкодера 16384 попугая на 360 градусов
Защита от перегрева
Защита по току
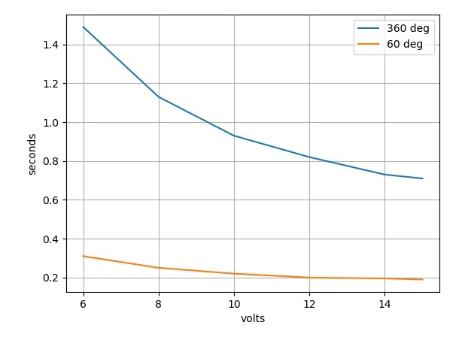
Для начала измерим измерим скорость вращения без нагрузки для ряда напряжений
6, 10, 12, 14, 15 В
А теперь измерим максимальный момент, при тех же значениях напряжения:
Время перехода для перемещения на 60 градусов.
А теперь самое неприятное — люфт в редукторе.
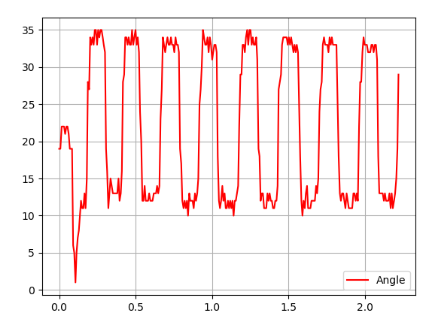
Из этого можем сделать вывод, что люфт ~0.5 градусов:

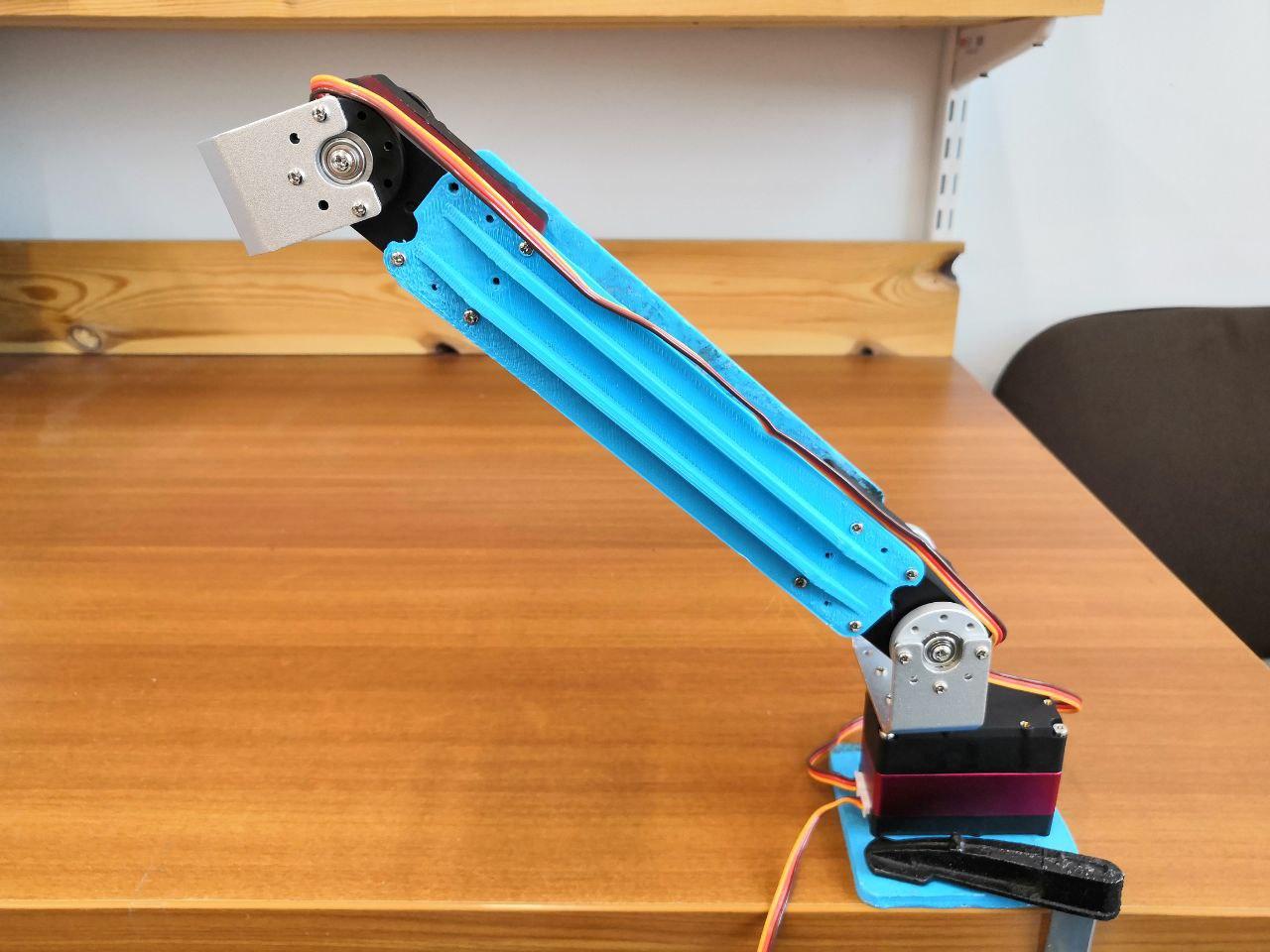
Характеристики подходят для наших целей, учитывая цену более чем в два раза ниже мы решили использовать именно эти сервоприводы в нашем устройстве.
Мы разрабатываем робот для сбора мячей для гольфа. Для открытия люка сброса мячей нам требуется сервопривод. Мы опробовали огромное количество и сегодня хотим рассказать Вам об очень интересном аналоге Dynamixel который более, чем в два раза дешевле.
Современный модельный сервопривод сегодня представляет законченное устройство в едином корпусе (мотор вместе с редуктором и платой управления). Самым распространенным способом управления модельными сервами является протокол PWM, положение серводвигателя определяется шириной импульса, наличие импульсов служит сигналом включения. Данный подход позволяет максимально упростить электронику, однако не лишен и проблем.
Во-первых, отсутствует обратная связь, а также есть проблемы подключения к PC подобным платформам (обычно требуется Arduino или другой микроконтроллер как прослойка). Во-вторых, из-за особенностей протокола точность позиционирования редко превышает 1\256 на диапазон работы сервопривода (270 или 180 градусов). В-третьих, нельзя детектировать поломку механики и перегрев. Все эти проблемы приводят к тому, что такие сервоприводы нельзя использовать в задачах, где требуется согласованно управлять большим количеством степеней с высокой точностью.
Для решения данных проблем нужно использовать общую шину данных. Популярным законченным решением является всем известные сервомоторы компании Dynamixel. Протокол совместим с обычным uart (требуется простая схема согласования). Может быть подключен к любому вычислителю, имеющему данный порт (Ардуино, Raspberry, пк). Данный подход позволяет синхронизировать движения сервоприводов, получать обратную связь, осуществлять контроль работоспособности (наличие ошибок, температуры), настраивать PID регулятор. Также упрощается проводка, теперь можно собирать сервоприводы последовательно. У производителя имеется большой модельный ряд на любой вкус и цвет. Однако цена остается сильно выше обычных сервоприводов с управлением по PWM.
И тут нам в руки попал сервопривод отечественного производства Илюша полностью совместимый с протоколом Dynamixel protocol v1. Нам стало интересно что это за зверь и что он может. Решили протестировать его и что из этого вышло расскажем ниже.
Основные параметры
Напряжение питания 6-15в
Максимальный момент 60кг*см
Разрешение энкодера 16384 попугая на 360 градусов
Защита от перегрева
Защита по току
Для начала измерим измерим скорость вращения без нагрузки для ряда напряжений
6, 10, 12, 14, 15 В
А теперь измерим максимальный момент, при тех же значениях напряжения:
Время перехода для перемещения на 60 градусов.
А теперь самое неприятное — люфт в редукторе.
Из этого можем сделать вывод, что люфт ~0.5 градусов:
Характеристики подходят для наших целей, учитывая цену более чем в два раза ниже мы решили использовать именно эти сервоприводы в нашем устройстве.








ktod
И сколько такое стоит?
Где и как купить 1шт на поиграться? Где и как купить 1000шт на проект?
webzuweb Автор
сайт
ktod
Ой, вы так дали ссылку, как будто там есть ответы на заданные вопросы.
dlinyj
там внизу есть цены.
Closer
Похоже раздел с ценами добавили только что. Вчера его точно не было.
ktod
Вот что Хабр животворящий делает!
Однако, отсутствие цен изначально настораживает.