
Микророботы не автономны: чтобы ими управлять, нужно внешнее воздействие. Один из вариантов — использовать магнитное поле, чтобы заставить небольшое существо передвигаться, прыгать и хватать «добычу».
Под катом собрали впечатляющие проекты магнитных микророботов. Насколько они функциональны и как могут помочь в медицине — рассказываем в подборке.
Микророботы из ферромагнитной стружки
В 2011 году ученые из Аргоннской национальной лаборатории создали магнитных микроботов размером до 0,5 мм. Они способны организованно перемещаться и собираться в разные структуры. Например, в круглую форму, которую ученые назвали «астерсом».

Четыре «астерса» захватывают частицы. Источник
Принцип работы
Вспомните школьный опыт с проявлением формы магнитного поля. Есть плоская катушка — провод, намотанный на окружность. Рядом с ней расположен гладкий столик, на который насыпана металлическая стружка.
При подаче электричества на катушку появляется магнитное поле. Металлические частицы приходят в движение и выстраиваются вдоль его силовых линий.
Видео эксперимента с магнитным полем кругового тока
Примерно по такому же принципу работают магнитные микророботы: ими можно манипулировать с помощью магнитного поля. Разница только в среде: чтобы частицы были подвижней, их поместили в прослойку между маслом и водой. Как думаете, почему именно такую среду выбрали ученые? Напишите в комментариях.
Внешнее магнитное поле
Сами микророботы состоят из ферромагнитных частиц. Это значит, что они могут сохранять намагниченность даже после отключения внешнего магнитного поля. Чтобы реконфигурировать структуру микророботов, нужно поменять направление магнитного поля — перемагнитить частицы.
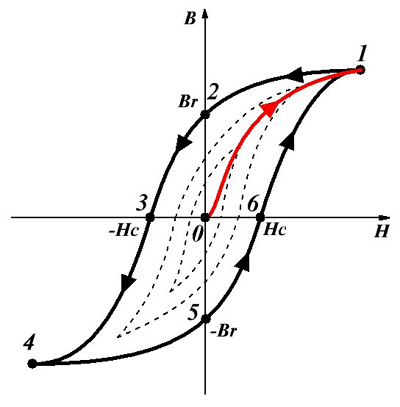
Способность ферромагнетиков к перемагничиванию можно изобразить с помощью петли гистерезиса. Сначала ферромагнетик намагничивается вдоль линий магнитного поля. При его отключении материал сохраняет остаточную намагниченность. Чтобы от неё избавиться, нужно изменить направление магнитного поля на противоположное.
Петля гистерезиса для ферромагнетика. Источник
Для управления микророботами разработчики используют два магнитных поля: чтобы скрутить ферромагнитные частицы в «астерс», нужно усилить вертикальное поле, а чтобы переместить — горизонтальное.
Изменение формы микророботов под действием магнитного поля. Источник
Область применения
Звучит заманчиво: теоретически, магнитных микророботов можно использовать для доставки лекарств в отдельные участки организма. Но есть и другие применения. «Астерсов» можно использовать для изоляции и вывода из организма отдельных микротел.
«Астерсы достаточно мощные, притом могут обрабатывать объекты более деликатно, чем механические микроманипуляторы», — Игорь Аронсон, физик Аргоннской лаборатории.
Для доставки лекарственных средств, кажется, подходит вариант покрупнее.
Роботы-домино
В 2018 году инженеры из университета Пердью и Западного Лафайета создали небольшого, но быстрого магнитного робота. Под действием магнитного поля он может двигаться со скоростью до 5 см/c. Притом его размер всего один квадратный миллиметр (400 мкм × 800 мкм) — робот вдвое больше, чем прошлая разработка.

Робот-домино перемещается. Источник
Мобильность
Кроме скорости и габаритов, робот обладает рядом возможностей.
- Может перемещаться в сухой и жидкой средах. Хотя в последней робот замедляется до 1,5 см/с.
- Умеет подниматься по наклонным поверхностям — до 60 градусов.
Принцип работы
Форма микроробота напоминает домино. В основе конструкции — легкая плитка из фоторезиста и два намагниченных «колпачка» с добавлением магнитных частиц.
Вращающееся внешнее магнитное поле заставляет робота перемещаться кувырками: «колпачки» намагничиваются и тянут за собой конструкцию до тех пор, пока поле не сбавит обороты.

Модель робота-домино. Источник
Для управления роботом не нужно строить большие установки из катушек индуктивности. Достаточно магнитного поля от 2 до 40 мТл — его можно создать с помощью небольшого соленоида. Единственное, что будет сложно сделать в домашних условиях, — маховик, который будет вращать магнит с частотой от 100 до 2000 Гц.
Область применения
Кажется, что разработка исследователей больше подходит для доставки лекарств, чем «астерсы». Но как прикрепить к конструкции микроробота таблетку — открытый вопрос.
Зато робот может не только подниматься под крутым наклоном, но и преодолевать неровные гофрированные поверхности с небольшими выступами и ямками — такого в органах достаточно. А вот для работы в сосудах есть более подходящий вариант.
Микророботы из водорослей
В 2017 году исследователи из университетов Гонконга, Эдинбурга и Манчестера изобрели магнитных роботов из водорослей спирулины. Ее обычно используют в кормовых добавках, она безвредна для человека.
Передвижение микророботов из водорослей в растворе. Источник
Принцип работы
Для управления роботами ученые используют трехосевую установку с катушками Гельмгольца — они генерируют магнитное поле в ограниченном пространстве. Мощность поля можно регулировать по каждой из осей пространства.
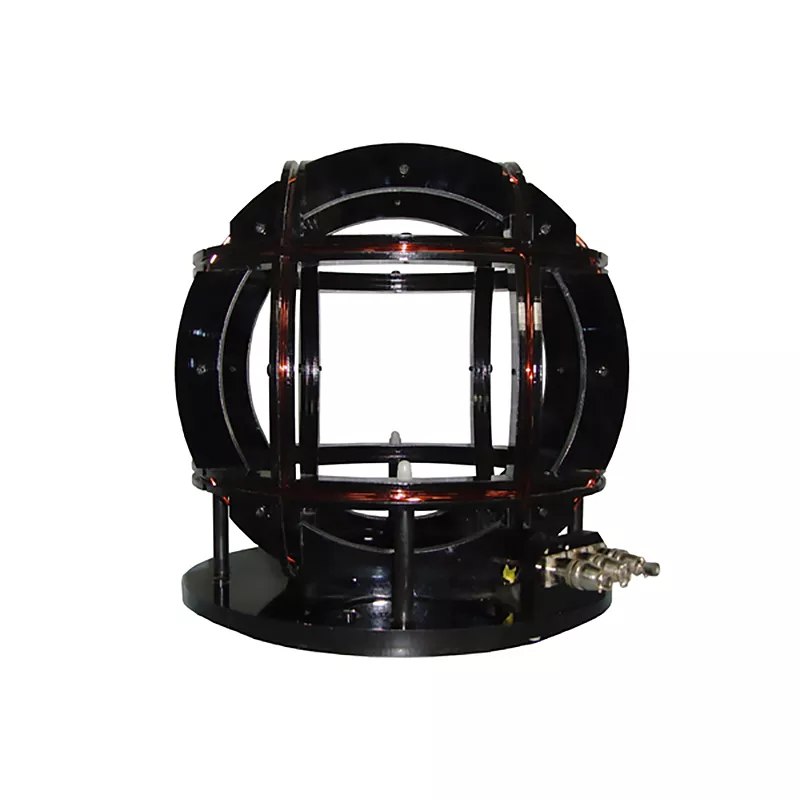
Трехосевая установка Гельмгольца
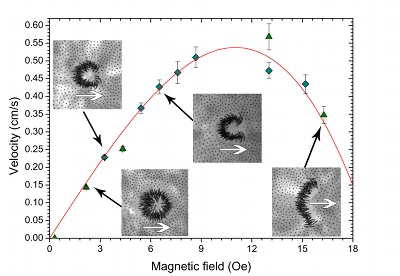
Трехмерное воздействие магнитного поля вызывает колебания роботов на разных участках. В результате они, подобно змеям, передвигаются в жидкой среде.

Схема движения подобного робота в переменном магнитном поле. Источник
Авторы протестировали робота в разных жидкостях — в крови, желудочном соке, урине и… арахисовом масле. Как думаете, в какой среде робот перемещается быстрее? Напишите в комментариях.
У вас мог возникнуть вопрос: «Как управлять роботами с помощью магнитного поля, если они из водорослей?»
Простите за лукавство. Разработчикам не удалось избавиться от металлов: для придания свойств магнетика ученые добавили наночастицы магнетита — оксида железа, Fe3O4.
Область применения
Исследователи проверили воздействие роботов на раковые клетки. Результаты показали, что робочастицы токсичны для рака шейки матки и печени. После введения препарата у раковых клеток запускается апоптоз — процесс «клеточного самоубийства».
Возможно, клетки рака погибают из-за фикоцианина — компонента водорослей спирулины.
Магнетит, который находится в составе робота, также способен помочь — его используют для «бомбардировок» опухолей. Частицы металла доставляют в область опухоли и с помощью переменного магнитного поля нагревают до 43-45 °C. Подробнее про использование магнетита в медицине можно почитать в статье НИТУ «МИСиС».
Возможно, эти тексты тоже вас заинтересуют:
→ Роботы-насекомые: удивительные и перспективные проекты
→ Модульные роботы: проекты, за которыми стоит следить
→ Все глубже и глубже: дата-центры отдают концы и уходят под воду
Роботы из гидрогеля
До сих пор мы говорили о неразлагаемых микророботах — после введения в организм их нужно удалять хирургическим путем.
Последняя разработка в подборке — полная противоположность. Мягкий магнитный робот больше предшественников и может раствориться за 48 часов при температуре человеческого тела.
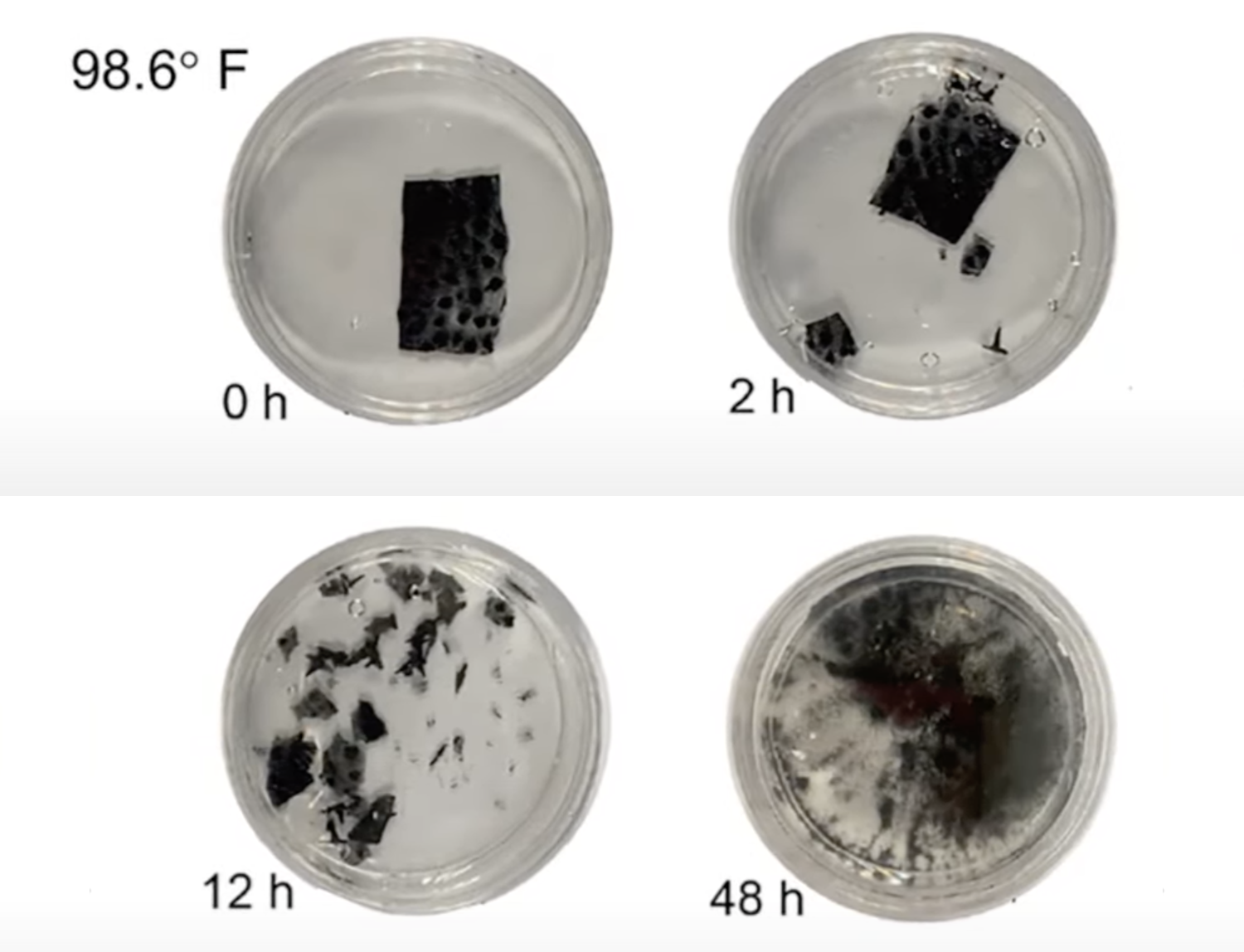
Робот растворяется в воде. Источник
Из чего состоит
Способность к растворению — особенность состава, из которого состоит робот. В его основе — ферромагнитный гидрогель Hof-Gel15-Fe3O4, состоящий из желатина и частиц оксида железа.
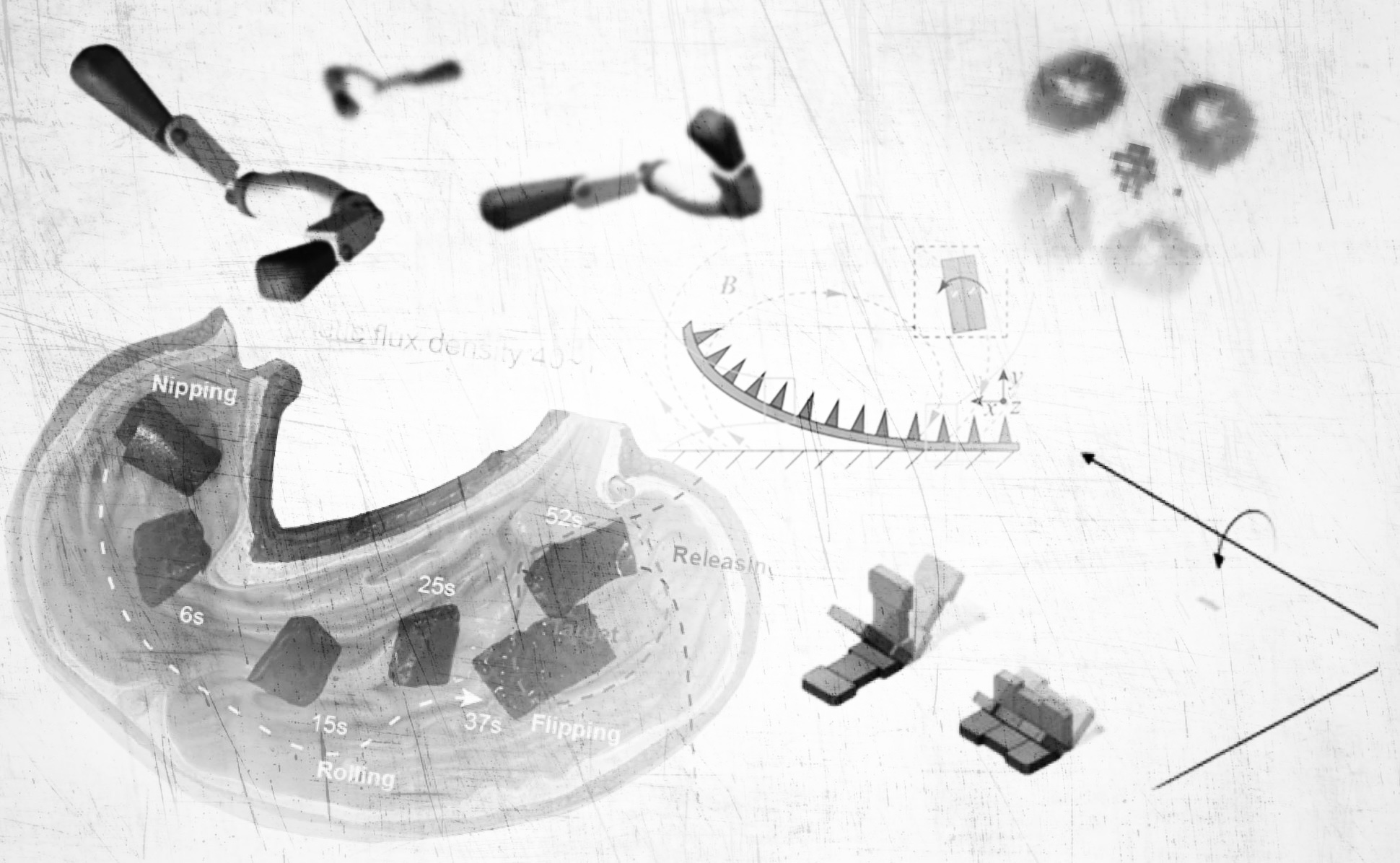
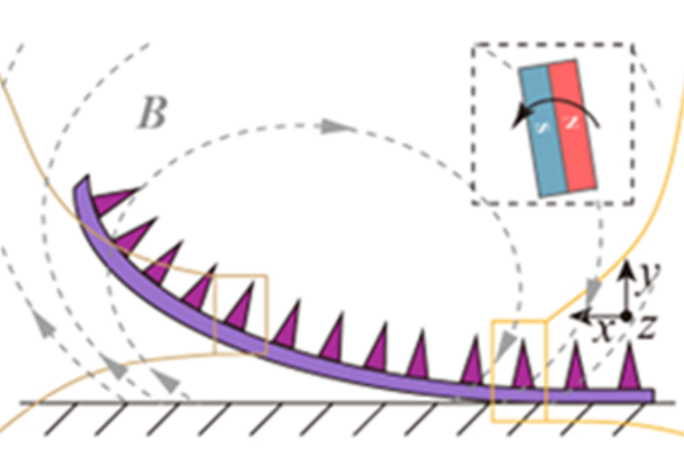
Робота не зря называют мягким: он умеет изгибаться, сворачиваться и перемещаться, как гусеница. Для этого у него есть маленькие лапки — они же нужны для захвата крошечных объектов.
Ножки робота держат крошечный объект
Технология изготовления
Магнитное поле используют не только для управления роботом, но и для его «программирования» — формирования ножек из ферромагнитной массы.

Чашки Петри над постоянным магнитом. Источник
Вещество помещают в чашку Петри и распределяют по поверхности, под которой расположен постоянный магнит. В результате масса поляризуется и вытягивается по направлению магнитного поля.
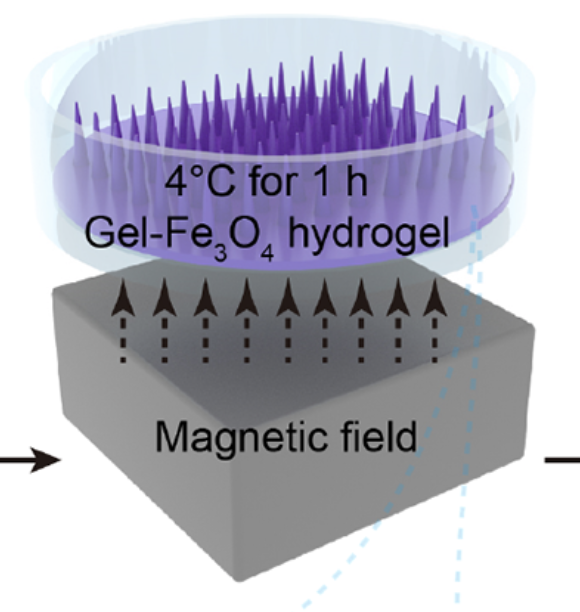
Воздействие магнитного поля на вещество робота. Источник
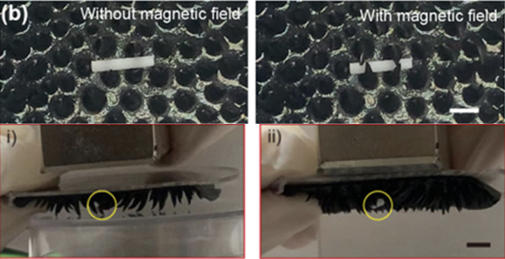
Количество ножек можно регулировать — достаточно изменить расстояние от чашки до магнита: чем оно меньше, тем больше ножек. Аналогичная ситуация с мощностью магнита: хотите вырастить сотни ножек и напугать трипофоба — возьмите магнит помощнее.

Зависимость количества ножек от мощности магнитного поля. Источник
Также количество ножек зависит от толщины исходного слоя, который нанесен на поверхность чашки. Исследователи утверждают, что для робота достаточно слоя толщиной 800 мкм.
Для «сохранения настроек» — застывания ферромагнитной массы — нужно добавить раствор сульфата аммония. В течение 12 часов образуется гидрогель, которым можно манипулировать с помощью внешнего магнитного поля.

Управление роботом
Принцип действия прост. При поднесении магнита отдельные части робота — например, правая и левая стороны — «заряжаются» разными магнитными моментами. То есть сворачиваются в разные стороны: правая часть робота упирается в пол, а левая — поднимается.
Скручивание робота под действием магнитного поля. Источник
Перемещая и поворачивая магнит, можно управлять роботом — заставлять его сгибаться и двигаться кувырками.
Робот перемещается кувырками
То же самое происходит и с ножками: из-за разных магнитных моментов щупальца сжимаются в разные стороны и делают захват.

Воздействие магнитного поля на ножки робота. Источник
Во время тестирования робота самый тяжелый грузик, который смогла поднять пара ног, — резинка массой 0,3 г. Это почти в 6 раз больше массы ножек.
Область применения
Авторы проекта отмечают, что гидрогелевые роботы хорошо подходят для доставки лекарств в отдельные области организма. Пример — модель движения робота в желудке.

Модель движения робота в желудке. Источник
К тому же гидрогелевый робот растворяется в пределах 48 часов и не мучает ЖКТ.
Astrei
Я голосую за настоящего медицинского робота для магнитной манипуляции, а не эти игрушки из статеек:
Позволяет точно управлять кончиком гибкого катетера, вводимого через бедренную артерию прямо до сердца и делать всякие крутые штуки там изнутри.