
Вступление.
Многим сервисам критически важно иметь информацию о местонахождении подключенных устройств. Кикшеринг — не исключение. Нам в Whoosh нужно отслеживать каждый отдельно взятый самокат в каждый отдельно взятый момент времени. Поэтому все наши самокаты оснащены навигационным приемником, или как его еще называют, GNSS модулем. Однако, технология спутниковой навигации, несмотря на свою чрезвычайную популярность обладает и рядом недостатков. Например, навигационный приемник относительно легко сбить с толку, то есть заглушить или исказить принимаемый им сигнал. В результате, получаемое пользователем местоположение не будет иметь ничего общего с действительностью. И бороться с этим достаточно сложно. Поэтому на помощь спутниковой навигации приходят другие, альтернативные способы определения местоположения, такие как инерциальные навигационные системы (ИНС), определение местоположения по базовым станциям и WiFi точкам и т.д.
И сегодня мы поговорим об ИНС, а точнее об одном из необходимых элементов подобных систем — магнитометре, а еще точнее о том, как его калибровать.
Коротко о магнитометре.
Датчик, как правило трехосевой, измеряет магнитное поле, по сути трехмерный компас.
Историю создания, особенности строения, варианты исполнения и прочее предлагаю опустить. Скажем лишь только, что в контексте данной статьи речь идёт о MEMS магнитометрах, наподобие тех, что стоят в наших смартфонах. Обычно такие магнитометры делают на основе эффекта Холла или силы Лоренца.
А зачем вообще калибровать?
В идеальном мире идеальный компас, использующий идеальный магнитометр, видел бы только магнитное поле земли и показывал бы всегда идеально на магнитный север. Но на практике в показаниях магнитометра, в нашем случае установленного на печатной плате, присутствуют магнитные поля соседних индуктивностей и всех проводников, которые под действием магнитного поля земли и иных источников также намагничиваются. Собственно это и есть два основных вида помех, которые еще называют hard-iron и soft-iron distortions [1].
А названы они так в честь двух разновидностей ферромагнетиков — магнитотвердых и магнитомягких.
Первые по сути своей постоянные магниты, их присутствие по соседству с магнитометром приводит к тому, что он измеряет значение магнитного поля земли + значения магнитных полей этих самых магнитотвердых материалов. Вот только при вращении магнитометра в пространстве, вектор магнитного поля земли вращается относительно магнитометра, а вот hard-iron помехи остаются неизменными (так как когда мы вращаем магнитометр, положение севера относительно него меняется, а вот положение соседних с ним на плате элементов — нет). Этот факт и поможет нам в дальнейшем при компенсации hard-iron помех.
А что касаемо soft-iron, то их создают все проводники, находящиеся неподалеку от магнитометра. Они намагничиваются в магнитном поле земли и, тем самым, имеют свое собственное магнитное поле, однако оно, в отличие от hard-iron, изменяется при вращении магнитометра в пространстве в соответствии с этим вращением.
В рамках этой статьи мы осознанно будем игнорировать soft-iron помехи, потому что по сравнению с hard-iron они не столь существенно влияют на работу магнитометра.
А что будет, если вообще не калибровать?
Вполне резонный вопрос. Магнитометр чаще всего используется в компасах, и компас на основе не откалиброванного магнитометра скорее всего будет указывать всегда в одном и том же направлении. Поэтому некоторые, возможно, сталкивались с тем, что иногда приходилось крутить телефон восьмеркой, чтобы навигатор нормально работал. А те, кто знаком с квадрокоптерами, знают, что одним из элементов предполетной подготовки является вращение коптера вручную, причём как в обычном положении, так и боком. Собственно, это делается как раз для того, чтобы откалибровть датчики, установленные на борту, в том числе и магнитометр.
Вращать самокат перед каждой поездкой — это, конечно, идея, но не думаю, что она придется по душе нашим юзерам.

Какие способы калибровки существуют?
Хотел бы я дать ссылку на Вики, где были бы кратко и лаконично расписаны существующие способы калибровки магнитометра, но там пусто.
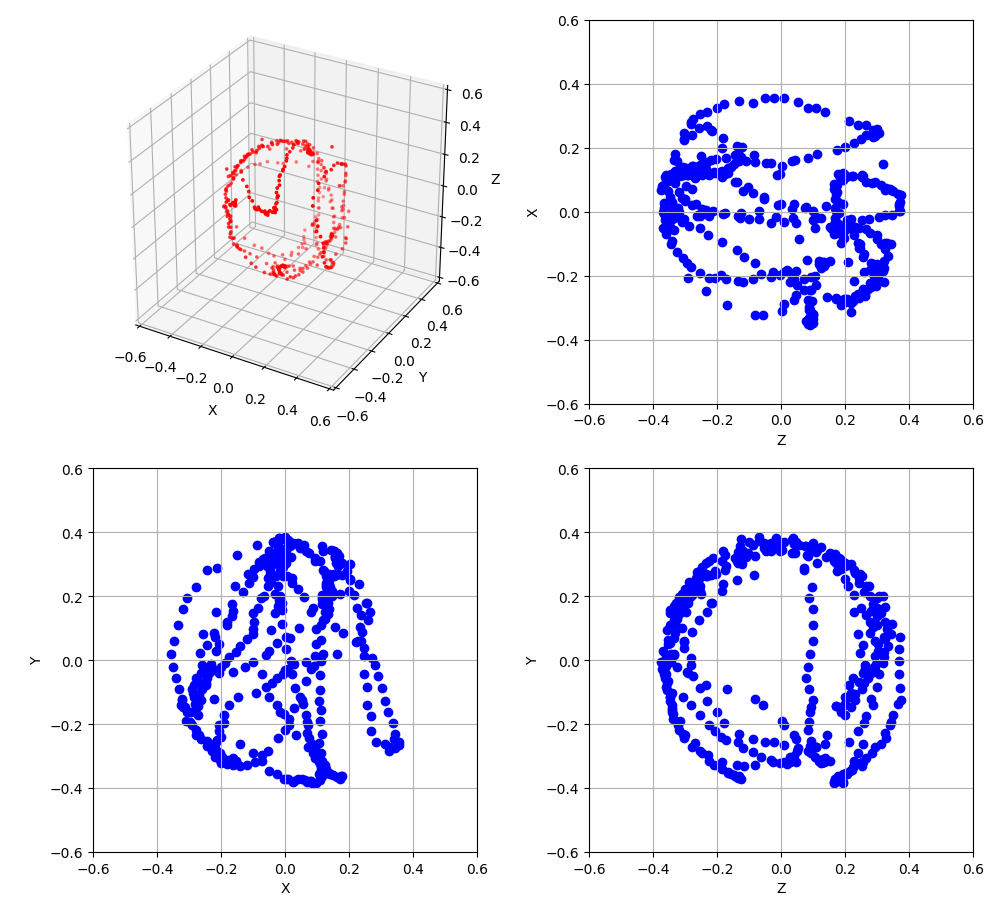
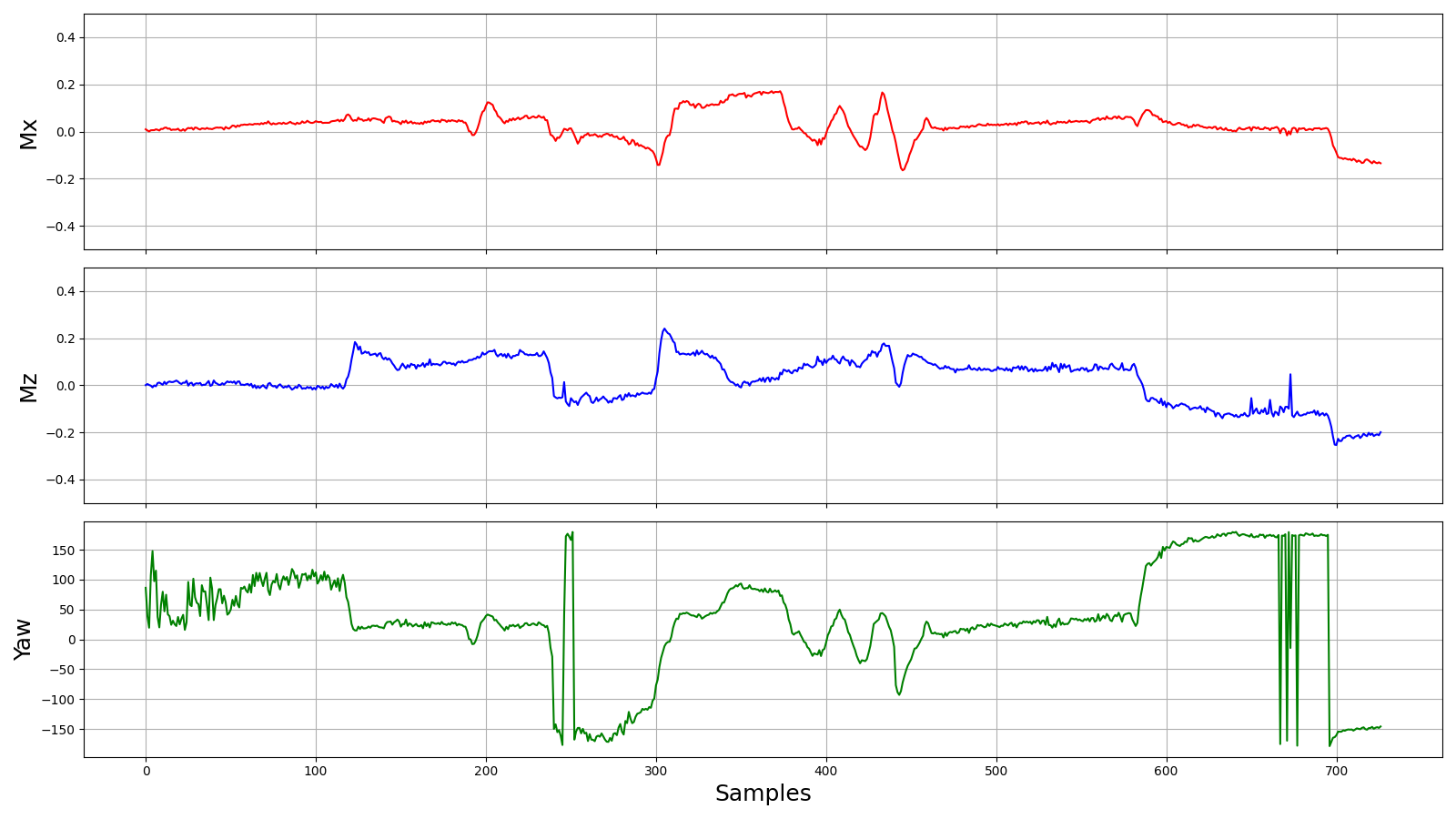
А вообще, давайте отложим в сторону Google и chatGPT и попробуем решить эту задачу сами. Для того, чтобы было на что опереться, я записал данные с магнитометра, покрутив им пару хороших восьмерок.

Дано: трехосевой датчик, которым нужно измерить конкретный вектор, однако мы знаем, что помимо этого вектора в измерениях датчика присутствует некая постоянная помеха (soft-iron осознанно игнорируем). Как мы писали ранее, особенность этой помехи в том, что ее положение в системе координат датчика неизменно, в то время как положение искомого вектора неизменно относительно глобальной системы координат.
Решение: Для начала давайте ограничимся двумя осями X и Y. Для любого произвольного положения датчика в пространстве, измерение (допустим по оси X) будет содержать помехи и какое-то значение искомого вектора
. Если мы будем вращать датчик в пространстве вокруг оси Z, то все измерения будут лежать на окружности (эллипсе, если всё-таки не игнорировать soft-iron) со смещенным относительно нуля центром. Наша задача найти это смещение, и кажется что сделать это можно просто взяв
для каждой из осей. Так и сделаем.
Для данных с графиков выше, найдем значение смещения по всем осям:
Теперь, если применить полученные смещения, то наша сфера окажется приблизительно в точке , собственного этого мы и добивались.
Итого: мы изобрели простейший метод калибровки, назовем его “кручу-верчу, откалибровать хочу”. А теперь прежде чем подавать заявку на патент и звонить маме, чтобы сказать ей, что ты не зря учился в универе шесть лет, давайте все же загуглим, какие существуют нормальные методы калибровки. (Хотя маме позвонить все равно можно, это никогда не лишнее)
В англоязычной литературе самый часто встречаемый способ калибровки магнитометра это ellipsoid fitting. Например вот здесь [2] и здесь [3]
Если вкратце, то при достаточном количестве измерений, они +/‑ укладываются на поверхность эллипсоида. И если найти параметры этого эллипсоида, то это и будут наши калибровочные коэффициенты, причем как hard‑iron так и soft‑iron. Для этого обычно используют метод наименьших квадратов. Правда точность зависит от того, насколько равномерно измерения будут распределены по поверхности эллипсоида, а чтобы этого достичь нужно вращать магнитометр по всем трем осям, в нашем случае вращать вместе с самокатом (который весит 30+кг), иначе пропадает смысл калибровки. (Лео, прости) Но делать мы этого не станем, хотя я где‑то слышал, что если в день два раза такую калибровку делать, то спина вообще болеть не будет.
Ищем дальше.
Много слов, мало дела. Давай калибровать.
Ладно, в целом кажется, что тут вся суть во вращении. То есть пока хоть сколько-нибудь самокат не покрутишь, откалибровать магнитометр никак не получится. А что если использовать вращения, которые совершает пользователь во время поездки? Да, конечно, редко кто ездит на боку или вверх ногами, но и ехать постоянно прямо тоже сложно. Иными словами какие-то вращения в плокости дороги (то есть повороты) у нас есть, и мы можем откалиброваться в одной поездке, а уже в следующей у нас будет рабочий компас.
Звучит заманчиво.
Для этого нам нужны измерения получаемые с датчика во время поездки, причем желательно накопить их как можно больше. Плюс по итогам поездки эти данные нужно где-то обработать, причем весь массив одновременно.
Уже не так заманчиво.
Но все же попробуем. Сделаем прошивку для скутера, которая будет во время поездки (пока что тестовой) собирать данные магнитометра и засылать их на бэкенд.
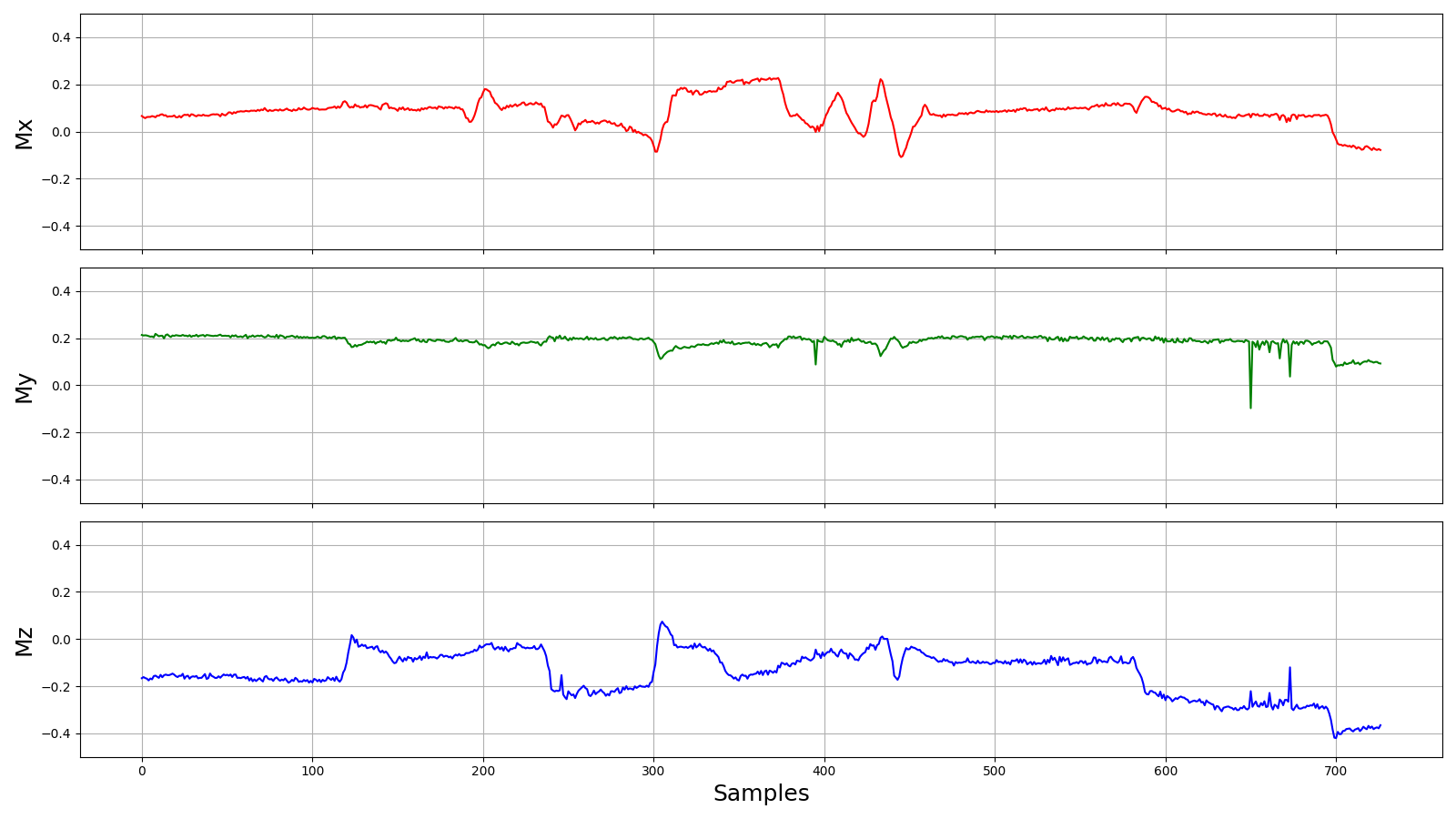
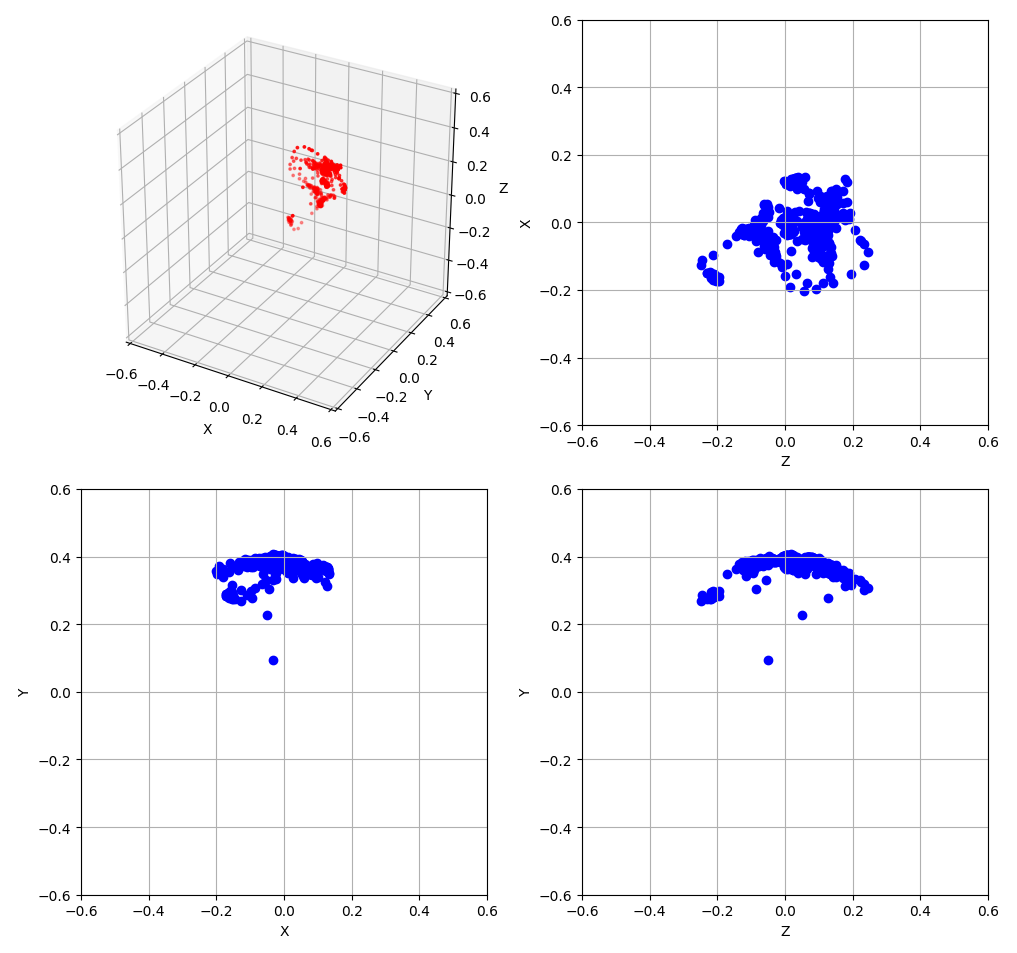
Нетрудно заметить разницу с данными, которые мы получили при вращении магнитометра восьмёрками. Скорее всего по одной из осей нормальную калибровку провести не удастся. Но вдруг для того, чтобы знать где север нам этого и не нужно? Давайте проверим. Примеров реализации ellipsoid fitting в сети достаточно, поэтому возьмем один из них.
from scipy import linalg
def non_rotated_ellipsoid_fit(x, y, z): # будем считать, что эллипсоид не повернут
x = x[np.newaxis].T
y = y[np.newaxis].T
z = z[np.newaxis].T
D = np.hstack((x*x + y*y - 2*z*z, x*x + z*z -
2*y*y, 2*x, 2*y, 2*z, 1 + 0*x))
d2 = x*x + y*y + z*z
u = np.linalg.inv(D.T@D)@D.T@d2
v = np.array([u[0] + u[1] - 1, u[0] - 2*u[1] - 1, u[1] - 2*u[0] - 1])
v = np.vstack((v, [0], [0], [0], u[2:]))
A1 = np.hstack((v[0], v[3], v[4], v[6]))
A2 = np.hstack((v[3], v[1], v[5], v[7]))
A3 = np.hstack((v[4], v[5], v[2], v[8]))
A4 = np.hstack((v[6], v[7], v[8], v[9]))
A = np.vstack((A1, A2, A3, A4))
v789 = np.vstack((v[6], v[7], v[8]))
ofs = -np.linalg.inv(A[0:3, 0:3])@v789
Tmtx = np.eye(4)
Tmtx[3, 0:3] = ofs.T
AT = Tmtx@A@Tmtx.T
ev, rotM = np.linalg.eig(AT[0:3, 0:3]/-AT[3, 3])
gain = np.sqrt(1/np.abs(ev))
signs = np.sign(ev)
gain = gain*signs
return ofs, gain, rotM, ev
ofs, _, _, _ = non_rotated_ellipsoid_fit(mx, my, mz)
print(', '.join([f'{x:.3f}' for x in ofs[:, 0]]))
Получаем наши смещения: .
То есть по тем двум осям, в которых у нас присутствовали изменения по мере поездки, мы получили более-менее нормальные калибровочные коэффициенты.
На графике выше я откалибровал оси X и Z, а также добавил график угла курса посчитанного “в лоб” как arctan значений mx и mz, и он даже немного похож на правду.
В целом, с этим можно жить. Хоть жить долго и счастливо не получится. И на то есть несколько причин:
передача этих данных на бэк генерирует много трафика, здесь нужна какая-то оптимизация;
при относительно прямых поездках коэффициенты будут рассчитаны некорректно, нужна проверка;
для повышения точности неплохо бы считать по нескольким поездкам, тогда нужно где-то хранить эти данные.
В целом, решив задачу сжатия исходных данных без потери качества определения калибровочных коэффициентов, мы решим и оставшиеся проблемы. То есть, если данных будет меньше, то и за трафик вроде уже не так страшно, да и хранить можно больше поездок при том же объеме в хранилище. Хорошо, а как будем тогда сжимать?
С точки зрения калибровки, нам интересны именно вращения, то есть десять одинаковых измерений нам точности не добавят, следовательно можно отбрасывать близкие друг к другу измерения. Также, нам известны пределы измерения нашего датчика, то есть +100500 Гс мы никак не получим.
Имея все это ввиду, как бы вы подошли к этой задаче? Ниже опишу, как мы решили это сделать.
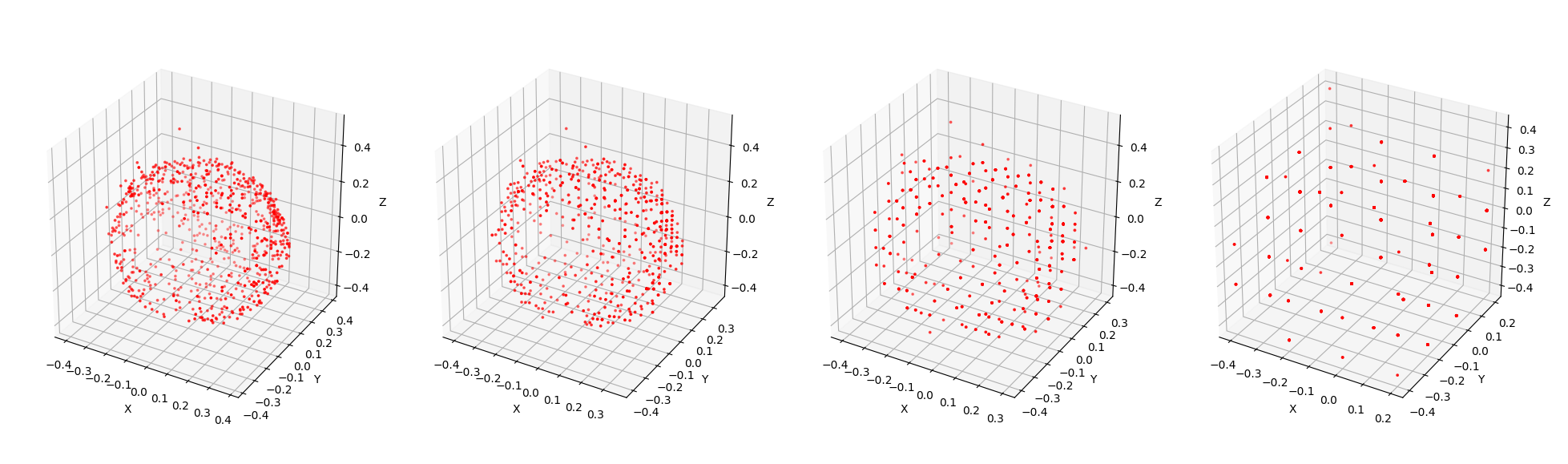
Возьмем пределы измерений по всем трем осям, и разобьём их на конечное число отрезков. Так, например, по оси X диапазон возможных значений лежит от -4 до +4, учитывая, что точность в несколько тысячных нам ни к чему (по сути это все равно будет +/- шум), мы можем этот диапазон разбить, например, на 800 отрезков. И так по всем трем осям. Так мы получим большой куб, разбитый на 512 000 000 маленьких кубиков. А чтобы еще больше все запутать, давайте каждому маленькому кубику поставим в соотвествие некий индекс, который состоит из трех чисел: порядкового номер отрезка, в котором находится кубик по оси X, а также по Y и по Z. Предвкушаю вопрос: ЗАЧЕМ? Попробую объяснить на примере.
data = [
{'Mx': 0.917372, 'My': -0.000366, 'Mz': 0.420539},
{'Mx': 0.899013, 'My': 0.004562, 'Mz': 0.419935},
{'Mx': 0.916934, 'My': -0.001366, 'Mz': 0.420690}
]
for item in data:
print(
int((item['Mx'] + 4) * 100),
int((item['My'] + 4) * 100),
int((item['Mz'] + 4) * 100)
)
491 399 442
489 400 441
491 399 442
Видно, что первое и третье измерения, хоть и отличаются по своим исходным значениям, но имеют абсолютно одинаковые индексы, поэтому первое мы можем оставить, а третье отфильтровать.
Итого. Мы можем реализовать калибровку магнитометра, используя отфильтрованные и преобразованные данные, записанные в поездках, передавая их на бэкенд и обрабатывая там, а затем возвращая полученные коэффициенты обратно на самокаты. При этом нам еще необходимо ко всему этому прикрутить валидацию полученных коэффициентов, а также автоматическую перекалибровку…
Ясно, понятно. Какие еще есть варианты?
Пока я искал существующие варианты калибровки, я несколько раз натыкался на методы в которых также используются другие датчики, такие, как например гироскоп. А также встречал методы, которые не требуют сбора большого массива данных, а работают как бы на лету.
Ну а что? Это было бы замечательно, не нужно ничего никуда пересылать, собирать и так далее. Все происходит непосредственно на самокате и при этом работает, даже если не крутить его во все стороны, а просто ездить на нем.
Две работы меня особенно заинтересовали, там используются показания гироскопа и расширенный фильтр Калмана [4] и [5].
Вектора, матрицы и много математики. Ну что ж.
Не будем вдаваться в детали относительно фильтра Калмана, про него и так уж слишком всего на хабре, попробуем лишь в общих чертах описать, что здесь происходит.
Мы уже выяснили, что для калибровки магнитометра нам необходимы вращения, но если мы не хотим без разбора вращать самокат во все стороны, то как нам быть?
А что если мы будем знать куда именно мы вращаем, поможет ли это с калибровкой?
Да, и именно тут нам пригодится гироскоп.
В публикации [4] основой предложенного метода является зависимость между показаниями гироскопа и магнитометра:
где - откалиброванные показания магнитометра,
- номер итерации,
- период времени между итерациями, а
- матрица, состоящая из показаний гироскопа на предыдущей итерации
:
Таким образом, нам по сути не столь важно в каком положении в пространстве магнитометр находился в предыдущей итерации. Однако, зная значение вектора , и зная по гироскопу как всё обернулось, мы можем предсказать новое значение
. Причем работает это только для откалиброванного магнитометра, то есть если мы возьмем в качестве вектора состояния откалиброванные показания магнитометра и значения помех, то задача нашего фильтра сводится к тому, чтобы определить при каких значениях помех, зависимость выше будет выполняться.
Единственное, так как у нас есть и гироскоп и акселерометр, мы можем использовать показания с фильтра Маджвика (его мы уже реализовали), в котором они объединены. В публикации [5] как раз именно так и сделано, только используется фильтр Махони, но это не принципиально, главное, что мы можем выразить через
и
. То есть, вместо
у нас будет:
,
где ,
а - матрица ориентации в пространстве.
Так, а что в итоге получается?
Для начала попробуем реализовать это на python, правда с одним небольшим отличием от того, что вы можете видеть в публикациях: мы уберем W, совсем, потому что эта матрица отвечает за soft-iron искажения, а их мы игнорируем. Это незначительно понизит точность калибровки, однако позволит при этом уменшить в два раза размерность некоторых векторов и матриц. Если бы реализовывать этот алгоритм нужно было бы на python, я бы скорее всего не заморачивался, from scipy import linalg и в путь, но наша конечная цель — это рабочий алгоритм на IoT модуле, то есть на языке C, причем на микроконтроллере, поэтому оптимизируем всё, что можно.
Сначала инициализируем наш фильтр:
Этап предсказания:
Этап корректировки:
Что означает и представляет из себя каждая матрица можно почитать здесь, на мой взгляд это одна из самых понятных статей по фильтру Калмана на хабре.
В итоге наш фильтр в качестве вектора состояния имеет откалиброванные показания магнитометра и калибровочные коэффициенты (смещения по всем трем осям). На этапе предсказания он определяет, каков будет новый вектор состояния исходя из матрицы , которая характеризует изменение положения в пространстве относительно предыдущего состояния. На этапе корректировки он расчитывает ошибку предсказания. Иными словами, он, используя новые неоткалиброванные измерения, определяет то, насколько промахнулся с предсказанием. А затем полученную ошибку домножает на специальный коэффициент усиления и корректирует свое предсказание. Таким образом, каждое, даже самое незначительное изменение положения магнитометра в пространстве, приближает нас к определению калибровочных коэффициентов, то есть таких значений b, при которых выполняется
,
где
Приведем для сравнения калибровочные коэффициенты, полученные разными методами и для разных ситуаций.
Повороты |
ellipsoid fitting |
0.09 |
-0.185 |
-0.135 |
Повороты |
фильтр Калмана |
0.09 |
-0.209 |
-0.146 |
Восьмерки |
ellipsoid fitting |
0.123 |
-0.212 |
-0.160 |
Восьмерки |
фильтр Калмана |
0.119 |
-0.211 |
-0.173 |
Тест. поездка |
ellipsoid fitting |
0.056 |
0.08 |
-0.167 |
Тест. поездка |
фильтр Калмана |
0.099 |
-0.158 |
-0.185 |
По таблице видно, что результаты работы обоих методов калибровки примерно схожи, но при этом если обратить внимание на данные по тестовой поездке, то можно заметить, что фильтр Калмана позволяет определять еще и смещение по оси, по которой особо не было вращений.
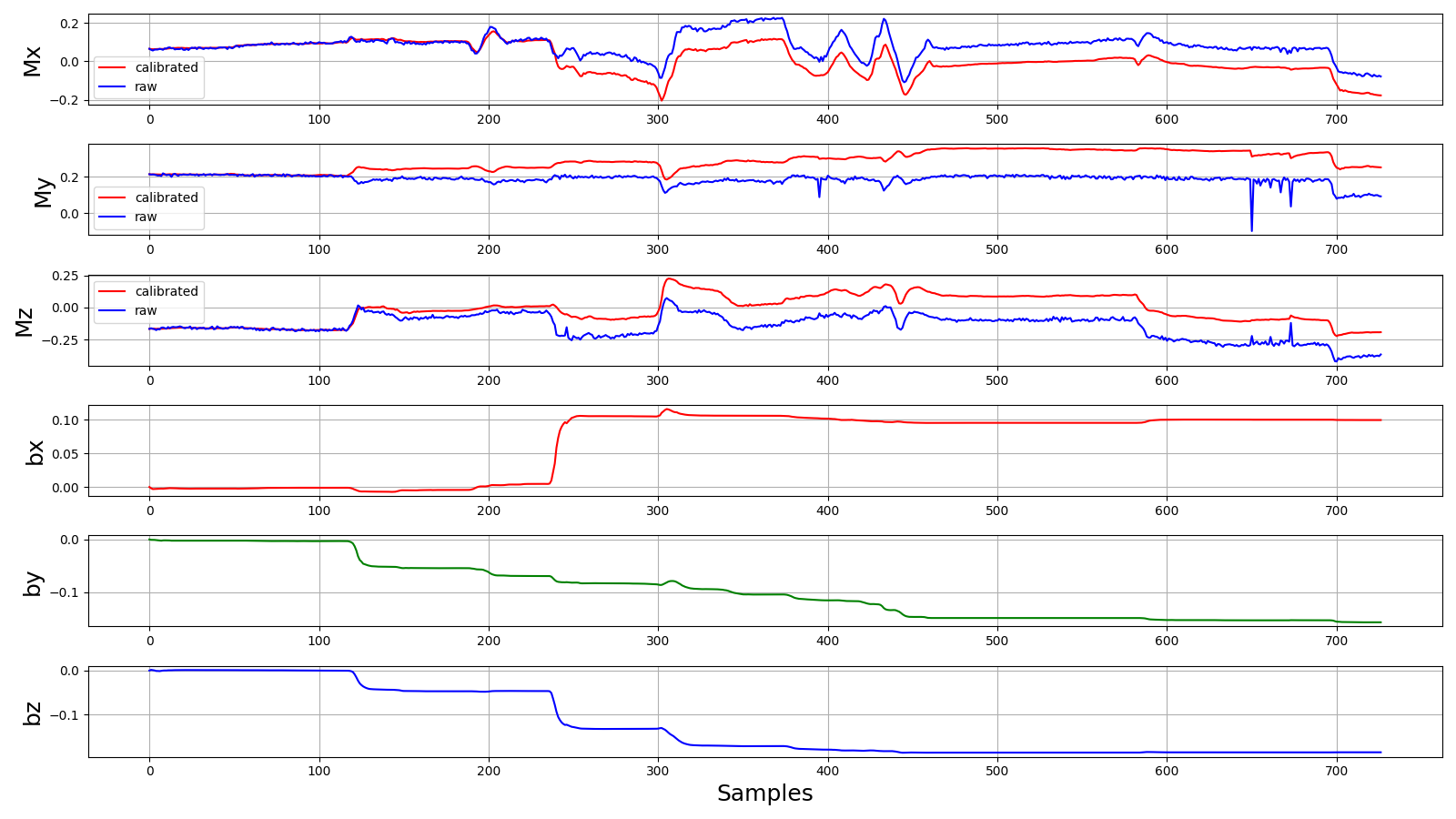
На первых трех графиках показаны первые три составляющие вектора состояния фильтра (то есть откалиброванные значения) и сырые данные магнитометра. На последних трех — последние три составляющие вектора состояния (то есть смещения по всем трем осям). Хорошо видно, как по мере вращений вокруг той или иной оси фильтр подправляет определенные им смещения.
Ниже приведу аналогичные графики, но уже для множества вращений вокруг всех трех осей.
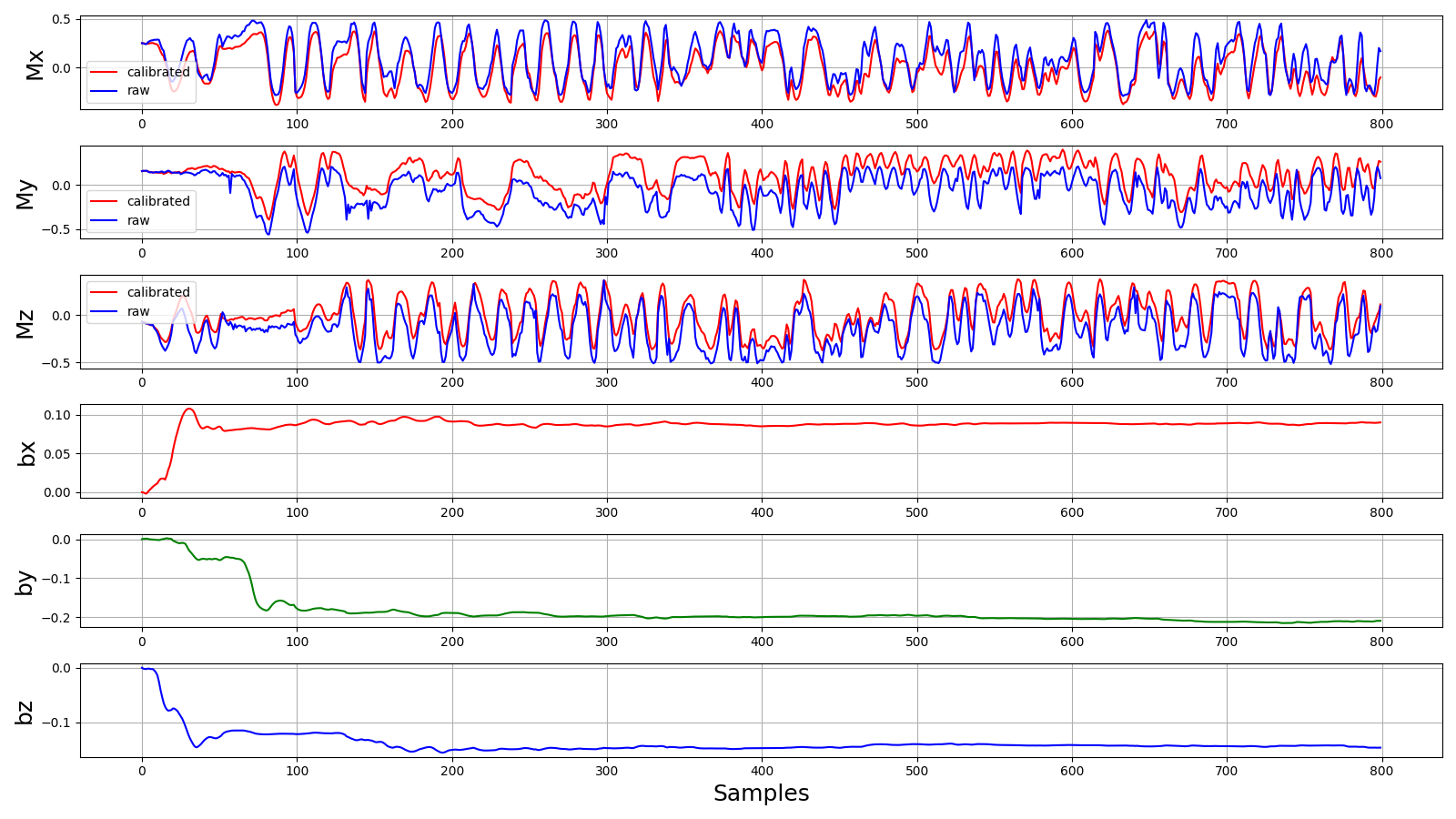
Здесь также видно, что после определенного количества вращений, фильтр как бы сходится к конкретным значениям смещений, это как раз именно то, к чему мы и стремились. Успешный успех.
Осталось только перенести это с Python на Си, но здесь ничего особенно интересного, поэтому лишь укажу ссылку на проект, который служил в качестве примера реализации библиотеки с матрицами.
Если после всех этих матриц и графиков вы уже забыли, ради чего всё это, то я вам напомню: нам нужен компас. Причем не просто для того, чтобы знать где север, а для того, чтобы, используя дополнительную информацию (например, скорость передвижения), определять местоположение. Иначе говоря, зная в каждый момент времени в каком направлении мы движемся и с какой скоростью, мы можем построить траекторию движения, то есть трек. А если мы при этом еще и знаем откуда стартовали, то мы (с определенной погрешностью) можем сказать куда мы прибыли.
В качестве примера рассмотрим ситуацию, когда пользователь взял самокат в поездку, но по каким-то причинам у нас не работает GPS, и мы знаем только координаты парковки, с которой началась поездка.
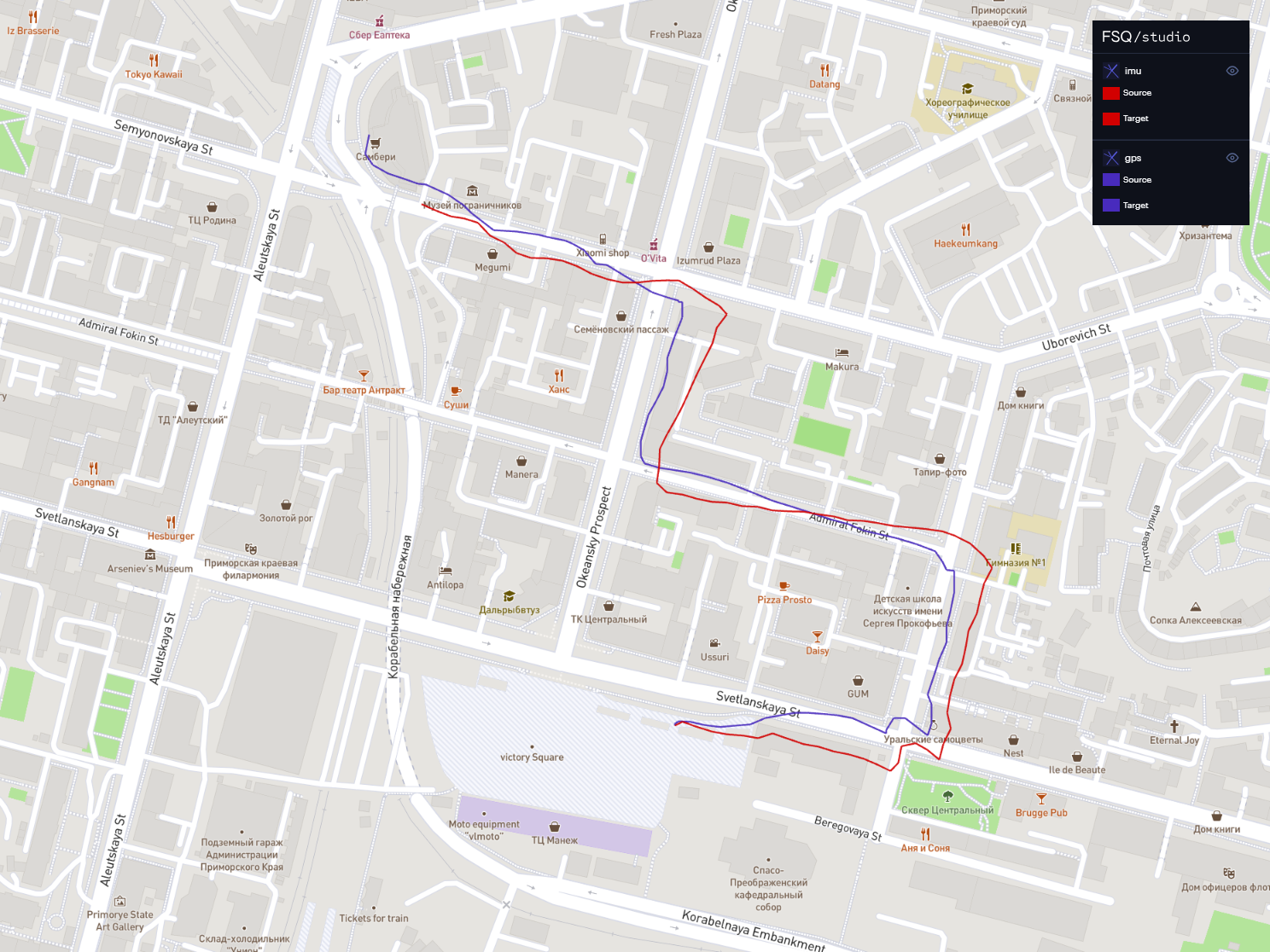
На данной карте, внизу, там откуда начинаются обе линии, находится парковка, с которой пользователь начал поездку. Синим обозначен трек по GPS, а красным — трек, который мы построили по компасу и информации о скорости движения (её мы получаем от контроллера мотор-колеса). Даже если бы в этой поездке не было никаких GPS координат, мы бы все равно имели информацию о его местоположении, причем с точностью в пару десятков метров (что очень даже прилично и всегда лучше, чем совсем ничего).
Послесловие
Помните, как в фильмах с Джеки Чаном, в конце во время титров показывали смешные моменты и неудачные дубли? Так вот…
Изначально, как только я перевел формулы в код на python, казалось, что оно заработало, НО при определенных вращениях фильтр вёл себя мягко говоря странно: вместо того, чтобы стремиться к каким-то фиксированным значениям смещений, он начинал их уменьшать или увеличивать, пока они не убегали в бесконечность.
Я очень долго искал в чем может быть проблема, проверил все (почти все) уравнения и в какой-то момент уже почти отчаялся. Покоя не давал тот факт, что в обеих публикациях на основе которых я пытался реализовать фильтр, был рабочий пример с данными и графиками. Значит, лыжи все-таки едут…
В одной из публикаций наряду со списком авторов был указан адрес электронной почты, на который я написал письмо. Но ответа не последовало, впрочем сама идея попытки связаться с авторами забрезжила в моей голове лучиком надежды.
Поэтому я решил не сдаваться и начал сталкерить пытаться найти контакты всех ученых, чьи имена встречались в интересующих меня публикациях. Никаких полуночных смсок не было, не переживайте, всё ограничивалось одним электронным письмом с вопросами по реализации алгоритма (даже без упоминания половины наследства от африканского принца в качестве платы за помощь). И на удивление, буквально через день мне пришел ответ от Ke Han, причем из небезызвестной компании Intel, с прикрепленным архивом, в котором было несколько матлабовских скриптов и csv-файлы с тестовыми данными, которые использовались при написании публикации [4]. На радостях я побежал быстро сверять свой код с тем, что было в их скриптах и прогонять их тестовые данные. И всё это только чтобы обнаружить, что мой код на питоне по-прежнему не работает… Короче, не помогло. Хотя я искренне не ожидал, что получу хоть какой-то ответ, тем более от сотрудника Intel, тем более так быстро, и уж тем более содержащий то, о чем я просил.
Отчаившись совсем, я начал проверять все формулы и весь код буквально по буквам, параллельно расписывая на листочке всё, что происходит с данными.
И нашел опечатку, причем именно в том месте, в котором меньше всего сомневался: там где нужно вычислить я брал
вместо
. И эта коварная опечатка всё ломала, но не так чтобы совсем.
Мораль — семь раз проверь формулы и код, один раз пиши письмо китайским ученым.
Ну а если серьезно, надеюсь вам интересно и познавательно было читать этот рассказ. Желаю всем гореть своим делом, но не выгорать!
Список литературы
Ozyagcilar, T. "Calibrating an eCompass in the Presence of Hard and Soft-iron Interference."
Cheng Chi et al 2019 IOP Conf. Ser.: Earth Environ. Sci. 237 032015
K. Han, H. Han, Z. Wang and F. Xu, "Extended Kalman Filter-Based Gyroscope-Aided Magnetometer Calibration for Consumer Electronic Devices," in IEEE Sensors Journal, vol. 17, no. 1, pp. 63-71, 1 Jan.1, 2017, doi: 10.1109/JSEN.2016.2624821.
Комментарии (22)

vvbob
06.10.2023 10:03+2А что если крепить датчик на вращающемся подвесе, и в момент когда самокат припаркован просто крутить его туда-сюда двигателем для калибровки? Не думаю что это будет очень сложно и дорого, двигатель можно самый маломощный использовать.

faruk_yussuf Автор
06.10.2023 10:03К сожалению, если датчик расположен внутри самоката, а в нашем случае так и есть, то и вращать его нужно вместе с самокатом. Плюс, если крепить датчик на вращающийся подвес, то встает вопрос прочности всей этой конструкции, а прочность — это очень важный момент, особенно если речь идет именно о шеринговом самокате.
vvbob
06.10.2023 10:03Шарик внутри другого шарика, на скользящих подшипниках (в масле или шариковых) конструкцию можно сделать неубиваемую, которая легко будет переносить серьезные перегрузки. Это реально сделать компактно и спрятать внутри.

hogstaberg
06.10.2023 10:03Дороже рабочей софтварной калибровки будет в любом случае. А ещё механика может сломаться. А ещё провода к подвижному датчику непонятно как приладить. А ещё сам неподвижный самокат для подвижного магнитометра будет одним большим куском hard iron помех.
Вообще в мире микроконтроллеров если можно что-то реализовать в софте, это стоит реализовать в софте. По крайней мере когда речь идёт не о единичных и уникальных устройствах.
vvbob
06.10.2023 10:03Все может сломаться. Электронику можно залить, от удара могут чипы отлететь и т.п. Провода можно приладить - вращать все можно с ограничением по углу - на 360 например, и сделать петлю из провода достаточной длины.
Преимущество перед чисто софтовым решением (а расчеты в любом случае потребуются, в т.ч. и для учета влияния тельца самоката), КМК в том, что так можно добиться сильно большей точности учета коэффициентов помех. В данном случае точность точно лишней не будет, от этого зависит насколько сильно расчетные координаты отклонятся от реальных. Если самокат перегонят в другой конец города, то разброс значений может быть таким, что его уже и не найдешь в плотной застройке.
ЗЫ, можно пойти дальше и вовсе от проводов отказаться - показания снимать по радиоканалу, а питание подавать через индуктивную связь, как с RFID, энергии датчик потребляет немного. В принципе такую штуку можно сделать довольно прочной, и недорогой при более-менее массовом производстве.


wataru
06.10.2023 10:03+3Праграф про сжатие данных, отрезки и приведение к индексам можно дополнить. Этот прием называется "квантованием". Используется во многих алгоритмах сжатия с потерями.
Отличная и очень интересная статья, спасибо!
faruk_yussuf Автор
06.10.2023 10:03Спасибо!
Похоже мы заново изобреливелосипедквантование)wataru
06.10.2023 10:03+2А вот еще идея. Ведь показания вот этого инерционного датчика движения можно использовать вместе с джипиэсом для улучшения качества.
Или, еще лучше, можно калибровать инерционный датчик движения вместе с компасом по джипиэсу тоже фильтром калмана. Не совсем понимаю, как его прикрутить, но похоже надо считать компас и кординаты gps как измеряемые переменные, а скорость — управляющим воздействием.
faruk_yussuf Автор
06.10.2023 10:03+1Да!)
Мы в эту сторону тоже активно смотрим. Вообще, это все можно назвать Sensor Fusion, и тут может быть всякий разный Fusion для всяких разных Sensors.

Kudriavyi
06.10.2023 10:03Можно сказать, что два велосипеда. Есть готовая библиотека для ардуино, я её на си переписывался для nRF52832, но без компаса. Её применяют в свободных проектах полетных приборов для парапланов.
Фильтр Маджвика и/или Махони. Я особо не вдавался в подробности.
https://habr.com/ru/articles/255661/
Первая ссылка в гугле по запросу фильтр Маджвика
faruk_yussuf Автор
06.10.2023 10:03Фильтр Маджвика мы действительно используем, как раз для того, чтобы совместить показания гироскопа и акселерометра. Его изобретать не стали) Там все очень хорошо расписано, как у самого Маджвика, так и в множестве других источников.

da-nie
06.10.2023 10:03+1Интересно. Но есть вопросы. Как вы показания магнитометра кладёте в плоскость горизонта из системы координат устройства с которой связан магнитометр (без акселерометров? А в движении, где акселерометры при изменении ускорений врут?)? И как вы учитываете непараллельность плоскости горизонта и направления на магнитный север (13 градусов вроде как)? Так же, как вы делаете взаимную привязку каналов магнитометра друг к другу (между ними даже на одной микросхеме почему-то есть неортогональность) и магнитометра к гироскопам и акселерометрам? Я вот ответа на эти вопросы пока не придумал. :)
faruk_yussuf Автор
06.10.2023 10:03Это всё очень интересные вопросы)
Для калибровки совмещать плоскость горизонта с системой координат магнитометра не нужно, там важны только относительные изменения положения магнитометра в пространстве. А вот для того, чтобы на его основе сделать компас — это просто необходимо. У ребят из nxp есть классный application note "Implementing a Tilt-Compensated eCompass using Accelerometer and Magnetometer Sensors", правда без vpn его не посмотреть, но там все прям хорошо расписано. Собственно, вот этот самый tilt-compensation делается при помощи акселерометра, а чтобы он не врал, к нему еще добавляют гироскоп. Причем они компенсируют негативные эффекты друг друга (дрейф и шумы). Чтобы их подружить, мы использовали фильтр Маджвика, на выходе он дает нам roll и pitch. И вот именно эти два угла ориентации в пространстве и позволяют нам докрутить плоскости магнитометра до глобальной системы координат и получить третий угол, то есть курс (yaw). Причем для его определения, мы используем только те две составляющие откалиброванных и повернутых показаний магнитометра, которые оказываются в плоскости горизонта.
Действительно, вектор магнитной индукции поля Земли не лежит в плоскости горизонта, а образует с этой плоскостью некий угол — он называется магнитным наклонением. И его можно учитывать при определении курса, но для этого используются более сложные алгоритмы определения углов ориентации в пространстве. Мы же прибегли к более простому, примерно такому, как я описал в п.1.
С неортогональностью примерно также, как и с soft-iron — несущественно, поэтому игнорируем)
Ну и соосность всех трех датчиков воспринимаем как данность. Хотя мне кажется, что если расширить и без того расширенный фильтр Калмана, то и матрицу неортогональности он может определять и все остальное.
da-nie
06.10.2023 10:03+1А вот для того, чтобы на его основе сделать компас — это просто необходимо.
Вот-вот. С акселерометрами и гироскопами в плоскость положить можно. Но есть нюанс. Представьте себе устройство, которое постоянно испытывает ускорения (так-то это почти всегда возможно). В этом случае фильтр разве не начнёт врать? Ему ведь не к чему привязаться. Как же быть в этом случае? Я проверял фильтр Мэджвика на трёх гироскопах и трёх акселерометрах при качании с отстоянием от центра качания — врёт стабильно.
он называется магнитным наклонением.
А ещё есть магнитное склонение. И где-то у меня валялась программа, которая его строила для нашего шарика в зависимости от высоты и даты. И делала она это сильно не быстро. А, и ещё там ужас какие поправки (на полюсах так вообще десятки градусов).
С неортогональностью примерно также, как и с soft-iron — несущественно, поэтому игнорируем)
Там, как я заметил, несколько градусов даже в датчике внутри микросхемы. А уж привязывать магнитометры к акселерометрам нужно обязательно. Вопрос только в том, как эти привязки определить. Хоть кольца Гельмгольца используй...
Хотя мне кажется, что если расширить и без того расширенный фильтр Калмана, то и матрицу неортогональности он может определять и все остальное.
Знать бы, как это сделать. :)
А на какую точность компаса вы рассчитываете?
faruk_yussuf Автор
06.10.2023 10:03Мы с Маджвиком тоже повозились, но его можно оптимально настроить (по-моему подбирая коэффициент усиления, точно не вспомню) и в случае с нашими датчиками и условиями эксплуатации, этот фильтр вполне сносно работает.
Сдаётся мне, для устройства, которое постоянно испытывает ускорения, Маджвик может не подойти и придется искать еще какое-то решение. Хотя, если честно, я когда это видео у него на ютубе увидел, убедился, что этот фильтр не просто ориентацию в пространстве может определять, главное реализовать его правильно.Да, без знания магнитного склонения, даже зная где магнитный север, географический точно определить не получится. Но если есть инофрмация о местоположении, хотя бы с точность до города, то используя модель можно определить и склонение, и наклонение. Есть, например, вот такой инструмент, ну а в нашем случае есть бэкенд, на который можно вынести подобные вычисления.
Я уже представляю себе кольца Гельмгольца, метра два в диаметре, и через них как штурмовики, конвеером едут самокаты - калибруются))
Знать бы, как это сделать. :)
Если углубиться в публикацию (4) из списка литературы в статье, то там как раз упоминается та самая матрица W, которая как я понял отвечает и за soft-iron и за неортогональность и за отличающиеся масштабирующие коэффициенты по разным осям.
А на какую точность компаса вы рассчитываете?
На самом деле не могу сказать что в данной ситуации мы на что-то рассчитываем, скорее отталкиваемся от того, что получаем. Очень трудно предсказать какая в итоге точность будет у того или иного алгоритма, когда речь идет о десятках и сотнях тысяч устройств, причем разных моделей и версий.
da-nie
06.10.2023 10:03Мы с Маджвиком тоже повозились, но его можно оптимально настроить
Мне вот интересно, к чему он привяжется, если акселерометры постоянно будут врать. Типичный пример — качка корабля в движении. Там постоянно изменяющиеся ускорения по разным осям.
На самом деле не могу сказать что в данной ситуации мы на что-то рассчитываем, скорее отталкиваемся от того, что получаем.
А какую точность вы сейчас получаете?

Javian
Причина, то сейчас одна. Только применяются два вида устройств — одни давят GPS, другие подменяют координаты и время. И вот попав в зону действия вторых устройств надо учитывать при расчете координат, что не может самокат ускориться до перегрузок ракеты-носителя и за десятки секунд оказаться в десятках км от первоначальной точки.
PS интересно сервисы аренды самокатов в этих зонах сейчас работают? Про таксистов недавно читал — не могут взять заказы. Приложение такую ситуацию не предусматривает и верит GPS.
faruk_yussuf Автор
Действительно в определенных зонах проблема с GPS стоит особенно остро. Причем как мы заметили, в Москве например, помимо тех двух видов устройств о которых вы написали, встречаются еще такие, которые таким образом подменяют gnss сигналы, что устройство не просто мнгновенно перемещается в другую локацию, а начинает постепенно двигаться в одном направлении (физически, естественно, оставаясь на месте). Так что да, способов попортить геолокацию существует множество, но как и всегда, есть немало способов ее улучшить. В случае с той же Москвой, очень хорошо помогает позиционирование по базовым станциям и wifi точкам. Такой сервис есть например у Гугла.
Отвечая на ваш вопрос, сообщаю: работаем, как и прежде. Но в проблемных местах прибегаем к помощи дополнительных источников о местоположении.