

Привет всем! Хочу рассказать о создании небольшого коптера, который может летать самостоятельно, без посредственного управления через радиоаппаратуру, и при этом осуществлять съемку. Идея зародилась перед очередным путешествием в Азию. Хотелось с собой взять коптер и поснимать с него, но при этом тащить минимум электроники и комплектующих, а также, чтобы сам коптер занимал совсем немного места.
Сразу хочу представить результат этой затеи — отснятое видео, а ниже описать из каких комплектующих собран коптер, как он настроен и с какими трудностями пришлось столкнуться при эксплуатации данного устройства.
Конструкция рамы и электроника.
Сразу пришла мысль, что можно собрать дрона на базе рамы для FPV Racer'а. Как раз такая была и лежала пока без дела, потому что из-за снега зимой FPV не особо хотелось летать.

Рама вырезана из карбона с небольшими переделками относительно данной рамы. Изменения заключаются в крепежных отверстиях под моторы и форме демпфирующей платформы под камеру Xaiom Yi, вместо Mobius'а. Винты выбраны 6045, так как из характеристик мотора видно, что они наиболее эффективны. Время полета с аккумулятором 3s 2200 мАч составляет 10-11 минут.

Регуляторы двигателей установлены DYS SN20A. Они недорогие и достаточно надежные, тем более для неспешного автоматического управления.
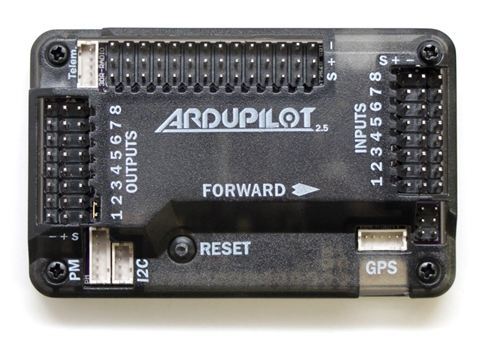
Главный элемент электроники — полетный контролер или автопилот — выбран 3DR APM 2.5. На самом деле он уже устарел, но оказался под рукой. Конечно, если есть возможность, лучше использовать Pixhawk. Прошивка ArduCopter для APM не поддерживается с версии 3.2.1, хотя содержит в себе всё необходимое, чтобы справляться поставленными задачами.
Для повышения качества управления полетного контроллера нужна виброизоляция с рамой (чтобы уменьшить шум на акселерометр и гироскоп), поэтому автопилот установлен на демпфирующую платформу. В моем случае она напечатана на 3d принтере, но можно рассмотреть и другие конструкции. Для измерения высоты используется встроенный в автопилот барометр, а для определения углового положения задействованы акселерометр, гироскоп и магнитометр. Магнитометр лучше использовать внешний, чтобы уменьшить отрицательное воздействие от металлических деталей и силовой электроники на магнитное поле.
Теперь рассмотрим важную часть для автономного полета — это модуль GPS, на котором также присутствует магнитометр. Модуль необходим для позиционирования в горизонтальной плоскости, чтобы осуществлять полеты по заданному маршруту. Модуль вынесен на 12см вверх, чтобы повысить точность измерений магнитометра, вдобавок прием GPS сигналов лучше, если верхняя полусфера антенны, которая тоже находится на модуле, полностью открыта. Я использовал Ublox Neo-M8N. На модуле пришлось выкрутить один из трех железных винтов на корпусе (на фото слева), так как он находился около чипа магнитометра.

Чтобы отправлять команды с земли и принимать телеметрию с коптера необходима радиосвязь. Хорошим выбором являются модемы SiK Telemetry Radio. На коптере установлена версия на 900 МГц. В условиях города такой связи хватает на 500-700 метров без прямой видимости. Благодаря модемам можно отправлять составленную полетную миссию на коптер (об этом ниже), давать команду на взлет или на возвращение домой (если видно, что что-то пошло не так), менять параметры автопилота и многое другое. Также с дрона на землю можно получать информацию о местоположении, высоте, заряде батареи и т. п. Вообщем-то дальность связи не так важна, так как при полетах на большие расстояния коптер передвигается самостоятельно по заранее записанной в нем миссии. Прерывание связи плохо тем, что дрон нельзя в любой момент вернуть домой, а также не понятно, в какой точке на карте искать его в случае падения.
Для подключения модема к смартфону понадобится USB OTG кабель. Удобнее всего использовать модель с двумя угловыми microUSB. Я изготовил его самостоятельно, но можно купить кабель от 3DR. Модем закрепляется на телефон с помощью липучки.

Еще на коптере присутствует модуль питания, который преобразует напряжение батареи (3s, 11.1 В) в напряжение питания управляющей электроники (5 В). Плата питания оснащена датчиком тока и напряжения, чтобы следить за зарядом батареи.

Так как перед автономным полетом коптер необходимо настроить (коэффициенты ПИД-регуляторов и другие параметры автопилота), на первоначальном этапе на дрон был установлен радиоприемник для управления с аппаратуры. Это позволяет вручную управлять коптером для отладки стабильности полета и в случае непредвиденных ситуаций приземлить его.
Для съемки используется камера Xiaomi Yi, так как является наиболее оптимальной по цене и качеству. Она установлена на раму через резиновые демпферы, чтобы уменьшить влияние вибраций на качество видео.

Настройка полетного контроллера и первые полеты.
Так как коптеры, собранные самостоятельно, состоят из уникального набора винто-моторной группы, регуляторов скорости, рамы, аккумулятора и дополнительной нагрузки, а также они могут быть предназначены для различных целей, необходима настройка полетного контроллера определенным образом. Наиболее функциональной оболочкой для конфигурации ArduCopter является MissionPlanner для Windows.
Начнем с ПИД-регуляторов. Стабильный и устойчивый полет обеспечивает подбор коэффициентов составляющих регулятора. Подробнее можно почитать на официальном сайте ArduCopter. Наиболее важными являются контуры управления по крену и тангажу. Проще всего выполнить настройку при помощи пульта, меняя коэффициенты и наблюдая за изменениями в полете. В режиме Stabilize необходимо добиться максимально отзывчивого управления по крену, тангажу и рыску без осцилляций.
Затем переходим к Alt Hold — режиму удержания высоты, при котором задействован барометр. Стоит обратить внимание на параметр INAV_TC_Z. Он был поднят до 6, чтобы избежать потери высоты при начале движения из точки зависания.
Когда с удержанием высоты все в порядке, остается проверить режим полета по GPS — Loiter. Перед началом испытаний необходимо откалибровать компас (магнитометер). Наиболее точно это можно сделать на улице, вдали от металлических конструкций. Калибровка устраняет локальные (находящиеся на коптере) искажения магнитного поля. Затем можно проверить, как дрон ведет себя при полете с GPS позиционированием. Не стоит забывать о количестве спутников и параметре HDOP, если они ниже установленных по умолчанию, то о стабильном полете можно забыть. Запуски допустимо производить на расстоянии от высоких зданий и деревьев, которые могут перекрывать GPS сигналы. Также отрицательное влияние на компас производят железные объекты, которые могут внести искажения в показания и привести к некорректному поведению в полете. Параметры ПИД-регуляторов Loiter можно оставить по умолчанию.
Главной цель — автономный полет. Его представляет режим Auto, и связанные с ним RTL, Guided и Follow Me. Если первые три режима, описанные выше, правильно настроены, то с режимом Auto не должно возникнуть никаких проблем. Говоря о параметрах автоматических режимов, можно обратить внимание на RTL_ALT (высота при возвращении на точку старта), WPNAV_RADIUS (радиус с которым коптер будет срезать углы маршрута), WPNAV_LOIT_SPEED, WPNAV_SPEED_DN, WPNAV_SPEED_UP (горизонтальная и вертикальная скорости), WP_YAW_BEHAVIOR (задает, куда будет «смотреть» коптер при движении по маршруту).
Все параметры можно просмотреть ниже. Замечу, что если собрать такой же по конфигурации коптер, этап настройки можно пропустить, а просто залить существующие параметры в автопилот. Можно даже не использовать пульт и приемник для отладки, но это уже на свой страх и риск.
ACRO_BAL_PITCH,1.00000000
ACRO_BAL_ROLL,1.00000000
ACRO_EXPO,0.30000001
ACRO_RP_P,4.50000000
ACRO_TRAINER,2
ACRO_YAW_P,4.50000000
AHRS_COMP_BETA,0.10000000
AHRS_GPS_GAIN,1.00000000
AHRS_GPS_MINSATS,6
AHRS_GPS_USE,1
AHRS_ORIENTATION,0
AHRS_RP_P,0.10000000
AHRS_TRIM_X,0.00480902
AHRS_TRIM_Y,0.00000000
AHRS_TRIM_Z,0.00000000
AHRS_WIND_MAX,0
AHRS_YAW_P,0.10000000
ANGLE_MAX,4500
ARMING_CHECK,1
ATC_ACCEL_RP_MAX,0.00000000
ATC_ACCEL_Y_MAX,0.00000000
ATC_RATE_FF_ENAB,0
ATC_RATE_RP_MAX,18000.00000000
ATC_RATE_Y_MAX,9000.00000000
ATC_SLEW_YAW,1000.00000000
BAROGLTCH_ACCEL,1500.00000000
BAROGLTCH_DIST,500.00000000
BAROGLTCH_ENABLE,1
BATT_AMP_OFFSET,0.00000000
BATT_AMP_PERVOLT,18.00000000
BATT_CAPACITY,1400
BATT_CURR_PIN,12
BATT_MONITOR,4
BATT_VOLT2_MULT,1.00000000
BATT_VOLT2_PIN,-1
BATT_VOLT_MULT,10.01000023
BATT_VOLT_PIN,13
CAM_DURATION,10
CAM_SERVO_OFF,1100
CAM_SERVO_ON,1300
CAM_TRIGG_DIST,0.00000000
CAM_TRIGG_TYPE,0
CH7_OPT,4
CH8_OPT,0
CIRCLE_RADIUS,1000.00000000
CIRCLE_RATE,20.00000000
COMPASS_AUTODEC,1
COMPASS_DEC,0.00000000
COMPASS_EXTERNAL,0
COMPASS_LEARN,0
COMPASS_MOTCT,0
COMPASS_MOT_X,0.00000000
COMPASS_MOT_Y,0.00000000
COMPASS_MOT_Z,0.00000000
COMPASS_OFS_X,-40.00000000
COMPASS_OFS_Y,-4.00000000
COMPASS_OFS_Z,-27.00000000
COMPASS_ORIENT,8
COMPASS_USE,1
DCM_CHECK_THRESH,0.80000001
EKF_CHECK_THRESH,0.80000001
ESC,0
FENCE_ACTION,1
FENCE_ALT_MAX,100.00000000
FENCE_ENABLE,0
FENCE_MARGIN,2.00000000
FENCE_RADIUS,300.00000000
FENCE_TYPE,3
FLOW_ENABLE,0
FLTMODE1,0
FLTMODE2,0
FLTMODE3,0
FLTMODE4,2
FLTMODE5,0
FLTMODE6,5
FRAME,1
FS_BATT_ENABLE,0
FS_BATT_MAH,0.00000000
FS_BATT_VOLTAGE,10.50000000
FS_GCS_ENABLE,1
FS_GPS_ENABLE,1
FS_THR_ENABLE,0
FS_THR_VALUE,975
GND_ABS_PRESS,99934.92968750
GND_ALT_OFFSET,0
GND_TEMP,20.61724091
GPSGLITCH_ACCEL,1000.00000000
GPSGLITCH_ENABLE,1
GPSGLITCH_RADIUS,200.00000000
GPS_HDOP_GOOD,230
GPS_NAVFILTER,8
GPS_TYPE,1
HLD_LAT_P,1.00000000
INAV_TC_XY,2.50000000
INAV_TC_Z,6.00000000
INS_ACCOFFS_X,0.18518060
INS_ACCOFFS_Y,0.37016189
INS_ACCOFFS_Z,1.30617762
INS_ACCSCAL_X,0.99584502
INS_ACCSCAL_Y,0.99087548
INS_ACCSCAL_Z,0.97209746
INS_GYROFFS_X,-0.01991687
INS_GYROFFS_Y,-0.02309356
INS_GYROFFS_Z,0.01115302
INS_MPU6K_FILTER,0
INS_PRODUCT_ID,0
LAND_REPOSITION,1
LAND_SPEED,50
LOG_BITMASK,894
LOITER_LAT_D,0.00000000
LOITER_LAT_I,0.50000000
LOITER_LAT_IMAX,4
LOITER_LAT_P,1.00000000
LOITER_LON_D,0.00000000
LOITER_LON_I,0.50000000
LOITER_LON_IMAX,1000
LOITER_LON_P,1.00000000
MAG_ENABLE,1
MIS_RESTART,0
MIS_TOTAL,6
MNT_ANGMAX_PAN,4500
MNT_ANGMAX_ROL,4500
MNT_ANGMAX_TIL,4500
MNT_ANGMIN_PAN,-4500
MNT_ANGMIN_ROL,-4500
MNT_ANGMIN_TIL,-4500
MNT_CONTROL_X,0.00000000
MNT_CONTROL_Y,0.00000000
MNT_CONTROL_Z,0.00000000
MNT_JSTICK_SPD,0
MNT_MODE,3
MNT_NEUTRAL_X,0.00000000
MNT_NEUTRAL_Y,0.00000000
MNT_NEUTRAL_Z,0.00000000
MNT_RC_IN_PAN,0
MNT_RC_IN_ROLL,0
MNT_RC_IN_TILT,0
MNT_RETRACT_X,0.00000000
MNT_RETRACT_Y,0.00000000
MNT_RETRACT_Z,0.00000000
MNT_STAB_PAN,0
MNT_STAB_ROLL,0
MNT_STAB_TILT,0
MOT_SPIN_ARMED,70
MOT_TCRV_ENABLE,1
MOT_TCRV_MAXPCT,93
MOT_TCRV_MIDPCT,52
OF_PIT_D,0.12000000
OF_PIT_I,0.50000000
OF_PIT_IMAX,100
OF_PIT_P,2.50000000
OF_RLL_D,0.12000000
OF_RLL_I,0.50000000
OF_RLL_IMAX,100
OF_RLL_P,2.50000000
PHLD_BRAKE_ANGLE,3000
PHLD_BRAKE_RATE,8
PILOT_ACCEL_Z,250
PILOT_VELZ_MAX,250
POSCON_THR_HOVER,193.00000000
RATE_PIT_D,0.00350000
RATE_PIT_I,0.06800000
RATE_PIT_IMAX,1500
RATE_PIT_P,0.06800000
RATE_RLL_D,0.00200000
RATE_RLL_I,0.04200000
RATE_RLL_IMAX,1500
RATE_RLL_P,0.04200000
RATE_YAW_D,0.00000000
RATE_YAW_I,0.02000000
RATE_YAW_IMAX,8
RATE_YAW_P,0.15000001
RC10_DZ,0
RC10_FUNCTION,0
RC10_MAX,1900
RC10_MIN,1100
RC10_REV,1
RC10_TRIM,1500
RC11_DZ,0
RC11_FUNCTION,0
RC11_MAX,1900
RC11_MIN,1100
RC11_REV,1
RC11_TRIM,1500
RC1_DZ,30
RC1_MAX,2020
RC1_MIN,962
RC1_REV,1
RC1_TRIM,1499
RC2_DZ,30
RC2_MAX,2022
RC2_MIN,962
RC2_REV,1
RC2_TRIM,1493
RC3_DZ,30
RC3_MAX,2021
RC3_MIN,958
RC3_REV,1
RC3_TRIM,963
RC4_DZ,40
RC4_MAX,2020
RC4_MIN,962
RC4_REV,1
RC4_TRIM,1493
RC5_DZ,0
RC5_FUNCTION,0
RC5_MAX,2020
RC5_MIN,962
RC5_REV,1
RC5_TRIM,963
RC6_DZ,0
RC6_FUNCTION,0
RC6_MAX,2020
RC6_MIN,959
RC6_REV,1
RC6_TRIM,963
RC7_DZ,0
RC7_FUNCTION,0
RC7_MAX,1500
RC7_MIN,1500
RC7_REV,1
RC7_TRIM,1500
RC8_DZ,0
RC8_FUNCTION,0
RC8_MAX,1501
RC8_MIN,1500
RC8_REV,1
RC8_TRIM,1500
RCMAP_PITCH,2
RCMAP_ROLL,1
RCMAP_THROTTLE,3
RCMAP_YAW,4
RC_FEEL_RP,100
RC_SPEED,490
RELAY_PIN,13
RELAY_PIN2,-1
RNGFND_FUNCTION,0
RNGFND_GAIN,0.80000001
RNGFND_MAX_CM,700
RNGFND_MIN_CM,20
RNGFND_OFFSET,0.00000000
RNGFND_PIN,-1
RNGFND_RMETRIC,1
RNGFND_SCALING,3.00000000
RNGFND_SETTLE_MS,0
RNGFND_STOP_PIN,-1
RNGFND_TYPE,0
RSSI_PIN,-1
RSSI_RANGE,5.00000000
RTL_ALT,0
RTL_ALT_FINAL,-1
RTL_LOIT_TIME,3000
SCHED_DEBUG,0
SERIAL0_BAUD,115
SERIAL1_BAUD,57
SIMPLE,0
SR0_EXTRA1,10
SR0_EXTRA2,10
SR0_EXTRA3,2
SR0_EXT_STAT,2
SR0_PARAMS,10
SR0_POSITION,3
SR0_RAW_CTRL,2
SR0_RAW_SENS,2
SR0_RC_CHAN,2
SR1_EXTRA1,0
SR1_EXTRA2,0
SR1_EXTRA3,0
SR1_EXT_STAT,0
SR1_PARAMS,0
SR1_POSITION,0
SR1_RAW_CTRL,0
SR1_RAW_SENS,0
SR1_RC_CHAN,0
STB_PIT_P,6.59999990
STB_RLL_P,6.59999990
STB_YAW_P,4.50000000
SUPER_SIMPLE,0
SYSID_MYGCS,255
SYSID_SW_MREV,120
SYSID_SW_TYPE,10
SYSID_THISMAV,1
TELEM_DELAY,0
THR_ACCEL_D,0.00000000
THR_ACCEL_I,1.29999995
THR_ACCEL_IMAX,5
THR_ACCEL_P,0.64999998
THR_ALT_P,1.00000000
THR_DZ,100
THR_MAX,1000
THR_MID,420
THR_MIN,130
THR_RATE_P,6.00000000
TRIM_THROTTLE,193
TUNE,0
TUNE_HIGH,1000
TUNE_LOW,0
WPNAV_ACCEL,100.00000000
WPNAV_ACCEL_Z,100.00000000
WPNAV_LOIT_JERK,1000.00000000
WPNAV_LOIT_SPEED,850.00000000
WPNAV_RADIUS,1000.00000000
WPNAV_SPEED,850.00000000
WPNAV_SPEED_DN,200.00000000
WPNAV_SPEED_UP,300.00000000
WP_YAW_BEHAVIOR,1
Автономный полет.
Вначале о приложении, с помощью которого задается маршрут на карте. Это Tower. Вместе с ним придется установить 3DR Services, чтобы подключить модем к Android. Приложение достаточно стабильное и функциональное, можно использовать оффлайн карты или просто прогружать заранее Google Maps. О всех возможностях и навыках использования данного приложения легко узнать из следующего видео.
Стоит отметить, что на начальных этапах лучше не снимать радиоприемник с дрона и иметь пульт под рукой, чтобы перехватить коптер в ручное управление, так как возможны ошибки при запусках через Tower, пока интерфейс программы полностью не изучен.
Первое, на что стоит обратить внимание — это высота полета, задаваемая вручную. Часто сложно со стороны определить высоту, на которой должен пройти коптер, чтобы ничего не задеть. Стоит потренироваться в определении высоты «на глаз». Но все равно это не спасает при полетах на большие расстояния, когда обзор перекрывают ближе стоящие объекты.
Второе — всегда нужно помнить об условиях работы GPS и магнитометра, описанных выше. В связи с этим необходимо тщательно выбирать стартовую площадку. Чтобы проверить компас, можно посмотреть, совпадают ли повороты коптера на земле на 90 или 180 градусов, с показаниями угла курса в Tower. Ошибка не должна превышать 15 градусов.
Третье — безопасность. Взлеты и посадки лучше производить вдали от людей и животных, а также не осуществлять полеты в запрещенных зонах.
Опыт использования аппарата и заключение.

Воплощение идеи небольшого коптера, летающего самостоятельно по маршруту, можно принять состоявшейся. Минимум необходимых вещей, включая пять аккумуляторов и зарядное устройство, занимают совсем немного места в багаже. За 10 минут полета коптер способен улететь на 1.5-2 км и вернуться. Нужно признать достаточную надежность аппарата — никаких сбоев ни разу не произошло. При этом испытания проходили в СПб, когда температура держалась около нуля градусов, а основные полеты были в жару 30-35 градусов. Кстати, можно увидеть видео первых полетов 1, 2, 3 и 4. В общей сложности было отснято около 2х часов видео и совершено 40 вылетов в различных местах.
Конечно, случались и ошибки. Два раза в путешествии коптер врезался в препятствия. Это полностью связано с некорректной установкой высоты полета, так как в первом случае была гористая местность, а во втором не хватило буквально десяти сантиметров. Три раза при посадке наблюдались, так называемые “toiletbowls”, потому что рядом находились большие металлические здания. При этом посадки были не очень удачные, но без поломок. Возможность использования Follow Me режима я не сильно оценил, его стоит дорабатывать. В этом режиме полет неуверенный.
Еще выделю основной недостаток такого коптера — это отсутствие гиростабилизированного подвеса и, как следствие, дерганное видео. Но к сожалению, без потери продолжительности полета, в заданный размер не уместить подвес для Xiaomi Yi.
В целом, проект можно считать удавшимся. Благодаря дрону получены незабываемые кадры путешествия. Хотя стоит признать, что есть над чем поработать и, может быть, создать новую версию.
Комментарии (42)

AkaA1exander
07.06.2016 16:42+1видео дергается. А так все норм!

tuuzdu
07.06.2016 16:42+1без подвеса, к сожалению, только так…
sviterov
07.06.2016 17:58-1Думайте над стабилизацией. Видео очень несмотрибельно из-за тряски
tuuzdu
07.06.2016 18:01+2В данной версии — главное простота. Подвес усложняет изделие на порядок.
Можно применить программную стабилизацию, но опять же это усложняет монтаж видео. Здесь результат, который достигается достаточно просто.sviterov
07.06.2016 18:04Есть ли смысл делать аппарат для съёмки, который очень плохо снимает?
tuuzdu
07.06.2016 18:25+2Плохо относительно чего? Я не знаю ничего похожего с чем можно сравнить.
Простой и дешевый аппарат, который можно собрать самому и который летает самостоятельно, естественно снимает не как топовые готовые коптеры.

Houston
07.06.2016 20:36+1Один парень, кстати, смог = )
https://oscarliang.com/mini-quad-camera-gimbal-feiyu-mini3d/



madf
07.06.2016 19:19видео можно было стабилизировать в премьере, процесс да не быстрый и съедает разрешение картинки, но оно того стоит, хотя если снимать в 4К — норм получается
tuuzdu
07.06.2016 19:23при таком разрешении после стабилизации в премьере видны искажения картинки.
а ReelSteady требует владения After Effects. там не так просто, как с warp стабилизациейmadf
08.06.2016 10:55в демо ролике ReelSteady тоже картинка не плавная и вся дергается)
кстати в примьере проблем таких не замечал, дефолтовый стаб работает отлично
Yogo
07.06.2016 19:23Подскажите, нельзя ли вместо готовой экшн-камеры купить модуль камеры на том же али, должно выйти дешевле/лечге?
ELP-USBFHD01M-L21, например: tinyurl.com/jqneobetuuzdu
07.06.2016 19:24Можно, но тогда придется ставить дополнительное устройство, которое будет записывать поток с USB камеры )
rfvnhy
07.06.2016 20:04При таком автономном полете не 0й риск кого нибудь покрошить лопастями…
Подумают что вы им управляете, а он сам летит…
Вот и выйдет очередной запрет на полеты…tuuzdu
07.06.2016 22:19Вообще любой коптер может отказать и упасть…
Согласен, что у этого вероятность больше, так как останется только наблюдать за ним в случае непредвиденной ситуации. Но и если в ручках управлять, то нужно иметь достаточный навык, чтобы самому такие ситуации не создавать.
Плюсом является то, что коптер имеет небольшую массу и лопасти, и теоретически может нанести меньше повреждений.
Полностью согласен, что полеты лучше производить вдали от людей.Yogo
08.06.2016 10:38Можно запилить аварийную кнопку, с радиопередатчиком, чтобы коптер, по команде, совершал немедленную посадку.

Anisotropic
07.06.2016 21:31Самосбор нормально пускают в азиатские страны, на таможнях не прикапываются?
tuuzdu
07.06.2016 22:22Ни единого вопроса никто не задал. Перед самолетами снимал антенны и лопасти. Батареи были в lipo safe пакете.

danluck
07.06.2016 22:24Я собрал 450 квадрокоптер на контроллере APM 2.6 и никак не могу заставить его корректно летать по точкам. Каждый полет он не долетает обратно (обычно на расстоянии более 200 м от точки взлета) и сам переходит в режим Land в рандомной точке, а это чревато большими проблемами. В крайний раз пришлось лезть на 15-ти метровую сосну.
Вот пример:
youtu.be/hqXSvC4UPy8?t=1m29s
на 1:40 включился режим Land, хотя в миссии оставалось еще 2 точки.
Аккумулятор заведомо заряженный, хватает до 10 минут полета.
Проверял в настройках дальность улета — отключена.
Failsafe настроен в режиме Continue in Auto.
Если точки задавать в пределах 100 м, то отрабатывает миссия хорошо.
Не сталкивались ли Вы с подобным поведением? Посоветуйте, что еще проверить.tuuzdu
07.06.2016 22:37Вообще фаилсэйфов в APM несколько.
В Вашем случае это может быть failsafe по GPS. Посмотрите параметр FS_EKF_ACTION
Еще возможно защита по газу FS_THR_ENABLE

ra3vld
09.06.2016 13:56«А вы пробовали выключить и включить?»
Пару раз на апме ловил, когда помогал только сброс к заводским установкам (либо копал не там).
Так же стоит посмотреть как отрабатывает фэйлсэйв на пульте (б.м. при потере связи он переводит контроллер в режим посадки).
Ну и фэйлсэйв по гпс, тоже очень вероятен.
Genoik
07.06.2016 23:08-1Заранее прощу прощения, если обижу, но все же выскажу свое мнение.
Никогда не понимал статьи из разряда:«Заказал на Aliexpress детали, собрал их вместе, запилил статью на Гигтаймс».
Вашей какой-либо разработки в данном случае нет. Вы просто купили готовые детали, готовый контроллер, взяли готовую программу и рассказали всем об этом. Получился этакий вариант ЖЖ.
В принципе неплохо, если бы не одно но. Во-первых, летать по автоматического маршруту где бы то ни было, кроме как в поле, я бы очень не советовал. Любой сбой сигнала ЖПС и могут быть жертвы. Во-вторых, взять хотя бы первоначальную настройку тех же ПИД-регуляторов.
Процитирую вас: «В режиме Stabilize необходимо добиться максимально отзывчивого управления по крену, тангажу и рыску без осцилляций». Человеку, который с этим никогда не связывался, мне кажется очень трудно будет понять, что такое «максимально отзывчивое управление». Если хотите что-то типа обучающей статьи, то неплохо бы приводить примеры «максимально отзывчивого управления» и «не максимально отзывчивого», чтобы хотя бы было понятно, с чем сравнивать.
Или, например, читаем дальше: «Перед началом испытаний необходимо откалибровать компас (магнитометер). Наиболее точно это можно сделать на улице, вдали от металлических конструкций. » Кому из этой фразы будет понятно, как именно это сделать? Вы знаете как правильно откалибровать компас? Как перевести контроллер в режим калибровки? Как после этого держать коптер? Нужно ли его переворачивать во всех плоскостях или не нужно?
Я понимаю. что вы потратили свое личное время на написание статьи, хотели чем-то поделиться, но таких статей уже на Гигтаймсе куча. Новичкам будет многое непонятно, потому что нет раскрытия ньюансов, а для тех, кто в теме, тут тоже ничего нового нет.
P.S. Прошу не воспринимать критику как личные нападки, просто хочется более качественного контента на ресурсе.
EugeneButrik
08.06.2016 00:43… просто хочется более качественного контента на ресурсе.
Да ладно вам. В свете последних трендов, демонстрируемых, в том числе и «уважаемыми редакторами» Гиктаймс, и касающихся публикации откровенной желтизны и откровенной же политоты, этот топик, можно сказать, прям как бальзам на душу.
P.S. Но «Singapure» в видео на 1:28 я бы всё-таки поправил. :)tuuzdu
08.06.2016 09:12Вы первый человек, который заметил и сказал об этой ошибке) Признаюсь, было лень рендерить заново)

dron_k
08.06.2016 01:23«вы просто взяли готовые микросхемы и соединили их между собой»
«вы просто взяли готовые программные модули и соединили их между собой»
Ну, такое время сейчас…
tuuzdu
08.06.2016 09:11Статья написана для более-менее технически подготовленных людей. Целью не было «разжевывание» каждой детали. Вся необходимая информация находится на официальном сайте ArduCopter.
Genoik
08.06.2016 12:21«Статья написана для более-менее технически подготовленных людей»
Какую информацию она для них несет?
«Вся необходимая информация находится на официальном сайте ArduCopter.»
На английском языке. Ну тогда зачем ваша статья?
Вы даете ссылки на англоязычный ресурс. Можно те же вещи написать было по-русски, раз уж вы делитесь своим опытом на русскоязычном ресурсе.
Например, возьмем калибровку компаса. Вы знаете, можно ли ее произвести без подключения к ПК, а с помощью комбинации стиков пульта управления? Или обязательно нужно подключение к ПК, как показано в видео?
Нужно ли вводить магнитное склонение для своего региона?
Да, все эти вопросы можно найти, если знать что искать. В том числе и на русскоязычных форумах. Но опять же, надо знать, что искать.
Я не в плане критики, просто искренне не понимаю для кого пишутся такого типа статьи, коих на ресурсе уже с десяток.tuuzdu
08.06.2016 13:39Я не вижу смысла мне объяснять такие подробности.
Статьей я показал возможность создания такого аппарата, только и всего.
А где эти статьи про небольшие автономные коптеры, управляемые со смартфона?Genoik
08.06.2016 15:02Если под управлением вы подразумеваете составление маршрута, то его можно сделать в том же MissionPlaner. Даже название говорит само за себя.
И конкретно статей про составление маршрута для коптера (любого, размер тут не причем), с использованием смартфона или планшета на Android я при первом поиске на ресурсе не нашел.
Если статья об этом, тогда вы первопроходец!

youree
08.06.2016 04:01Пролёт между шпилями в Бангкоке — тоже ошибочный подбор высоты или так было задумано? Насколько узкий форватер он, вообще, может держать?
tuuzdu
08.06.2016 09:16Все зависит от GPS, но на высоте всегда набирается порядочное количество спутников (15-20) и hdop составляет 1.2-1.4.
Ошибка позиционирования еще зависит от ветра, но обычно это 1-3 метра, при ветре до 5м/с.
Cooler044
09.06.2016 19:31В прошлом году собирал себе гонку на раме ZMR250, но в виду отсутствия гоночной компании и желания покупать дорогие очки (по монитору летать совсем не айс) гонку пересадил на MiniAPM 3.1. Так и летаю до сих пор в удовольствие, пока что рекорд дальности около 2 км, высоты 400м. Мне очень нравится, весь набор влазит в рюкзак. Самый тяжелый квест был, конечно, настроить PIDы. Когда собирал, таких проектов в интернете было очень мало, пришлось всё делать самому и отталкиваться от стока. Теперь же в гугле довольно много примеров пидов и прочего для таких затей…
Очень расстраивают «гонщики», которые видя на чём то меньше 300го размера стойку GPS сразу же начинают жестко критиковать «нецелевое использование» «гоночной» рамы. Стоит мне где то выложить фото, или упомянуть АПМ на ЗМРке, начинается шквал критики. Обидно за гоночное комьюнити.
IronHead
А видосики с полетов? Я до конца ради них читал (
tuuzdu
Так в самом начале!) А в конце — по ссылкам в инстаграм.