
В обычное время механизатор зарабатывает около 30 тысяч рублей в месяц. Но всё резко меняется во время уборки урожая, когда механизатор на время становится оператором комбайна — комбайнёром, за этот промежуток он получит до 150 тысяч рублей. Есть буквально две недели, когда нужно собрать всё, во что вы целый год вкладывали огромное количество денег за работу, удобрения, солярку и так далее. Работать можно примерно с восьми утра (настроить машину, в девять начать) до темноты, потому что роса и ночная влажность резко ухудшают качество зерна. На износ. И на третий-четвёртый день начинаются проблемы с авариями или перемалыванием не того и не так.
Со стороны кажется, что задача — проехать на комбайне по полю «змейкой» и «перемолоть» всю пшеницу или другую культуру. На деле всё далеко не так. Оператор должен следить за сотнями вещей и при этом постоянно смотреть на кромку поля, чтобы двигаться ровно. Представьте себе, что вы едете 12–14 часов по трассе на скорости 120 км/час за человеком, который раз в полчаса неожиданно тормозит. Примерно то же чувствует оператор: работа невероятно монотонная, но при этом постоянно нужно быть готовым к сюрпризу.

Сюрприз может выглядеть так. Пока мы ездили «в поля», не видели ни одного целого комбайна без следов сварки.
Фактически комбайнёр следит за процессом обработки зерна (одно рабочее место) и при этом ведёт технику (другое рабочее место). Но только это один человек. Следствие — страдает что-то одно. Поскольку, если плохо вести, можно случайно перемолоть камень или человека на поле, и страдает обычно качество уборки зерна.
Часть работы легко автоматизируется. Сейчас расскажу, что именно мы сделали и как мы модифицируем даже довольно старые комбайны своими роботами.
Итак, две недели оператор комбайна работает на износ. Оплата у него состоит из оклада (тех самых 30 тысяч в регионе) и премии за объём полученного зерна (что позволяет получить до 150 тысяч рублей в регионе). При этом агроном смотрит на равномерность покрытия поля — если в процессе останутся «петухи» (то есть непрокошенные участки из-за неровного поворота), на их сбор нужно будет потратить много лишних ресурсов: это ГСМ, амортизация, прогон транспорта, время. Как правило, такие участки «дорабатываются» утром, и КПД работы комбайна там очень низкий. А от снижения себестоимости уборки очень сильно зависит весь бизнес-эффект хозяйства: на рынок они повлиять не могут, но могут уменьшить стоимость зерна для себя. Поэтому есть следствия:
По статистике механизатор из-за усталости к концу смены оставляет вне захвата до одного метра от длины жатки. При скорости движения комбайна в 10 км/ч и уменьшении захвата на один метр за четыре часа он «недоуберёт» четыре га. Кроме потери времени на уборку, увеличивается расход ГСМ. При уровне расхода топлива 20 л/га прямая потеря в топливе (которое потребуется для уборки упущенных площадей) составит: 4 га х 20 л х 45 руб./л = 3 600 руб./за смену. На уборку оставшегося участка в следующую смену уйдёт дополнительно три часа работы. За четыре дня механизатор увеличивает продолжительность своей работы на один день. За сезон время уборки урожая увеличивается из-за ошибки механизатора на 25 %.
За 20 дней потеря на топливе составит 20 х 3 600 руб. = 72 000 рублей, парк из 10 машин теряет за это время на ГСМ 720 000 рублей.
Вот видео, где мы показываем хозяйству, как работает робот. Оператор комбайна снимает на видео действия машины. Это реакция человека, внезапно столкнувшегося с будущим:
Ещё одна важная вещь — механизаторы часто приезжают вахтовым методом. Владелец поля или агроном их не знает, не знает, где работали, как работали. Он понимает, что они будут гоняться по полям за максимальным бонусом. Ему нужна эта система, чтобы обезопасить свою технику.
В среднем хозяйстве, по нашей статистике, происходит одно-два серьёзных столкновения в год. На поле работает не один комбайн, а несколько. По дороге комбайнёру могут встретиться другой комбайн, трактор, дерево, неожиданно вышедший на поле столб ЛЭП, человек (в том числе другой комбайнёр, отошедший в туалет), корова и другие препятствия.
Я знаю случай, когда оператор наблюдал за кромкой, а потом внезапно увидел, что из комбайна начинает лететь что-то красное. На поле лежал человек, его подхватило в жатку и начало перерабатывать. Механизатора оправдали: следствие выяснило, что это вроде бы местная братва бросила труп на поле. Но он уехал в психиатрический стационар. Вот ещё пара случаев: подъехал дозаправиться, сбил водителя, а это загадочный «Адам».
Понятно, что, когда что-то прячется в культуре, почти невозможно предотвратить столкновение с этим. Поэтому, кстати, на полях нет больших камней: их убирают ещё до посева (а маленькие попадают в камнеуловители комбайна). Оператор сидит довольно высоко, и большинство препятствий видно заранее. Вопрос в том, куда он смотрит (вбок на кромку, на пульт или вперёд) и насколько хорошая реакция.
По моим данным, чаще всего повреждаются выгрызные хоботы и бьются жатки. Одна из частых причин — при движении группой (например, клином) неравномерная скорость впереди идущего комбайна.
Наш робот позволяет держать расстояние перед впереди идущим.
«Когнитивный пилот» пользуется видеокамерой, смотрящей из кабины чуть выше места оператора, и распознаёт препятствия. Робот знает, что столбы и деревья стоят на месте, но рассчитывает векторы движения людей, коров и тракторов. Когда ситуация становится просто требующей внимания, происходит уведомление. При критических обстоятельствах комбайн резко остановится.
Это означает, что мы экономим несколько дней ремонта во время сбора урожая. То есть ремонт в такое время — это не только стоимость частей и работы, но и огромные потери зерна.

Чем может управлять оператор? Первое — скорость вращения мотовило (это устройство вроде шнека, которое поджимает колосья под срезной аппарат). Скорость непосредственно зависит от типа культуры (под кукурузу — одна, под пшеницу — другая) и от зрелости культуры.

Особенность труда комбайнёра в том, что это сложноалгоритмизируемая задача со множеством чисто опытных предположений. С другой стороны, в самом комбайне пишется почти полный лог действий, и можно установить процент потерь зерна из-за неверных режимов. Не хватает входных данных: влажности, типа культуры, её конкретного сорта, региона (культура по виду и размеру очень сильно отличается от почвы и климата), степени зрелости. Если соединить всё это, то можно получить либо натренированную за 20 лет опыта нейросеть в голове мастерски работающего оператора, либо же робота, который будет делать то же самое за него.
Мастерски работающие операторы сейчас умирают. Почти все эффективные механизаторы обучались при СССР, после чего технологические секреты этой цивилизации были утеряны. Конкретно ослабло обучение, и приходящие «молодые», естественно, работают хуже. Это нормально почти для всех рабочих профессий, но конкретно здесь наш робот как нельзя больше востребован и из-за этого эффекта тоже.
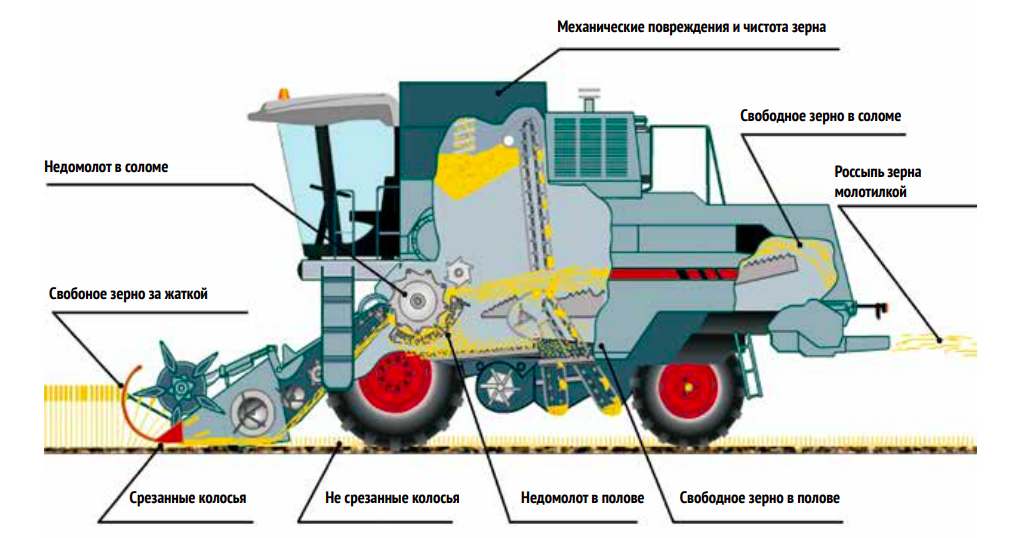
Итак, если скорость вращения будет выше оптимальной для данной ситуации — начнётся вышибание зерновых жаткой, когда ещё до попадания в основную обработку зерно начнёт сыпаться на землю под комбайн. Это от трёх до десяти процентов потерь за неверно выбранный режим. Если скорость дать меньше — колосья будут загибаться не до конца, и падать они начнут на землю, а не в жатку. Тот же результат.
Если зерно не до конца дозрело — уже крупное, но ещё плотно в колосе, — колос с ним легко можно считать единым объектом. А вот если оно чуть перезрелое, то по колосу достаточно легко стукнуть, и он начнёт осыпаться. На одном поле под разные проходы надо менять настройки: бывает, что немного полеглая масса или неполеглая. Где-то кусочек поля на возвышенности, а другой конец — в низине. В низине больше влаги, и там стеблестой более высокий.
Нужно держать кромку, постоянно менять скорость движения комбайна в зависимости от особенностей участка (на полеглом зерне — до одного-двух километров в час, на обычной культуре — в среднем шесть–восемь километров в час), постоянно настраивать скорость вращения мотовила.
А механизатор получает за объём.
Механизаторов на поле много. А количество культуры — ограниченное. Поэтому они, естественно, хотят заработать больше. У них нет задачи сэкономить для хозяйства, у них есть задача собрать лично как можно больше зерна. Поэтому вместо того, чтобы двигаться с нужной скоростью и подбирать все десятки параметров, достаточно двигаться так, чтобы агроном не выгнал из хозяйства на следующий урожай. То есть с максимально возможной скоростью до того, как он начнёт крушить и материться.
На практике это означает, что КПД сбора зерновых далеко не оптимальный. Старые мастера в начале смены показывают отличные показатели, но сохранить их до конца смены тяжело. «Молодые» сосредотачиваются на движении и работают с низким КПД, стараясь набрать больше зерна за смену. Уборочная прошла, первый дождик — зелёные полосы стоят. Это кто-то посеял зерно. Это потери.
Следующий тип настроек — это то, что происходит внутри комбайна. Колосья на транспортёре от жатки попадают в сепарирующий аппарат. Он может отличаться по конструкции, но в общем случае там два барабана, под которыми находятся сита. Барабаны работают на выбивание зерна из колосьев с помощью молотков. Просто стучат по массе, и зерно высыпается в сито.
Очень важно отрегулировать подбарабанье по объёму массы (то есть разные режимы для разных скоростей или разные скорости движения для разных участков поля: это зависит от плотности колосьев, от размера и плотности зерна, от относительной крупности зерна и от лёгкости его выбивания из колоса, то есть зрелости и влажности). Незрелое зерно надо бить сильнее, зрелое особо стучать не надо.
По факту это означает, что перед каждым отличающимся участком поля нужно перенастраивать эти параметры. Моя практика показывает, что этого не делает никто, потому что боится лезть в настройки или просто не хочет с ними разбираться. На современных комбайнах стоят системы датчиков, которые показывают на мониторе процесс. На старых такого нет. Уже прошли времена, когда надо было крутить что-то физическое, чтобы поменять режимы работы механизма. Сейчас можно регулировать всё в любой момент. Но мой примерно 12-летний опыт продаж показывает, что после продажи комбайна приезжает дилер, настраивает основные характеристики и пишет их в бумажку. Примерно из 200 комбайнов, в списании которых я участвовал, я видел ровно три с параметрами, которые отличались от этой бумажки дилера.
То есть здесь просто идут потери оттого, что этой частью работы обычно жертвуют, чтобы не растрачивать внимания. Я видел, как при уведомлениях «меньше скорость, потери», «недомолот, уменьши подбарабанье» игнорируют алерты. «Деды так работали — на фига туда лезть? Если что-то пойдёт не так, простою же весь сезон». В итоге концентрируются на вождении.
Дальше идёт доочистка зерна. Есть роторные и клавишные механизмы, клавишных на рынке намного больше. Солома протягивается через клавишный механизм, внизу — тоже сепаратор. Доочистка и довыбивание зерна заканчиваются тем, что вся масса попадает в ветра (или аналогичный механизм), когда поток воздуха сдувает всё лёгкое (мелкие куски соломы, куски листьев) в сторону, а зерно падает в бункер. Ветра нужно контролировать жёстко, но, к счастью, можно выставить их перед сменой утром. Рапс — нужен минимальный поток воздуха: семечка очень лёгкая. Кукуруза — максимальный поток.
Опять же на практике это выглядит так: приходит 64-летний Михаил Кузьмич, берёт колос, растирает зерно в руках, потом настраивает ветра себе на участок. Остальные механизаторы подходят, смотрят, копируют настройки.

Очень частая картина.
Уборка может идти либо со сбросом зерна во что-то, что едет рядом с комбайном по уже прокошенному участку, либо нужно время от времени вызывать трактор для выгрузки собранной культуры.
Если речь идёт про движение рядом, то нужно следить, чтобы поток зерна попадал в транспорт. Это значит, что надо напряжённо смотреть теперь в две стороны: на пульт и вперёд.
Если речь идёт про вызов — надо следить за заполнением бункера и думать, как транспорт будет подъезжать, то есть решать стратегическую задачу оптимизации его вызова. Как мы знаем, люди обычно решают стратегические задачи с помощью неидеальных жадных алгоритмов, поэтому здесь тоже случаются потери топлива. К счастью, это наименьшая из проблем на поле, поэтому эту часть мы пока не трогаем.
Гораздо интереснее ситуация становится, когда комбайны двигаются не загонками (по своим участкам), а клином. То есть вместе. Здесь нужно следить за ведущим и другими комбайнами в дополнение.
Одна из самых нагруженных частей работы — следить за траекторией движения. То есть рулить.
Прошлое поколение автоматизации решало задачу ведения с помощью GPS-устройств. Вот пример того, как это плохо и достаточно регулярно заканчивается. Напомню, нужна точность 20 сантиметров. В России с ними проблема: если нет активной поправки через Интернет, то нужна наземная станция на 15 км радиусом. Наземная станция стоит денег, и, более того, нужно покупать пакеты сигналов, чтобы она работала, то есть подписку. GPS-комбайны очень «косые» — да, они могут убрать идеальное поле сами, но плохо делают повороты и не следят за ситуацией. При искажениях сигнала оставляют «петухов».
Мы сначала думали про GPS + видеоаналитику, но очень быстро выяснилось, что достаточно только видеоаналитики.
Сейчас комбайн умеет двигаться по плану в загонке, умеет распознавать препятствия и тормозить перед ними, умеет согласовывать движение с транспортом для зерна и другими машинами в клине.
GPS требует долгого программирования карты по навигационным точкам. Это сложный интерфейс, а сложные интерфейсы в поле не работают. Мы сделали куда проще: автопилот видит: «Ого, поле!» — и предлагает передать ему управление. Всё.
Оператор может следить за жаткой и особенностями культуры. Робот рулит.
Режимы:
 По кромке скошенной культуры или обработанной земли, по рядку (кукуруза, подсолнечник), по валку (раздельная уборка) + объезд стационарных препятствий, остановка при угрозе столкновения с другой техникой или людьми, определение участков полегшей культуры и предупреждение или остановка перед ними.
По кромке скошенной культуры или обработанной земли, по рядку (кукуруза, подсолнечник), по валку (раздельная уборка) + объезд стационарных препятствий, остановка при угрозе столкновения с другой техникой или людьми, определение участков полегшей культуры и предупреждение или остановка перед ними.
Кроме комбайна, ещё возможно установить ко-пилота на трактор, косилку или опрыскиватель.
Теперь вы примерно представляете, что нужно, чтобы к вам на стол попали хлеб, кукуруза, макароны, гречка и где там можно накосячить. Я пока на этом остановлюсь, потому что много лет работал в сельском хозяйстве с техникой, а не в разработке и не с нейросетями, но в следующем посте мой коллега из разработки расскажет, как именно всё это работает и в чём конкретно были сложности всё это сделать за два года. А они были, уж поверьте.
Общий экономический эффект — снижение себестоимости зерна на 2,5–5 %. Увы, это аналитика, а не АБ-тест (его сложно провести из-за того, что все участки разные, механизаторы — тоже, и это только второй год работы), но, если интересно, могу рассказать, как мы его рассчитывали.
P.S. Если вашего агронома нет на Хабре, а ему это интересно, можно вот тут вот найти контакты: promo.cognitivepilot.com и предметно обсудить, для какого комбайна, какой конкретно набор техники нужен, сколько примерно стоит, и как это можно быстро посмотреть-испытать.
Со стороны кажется, что задача — проехать на комбайне по полю «змейкой» и «перемолоть» всю пшеницу или другую культуру. На деле всё далеко не так. Оператор должен следить за сотнями вещей и при этом постоянно смотреть на кромку поля, чтобы двигаться ровно. Представьте себе, что вы едете 12–14 часов по трассе на скорости 120 км/час за человеком, который раз в полчаса неожиданно тормозит. Примерно то же чувствует оператор: работа невероятно монотонная, но при этом постоянно нужно быть готовым к сюрпризу.
Сюрприз может выглядеть так. Пока мы ездили «в поля», не видели ни одного целого комбайна без следов сварки.
Фактически комбайнёр следит за процессом обработки зерна (одно рабочее место) и при этом ведёт технику (другое рабочее место). Но только это один человек. Следствие — страдает что-то одно. Поскольку, если плохо вести, можно случайно перемолоть камень или человека на поле, и страдает обычно качество уборки зерна.
Часть работы легко автоматизируется. Сейчас расскажу, что именно мы сделали и как мы модифицируем даже довольно старые комбайны своими роботами.
Повороты
Итак, две недели оператор комбайна работает на износ. Оплата у него состоит из оклада (тех самых 30 тысяч в регионе) и премии за объём полученного зерна (что позволяет получить до 150 тысяч рублей в регионе). При этом агроном смотрит на равномерность покрытия поля — если в процессе останутся «петухи» (то есть непрокошенные участки из-за неровного поворота), на их сбор нужно будет потратить много лишних ресурсов: это ГСМ, амортизация, прогон транспорта, время. Как правило, такие участки «дорабатываются» утром, и КПД работы комбайна там очень низкий. А от снижения себестоимости уборки очень сильно зависит весь бизнес-эффект хозяйства: на рынок они повлиять не могут, но могут уменьшить стоимость зерна для себя. Поэтому есть следствия:
- Поле покрывается маршрутами комбайнов так, чтобы обеспечить непрерывное движение для полного заполнения.
- Самый ответственный момент — повороты с огромной жаткой на девять метров в обе стороны. Дальше надо будет ехать вдоль кромки с трудом. Ближайшая аналогия такая: это как ехать левыми колесами машины по разметке дорожной. Можно это делать хорошо полчаса, но за весь день — точно заедем на встречку. А если заехали на встречку — оставили непрокошенный кусок. Поэтому механизаторы сознательно едут, сохраняя расстояние между краем жатки и кромкой поля. А непрокошенный участок — это ещё соляра, ещё износ, ещё прогон трактора, и самое главное — ещё время. В итоге с утра — непрокошенные участки 30–50 сантиметров, а к вечеру — около метра. Вся эта культура потом не собирается с большими потерями денег.
- Поэтому важно двигаться очень ровно. Мы сейчас отлично двигаемся по кромке (самая долгая и неприятная часть вождения, которая автоматизирует 90 % времени) и испытываем повороты.
По статистике механизатор из-за усталости к концу смены оставляет вне захвата до одного метра от длины жатки. При скорости движения комбайна в 10 км/ч и уменьшении захвата на один метр за четыре часа он «недоуберёт» четыре га. Кроме потери времени на уборку, увеличивается расход ГСМ. При уровне расхода топлива 20 л/га прямая потеря в топливе (которое потребуется для уборки упущенных площадей) составит: 4 га х 20 л х 45 руб./л = 3 600 руб./за смену. На уборку оставшегося участка в следующую смену уйдёт дополнительно три часа работы. За четыре дня механизатор увеличивает продолжительность своей работы на один день. За сезон время уборки урожая увеличивается из-за ошибки механизатора на 25 %.
За 20 дней потеря на топливе составит 20 х 3 600 руб. = 72 000 рублей, парк из 10 машин теряет за это время на ГСМ 720 000 рублей.
Вот видео, где мы показываем хозяйству, как работает робот. Оператор комбайна снимает на видео действия машины. Это реакция человека, внезапно столкнувшегося с будущим:
Ещё одна важная вещь — механизаторы часто приезжают вахтовым методом. Владелец поля или агроном их не знает, не знает, где работали, как работали. Он понимает, что они будут гоняться по полям за максимальным бонусом. Ему нужна эта система, чтобы обезопасить свою технику.
Столкновения
В среднем хозяйстве, по нашей статистике, происходит одно-два серьёзных столкновения в год. На поле работает не один комбайн, а несколько. По дороге комбайнёру могут встретиться другой комбайн, трактор, дерево, неожиданно вышедший на поле столб ЛЭП, человек (в том числе другой комбайнёр, отошедший в туалет), корова и другие препятствия.
Я знаю случай, когда оператор наблюдал за кромкой, а потом внезапно увидел, что из комбайна начинает лететь что-то красное. На поле лежал человек, его подхватило в жатку и начало перерабатывать. Механизатора оправдали: следствие выяснило, что это вроде бы местная братва бросила труп на поле. Но он уехал в психиатрический стационар. Вот ещё пара случаев: подъехал дозаправиться, сбил водителя, а это загадочный «Адам».
Понятно, что, когда что-то прячется в культуре, почти невозможно предотвратить столкновение с этим. Поэтому, кстати, на полях нет больших камней: их убирают ещё до посева (а маленькие попадают в камнеуловители комбайна). Оператор сидит довольно высоко, и большинство препятствий видно заранее. Вопрос в том, куда он смотрит (вбок на кромку, на пульт или вперёд) и насколько хорошая реакция.
По моим данным, чаще всего повреждаются выгрызные хоботы и бьются жатки. Одна из частых причин — при движении группой (например, клином) неравномерная скорость впереди идущего комбайна.
Наш робот позволяет держать расстояние перед впереди идущим.
«Когнитивный пилот» пользуется видеокамерой, смотрящей из кабины чуть выше места оператора, и распознаёт препятствия. Робот знает, что столбы и деревья стоят на месте, но рассчитывает векторы движения людей, коров и тракторов. Когда ситуация становится просто требующей внимания, происходит уведомление. При критических обстоятельствах комбайн резко остановится.
Это означает, что мы экономим несколько дней ремонта во время сбора урожая. То есть ремонт в такое время — это не только стоимость частей и работы, но и огромные потери зерна.
Скорость движения и другие настройки
Чем может управлять оператор? Первое — скорость вращения мотовило (это устройство вроде шнека, которое поджимает колосья под срезной аппарат). Скорость непосредственно зависит от типа культуры (под кукурузу — одна, под пшеницу — другая) и от зрелости культуры.
Особенность труда комбайнёра в том, что это сложноалгоритмизируемая задача со множеством чисто опытных предположений. С другой стороны, в самом комбайне пишется почти полный лог действий, и можно установить процент потерь зерна из-за неверных режимов. Не хватает входных данных: влажности, типа культуры, её конкретного сорта, региона (культура по виду и размеру очень сильно отличается от почвы и климата), степени зрелости. Если соединить всё это, то можно получить либо натренированную за 20 лет опыта нейросеть в голове мастерски работающего оператора, либо же робота, который будет делать то же самое за него.
Мастерски работающие операторы сейчас умирают. Почти все эффективные механизаторы обучались при СССР, после чего технологические секреты этой цивилизации были утеряны. Конкретно ослабло обучение, и приходящие «молодые», естественно, работают хуже. Это нормально почти для всех рабочих профессий, но конкретно здесь наш робот как нельзя больше востребован и из-за этого эффекта тоже.
Итак, если скорость вращения будет выше оптимальной для данной ситуации — начнётся вышибание зерновых жаткой, когда ещё до попадания в основную обработку зерно начнёт сыпаться на землю под комбайн. Это от трёх до десяти процентов потерь за неверно выбранный режим. Если скорость дать меньше — колосья будут загибаться не до конца, и падать они начнут на землю, а не в жатку. Тот же результат.
Если зерно не до конца дозрело — уже крупное, но ещё плотно в колосе, — колос с ним легко можно считать единым объектом. А вот если оно чуть перезрелое, то по колосу достаточно легко стукнуть, и он начнёт осыпаться. На одном поле под разные проходы надо менять настройки: бывает, что немного полеглая масса или неполеглая. Где-то кусочек поля на возвышенности, а другой конец — в низине. В низине больше влаги, и там стеблестой более высокий.
Нужно держать кромку, постоянно менять скорость движения комбайна в зависимости от особенностей участка (на полеглом зерне — до одного-двух километров в час, на обычной культуре — в среднем шесть–восемь километров в час), постоянно настраивать скорость вращения мотовила.
А механизатор получает за объём.
Механизаторов на поле много. А количество культуры — ограниченное. Поэтому они, естественно, хотят заработать больше. У них нет задачи сэкономить для хозяйства, у них есть задача собрать лично как можно больше зерна. Поэтому вместо того, чтобы двигаться с нужной скоростью и подбирать все десятки параметров, достаточно двигаться так, чтобы агроном не выгнал из хозяйства на следующий урожай. То есть с максимально возможной скоростью до того, как он начнёт крушить и материться.
На практике это означает, что КПД сбора зерновых далеко не оптимальный. Старые мастера в начале смены показывают отличные показатели, но сохранить их до конца смены тяжело. «Молодые» сосредотачиваются на движении и работают с низким КПД, стараясь набрать больше зерна за смену. Уборочная прошла, первый дождик — зелёные полосы стоят. Это кто-то посеял зерно. Это потери.
Обработка колосьев
Следующий тип настроек — это то, что происходит внутри комбайна. Колосья на транспортёре от жатки попадают в сепарирующий аппарат. Он может отличаться по конструкции, но в общем случае там два барабана, под которыми находятся сита. Барабаны работают на выбивание зерна из колосьев с помощью молотков. Просто стучат по массе, и зерно высыпается в сито.
Очень важно отрегулировать подбарабанье по объёму массы (то есть разные режимы для разных скоростей или разные скорости движения для разных участков поля: это зависит от плотности колосьев, от размера и плотности зерна, от относительной крупности зерна и от лёгкости его выбивания из колоса, то есть зрелости и влажности). Незрелое зерно надо бить сильнее, зрелое особо стучать не надо.
По факту это означает, что перед каждым отличающимся участком поля нужно перенастраивать эти параметры. Моя практика показывает, что этого не делает никто, потому что боится лезть в настройки или просто не хочет с ними разбираться. На современных комбайнах стоят системы датчиков, которые показывают на мониторе процесс. На старых такого нет. Уже прошли времена, когда надо было крутить что-то физическое, чтобы поменять режимы работы механизма. Сейчас можно регулировать всё в любой момент. Но мой примерно 12-летний опыт продаж показывает, что после продажи комбайна приезжает дилер, настраивает основные характеристики и пишет их в бумажку. Примерно из 200 комбайнов, в списании которых я участвовал, я видел ровно три с параметрами, которые отличались от этой бумажки дилера.
То есть здесь просто идут потери оттого, что этой частью работы обычно жертвуют, чтобы не растрачивать внимания. Я видел, как при уведомлениях «меньше скорость, потери», «недомолот, уменьши подбарабанье» игнорируют алерты. «Деды так работали — на фига туда лезть? Если что-то пойдёт не так, простою же весь сезон». В итоге концентрируются на вождении.
Дальше идёт доочистка зерна. Есть роторные и клавишные механизмы, клавишных на рынке намного больше. Солома протягивается через клавишный механизм, внизу — тоже сепаратор. Доочистка и довыбивание зерна заканчиваются тем, что вся масса попадает в ветра (или аналогичный механизм), когда поток воздуха сдувает всё лёгкое (мелкие куски соломы, куски листьев) в сторону, а зерно падает в бункер. Ветра нужно контролировать жёстко, но, к счастью, можно выставить их перед сменой утром. Рапс — нужен минимальный поток воздуха: семечка очень лёгкая. Кукуруза — максимальный поток.
Опять же на практике это выглядит так: приходит 64-летний Михаил Кузьмич, берёт колос, растирает зерно в руках, потом настраивает ветра себе на участок. Остальные механизаторы подходят, смотрят, копируют настройки.
Очень частая картина.
Взаимодействие с трактором
Уборка может идти либо со сбросом зерна во что-то, что едет рядом с комбайном по уже прокошенному участку, либо нужно время от времени вызывать трактор для выгрузки собранной культуры.
Если речь идёт про движение рядом, то нужно следить, чтобы поток зерна попадал в транспорт. Это значит, что надо напряжённо смотреть теперь в две стороны: на пульт и вперёд.
Если речь идёт про вызов — надо следить за заполнением бункера и думать, как транспорт будет подъезжать, то есть решать стратегическую задачу оптимизации его вызова. Как мы знаем, люди обычно решают стратегические задачи с помощью неидеальных жадных алгоритмов, поэтому здесь тоже случаются потери топлива. К счастью, это наименьшая из проблем на поле, поэтому эту часть мы пока не трогаем.
Гораздо интереснее ситуация становится, когда комбайны двигаются не загонками (по своим участкам), а клином. То есть вместе. Здесь нужно следить за ведущим и другими комбайнами в дополнение.
Точки улучшения
Что может робот
Одна из самых нагруженных частей работы — следить за траекторией движения. То есть рулить.
Прошлое поколение автоматизации решало задачу ведения с помощью GPS-устройств. Вот пример того, как это плохо и достаточно регулярно заканчивается. Напомню, нужна точность 20 сантиметров. В России с ними проблема: если нет активной поправки через Интернет, то нужна наземная станция на 15 км радиусом. Наземная станция стоит денег, и, более того, нужно покупать пакеты сигналов, чтобы она работала, то есть подписку. GPS-комбайны очень «косые» — да, они могут убрать идеальное поле сами, но плохо делают повороты и не следят за ситуацией. При искажениях сигнала оставляют «петухов».
Мы сначала думали про GPS + видеоаналитику, но очень быстро выяснилось, что достаточно только видеоаналитики.
Сейчас комбайн умеет двигаться по плану в загонке, умеет распознавать препятствия и тормозить перед ними, умеет согласовывать движение с транспортом для зерна и другими машинами в клине.
GPS требует долгого программирования карты по навигационным точкам. Это сложный интерфейс, а сложные интерфейсы в поле не работают. Мы сделали куда проще: автопилот видит: «Ого, поле!» — и предлагает передать ему управление. Всё.
Оператор может следить за жаткой и особенностями культуры. Робот рулит.
Режимы:
По кромке скошенной культуры или обработанной земли, по рядку (кукуруза, подсолнечник), по валку (раздельная уборка) + объезд стационарных препятствий, остановка при угрозе столкновения с другой техникой или людьми, определение участков полегшей культуры и предупреждение или остановка перед ними.Кроме комбайна, ещё возможно установить ко-пилота на трактор, косилку или опрыскиватель.
Теперь вы примерно представляете, что нужно, чтобы к вам на стол попали хлеб, кукуруза, макароны, гречка и где там можно накосячить. Я пока на этом остановлюсь, потому что много лет работал в сельском хозяйстве с техникой, а не в разработке и не с нейросетями, но в следующем посте мой коллега из разработки расскажет, как именно всё это работает и в чём конкретно были сложности всё это сделать за два года. А они были, уж поверьте.
Общий экономический эффект — снижение себестоимости зерна на 2,5–5 %. Увы, это аналитика, а не АБ-тест (его сложно провести из-за того, что все участки разные, механизаторы — тоже, и это только второй год работы), но, если интересно, могу рассказать, как мы его рассчитывали.
P.S. Если вашего агронома нет на Хабре, а ему это интересно, можно вот тут вот найти контакты: promo.cognitivepilot.com и предметно обсудить, для какого комбайна, какой конкретно набор техники нужен, сколько примерно стоит, и как это можно быстро посмотреть-испытать.
RamLaksman
Очень интересная статья.
В середине 80-х, я работал в КБ ТМ там уже была тема про т.н. Групповое вождение тракторов и комбайнов. Там предполагалось, что один ведущий трактор, а за ним на кабеле ещё три четыре.
Тогда, по понятным причинам ничего толкового не получилось, хотя идея старая и актуальная.
drWhy
В фильме «Дело было в Пенькове» (1957) главному герою грезились автоматические комбайны.
Javian
Причем в то время были электрические тракторы.

drWhy
Так Штирлиц же, разведчик.
Vornic
Так после войны он ушел в колхоз, потом в Пенькове был конфликт, его посадили…
А есть еще история как он в войне 1812 года принимал участие. У Штирлица обширная судьба…
AntonSor
Интересно, начиная с какой площади поля этот робот окупается
eduard_abdulkin Автор
От 1000 га уже идёт окупаемость. Наша система, в первую очередь, ориентирована на уменьшение времени уборки, за счёт правильности проходов. Также из плюсов меньшая утомляемость комбайнера, что ведёт к большему времени смены при возможности уборки.
Fedorkov
За какое время в среднем окупается внедрение робо-комбайнов в хозяйстве на 1000 га?
eduard_abdulkin Автор
В ценах на дизель уровня зимы 2020, экономия топлива в сезон на одну машину составляет = 3600 руб/смену х 60-85 дней = 216 000 — 306 000 тыс. руб., в зависимости от региона.
Если есть понимание сколько рабочих дней комбайн в активной фазе уборки, можно пересчитать под конкретный случай — это только по топливу.
Есть еще человеческий фактор, который часто важнее:
Fedorkov
А какой порядок цен на внедрение и поддержку одного робота, и сколько нужно комбайнов на 1000 га?
alex_the_II
Честно говоря не знаю, что к чему. Как выходите на рентабельность?
Удается ли «перепрограммировать» колхозников?
По моему опыту — они все работают методами: «деды работали мотгами и нам влели»
fabervox
А где брать мотыги? И где брать ремонтников на станочный парк для ремонта «мотыг», как и сами станки, как у дедов было… Условия работы с техникой, так или иначе навязывают поставщики этой техники и комплектующих, и что-бы было полностью как у дедов, нужно что-бы такой выбор предложили. При этом выбирать будет руководство того или иного уровня.
novice2001
Когда вы (и большинство) перестанете ставить одновременно и 3 нуля и слово «тыс.»?
306 000 тыс. — это 306 миллионов.
AnatolyFruz
это наверное связано с некими привычными стандартами в некоторых областях (только не могу сказать, бухгалтерских или статистических). В частности, знаю по
знакомой — у Федеральной Таможенной Службы РФ часто в статистике оперируют тыс.руб, тыс.дол.
novice2001
Нет, это связано столько с неграмотностью. Можно написать 306 тыс., можно 306 000. Но 306 000 тыс. — это совсем другое число.
DMGarikk
только там они правильно оперируют у них реально такие цифры огромные… а вы бездумно пишете, я помню на это наткнулся когда пробовал давным давно бухотчетность заполнять самостоятельно
была какаято декларация… там поле укажите вашу выручку и поле… пишу 30000… тыкадальше… ваш налог чето типа 500лямов!!! omg… оказывается в поле цифра в млн.руб и моя цифра 0.03
joshhhab
Жаль ГБО еще на сельхозтехнику не начали ставить
cadmi
ГБО на дизеле куда геморройнее, чем на бензиновых ДВС.
Газ не самовоспламеняется при сжатии, поэтому его надо поджигать. Для этого нужно либо впрыскивать дизтопливо в нужный момент (но уменьшать его дозу, то есть перенастраивать форсунки), либо вообще вместо форсунок колхозить свечи зажигания (и всю систему зажигания соответственно).
Так что в отличие от бензинового не только невозможен переход газ/бензин туда-сюда в любой момент одной кнопочкой из салона, но и обратная переделка с газа на солярку будет той же самой канителью (а то и вообще невозможной, столь кардинальными будут переделки).
norguhtar
Дизель можно переделать на чисто газовый двигатель. Но в этом случае на дизеле работать не будет.
nikolayv81
И газ добывать на месте угу...
Am0ralist
nikolayv81
В качестве шутки да а в реальности мало того что это может стать просто опасным (использование гбо на селе), но ещё и приведёт к проблемам в посевную, и.к. цистерну ДТ может купить любой фермер а вот завести себе газовую заправку...
medex81
Освоение OpenCV это конечно нужная и полезная информация и навык, но есть ньюанс… Ничего не сказано про комплект автоматизации для машины, права и поддержка разработчика на установку комплекта. Ладно получили права и начали работы. Цифровое управление на аналоговую технику как сделано? Приводы и датчики на ходовую, управляющая система...ROS? Положение в пространстве GPS + наземная станция поправок(лейка). ПО модели пространства и алгоритмы пути. Алгоритмы обходов и возвратов. Определение препятствий — вода, вязкий грунт, снег, яма, холм, общий тип подстилающей поверхности. А если туман или дождь? Тут телекамера не помощник нужен радар и велодин, а для теплокровных еще и тепловизор. Тот кто хотя бы рядом стоял с темой автоматизации и роботизации аналоговой техники скажет вам удачи в переваривании слона. Многие неглупые люди пытались да обломались :)
nikolayv81
У уборки есть особенности в дождь не убирают, т.к. если не брать в рассмотрение вариант "даже Кировец не проедет" и собственно сбор, есть ещё проблема с сушкой, а если туже семечек не просушить она начинает "гореть", насчёт уборки в туман не знаю а вот ночью и в мороз это пожалуйста.
cadmi
Ночью как правило выпадает роса и молотить нельзя.
У нас даже самые упоротые передовики-стахановцы светили фарами в окрестных полях ну максимум до часу-двух ночи.
nikolayv81
В мороз роса не выпадает :) да и очень от местности зависит.
cadmi
в мороз у нас в Сибири уже нечего молотить :)
drWhy
Работать начинали ЕМПИН часов с пяти, уже светлело, росы к восьми летом практически уже нет. Техника, правда, требовала больше времени для старта. Есть поговорка такая: «Коси, коса, пока роса. Роса долой — косарь домой». Это про траву, но все же культуры разные.
Незадолго до уборочной прокашивалась защитная пожарная полоса по периметру поля — солома уже сухая и любая искра, скажем, с прилегающей дороги, легко приводит к пожару. Эта полоса также позволяет упростить маневрирование комбайна и уменьшить потери зерна.
Ну и, наверно, пришло время «пересадить столбы» (как на анимашке со столбами), и в принципе оптимизировать посевные площади, особенно с уходом опытных операторов и приходом автоматики. Это не высоковольтная ЛЭП, её перенос не так дорог, зато ежегодно последние 50 лет при полевых работах техника тратит лишнюю соляру и время на объезд этой красоты.
Спасибо за статью.
Fregl
А теперь ждем разъяренных чумазых комбайнеров, которые будут саботировать технику :)
drWhy
Вот Spot из Boston Dynamics пройдёт тестирование, и станет присматривать за братьями своими большими.
eduard_abdulkin Автор
Не пойдут, потому что мы не лишаем их работы, а облегчаем процесс, снимая нагрузку. Но придётся доучиваться, потому что требования к мастерству сбора станут выше. Всё же придётся разобраться с настройками механизма для разных участков поля и разного типа зерна.
Мы даём им «помощника комбайнера» которые были у них в 70-90-х годах.
khim
Это сейчас вы даёте им «помощника комбайнёра». А лет через 5-10-20?
Впрочем в ближайшие годы оказаться без работы комбайнёрам явно не грозит, а на 10-20 лет вперёд эта публика не заглядывает, так что в ближайшее время бунтов явно не будет…
drWhy
Лет через 5-10-20, по хорошему, будут новые комбайнёры из помощников. Это передаётся контактным путём. Но может и не будут.
Am0ralist
А много вы народа найдёте через лет 20?
Скажем так, в деревнях народ сейчас не то, что бы прям горит работать на сх
drWhy
Не все. Некоторые минифермеры с удовольствием обрабатывают свои и чужие паи несколькими комбайнами, оставшимися ещё от колхозов.
Как с новой техникой не знаю, недешёвая она для мелких хозяйств.
Am0ralist
Так фермеры по большей части — это состояние души сейчас и целенаправленный выбор людей. Опять же, фермеру найм стороннего человека является риском — какой с него спрос за качество выполнения работы по большей части?
nikolayv81
Видать это информация про нихеоурожайные районы, сейчас есть и новая техника (не у всех) крупные организации пригоняющме свою технику на чужую территорию, когда очень нужно, но проблема как раз в том что крупный владелец техники заинтересован в основном в скорости обработки но не в эффективности увы.
chapai22
По всему миру, в жатву преимущественно работают приезжие бригады комбайнеров.
Натурально кочуют по миру бригадами. Сезоны то везде разные.
Со своим оборудованием зачастую. Или оно рентуется на месте и подвозится куда надо. В Штатах так давным давно и есть визы специальные и прочее.
Это не деревенские крестьяне, а довольно квалифицированный персонал, причем с узкой специализацией. Например из ЮАР и украинцы.
ТАк же оборудование — владеть комбайном фермеру смысла нет -хранить весь год тоже, и обслуживание специфическое. Так что приехали в сезон, все сделали и уехали. Никаких деревенских бабушек и молодцев с тальянкой.
cadmi
«штурвального» :)
спасибо, офигенная статья, вспомнил всё, чему учили в школе
algotrader2013
А почему сейчас без помощников ездят? Если до 150К на комбайнера в месяц тратят в моменте жатвы, то не выгодно ли хозяину зерна еще и за 20-40К кого-то подрядить помогать, сэкономив при этом на потерях от невнимательности?
saege5b
Каким образом?
Посадить рядом? — попробуй пассажиром в легковушке поездить, отслеживая дорожную обстановку — быстро надоест.
drWhy
Дать ему свой пульт, пусть параметры отслеживает — движок, гидравлика, автоматика — то, на что комбайнёру отвлекаться недосуг.
Раньше помощники на раскалённом мостике за открытой кабиной сидели, иногда кемарили в бункере, если он под обмолот не использовался.
Астронавты, летавшие на шаттлах, описывали, насколько морально тяжело сидеть, уставившись в пустую стенку, пока двое из них рулят. А там речь о кратковременном вынужденном бездействии при выходе на орбиту и маневрах.
DMGarikk
Ой, какие знакомые фразы продажника который хочет уговорить купить ;)
помню когда появились бухгалтерские программы, они не лишали работы бухгалтеров, они облегчали процесс и снимали нагрузку…
сейчас у меня в клиентах есть один совхоз, в начале 2000х у них в бухгалтерии работало 25 человек из них 5 кадровиков… сейчас 10 человек и 1 кадровик… притом штат персонала больше и отгрузок больше чем в 2000х
«Программа ваш помощник, вы не будете теперь так мучится» (с)
=====
Я не в критику, а просто как отметить что ваша фраза это лишь шаблонный штамп, в реальности при нормальном развитии технологий профессия комбайнеров вымрет либо очень сильно уменьшится в количественном масштабе
mig126
Благодаря такой программе, мне как мелкому ИП не нужно тратиться на бухгалтера. Работа сезонная, а значит или увольнять каждый раз после сезона или кормить лишний рот, когда денег и так лишь на еду и з.п. работникам хватает.
Весь монотонный ручной труд, где цена ошибки слишком дорога, давно уже должен быть автоматизирован.
Am0ralist
Хочется заметить, что сельские жители как-то давно уже сами по себе вымирают нередко (деревни большие ещё в начале 90-х сейчас поисчезали или по сути стали дачными массивами с небольшим вкраплением местного населения), а уж сельскохозяйственный труд исчезает ещё быстрее — редкие семьи там на себя работают, многие ездят на какие-нибудь фабрики. В таких условиях сия профессия исчезнет сама по себе, вместе с самими комбайнёрами, если только туда не ломанутся какие-нибудь дальнобои, которых из профессии выкинет роботизация транспортных перевозок.
Поэтому в ближайшие лет 5-10 это будут помощники, как было в 90-е с бухгалтерами, а потом станет и заменой, когда потребуется всего несколько человек на обслуживание и контроль большого парка.
burzooom
Химику из «Во все тяжкие» тоже дали помощника в виде Хайзенберга
a0100
Мы ЛИШАЕМ их работы — из за Агро Промышленных Предприятий конкретно вымерло село — рабочие руки не нужны. Торговые сети на селе уничтожают подсобные, личные, дворовые хозяйства. В деревне НЕ ДЕРЖАТ коров — 'молоко' сами берут в магазине. Народ натолкали в миллионники как сельдь — вот теперь 1 серия геноцида с короновирусом. Потом будет вторая — вакцинация не пойми чем. Это уничтожение цивилизации. Приехали. Воронежская область. Черноземье. Зачистка тихой сапой — на Украине в наглую не церемонясь.
DMGarikk
Урбанизация населения — это не вина предприятий, это общемировая тенденция развития человечества
никто насильно не наталкивает людей в миллионники, они сами туда едут.
Зачем?? просто потому что «деды так жили»?
Считаете что вставать с петухами, и пахать до поздней ночи только чтобы сделать себе своими руками пожрать — это цель жизни?
===
про геноцид даже комментировать не буду… бред какойто
a0100
да да — они не вписались в рынок
DMGarikk
мир жесток, хотите вы этого или нет. никто не будет бегать за десятком любителей коровок и плуга с лошадью. только потому что им так хочется
cadmi
И слава богу, что не держат коров и не держат этих чертовых свиней. Чтобы прожить «на всём своём».
Вы просто городской, видимо, поэтому и печетесь по «домашнему молочку».
Жили бы в деревне, быстро бы послали ко всем чертям эту третью смену. Как моя мама, педагог. Сначала в школе полный день, потом дома шестьдесят тетрадей, потом четырех коров (на пике, но меньше двух не было) передоить, телят напоить, молоко отсепарировать (иначе пропадет). К двум ночи, слава богу, можно ложиться спать. В шесть утра снова подоенные коровы должны быть выгнаны в стадо, чтобы пастух угнал на пастбище.
Расскажите деревенским про выгорание, ну. Да пропади оно пропадом, это «натуральное хозяйство».
Раньше держали коров и свиней потому что в селе ни молоко, ни мясо попросту не продавались. Никому в голову не приходило везти в деревенский магазин. Сами налутят.
Сейчас твой собственный совхоз в своем собственном магазине продает как угодно разделанное мясо, фарш, молоко, сметану, кефир и все что нужно. Пошел и купил литр молока, а не два ведра в день (меньше корова не дает).
И плюс это домашнее хозяйство держалось на том, что сено косили и убирали на «бесплатных тракторах» (читай, на ворованной у совхоза солярке), сейчас шиш — никто не станет убирать его «за бутылку», плати наличными. Примерно то же и с комбикормом. И если посчитаете, сколько нынче уходит на это тех самых наличных, то выяснится, что и молочко и мясо выгоднее купить в магазине. Там у совхоза еще и колбасный цех, а в соседнем совхозе варят даже сгущенку и делают сыр.
Вот почему исчезают личные хозяйства, а не потому что враги из «пятерочки» душат коровку у соседки бабы Мани.
a0100
.
eumorozov
Ну так это общемировая тенденция. Народу слишком много, работу для всех не найти никак. Поэтому плодятся "рабочие" места, где люди целый день пялятся в экран монитора или телефона не делая ничего продуктивного вообще.
Вряд ли имеет смысл загонять их всех в деревню выращивать картошку и коров. Поскольку продовольствия сейчас хватает и даже избыток, то, что они будут выращивать, вряд ли кому-либо нужно.
Valerij56
А по поводу бессмысленности загонять в деревню — согласен.
chapai22
Дык людям скучно в ограниченном пространстве и на ограниченной площади.
Если не будет всего этого — они с ума сойдут и передохнут.
Но точно так же не хватает программистов, медсестер и людей чинящих разное. Есть куда "плодиться".
cadmi
В смысле черт знает чем? Вас послушать, так это очень плохо, что сельская учительница или фельдшер прекратили вкалывать в третью смену полноценные девять часов? О да, это неразрешимый трабл. Надо ей подойник в руки сунуть, чтобы не расслаблялась. Это её городская коллега пусть на выбор — или со своими детьми занимается или Донцову читает или YouTube смотрит. А ты, деревенское быдло, иди дои и сепарируй, Солнце еще высоко.
a0100
.
karavan_750
Вряд ли, я (сын двух агрономов) за свое детство редко видел отца, который отвечал за зерновые культуры, чуть чаще видел маму, у которой в попечении были овощные.
В сезон уборки засыпал — отца еще не было с работы, просыпался — он уже на работе.
Если эта техника способна сокращать затрачиваемое время на уборку одной единицы площади, то ей рады будут все — начиная от механизаторов, заканчивая главным экономистом и руководителем хозяйства, а количество гектаров из года в год почти неизменно (влияют только плановые и севооборот).
В частности, в хозяйствах зачастую грамотно сэкономленное преобразуется в весомую 13-ю зарплату для каждого работника.
Но есть нюанс.
eduard_abdulkin, в статье как-то не упомянуты процедуры по модернизации существующего парка машин.
Как предусмотрены нештатные ситуации с выходом из строя вашего оборудования? Вызывать за дорого специалиста из области/столицы или дополнительно обучаете техников хозяйств?
saege5b
Общемировая тенденция к тому, что скоро во все эти модули будут ставить комплекс самоликвидации.
Датчик поломки сработал — вечная память.
euroUK
Очень интересно!
Скажите, а с какими машинами это работает? Сложно ли разбираться с протоколами, закрытые ли они?
eduard_abdulkin Автор
Вот про это мои коллеги из разработки расскажут в следующем посте как раз.
В целом, техника попадается самая разнообразная, поэтому мы ставим свой гидроблок для руления на все машины. Он ставится в разрыв и не влияет на штатную рулевую систему, и при отключении никак не влияет на его работу. А для считывания показаний с can шины о текущих параметрах узлов и агрегатов мы пользуемся данными производителей, но иногда приходится какие-то части реверс-инжинирить.
xztau
А производители комбайнов не против такой модернизации?
Хозяйства позажиточней ездють на John Deere.
eduard_abdulkin Автор
Мы полностью не лезем в системы комбайна — мы ставим Дублирующую систему управления, которая никак не влияет при ее отключении на работу машины.
И не только John Deere, сейчас очень популярны комбайны Claas.
А фаворит (какое бы хозяйство не было) — Ростсельмаш, которые очень сильно подтянулись за прошедшее время и ни чуть не уступают зарубежным машинам.
euroUK
Ну, тут очень спорный вопрос. Я вот слышал, что Ростсельмаш ломается гораздо чаще, чем тот же отверточный российский Claas. А уж аналогов топовых моделей, типа Claas Lexion 780 вроде бы вообще нет у российских производителей. Вроде бы есть Torum, но по факту результат хуже.
eduard_abdulkin Автор
На самом деле — это «палка о двух концах».
По качеству уборки Claas издавна конкурирует с New Holland. John Deere даёт наиболее качественные по сборке машины. Ростсельмашу нет равных в экономических показателях машины (стоимость ремонта и приобретения).
Поэтому, каждый выбирает что ему выгоднее и лучше.
euroUK
Я просто рассматриваю возможность лет через 5-7 (очевидно, что все неясно в таком далеком будущем) переехать на ферму. Сижу пока изучаю профильную литературу (очень кстати интересуюсь современными пособиями по агрономии, если есть у кого, очень прошу поделиться ссылками).
Из того, что я понял, самое дорогое — это простой в момент посевной/сбора урожая. Именно поэтому сколько я видел, советов, все говорили, что лучше дороже, но предсказуемее.
Ну и еще, как верно замечено в статье, наемный персонал это всегда лотерея. Поэтому рассматриваю только те варианты, которые можно обрабатывать небольшим коллективом человек в 5. Именно поэтому я сразу рассматриваю только 12м жатки, сеялки и прочее оборудование.
Ростсельмаш, безусловно, выглядит симпатично. 20 млн вместо 40 за Клаас/НьюХолланд, да еще и с льготными кредитами вроде неплохо. Но меня смущают отзывы, что ломаются часто в первый-второй год.
А так, автоматизация это мечта. Если бы мочь самому сидеть за ведущим а 3-4 машины следовали бы автоматически, это была бы мечта. Но пока такого нет, как я понял. Но 5-7 лет еще в запасе есть)
algotrader2013
Все равно, как я понимаю, в одиночку без наемного персонала не получится владеть фермой с техникой на сотни миллионов, и весь процесс контроллировать. Как минимум потому, что рано из поздно из соседних деревень придут Ваш урожай собрать, да комбайны на детали растащить (или просто сжечь к чертям, чтобы вынуждены были местных подрядить урожай собрать). Или я не прав?
euroUK
Ну понятно, что не в одиночку. Нужна пар-тройка семей.
Что касается собрать урожай, то это не так просто, если мы говорим о промышленных масштабах. Нужна техника. А ее сложно не заметить на открытых полях.
Очевидно, что полностью удаленное решение пока маловероятно, вопрос состоит в простом сокращении требуемых людских ресурсов. Даже не потому, что платить ЗП дорого, а потому, что зависишь от скила этих людей, их трезвости, настроения и прочего. А комбайн стоит 45 млн. рублей. Я бы не стал его доверять кому попало.
Проще людей нанять на какие-то более простые работы. Например, организовать еще и овощные культуры.
nanmen
Вы не сможете конкурировать с Мираторгами и прочими гигантскими агрохолдингами.
Ферма может существовать только в стабильное время, когда цены не туда не сюда. Если будет неурожай, то вы просто не сможете ничего продать и получить прибыль, не сможете расплатиться с банками за соляру и посевной материал. Если будут большие урожаи, то цены на внутреннем рынке упадут, и вы не сможете отбить соляру и посевной материал. А такие события случаются раз в пять-десять лет, поэтому и прикиньте, почему фермеров всё меньше и меньше.
Этим можно заниматься чисто для души, поле в пару гектар и минитрактор. Как я вот занимаюсь. Но я не расчитываю с этого ничего получить, это просто хобби, причём недешёвое по времени.
euroUK
Я не собираюсь заниматься этим на заемные средства. Поэтому мне абсолютно не грозит банкротство по причине неурожая/урожая. И как раз-таки для души заниматься смысла очень мало. Либо профессионально, либо никак.
DMGarikk
эээмм??
euroUK
Я изучаю рынок. Но если я займусь, то буду покупать за свои. И не Ростсельмаш.
S-trace
Можете пояснить этот момент?
В моём понимании электрика "ставится в разрыв" — значит, разрывает существующую цепь и управляет ею либо по своему усмотрению, либо пропуская без изменения оригинальные входные сигналы, а при выходе из строя стоящего в разрыве устройства оригинальные входные сигналы уже не проходят (пример — аппаратный firewall, который ставится в разрыв ethernet-кабеля — выбило его грозой и линк в дауне).
norguhtar
Там не электрика там гидроблок. В пассивном состоянии он не влияет на другие механизмы. К примеру так же сделан электрический усилитель руля. Там фактически электродвигатель помогает крутить рулевой вал. В пассивном состоянии усилителя руля, он не мешает крутить руль.
mig126
Но в случае поломки датчика определяющего вращение(для ЭУР) руля выглядит как взбесившаяся техника.
norguhtar
Ну это зависит от прошивки управляющего модуля. Одни товарищи так пару самолетов уронили.
radiophysicist
По идее на машинах с поддержкой isobus (https://www.claas.ru/produktsiya/easy-2018/terminaly/funktsii-isobus) уже и так должно быть многое автоматизировано. В частности, автоматическое руление по GPS с огибанием заранее отмеченных на карте препятствий. На такие комбайны тоже ставите свою систему?
Реализована ли у вас поддержка isobus, чтобы можно было интегрировать старые комбайны в С/Х информационные системы (FMIS, например myeasyfarm или nextfarming)
Nokse
Есть конечно вопрос — почему было не сделать возможной уборку с обоих сторон комбайна? (это минимизировало бы проблемы с разворотами). Но вероятно выгода от такого комбайна не окупала бы значительно возросшую сложность конструкции.
drWhy
В правильно поставленном вопросе 50% ответа… Комбайн и так с трудом и неторопливо по узким дорогам ездит, мешая остальным участникам движения. Представляете, если и сзади мотовилы поставить? Зато радиус разворота у него и так небольшой для его размеров.
cadmi
тяни-толкай? а куда вы будете копну сбрасывать? набок?
wormball
teecat
Спасибо, очень интересно
В дополнение к препятствиям. Насколько часто под комбайн попадают животные типа зайцев, птиц и тд? Как-то это можно избежать?
eduard_abdulkin Автор
Довольна часто. Вплоть до молодняка кабанов. Зерновое поле — это дополнительное пропитание для животного.
NickKolok
Ультразвуковым отпугивателем?
eduard_abdulkin Автор
Можно, но всех точно не отпугнёт. Да и никогда не задумывались об этом в хозяйствах.
Всегда есть «палка и камень», которые работают лучше ультразвука.
NickKolok
"Палку и камень" нужно бросать "вручную", а мы же за автоматизацию, не?
tormozedison
Не обязательно ультразвуковым, можно и просто звуковым. Не постоянно работающим, а только при появлении объекта.
NickKolok
Так есть возможность автоматикой обнаруживать условных зайцев и куропаток? Или они всё равно попадают в жатку?
ipswitch
Куропаток — скорее всего схарчит только так.
fotofan
Не рассматривали вариант использования коптера-разведчика? Для каждого комбайна или для группы
sleepes
Дамую, это не первоочередная задача. Да и не принесет это какой-либо экономической выгоды.
yatagarasu
Достаточно часто
globalnews.ca/news/5297020/olive-harvest-songbirds-vacuum-trees
uss
а не задумывались над тем, чтоб брать данные для уборки из данных по посадке?
то есть зная траекторию посадки в тупую пересчитать по ширине сделать запасы по 10-15см и получить сразу траектории для уборки?
это не отменяет всего, что есть в статье но упрощает задачу до буквальной: «делай как я»
eduard_abdulkin Автор
Тут очень много подводных камней. Ширина сеялки может сильно отличаться от ширины жатки. Необходимо как-то синхронизировать проходы посева-уборки. Это очень сложно. Траектории движения уборки могут быть различны с посевом. И так далее. Поэтому хозяйства идут по пути наименьшего сопротивления. Отдельно навигация по посев и отдельно управление на комбайн.
Londoner
Главное только между посевом и сбором урожая никаких новых столбов на поле не ставить :)
euroUK
Посадку, насколько я знаю, также нужно автоматизировать. Т.к. на уборку отводится 3-5 дней (иначе зерно осыпается), то посадка должна идти в том же темпе, что и уборка потом.
А значит, это те же 12+ часов смены и аврал. Поэтому идеальный вариант — это ИИ.
eduard_abdulkin Автор
Все верно, этим в хозяйствах занимается агроном. Он делает графики посева и синхронизирует их с графиками уборки по полям.
Fedorkov
Менеджер по продажам, который шарит в ИИ и сельском хозяйстве. Мой шаблон порван в клочья.
eduard_abdulkin Автор
Когда ты сам родом из села, а отец был главным инженером в крупном хозяйстве, когда ты окончил «Горячку» (МГАУ им. Горячкина), потом много лет проработал у Дилера по с/х машинам и в представительстве крупного европейского производителя с/х техники — то это очень легко.
Тем более с каждым годом все больше и больше с/х идёт в сторону ИИ.
mzal
При всем этом опыте не знать, что правильное название агрегата — «мотовило» и нельзя говорить «мотовилой»? Нет, ты менеджер по продажам.
chnav
И кмк без GPS никуда в «умном земледелии», когда надо удобрения дозировать по месту.
saege5b
Кто занимается приёмниками? — и кому это нужно?
А про удобрения: прежде чем ссыпать, нужно знать куда, сколько, чего. — оперативный хим.анализ нужен.
chnav
Естественно, производители смартфонов могли бы подтянуться — улучшеная точность это конкурентное преимущество. Если в чипе уже реализованы SBAS — что им стоит добавить ещё пару PRN-кодов.
AntonSor
Уже сейчас точность достигла необходимой, для навигатора в смартфоне сантиметровая точность избыточна
chnav
Какая… сантиметровая точность у SBAS ??? Вот лишь бы ляпнуть. Я выше написал — метр и менее.
Почему-то в Америке и Европе используют SBAS в бытовых приёмниках и смартфонах. И в вашем смартфоне он есть, только бесполезен на нашей территории. Если вы думаете что точность смартфона эта та цифра, которую показывает GPSTest (2-3 метра), то вы сильно заблуждаетесь.
Вспомните, по какой причине все программы автонавигации притягивают координату к дороге на карте… Да и кто сказал, что навигация в смартфоне бывает только по дорогам? Есть программы пешей навигации, выхода на точку — тем же рыбакам найти лунку. Одно дело копать снег в радиусе 5-10 метров, другое — в одном метре. В общем, не надо говорить за всех. Запущено три спутника и грех ими не пользоваться.
Aquahawk
Это прекрасно, обожаю всякую автоматизацию, особенно такую. Очень рад за вас и желаю всяческих благ.
MinimumLaw
Классная статья. У нас на северах комбайнов почти не осталось, но я-то застал те времена когда они были. Да, право управлять комбайном надо было заслужить. Кого попало туда не ставили. Это реально очень тяжелая работа, требующая автоматизации. Приятно читать что хоть кто-то этим занимается. Успехов.
В качестве вопроса: а как обстоят дела с камнями и сорняками. Первые имеют привычку ломать жатку (смерть в сезон), вторые сильно портят качество зерна и усложняют жизнь зерносушилкам. Мне в свое время основными проблемами были названы именно эти. А уж вождение, настройки и все остальное — это на уровне инстинктов. Впрочем, нет и не было у нас таких огромных полей как на югах. Да и я уже 30 лет как сельского хозяйства не касаюсь. Многое могло и поменяться.
eduard_abdulkin Автор
Здесь мы как и многие пасуем. Это работа агронома, проведение камнеочистки (актуально СЗФО) и правильная работа с химией, уничтожение сорняка и вредителей.
MinimumLaw
Спасибо за ответ. Да, как раз Северо-Запад.
Но Ваш ответ лишний раз доказывает — как не автоматизируй сельское хозяйство, человек там все же остается необходим. Впрочем, в промышленном производстве ситауция не намного проще.
Я думаю, что углубляться дальше смысла нет. Я не агроном и не механизатор. Просто всплыли в памяти разговоры с теми, кто на поля работал. В любом случае удачи Вам. А статьи типа этой читать приятно.
corvair
Не по теме, но в моём городе есть уже редкая и уникальная специальность — оператор механического кран-экскаватора, то есть подъёмного крана на базе канатного экскаватора, используемого на монтаже свайного фундамента в условиях вечной мерзлоты.
DuD
С инженерной стороны и статья и подход безусловно интересные!
Но вот в практическом смысле, готова ли индустрия сейчас вкладываться в это ради 2.5-5% себестоимости зерна? Не маловато ли?
AlexNomad
А так: +2.5-5% к прибыли?
DuD
Важно понимать сколько это в живых деньгах, потому что в процентах выглядит пока не очень. Если там за 20 дней 10 комбайнов ездя криво могут принести урона меньше чем на миллион, учитывая что посчитано в статье скорее всего грубо в плюс, стоимость внедрения выглядит космической.
Am0ralist
Не-не. Ущерб от того, что платить зп сразу двум людям (причём тоже без особых гарантий сильного улучшения) — уже не получается, а один не может следить за всем на 360 градусов, при этом ещё оптимизировать работу по уборке одновременно и всё это на протяжении, считай, светового летнего дня. Поэтому ущерб есть от: непрокоса (то есть либо часть зерна не соберут, либо потратят много времени и горючки на сбор в момент, когда время критично), неоптимизации сбора зерна, и плюс от поломки техники при встречи с препятствиями, из-за того, что человек не туда смотрел — и это в разгар, когда выход из строя критичен. Сельское хозяйство сейчас на грани рентабельности чаще всего идёт, неудачный сезон вполне может обернуться разорением. А комбайны эти и так стоят как космос. В этом плане постепенная разгрузка и замещение человека в кабине на компьютер — это как раз таки вариант, особенно с учетом, что глобального улучшения кадров, мягко говоря, не предвидится…
euroUK
Про грань рентабельности это очень «российское» рассуждение. Конечно, если техника 70х годов СССР, поля лоскутами да еще и почва плохая, то тут, конечно, чистый убыток.
А вот если поля нормальные, техника хорошая, а почва чернозем — то и рентабельность от 10% до 20%.
И плюс необходимо еще понимать, что цифры урожайности заявленные в статистики (типа мы в Ростовской области собираем 30ц/га) обычно в 2 раза занижены, т.к. зерно мимо статистики и налогов просто уезжает в Казахстан.
Именно поэтому смотришь урожайность — вроде бы все на гране разорения, смотришь стоимость земли, где все на грани разорения, а там гектар по 100 тыс. рублей.
Am0ralist
Если б это было так, то в США картинка по самоубийствам фермеров была не такой печальной, как и средний возраст фермеров, как и долги перед банками оных. Или они тоже в Казахстан зерно сплавляют?
То есть 6 соток по цене от 100к вас не смущают? )Ну и то, как люди вахтами в мск ездят работать охранниками, на север по разным специальностям — я видел постоянно. А чтоб комбайнерами… Там много тяжелого труда и мало денег.
Вот в европу на сбор клубники — слышал, да.
euroUK
Я не знаю, что там в США. Вполне вероятно, что США — это высококонкурентный рынок и поэтому с низкими закупочными ценами. Очевидно, что по мере удорожания техники и увеличения ее производительности растет влияние земельного фонда. Если у вас много земли, то вы будете получать прибыль, если у вас мало земли — вы неконкурентноспособны.
В вашем сообщении вы также путаете прибыльность бизнеса и зарплаты рабочим. В России это никак не связано. Очень сомневаюсь, что владельцы скажем пары тысяч гектаров в Ростовской области ездят клубнику собирать в Европу. Скорее всего они ездят на гелендвагенах. Другое дело, что их рабочие получают по пять копеек.
Проблема в России в том, что «фермеры» у нас — это люди либо без земли, либо с ее минимальным количеством. Сейчас, в зависимости от конфигурации поля, один комбайн собирает за сезон легко 700 га. Получается, что меньшие наделы уже уступают по рентабельности.
Так что, как и во всем мире, есть много денег на поля, технику и инфраструктуру — будешь получать 20%. Нет денег — будешь около 0 болтаться.
Ну и последнее. Очевидно, что для более-менее профессионального фермерства зерновых нет смысла рассматривать территории севернее тульской области…
adictive_max
Да-да, лучше быть здоровым и богатым чем бедным и больным.
Не поделитесь, как всем перечисленным разжиться, особенно чернозёмом в местах, где его отродясь не было?
norguhtar
Угу и это сельское хозяйство на грани рентабельности в который год на меньших площадях умудряется выращивать больше чем при СССР. Да и импорта зерна как при том же СССР нет. Сейчас наоборот экспортируют.
Am0ralist
А это не связанные вещи. В той же Европе могут платить фермерам за уничтожение урожая, чтоб переизбыток не обрушил рынки.
А к сх в СССР относились очень… интересно. Особенно, когда на сезонные работы посылало людей с высшим образованием, а местные глядя на них по сути били баклуши, ибо зачем стараться, когда нагонят халявные руки. Ну и халявные руки работали так же через одно место.
То есть вполне можно быть на грани рентабельности, и при этом экспортировать в мир — ведь экспортировать будут другие, которые вам выкрутят цены вниз, чтоб себе забрать больше. Понимаете, вот мои родители ежегодно засаживают 6 соток картошкой и игнорируют, что мне проще потратить тысяч 15 и купить объём картошки на зиму, чем вот так время проводить. А в 90-е только дача и помогала выжить семье из 5 человек, при тех же по сути объемах производства.
norguhtar
Вспоминается недавние качели со стоимостью гречки :)
В СССР в определенный момент КПД сельского хозяйства стал сильно низким. Текущие с/х производители заметно эффективнее их. А насчет грани рентабельности, вы просто посмотрите сколько сейчас в РФ агарных холдингов. Которые в том числе развивают и свое аграрное производство, а не просто закупает ее у других.
Как бы просто если у вас грань рентабельности, то каким образом и зачем вы будете наращивать производство?
adictive_max
norguhtar
Это говорит нам о том что это возможно.
adictive_max
«Возможно» и «в среднем по больнице» — это не совсем одно и тоже.
Особенно если не определено, как нормировать это «в среднем», по количеству предприятий или по оборотам.
Am0ralist
Современные — бизнес, но сколько из него выживет без господдержки, если вдруг сезон-другой неурожая? Без дешевых кредитов?
В этом плане они как раз и вынуждены наращивать производство, чтоб увеличивать обороты и итоговые доходы, а так же снижать расходы за счёт оптимизаций. Потому что не все умеют зарабатывать в IT, например. А в 10%, как выше указывали — это же уровня банковских вкладов, ага. 20% — это уже интереснее. Если ещё 2,5-5% добавить, то смысл наращивать и улучшать — гигантский.
igsend
2,5-5% от себестоимости — это сколько получится в процентах к прибыли? при 10% прибыли, добавка в 5% себестоимости выльется в почти +50% прибыли. имхо это более чем осмысленно.
YulaKa
Как вы это посчитали?
AH89
Занятно. В других странах такой автоматизацией последние годы тоже очень активно занимаются: если погуглить по ключевым словам «robot harvester», то выскочит масса статей. За такими технологиями против простого рутинного труда конечно будущее, несмотря на все сопутствующие их внедрению недостатки, типа роста безработицы и тп.
AntonSor
Если комбайнер работает всего две недели в году, а потом сидит на голом окладе — то почему бы и не заменить :)
cadmi
это он уборочной занят две недели в году :)
перед этим у него сенокос и заготовка силоса, перед сенокосом химпрополка, лущильники, внесение удобрений, посевная, в конце концов. вспашка, боронование. оставленные пары надо прополоть и проборонить. в хозяйствах поюжнее еще и озимые (опять вспахать и засеять)
на селе на самом деле чертова туча работы.
ЗЫ. корова доится без выходных и два раза в сутки :)
SinsI
А вообще, если так сильно перерабатывать и автоматизировать всю систему — то не лучше ли разработать полностью автоматический комбайн, вообще не имеющий ограничения «водитель»?
Ведь у обычного комбайна в очень многое (ширина обрабатываемой зоны, скорость и т.п.) заложена именно максимизация возможностей одного оператора — так что если его убрать в принципе, то и сам комбайн можно радикально изменить — например, сделать флотилию микрокомбайнов-«газонокосилок».
eduard_abdulkin Автор
Идея интересная. Но ИИ на основе компьютерного видения — в целом не нужны радиомаяки.
По факту наша система — водитель комбайна. Система видит край скошенной массы (как и оператор) и ведёт комбайн по ней.
То, что касаемо полностью беспилотного комбайна — мы стремимся к этому. В планах есть много функций завязанных на нашей системе, и на этот год заложено много тестов и аналитики.
Сейчас основная задача сделать мониторинг работы комбайна (качество зёрна, потери, картография), мониторинг оператора (мастерство). Все остальное со временем.
chnav
Вы, видимо, не застали те времена, т.к. я не вижу других причин, почему вы предлагаете вернуться на четверть века назад. Это касается комментариев к любой статье про навигацию в открытом поле.
SinsI
Так им же нужна высокая точность.
GPS зависит от атмосферных флуктуаций, компьютерное видение — от погодных явлений вроде тумана или миража, т.е. и то и другое — не идеально. И сейчас у них только уборка, поэтому они могут использовать край скошенной массы — но что будет когда надо будет автоматизировать посев, где такого края нет, а саму землю надо обрабатывать несколько раз (вначале первичная вспашка, потом выравнивание)?
Маяки же могут давать любую необходимую точность и практически не зависеть от погоды или времени суток. Да и электроника с 90-х ушла далеко вперёд — так что маяки спокойно могут работать от батареи и не требовать обслуживания.
Ну и красть прибор, сама цель существования которого — кричать в открытый эфир «я тут» — не очень разумно.
chnav
GPS Trimble CenterPoint RTX с геостационарного спутника даёт точность 2-3 см, но для аграриев у них есть услуга подешевле RangePoint RTX. Схожие сервисы есть у OmniStar. Вопрос только в том, что это не наши разработки, соответственно на нашей территории единичные станции (ухудшение точности, но для комбайна достаточно) и подписка стоит денег.
)))Про RTK по радиомодему или интернету вообще молчу (для этих целей достаточно L1 Float) — поставил стационарную базу во дворе ближайшей деревни и вещай поправки круглый год. Заметьте — одну базу в охраняемом месте, которая обслужит десятки километров вокруг, вместо того, чтобы каждый день ставить/снимать радиомаяки по границам поля. Логистика просто несоизмерима. Но даже при этих условиях автор упомянул, что это ДОРОГО. А вы про какие-то радиомаяки, которые кто-то должен расставлять, объезжая по периметру десятки километров полей два раза в сутки.
SinsI
Точность 2-3 см получается «in a matter of minutes» — т.е. она требует длительного усреднения данных со множества спутников, причём это наверняка не при любых погодных условиях.
Для не могущих ждать по десятку минут сельхозработ они обещают только точность в 15 см — да и то лишь 95% времени:
Зачем каждый день? Поставил три маяка в начале сезона — и они работают себе год.
chnav
www.youtube.com/watch?v=NGsAPiFu54I
Технологии PPP сто лет в обед. RTX устраивает фермеров всего мира, на точность не жалуются, это при том что они пользуются не самым точным сервисом.
Про маяки мне добавить нечего — тупиковая идея, от которой давно отказались: проблема питания, необходимость обслуживания, малая дальность (никто не станет городить там десятиметровые вышки), проблема безопасности (воруют всё и везде). На сайте геодезистов есть целый раздел «украли оборудование», а ведь там приборы с серийными номерами и продать их сложнее, чем медный кабель.
На заре карьеры я обслуживал береговые маяки Syledis, HyperFix, ARGO, сидел на станциях и пр. Так что все эти проблемы знаю не по-наслышке.
Ещё одна аналогия — сотовые вышки и стоимость их установки-обслуживания. Ваши маяки ничем по сути не отличаются — нужна высокая мачта, ящик с оборудованием, автономное питание.
saege5b
Маяки комбинировать с метеостанциями, и анализаторами почвы.
А то будут роботы-универсалы, а по полям так же будет ездить агроном и жманькать землю.
chnav
Хватит тролить.
saege5b
Я не тролю.
Я помню как агроном в 80х на бешенной ниве мотался по прилежащим полям, контролируя влажность, заморозки и полёглость от ветра/ливня.
Тогда, нас пацанву, на эту тему привлекали, типа если будем мимо, что бы обратили внимание на…
kasperos
Есть такой анекдот про военных:
-а за ночь мы полностью изменим ландшафт, и утром противник будет дизориентирован.
Если работать только по координатам, то если внезапно на поле упадет метеорит оставив длинную канаву, то все комбайны переломают радостно обвесы.
tmin10
Какова вероятность такого события, что его стоит учитывать в системах?
saege5b
С метеритом — не встречался ни разу, но — смыло «полполя» — было пару раз в разных хозяйствах.
QAERFRA
Отличная идея, современные решения для современных проблем
uss
а где фотки чудо устройства управляющего комбайном(закралось смутное сомнение, что вы продаёте и рекламируете не свою разработку)
ну и вопрос на засыпку почему комбайны? ведь так или иначе ширина захвата комбайна больше чем плуга, а значит именно трудоёмкость при пахоте выше, чем трудоёмкость при сборе урожая(ах да… наверное потому, что вспаханую землю от не вспаханой сложнее отлечить чем пшеницу от стерни :) ?)
vvzvlad
Ваш тон оставляет всякое желание продолжать с вами беседу.
uss
а она была начата по сути моих вопросов? или попал в точку и с ответами на эти вопросы всё так плохо?
vvzvlad
cadmi
сразу видно, что вы не молотили и не пахали :)
у плуга есть, грубо говоря, только глубина.
у комбайна — вон вам выше всё написали, скорости вентиляторов веялки, зазоры барабанов, скорость движения машины, вращения мотовила. у комбайна «Енисей» пять педалей и восемнадцать рычагов.
пахать — это курорт в сравнении с уборочной.
uss
у меня сомнения что они могут прикрутить свой автопилот на енисей и подобные «драконы», я наблюдаю за уборочной, когда приезжает десяток комбайнов+штук 40 зерновозов и убирают поле до обед, а после обед другое поле но вот пахота это один трактор от зари и… до «победы»
cadmi
Не надо к «Енисеям» прикручивать, они скоро вымрут естественным путём. Комбайн жутко изнашиваемая штука, там всё в ремнях и шкивах, а сверху пылью присыпано. На месте Красноярского комбайнового уже жилой район строят :)
И к «Нивам» не надо.
А на New Holland, John Deere и даже современный Ростсельмаш все эти гидроблоки прекрасно встанут.
Paskin
Ремни и шкивы — всех нас переживут, с точки зрения TCO/ремонтопригодности они лучше любой другой механики или гидравлики и сравнимы разве что с электрической передачей. Другое дело — плотность передаваемой мощности, КПД и т.п.
cadmi
Ну речь о том, что сейчас уже не делают тех комбайнов, а скоро к ним не будет и запчастей. Вымрут сами, без насильственного элиминирования путем внедрения автопилотов.
eduard_abdulkin Автор
Все оборудование можно посмотреть на нашем сайте, о его устройстве расскажут мои коллеги в следующем посте.
TheNavi
Вот интересно — а вообще есть какие либо новые тенденции в автоматизации сельского хозяйства? Например, есть ли какой смысл замены больших комбайнов на рой маленьких агрегатов? Например дроны сборщики + дроны доставки зерновых культур в грузовики на окраине поля. ИМХО, ведь рой дронов уборщиков имеет с одной стороны неоспоримые преимущества с точки зрения отказоустойчивости, сиречь возможности продолжать уборку пусть меньшим количеством дронов, но не терять время на простой большого комбайна.
uss
наоборот тенденция идёт к увеличению по крайней мере при земледелии.
для того, чтоб вспахать нужно на 1н плуг 40 лошадиных сил, при этом ни для кого не секрет что кпд больших двигателей и надёжость выше чем маленьких+затраты на оплату труда+надёжность(6 маленьких тракторов с двухрядными плугами будут чаще ломаться чем один на 12ти рядным), то же самое и с комбайнами-сеялками-опрыскивателями…
маломощная техника имеет свою нишу но основной пласт работы ложится на плечи гигантов( раньше в каждом колхозе были рои мтз80-трудяг сейчас 2-3 гусеничных cat 765, 875 и подобные, кудесника делают ту же работу и никто в мазуте с головы до ног не ходит каждый день)
cadmi
с момента появления ленинградских К-700, харьковских Т-150К (Т-150) и алтайских Т-4 те МТЗ-80 только навоз с фермы возили да комбикорм на неё же :)
Foror
>и надёжость выше
Суммарно надёжность у роя дронов будет выше, но это не точно (чисто интуитивно, после 15 лет разработки ПО).
>затраты на оплату труда
Дронам не нужен оператор.
>6 маленьких тракторов с двухрядными плугами будут чаще ломаться чем один на 12ти рядным
Сломался один — у нас еще 5 в работе, дело идёт. Сломался один 12ти рядный — дело встало. Плюс починка маленького дрона дешевле и быстрее (на порядок?) огромного комбайна.
Просто никому не интересно этим заниматься при капитализме. Продукты в магазине есть и ладно. А так можно было всю цивилизацию бесплатными продуктами обеспечить. Если заняться автоматизацией этой темы по серьёзному, с грамотными спецами, с нуля, а не свистелки и перделки к комбайну прикручивать.
norguhtar
Дронов там больше для съемки полей и селективного вноса удобрений и гербицидов стараются внедрять. А ну да и еще вполне активно используются спутниковые снимки. К примеру одна из самых больших спутниковых группировок занимается и этим в том числе.
Yoooriii
Забавно, никогда не задумывался как эта система работает. А вот интересно, может ли такой робот работать ночью в темноте, то есть 24 часа в сутки?
DuD
Делов то, свет включить и нейронки переобучить, а может и не надо будет переобучать, так разберутся.
Но тут другая проблема. Ночью оно никому не надо. Ночью роса, ночью люди спят…
eduard_abdulkin Автор
Робот может, а вот зерно ночью будет влажным, поэтому будут высокие экономические потери на сушку массы. Ночью удобно делать другие работы, например, первичная почвообработка или ТО комбайнов.
RLin
Не каждой ночью зерно будет влажным. Зависит от погоды и относительной влажности. Много раз сталкивался с ночными уборками. Так что, следует быть готовым, что будут эксплуатировать и по ночам.
Serb514
Носов в Незнайке в Солнечном городе автоматические комбайны описал в деталях, в плоть до вспашки и посева сразу же после сбора урожая. Опоздали вы :)
drWhy
Ну Носов молодец, у него и Луна заселена. Прямо визионер.
yleo
Что-то у вас с расчетами плохо. Если с утра недобор по ширине 30 см, а к вечеру метр (что де-факто не часто), то в среднем за день меньше 70 см. При ширине жатки 9 м это 0.7 / 9 * 100 = 7.8%, но никак не 25.
adictive_max
Повторный прогон на участке увеличивает затраты времени в 2 раза, а эффективность сбора падает до тех самых 7.8%. От ширины зависит, отправят ли на этот второй прогон, или решат что фиг с ним, соляра дороже выйдет.
mbait
Интересно было бы послушать организационную часть работы компании. Насколько сильный интерес со стороны фермеров? Насколько инвесторы верят в успех? Каким образом вы добиваетесь тестирования в полях? Есть ли программисты, которые сидят на поддержке? Интересуюсь, потому что работаю в компании, которая делает робота для сбора клубники, и, честно говоря, интерес фермеров не особый. Их всё устраивает как есть, и они видят перспективы в технологии только в свете того, что в Калифорнии всё время растёт минимальная почасовая ставка, а президент всё вермя грозится перестать пускать дешёвую рабочую силу в страну. Да и задача сбора урожая выглядит простой только на первый взгляд, а фермеры хотят, чтобы "женщину вынули, автомат засунули", то есть, чтобы для них замена человека роботом выглядела прозрачно. Инвесторы тоже не очень заинтересованы, они скорее дадут сто миллионов на очередной мессенджер. До нас другая компания потратила десят лет на решение задачи после чего переключилась на более простую.
gleb_kudr
А где почитать про вашу разработку? Она может быть востребована в странах типа Финляндии. Тут килограмм ягоды с поля стоит 5 евро, а со сбором — 10 евро. Разница двукратная. Робот бы окупался очень быстро, если он реально умеет собирать качественно и не специальные стеллажи, а культуру из грунта.
mbait
Прочитать пока негде, можно посмотреть короткое видео на advanced.farm. Робот "реально" умеет собирать с грядок, но есть много нюансов, которые ещё не решены.
eduard_abdulkin Автор
Мы работаем над парой крупных внедрений, например, более 100 комбайнов в РусАгро. Как закончим — напишем про это отдельно.
RLin
Мда, взбудоражили вы своей темой )
Раз в открытую сеть вышли — вы готовы же к вопросам, верно? Их есть у нас масса.
Пара вопросов про коммерцию.
Вы тут пишете, что стоимость решений с RTK-станциями высокая. Она составляет где-то 500 т.руб базовая станция + 500 т.руб. оснастить и подключить одну единицу техники (навигационная система + радио или GSM модем) единоразово и дальше точность 2 см в радиусе 15 км от станции.
Какая математика с вашим решением? Какая рыночная стоимость на одну единицу техники?
Есть ли какая-то абонентская плата или один раз купил и пользуйся? Обновления софта платные будут?
Сколько, реально, «умных» комбайнов уже трудится в полях?
Пара технических
Как делается калибровка, корректировка, натаскивание на край? Культуры-то разные и край, соответственно, тоже разный. Машины и их ТТХ разные. Как делается настройка ширины захвата? Комбайнер сам все настраивает? Или звонить «в Москву» сразу?
У вас круглосуточная техподдержка? Удаленно проблему человека, который не понимает терминологии, в поле решите или у вас летучие бригады по регионам?
Что если что-то «глючит», машина перестала слушаться руля? Как в том фильме, стрелять в нее из дробовика? :)
eduard_abdulkin Автор
Мы делаем полностью самостоятельное решение, которое работает по принципу «вижу-делаю», даже, если вы работаете в условиях отсутствия всего (спутниковые сигналы, сотовая связь и тд).
Рыночная стоимость — это рынок, поэтому мы гибко работаем от объема, специфики и нужд хозяйств. Средняя рекомендованная рыночная цена — 650 тыс. рублей за полный комплект
Сколько комбайнов — в прошлом году были запуски в пилотных хозяйствах, в 2019 году — около 14 единиц в российских хозяйствах; в 2020 — уже оснащаются десятки хозяйств и количество комбайнов будет исчисляться в сотнях.
Калибровка и тд — это делается на этапе установки, общая настройка производится. «Мозги» обучаются на этапах подготовки производства и обновляются по мере выхода обновлений. Если у хозяйства есть особенная культура (например, есть культура Амарант), то на нее обучение производится так — выходит на поле комбайн и механизатор проводит уборку в некотором интервале времени (например, одну смену).
Наша коробочка пишет данные и выгружает их на СХД, в течение суток сеть дообучается с участием наших инженеров (иногда нужно сделать доразметку данных), и далее можно выгружать ее обратно в машину.
Это сценарий «горячего» апдейта.
Ширина захвата — в интерфейсе есть пара кнопок ±, которые регулируют установку ширины захвата, на дисплее это отображается сразу же изменением картинки,
если перестала слушаться руля, хотя такой сценарий трудно представить, когда отключается питание системы, гидроблок переходит в состояние «нормально открыт» (это управляемый клапан) и управление возвращается в полностью штатный режим.
Повторюсь, про технику будет отдельный материал.
vlreshet
Может я упустил что, а может просто не очень понимаю суть, поэтому вопрос: а почему нельзя пускать жатку «внахлёст» к предыдущей полосе? На тот же метр. Понадобится чуть больше проходов по полю, зато гарантировано без «петухов». Или не всё так просто?
mayorovp
Я так понимаю, за жатку "внахлест" комбайнеру заплатят меньше.
Am0ralist
1 метр из 9? Потери в 11% вас не смущают? Ведь это увеличение количества топлива и времени, которое потратят на уборку поля.
mayorovp
Нет, потери времени тут как раз нормальные, если вспомнить, что альтернатива — оставить 1 метр, который потом придётся обрабатывать вторым проходом поутру, теряя 8 метров из 9.
boroda_el
Вариант мини-комбайна? С шириной захвата метра 2 и низкими расходами. Задача — подчищать за большими, уборка сложных мест.
Am0ralist
Ну так тут и нюанс, что если получится автоматизировать и не оставлять этот метр, то это намного лучше, чем решать вопрос таким способом (при том, что это опять не гарантирует идеального покрытия поля — человек отвлёкся, что чаще к концу рабочего дня и т.п.)
vlreshet
Vitaly_Z
Вам бы лет 4-5 комбайном поуправлять, полную уборку урожая, прежде чем заниматься постановкой задачи.
sim2egor
Как-то попахивает жульничеством… И GPS — «плох»… навигация по камере достаточна (гыгыгы) и недомол… и т.д и т.п. жулики!
Ruslan4ik161
Некоторые термины и описание процессов вызывают смех. Идея интересная с вождением комбайна в автоматическом режиме. На больших правильной формы с отсутствующими препятствиями комбайнер и так справится на ура с вождением. То что комбайнеры редко идут на полную жатку при уборке зерновых это так. Это изза низкой квалификации и не только. Зачастую впереди идущий комбайн носком жатки давит массу и чтобы ее поднять приходится выпускать жатку что естественно снижает рабочую ширину( увеличивая тем самым затраты). Мой совет: попробуйте сначала сесть и скосить качественно хотяб гектаров 10. Не почувствовав своими руками каково это косить на комбайне не поймете как робота настроить. Про мотовило сзади на комбайн вспомните анекдот про мужика и косу. Аналогично.
KonsuL
Вопросы немного «впереди паровоза», но очень интересно:
Очень интересная и мотивирующая статья, спасибо!
eduard_abdulkin Автор
Эти темы осветим в будущем.
ultra2
Очень круто. Для столь консервативной отрасли. По зерновым рынок и масштабы понятны, а есть ли что то для овощеводов? Овощи — самая высокозатратная группа культур в пересчете вложений на гектар, море проблем с сорной растительностью в том числе при органическом производстве, которое медленно но верно входит в правовое русло в РФ. Зарубежные разработки уже есть, мы не отстаем?
eduard_abdulkin Автор
Есть мысли для выведения системы для работы по овощам открытого грунта и свёкле. Но для этого нужно время для проведения необходимого количества тестов и аналитики. Скажем так — это следующий этап после зерноуборки.
RLin
Вот с консервативностью вы не правы. Высокие технологии (навигация и GPS, датчики, подруливающие устройства, автоматическое управление рабочим процессом) — уже больше 10 лет в полях. Консервативность больше не в отрасли, а в механизаторах и людях на местах, к которым начали предъявлять более высокие требования. По моему опыту общения с механизаторами — умение человека работать с компом и не бояться его — уже дает ему преимущество при работе с умной электроникой машины. Те, кто и Винду сами переустановят (молодые, в основном) — быстрее сервисников находят поломки и заложенные разработчиками фишки.
Зарубежные разработки машинного зрения есть. Но в этой части мы пока ноздря в ноздрю, благодаря подобным компаниям )
nikolayv81
Проблема с компом, в том числе что в него нельзя лезть, т.е. если арендная техника встала (а на уборке часть арендуется) то жди пока приедет сервис (а это 50 км от базы, из них 20 дорога по которой не каждый рамник со скоростью более 20км/ч проедет), и это хорошо если он сейчас не с другой стороны области у более крупного клиента, условно если простую но менее эффективную технику можно было починить на месте сварочным аппаратом и небольшим набором инструментов, то с новой есть проблемы, причём это проблемы конкретного механизатора т.к. он оказывается на время ремонта без большей части своих доходов, а его, по сути, на весь год кормит этот месяц
cadmi
конкретный механизатор может отключить всю эту ИИ лабуду и молотить, как дед это делал. медленнее, с огрехами, не так экономно, но молотить.
я предположу, что это и главный агроном одобрит, а не заставит три дня стоять в ожидании ремонта.
nikolayv81
"всю эту ИИ лабуду"
Рассказывали както модный девайс за много миллионов просто встал и сказал, "не ехать не буду" как выяснилось какой-то датчик барахлил, но проблема в том что рассказал он об этом только сервисному инженеру который с кодами доступа(вроде как) приехал. Современная сельхоз техника и стоит дорого и сильно умная, для примера приведу более близкий пример подобного поведения в автопроме, современный автомобиль после "столкновения с сушробом, и выстрела подушек", может не захотеть заводиться даже без серьёзных повреждений и ему плевать что вы в лесу в мороз без связи в 100км от населённого пункта, просто современный мир страховой ответственности так устроен.
cadmi
То что вы описываете, будет так себя вести и без добавления того, о чем пишет автор поста. Вот что есть «эта ИИ лабуда» (добавленная компанией cognitivepilot), что нет её.
А у них гидроблок. при обесточивании комбайн превратится в то, чем он был до их вмешательства.
Я понимаю, что вы пишете о «современной технике» вообще, а не по теме поста, но это уже растекание мыслью по древу.
Да и в любом случае, комбайн СКД-5 можно было чинить кувалдой, в отличие от нынешнего John Deere. Но вот только закавыка — этой кувалдой нужно было стучать каждый день с утра и по четным дням — во время обеда. И еще по нечетным после ужина :)
А с современной все-таки большей частью один раз в сезон, при подготовке. Поэтому проблемы конкретного механизатора действительно мало колышат главного инженера :)
nikolayv81
Ну так сверху было про общую "консервативность механизаторов".
Про один раз в сезон увы это на рекламный плакат больше смахивает, это какбы с полей информация, не говоря уже о том что даже 1 раз в год в самый неподходящий момент это много. Да вероятно в крупных агрофирмах эти вопросы решаются по другому, всё что слышу я это со слов механизаторов и это не про крупные компании, в принципе прогресс налицо, особенно когда человек может провести почти сутки в кабине с кондиционером а не в парилке при 40+ и дыша при этом земляной пылью.
Увы у многих технологий есть ограничения, которые сейчас обойти почти невозможно (из-за автоматизированного контроля и ограничений) иногда это приводит к необоснованным простоям, и рынок этой проблемы не решает т.к. многие отрасли уже давно нерыночные (новые игроки просто не могут появиться в силу не только финансовых ограничений но и правовых).
cadmi
Ну вот это крупным агрохолдингом не назовешь. Мужики в целом довольны, ніколи знову :)
Am0ralist
А может наоборот, сделают удобную блочную замену и оставят ремонтный комплект блоков, если купите автоматизацию на 20 машин сразу. И хаутушку пошаговую, как разъем вынуть, переставить модуль и воткнуть обратно. Вопрос подходов.
nikolayv81
Есть 2 проблемы, 1е чтобы узнать какой блок не работает нужно зайти через сервисное по которое производитель комбайна всем подряд не раздаёт (пример про авто это когда мы берём машину у клиента (Volvo) делаем механику, заменяем блоки а для их прошивки везём машину эвакуатором к оф. сервису), 2-я крупным владельцем комбайнов является некоторая комбайношеринговая(лизинг с кучей ограничений) компания, и именно она решает сколько лицензий на сервисное по закупать.
mikleh
Насколько ваш автопилот лучше/хуже дороже/дешевле тримбла? Хотелось бы сравнения именно с курсоуказателями.
eduard_abdulkin Автор
Мы проводили тесты. Получается, мы значительно дешевле, чем аналогичная спутниковая система (грин стар, тримбл, топкон и другие). Наша система значительно легче для освоения ее инженерным составом хозяйства (механизаторами), так как для настройки спутниковой системы необходимо внесение в ее данные большого количества исходных данных и погрешностей. Плюс при работе спутника, есть частая проблема потери сигнала, нужно постоянно ее колибровать.
Мы же сделали нашу система с «заточкой» на российские реалии и функционал для комбайнера просто ВКЛ/ВЫКЛ. Все остальное делает система.
Мы не сильно уступаем спутниковым системам, при условии использования бесплатного сигнала спутника. Но пока ещё не дотягиваемся до платного сигнала при использовании РТК станция со сверхточным ведением. Мы над этим работаем и есть куда стремиться.
Основное преимущество в том, что для нашей системы не надо покупать каждый год пакеты сигналов по несколько тысяч долларов. Наша система «поставил и забыл» — что и нужно большинству хозяйств.
Наша система состоит из камеры, блока управления, гидрораспределителя с электронным управлением, датчика поворота колёс.
Плюс мы работаем в рублевой зоне и все оборудование фиксированно в рублях
Спутниковая система: антенна (таблетка), блок управления, монитор (курсоуказатель), прошивка трактора (комбайна). Если есть РТК станция, то плюс и она.
Все это в валютной стоимости. И так же стоимость пакета сигнала, который так же в валюте реализуется.
RLin
А какую точность вы заявляете на данный момент?
ghost_pvo
Очень интересно. Даже не представлял, что столько вытекающих при сборе урожая.
Фотка с уложенным столбом ЛЭП особо впечатлила. Ваше достижение?)
saege5b
Мне приходилось видеть берёзу собранную на зерно, или чугунные перила моста — на силос.
Keynessian
А традиционную парочку лежащую в поле, комбайн распознаёт и подаёт звуковой сигнал?
Am0ralist
Тут, думаю, надо инфракрасники добавлять…
cadmi
Свои знают, что там лежать не надо, а городских, алчущих романтики, не жалко :)
Прелести «душистой травы в стогу», надо заметить, сильно преувеличены. Только колется и попа чешется, так что действительно, разве что городские в первый раз, кто для инсты, кто для порнхаба :)
mig126
Городских то может и не жалко, но если намотает это же сколько часов простоя.
eumorozov
Ха, действительно, жил в детстве в деревне все каникулы. Начитался романов, и полез на сеновал подремать. Вскочил как ужаленный через 10 секунд. В книгах явно что-то не договаривают.
На пшеничное поле любил ходить пожевать созревшую пшеницу. Не то, чтобы очень вкусно, зато интересно. Вот на поле тем более желание полежать не возникало.
khim
Но это не значит, что на сеновале нельзя спать…
cadmi
Можно. Но, скажем так, никто не спит просто в куче гусиного пуха, почти все норовят соорудить хоть какое-нибудь подобие подушки :)
khim
Ну вот и не сеновале — та же фигня. Кстати у моей матери подушка — как раз из сена. Ибо у неё алергия как раз на тот самый гусиный пух.
Не могу сказать что она прям уж лучше, чем с гусиным пухом (сено таки дешевле, так что если было бы ещё и лучше, то кто бы с тем пухом возился?), но… спать можно.
Am0ralist
Я вот вообще в свое время спал на подушке с гречкой. нафиг мягкие, подсыпал сколько надо и дрыхнешь без задних ног
cadmi
habr.com/ru/company/cognitivepilot/blog/496058/#comment_21490298
cadmi
Этот комментарий был про концепцию наволочки, а не про отличия между пухом и сеном. Просто вы не поняли, но это бывает. Надо просто прочесть второй раз и не воспринимать прочитанное слишком прямолинейно.
Am0ralist
Пфф, а мы детьми валялись, правда взрослые были недовольны вечно чем-то)
mig126
Аналогично. Может сено другое, а может из за того что траву косой срезали.
cadmi
habr.com/ru/company/cognitivepilot/blog/496058/#comment_21490318
cadmi
Пфф, мы детьми не просто валялись, мы однажды потеряли своего друга на совхозном сеновале в скирде емкостью около двух сотен копен.
Там были «червоточины» внутри, мы лазали, как по пещерам и он натурально заблудился. Мы вылезли, слышим голос, а достать не можем. Он там уже задыхаться начинал, когда удалось достать. Прокопали всё-таки сбоку дырку, было нелегко голыми руками. А крюк, которым выдергивают сено, использовать нельзя, заколем же нафиг. Да и не было этого крюка, там ведь трактор стогометом эти скирды разбирает. Хотя конечно можно было сбегать к ближайшему дому и притащить оттуда, но не было смысла.
Вот только все эти лазания и валяния заканчивались всегда одинаково — яростной чесоткой и баней :)