
 Пилот записывает данные в полетный журнал «Индженьюити».
Пилот записывает данные в полетный журнал «Индженьюити».30 апреля 2021 года главный оператор марсианского вертолёта «Индженьюити» Ховард Грип (Havard Grip) подробно рассказал о фазах полета над поверхностью Марса во время его четырех миссий — взлете, парении и посадке.
Сотрудник лаборатории реактивного движения NASA (Jet Propulsion Laboratory, JPL) уточнил, что НАСА перед каждым полетом загружает в «Индженьюити» инструкции для новой программы полета. Но по факту вертолет работает автономно, полагаясь на набор алгоритмов управления полетом, которые НАСА разработали на Земле, еще до того, как «Индженьюити» был отправлен на Марс. Чтобы разработать эти алгоритмы, НАСА выполнило детальное компьютерное моделирование и имитационные полеты на базе лаборатории JPL в барокамере высотой 25 метров и диаметром 7,5 метров, чтобы понять, как вертолет будет вести себя в марсианской среде. Но многие аспекты полета на Марсе выяснились только в реальных условиях на планете.
Взлет
В отличие от обычных земных мультикоптеров, полет «Индженьюити» не управляется изменением скорости вращения ротора. На дроне установлены два соосных несущих контрвращающихся карбоновых винта диаметром 1,2 метра каждый. НАСА управляет полетом так же, как это делается в полномасштабных вертолетах — изменяя угол наклона лопастей, который влияет на «угол атаки» их профиля и тем самым создает необходимую для взлета подъемную силу. Как и в случае с земными вертолетами, НАСА может изменять угол наклона лопастей «Индженьюити» двумя способами — в режиме «коллективного управления», который изменяет шаг лопастей равномерно, а также с помощью режима «циклического управления», при котором наклон лопасти зависит от угла поворота ротора.
Во время взлета, после того, как лопасти начали вращаться с заданной скоростью 2537 об/мин, резко включается режим «коллективного управления», чтобы вертолет оторвался от поверхности. Во время этой начальной фазы взлета НАСА ограничивает систему управления полетом, разрешая ей реагировать только на данные об угловых скоростях аппарата (скорости вращения или наклоне вертолета). Это сделано для того, чтобы система управления не пыталась противостоять взлету.
Первая фаза взлета длится всего доли секунды. Как только вертолет набирает высоту более 5 сантиметров, его бортовая система получает полный контроль над положением, скоростью и ориентацией вертолета. В этот момент начинается процесс увеличения вертикальной скорости до 1 м/cек для штатного набора высоты.
Как только вертолет взлетит на 1 метр, он начинает использовать свои бортовые датчики — лазерный дальномер и навигационную камеру. До этого момента датчики отключены, так как на них может влиять пыль с поверхности во время взлета. До достижения высоты в 1 метр вертолет полагается только на данные с инерциального измерительного блока (IMU), который измеряет ускорение и угловую скорость. Фактически этот этап навигации сравним с измерением пройденного человеком расстояния путем подсчета шагов. Это совсем не точный способ при больших измерениях, но поскольку вертолету требуется всего пара секунд, чтобы достичь 1 метра высоты, то погрешность получается небольшая.
Данные первых полетов показали, что «Индженьюити» поднимается на 5 см над поверхностью за 0,25 секунды. Во время этого начального разгона происходит скачок мощности, необходимой для работы роторной системы. Полеты показали, что он может достигать 310 Вт, что ниже максимальной рабочей возможности отдачи энергии для его батарей, которые могут выдерживать скачки до 510 Вт.
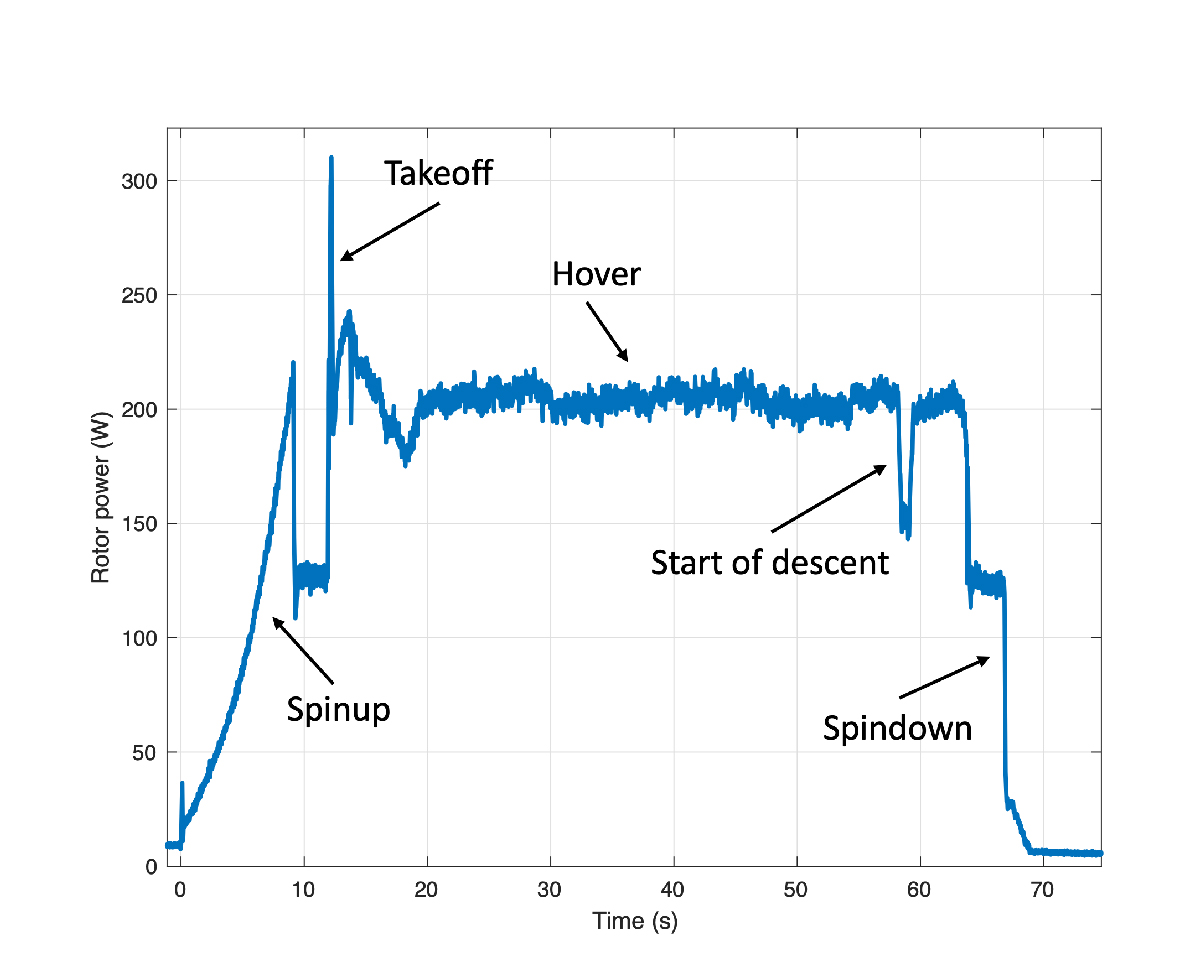 Телеметрия энергозатрат ротора во время второго полета.
Телеметрия энергозатрат ротора во время второго полета.После взлета «Индженьюити» потребовалось около 2 секунд, чтобы достичь высоты 1 метр, на которой он начал использовать полный набор своих датчиков. Данные с навигационной камеры показали, что особо пыли или песка, которые могут повлиять на датчики, при взлете нет, так что в НАСА даже перестраховались по этому поводу.
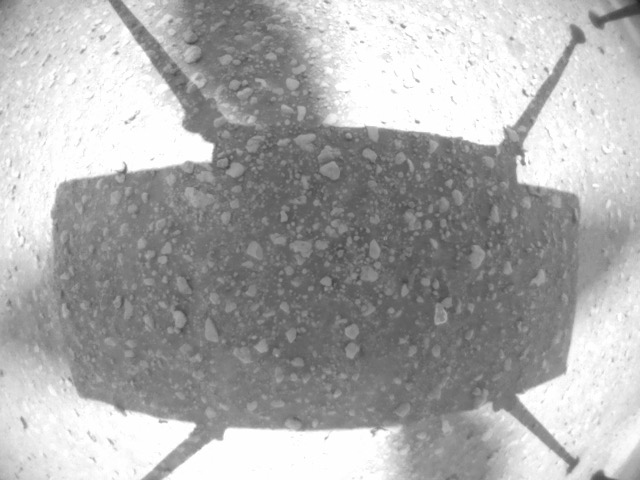 Поверхность под вертолетом при взлете.
Поверхность под вертолетом при взлете.В тот момент, когда опоры вертолета отрываются от поверхности, на его движение начинают влиять потоки ветра. Он могут даже на мгновение резко сдвинуть аппарат, причем из стороны в сторону, или дернуть его, наклонив вперед или назад при взлете до того момента, пока он поймет ситуацию и начнет ей противостоять. В НАСА подготовились к таким проблемам и вертолет способен выдержать некоторые незначительные углы крена/тангажа при взлете, даже если ветер сильный. Первые полеты показали, что он наклонятся лишь на пару градусов, что обеспечивало ему стабильный вертикальный взлет.
Парение
Во время этой фазы вертолет самостоятельно пытается поддерживать постоянную высоту, курс и положение, основываясь на навигационных данных со своей камеры и высотомера. Первые полеты показали, что его система управления стабильно справляется с этой фазой полета.
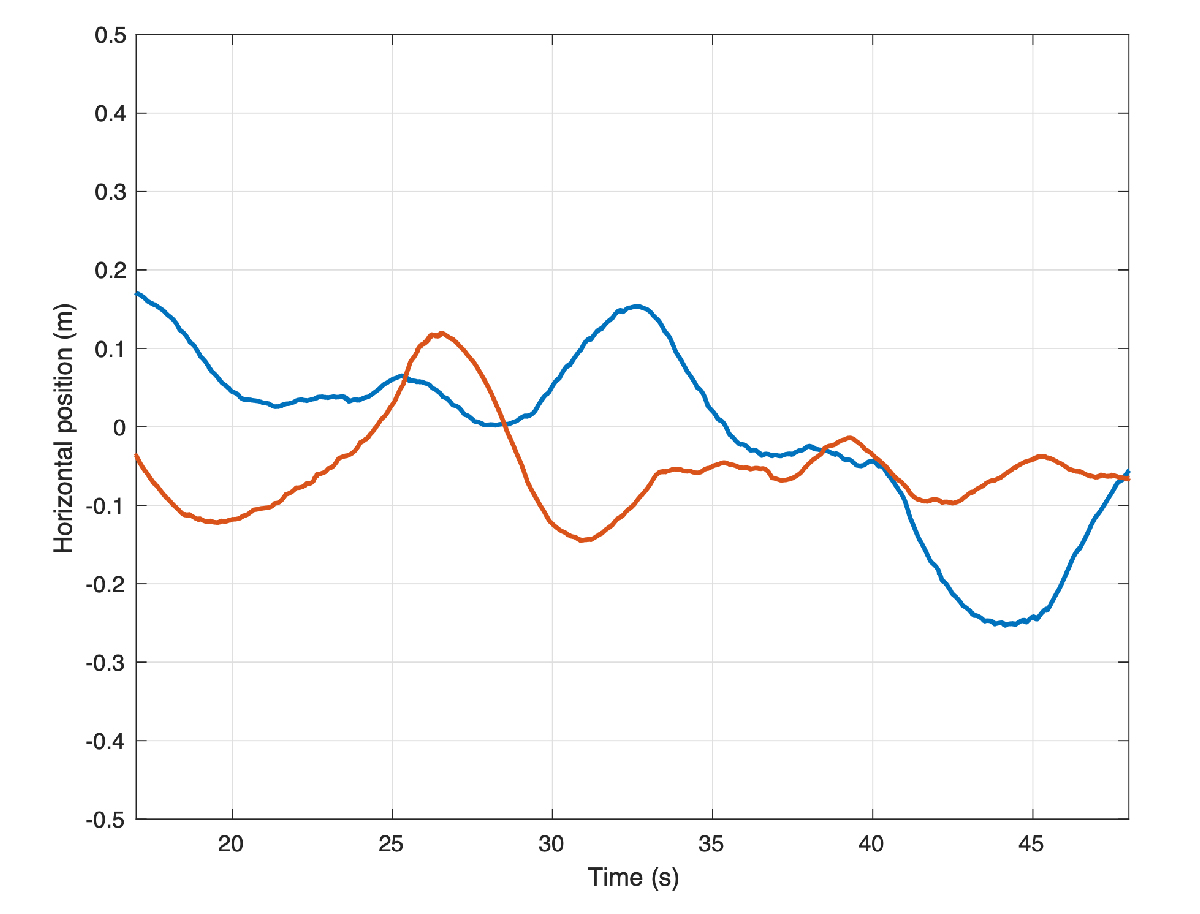
Телеметрия горизонтального положения вертолета во время выполнения парения в первом полете.
Данные с вертолета показали, что он удерживает высоту в режиме зависания примерно с точностью до 1 см и удерживает курс в режиме парения с точностью менее 1,5 градусов. В случае порывов ветра происходили его горизонтальные отклонения примерно до 25 см.
Во время большей части полетов вертолета на Марсе был ветер 4-6 метров в секунду с востока и юго-востока с порывами до 8 метров в секунду.
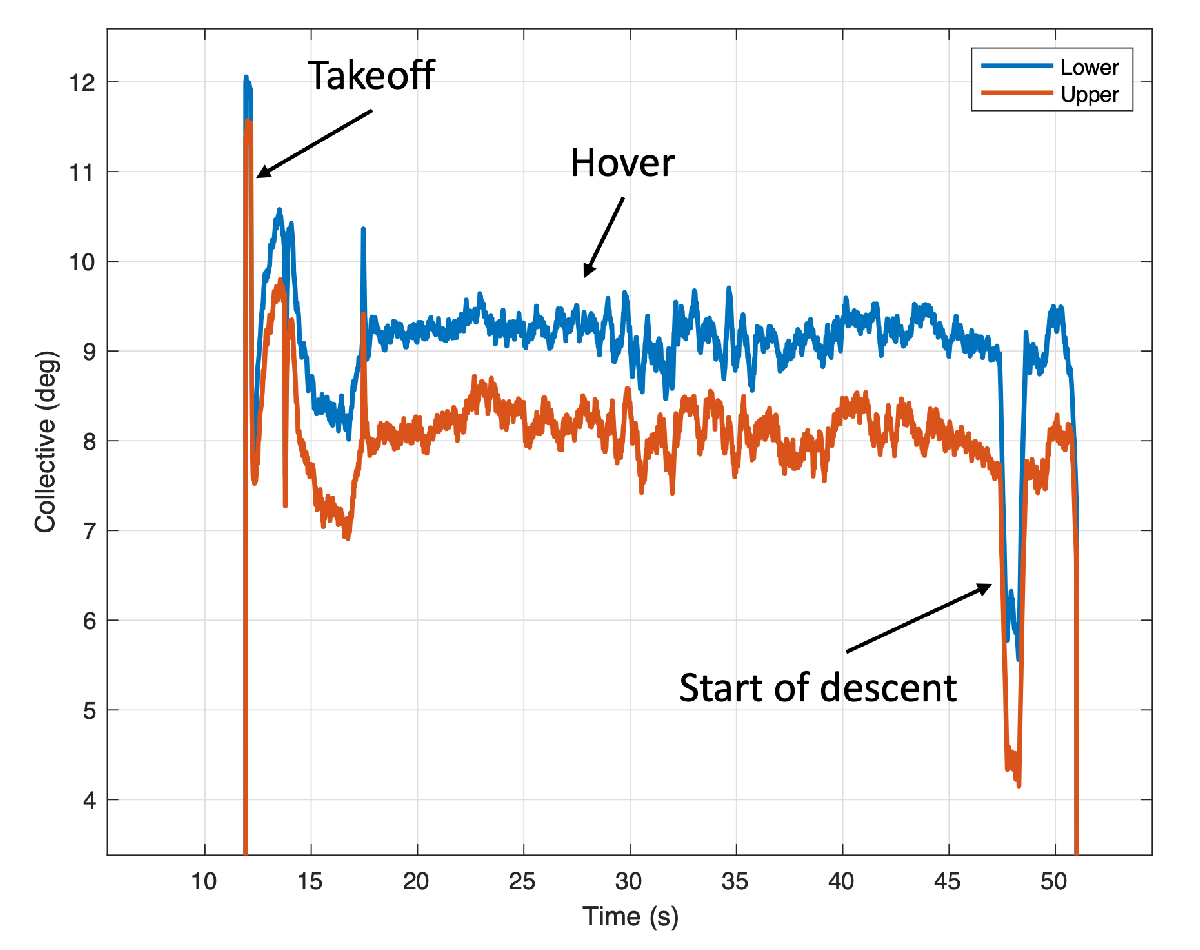
Телеметрия лопастей в режиме «Коллективного контроля» во время первого полета. Во время этого полета нижняя лопасть была под углом около 9,2 градуса, а верхняя 8,2 градуса.
НАСА пояснило, что вертолет во время полетов находился в зоне расчетного «аэродинамического комфорта» — мощность его электрического ротора была стабильна на уровне 210 Вт в процессе зависания. Также у вертолета в ходе испытаний обнаружился хороший запас против «аэродинамического сваливания», когда угол аэродинамического профиля лопасти относительно окружающего воздушного потока увеличивается до точки, в которой это может привести к дальнейшему увеличению подъемной силы.
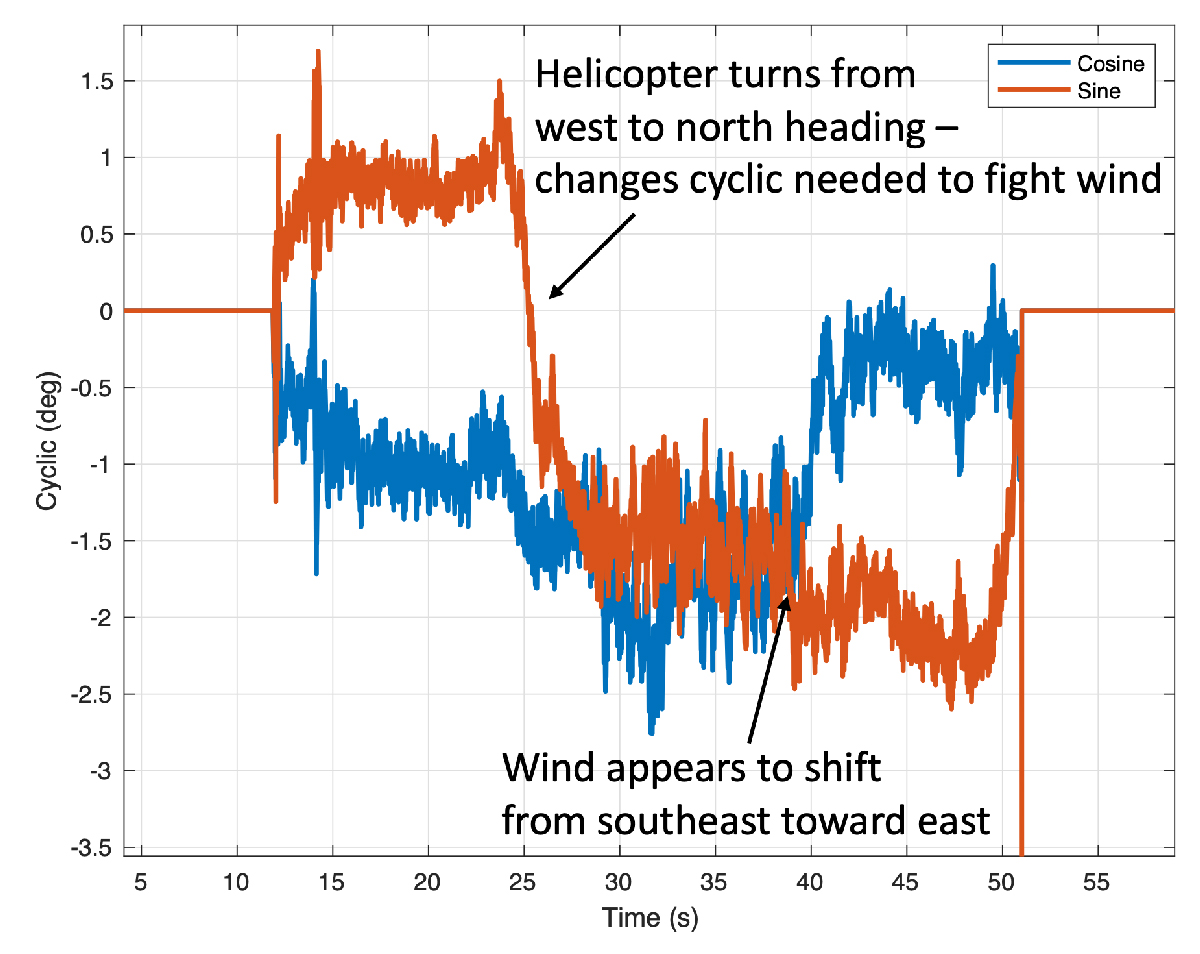
Телеметрия циклического контроля (создания моментов крена и тангажа) углов ротора во время первого полета.
Данные с первых полетов показали, что вертолет после набора высоты начинает прилагать большие усилия для поддержания процесса циклического управления лопастями, что указывает на усиление ветра при удалении от поверхности.
Посадка
Процесс посадки «Индженьюити» занимает несколько секунд. После зависания над местом приземления вертолет устанавливает устойчивую скорость спуска 1 метр в секунду. Затем, когда аппарат фиксирует, что его опоры находятся в пределах 1 метра от поверхности, полетные алгоритмы перестают использовать навигационную камеру и высотомер для оценки ситуации, переключаясь на IMU. Это также позволяет вертолету выполнить плавное снижение вертикальной скорости, чтобы предотвратить аварийную посадку.
Примерно через полсекунды после переключения в режим IMU, когда опоры вертолета находятся в пределах 0,5 метра от поверхности, активируется система подтверждения и обнаружения приземления. Вертолет будет считать, что приземление началось и совершилось, как только его вертикальная скорость будет около 25 сантиметров в секунду и менее. В этот момент система управления полетом прекращает попытки управлять движением вертолета и передает команду для режима «коллективного управления» на минимально возможный шаг лопастей, чтобы создать тягу, близкую к нулю. Затем система ждет 3 секунды, чтобы убедиться, что вертолет находится на поверхности, прежде чем полностью остановить вращение лопастей.
Фактически вертолет касается поверхности с относительно высокой скоростью около 1 метра в секунд. Это сделано, чтобы сократить время работы его систем без датчиков и уменьшить возможный негативный динамический эффект от поверхности при посадке. Конструкция опор шасси вертолета предотвращает его подпрыгивание при приземлении.
Первые полеты показали, что во время снижения в процессе посадки «Индженьюити» сохранял вертикальную скорость с точностью до 4 см в секунду и зафиксировал факт посадки в течение примерно 30 миллисекунд после приземления.
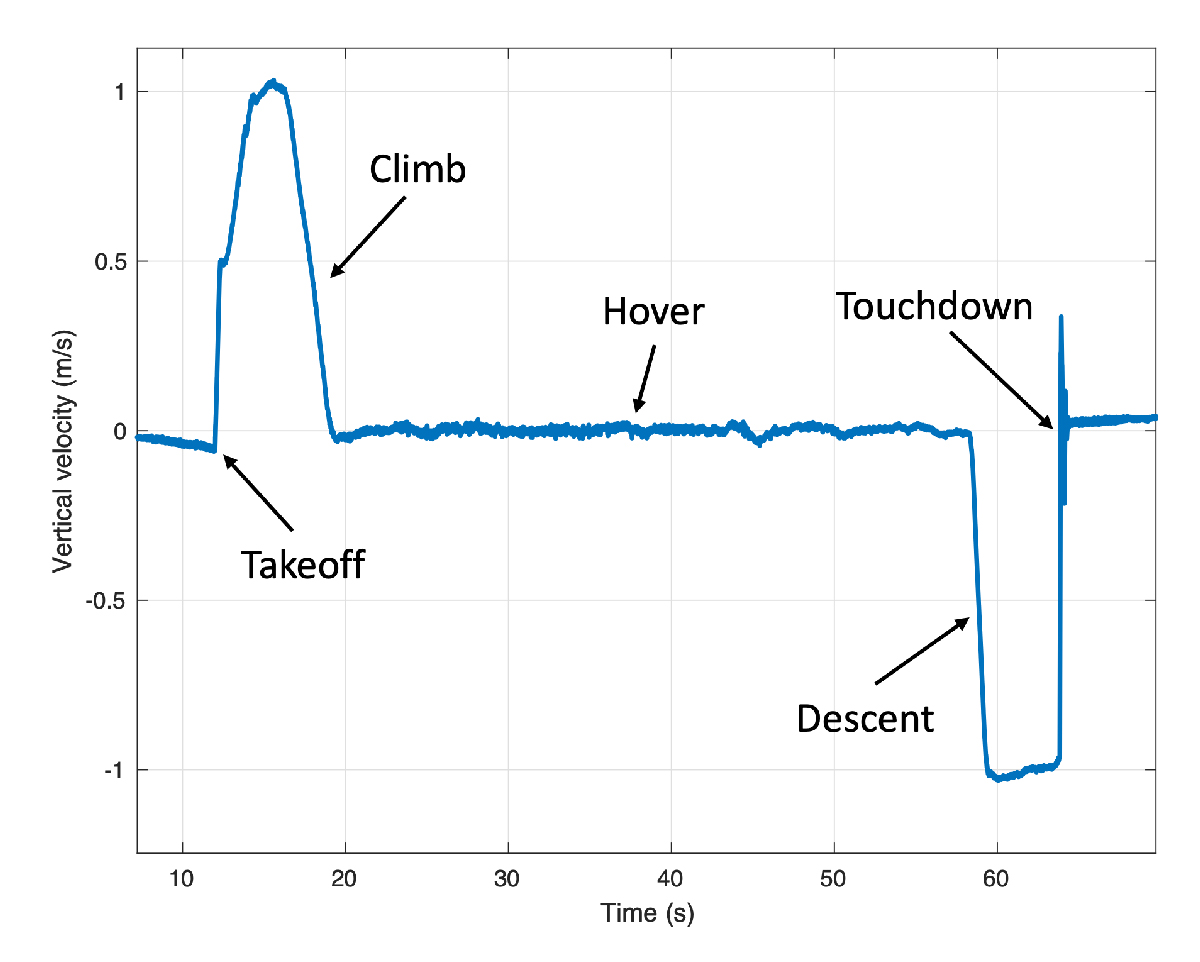
Телеметрия вертикальной скорости во время второго полета.
Кадры третьего полета со стороны марсохода.
Грип пояснил, что марсианский вертолет полностью оправдал и даже превзошел все ожидания НАСА по его расчетным летным характеристикам.
С 20 минуты на этом видео показана отработка автономной системы ориентации вертолета и его телеметрия во время второго полета.
30 апреля 2021 года марсианский вертолет «Индженьюити» успешно совершил четвертый полет, пролетев 266 метров. Пятый полет, финальная точка которого — новое место взлета вертолета, будет через несколько дней. Это будет первый полет, когда «Индженьюити» не вернется на площадку «Поле братьев Райт», а начнет разведку местности.
Andy_Big
Не только полномасштабные. Многие модели вертолетов управляются таким же образом, как главный, так и хвостовой винты. Были отдельные попытки реализовать такое управление и на мультикоптерах, но популярность не обрели — сложно и дорого.
И циклический шаг — это не когда "она лопасть наклоняется вверх, а другая вниз", а когда наклон лопасти зависит от угла поворота ротора :)