
О чём пойдёт речь?
Этой публикацией я начинаю цикл статей о дельта-роботе. Здесь поговорим об истории этого механизма и я расскажу немного об интересных работах по этой тематике. Далее будут материалы, посвящённые его теоретическому анализу, построению рабочей зоны, выбору приводов, конструированию, изготовлению, сборке и созданию системы управления.
Дельта-робот — это манипулятор, придуманный Рэймондом Клавэлем, в конце прошлого столетия. Его выходное звено имеет три поступательные степени свободы. Он относится к механизмам параллельной структуры. Обычные механизмы (не параллельные) представляют собой последовательность звеньев (шарнирный робот, портальный манипулятор). В отличии от них, рабочее звено дельта-робота соединено с неподвижным основанием тремя независимыми кинематическими цепями, а сам механизм воспринимает нагрузку, как пространственная ферма. Это иллюстрирует рисунок ниже.

Основным преимуществом этого механизма выступает высокая скорость манипулирования лёгкими объектами, достигающаяся за счёт того, что тяжёлые приводы расположены на неподвижном основании, а все двигающиеся звенья механизма выполнены из лёгких, зачастую, композитных материалов.
Типовая конструкция дельта-робота представлена на рисунке ниже.

Робот состоит из массивного основания 1, к которому крепятся три привода, изменяющие положения рычагов 2, плоскости вращения которых повёрнуты на 120° друг относительно друга. Каждый рычаг заканчивается двумя трёхподвижными шарнирами. На подвижной платформе 4 также находятся по два трёхподвижных шарнира на каждое из плеч дельта-робота. Плечом для этого механизма будем называть совокупность рычага и двух, соединённых с ним штанг 3. Такую терминологию я выбрал, в других источниках эти звенья могут называть иначе.
Перемещение платформы в заданную точку осуществляется путём поворота трёх рычагов на нужные углы.
Часто говорят о том, что в дельта-роботе используется "принцип параллелограммов".

Две штанги, рычаг и платформа образуют параллелограмм ABCD. Как известно, стороны AB и DC в этом параллелограмме будут всегда параллельны. То есть отрезок DC подвижной платформы будет параллелен плоскости основания. Из-за того, что аналогичные отрезки, относящиеся к двум другим плечам, также будут параллельны основанию, легко сделать вывод, что и плоскость платформы всегда будет параллельна плоскости основания. Для упрощения теоретического анализа этого механизма две штанги заменяют одной (LM), но далее учитывается тот факт, что ориентация подвижной платформы всегда остаётся такой же, как и у основания.
Что почитать/посмотреть по теме?
Начну с того видео, которое вдохновило меня на работы с этим механизмом. Наш соотечественник блогер Alex Korvin Workshop выпустил целую серию видеороликов, посвященных созданию 3Д принтера на базе дельта-робота. В приведённом видео он шикарно описывает историю использования этого механизма в открытых проектах.
Но об одном очень классном проекте он там не упомянул. Проект Delta X начинался, как открытый, а сейчас его авторы (ребята из Вьетнама) делают очень достойных дельта-роботов, которые значительно дешевле промышленных моделей и уже достаточно близки к ним по характеристикам.
Дельта-робот — популярная архитектура манипулятора. Почти каждая крупная фирма имеет представителя этого вида в своём модельном ряде. Вот здесь описывается как раз коммерческая история этого механизма.
Пересказывать информацию из приведённых выше источников мне не хотелось — лучше я всё равно не скажу (покажу), поэтому я лишь сослался на них. Помимо того, на что я уже сослался, у меня скопилось много литературы по этой тематике. Вот ссылка. В папке бардак, но ищущему этого будет большой подарок. А сейчас немного об отдельных работах из этого архива.
Несколько слов, о работах в этом направлении
Существует множество работ, в которых объектом рассмотрения является дельта-робот. Часть из них посвящена изучению вопросов кинематики и динамики этого механизма, часть – конкретным применениям робота и вытекающим из этих применений особенностям его построения, часть – модернизациям механизма, а часть – его проектированию, в том числе и оптимальному.
Фундаментом всех исследований в данной области служат работы, направленные на структурный анализ механизма, решение таких основополагающих задач, как обратная и прямая задачи кинематики и составление матрицы, описывающей переход от скоростей в пространстве обобщенных координат в декартово пространство, то есть составление матрицы Якоби. Эти вопросы широко освещаются тут, тут и тут.
Работы, в которых рассматривается оптимальное проектирование дельта-робота можно ранжировать в порядке возрастания сложности математических моделей, описывающих его работу. Так, в этой работе авторы максимизируют объём куба, который можно вписать в получившуюся для робота рабочую область путём варьирования размеров его звеньев. Чтобы размеры робота не росли до бесконечности, авторы работы вводят так называемое условие нормировки, согласно которому сумма всех параметров, характеризующих механизм, не должна превышать единицу. Работа посвящена общему подходу при оптимизации параллельных механизмов, поэтому многие тонкости, связанные с особенностями дельта-робота не учитываются.
Более широкий подход был реализован авторами вот этой работы. В ней в качестве объекта оптимизации было принято отношение потребляемой мощности системы к сумме масс подвижных компонентов. При синтезе динамической модели все звенья механизма были заменены на сосредоточенные массы, расположенные равномерно на звеньях. Ещё одним достижением данной работы можно назвать учёт резонансных частот конструкции, а также её жесткости и связанные с ними ограничения, используемые при постановке задачи оптимизации.
В работе автор обосновано делает вывод о необходимости решать задачу размерного синтеза дельта-робота, как задачу многокритериальной оптимизации. Автор приводит свое решение, где использует две целевые функции, в которых учитывает равномерность динамических характеристик робота в пределах рабочей области, размер последней, жесткость и массу движущихся частей. В работе большое внимание уделено выведению зависимостей, которые в последствии закладываются в алгоритм оптимизации, а используемая математическая модель проверяется автором в ANSYS.
Итогом работы используемого при расчётах генетического алгоритма является ряд подходящих параметров, описывающих робота, из которых разработчик, уже исходя из своего опыта, должен выбрать наиболее подходящую конфигурацию. Так автором получено 150 различных решений, 3 из которых, представлены в статье. Из последних выбирается третье (рисунок ниже, как то, у которого наблюдается лучшая равномерность характеристик во всех точках пространства, где он будет работать.

Авторами этой работы была проведена колоссальная работа по формализации оптимального проектирования дельта-робота. Исследователи использовали ряд современных подходов для синтеза конструктивных параметров механизма. В область их изысканий попали не только кинематические характеристики, такие как максимальная скорость приводов, но и ряд динамических характеристик и характеристик, связанных с точностью и жесткостью. Таким образом, авторы сформулировали задачу многокритериальной оптимизации, в которой постарались учесть не только теоретические основы работы механизмов подобного класса, но реальные практические моменты, связанные с выбором конкретных технических решений. Так, было проведено решение задачи оптимизации для двух вариантов исполнения рычага: при использовании двутаврового профиля переменного сечения и аналогичного профиля, представляющего собой в сечении эллипс:

В рассматриваемой работе авторы использовали алгоритм NSGA-II, реализованный в MATLAB. Суть расчётов сводится к определению неких индексов TTI и CIE, характеризующих кинематические, динамические и жесткостные характеристики. В работе присутствуют многократные отсылки к работам немецкого учёного Яна Бринкера, ведущего активную научную деятельность по данной тематике. По итогу работы авторы обобщают степень влияния отдельных конструктивных параметров на конкретные характеристики робота и делают вывод о целесообразности применения профиля с эллипсовидным сечением исходя из анализа результатов моделирования.
В работах ????(книжки кликабельны) и ???? рассматривается вопрос вибраций, которые свойственны механизмам, работающим с высокими скоростью и ускорением. Авторами предлагается подход по оптимизации профиля ускорения с использованием генетического алгоритма, учитывающего в своей работе как необходимость снизить вибрации, так и минимизировать ущерб эффективности работы механизма от внесённых в режимы его функционирования изменений.
В работе ???? освещается вопрос настройки приводов дельта-робота, а именно настройки регуляторов серводвигателей. С помощью предлагаемой методики можно подобрать коэффициенты для регулятора, которые обеспечивают ошибку как минимум на 50 % меньше, чем при использовании автонастройщка или Z-N метода. В целом же, подход к управлению приводами хорошо показан в работе ????.
Отдельно стоит сказать о работах, в которых рассматриваются существенные изменения и модернизации конструкции дельта-робота. Часть таких изменений привели к созданию уже совершенно новых роботов. Примером этого служит работа ????, где авторы исследуют дельта-робот с тросовыми приводами. Оригинальные иллюстрации их робота показаны на рисунке ниже.
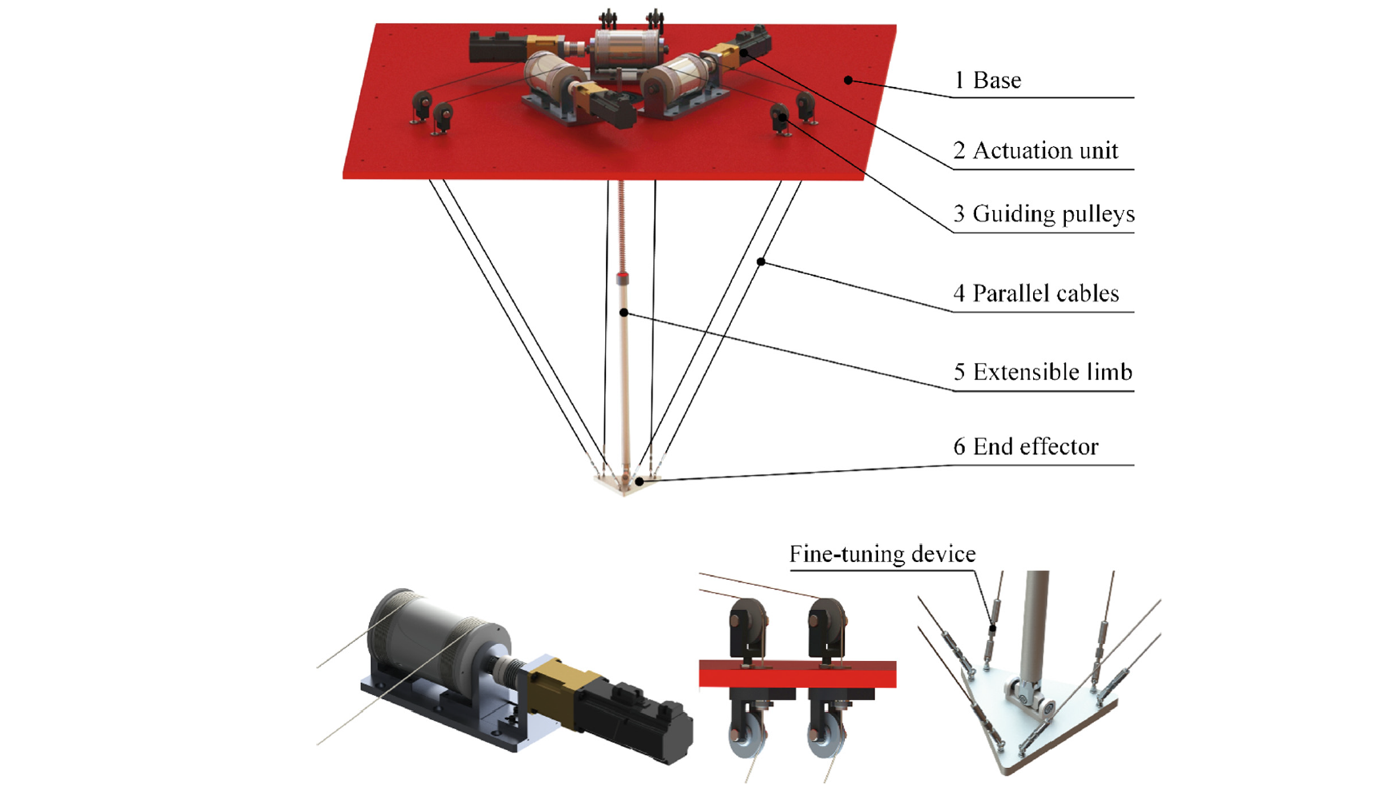
Исследование охватывает весь процесс разработки данного устройства, от анализа рабочей области и оптимального синтеза конструкции робота до создания прототипа и проверки полученных характеристик в эксперименте.
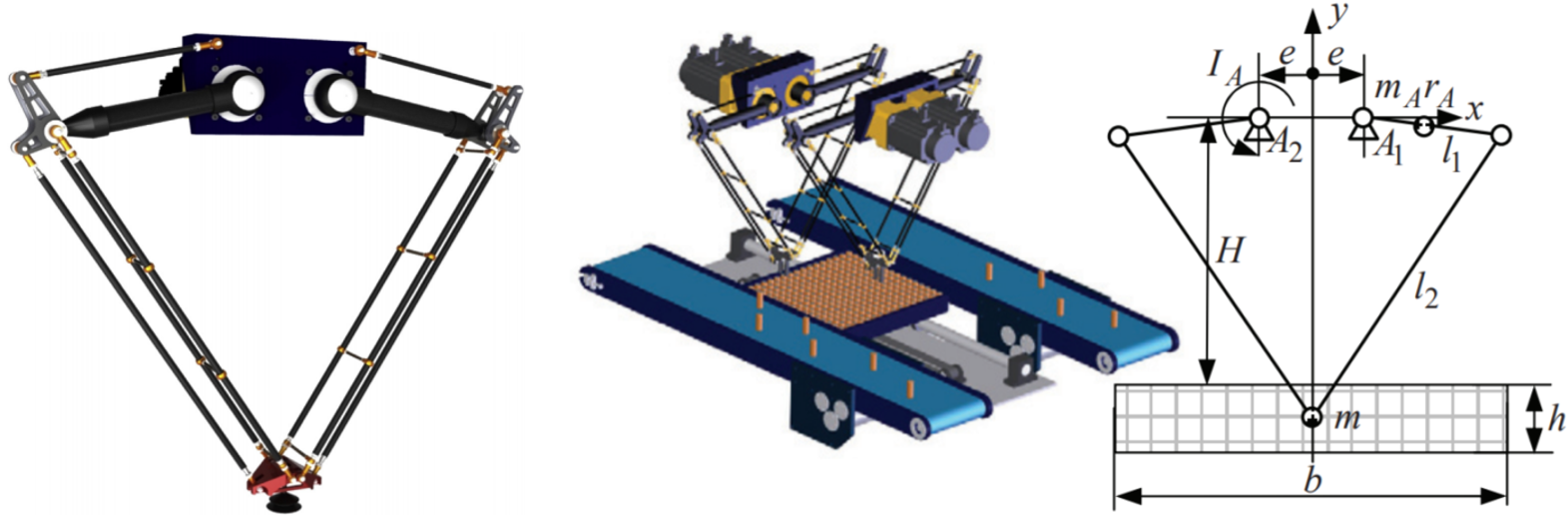
Прообразом дельта-робота можно считать двухподвижного и тоже параллельного робота, выполняющего перемещения объектов в плоскости. Этот механизм тоже нашёл применение в промышленности благодаря своей высокой скорости. Ему посвящено немало работ, среди которых выделим ????, ????, ????, ???? (вы не забыли, что в книжках ссылки?), ???? и ????, в которых рассматриваются как вопросы проектирования, так и вопросы конструктивного исполнения отдельных узлов этого устройства. Некоторые иллюстрации из этих работ приведены на следующем рисунке:
Если идти в другую сторону, то добавив к дельта-роботу 4-ое плечо и модернизировав платформу (выполнив её в виде подвижного параллелограмма, с шарнирами в углах) можно получить уже совершенно нового робота. Такая архитектура его построения получила название Par4. Такой механизм превосходно описан в этой работе. Работа посвящена оптимальному проектированию, но в ней подробно описан и весь путь от идеи до промышленного образца. Для лучшего понимания этой современной конструкции параллельного робота приведём часть иллюстраций из этой статьи:

Такая конструкция, как отмечают авторы, ближе к концепции параллельных механизмов, чем дельта-робот, благодаря распределению нагрузки уже не по трём, а по четырём группам звеньев. Авторы делают заключение о том, что полученные скорости и ускорения и 5,5 м/с и 165 м/с², а также выгодная с точки зрения манёвренности конструкция обеспечивают минимально время цикла среди всех роботов, существовавших на рынке на момент публикации статьи.
В промышленности получили наибольшее применение последовательные и параллельные механизмы. Однако, в последние годы активно ведутся работы в области исследования гибридных механизмов. Пример одного из таких механизмов демонстрируют авторы этой работы. Эта работа посвящена проектированию механизма, состоящего из классического дельта-робота и группы последовательных звеньев, располагающихся на его подвижной платформе. Такой подход позволил получить манипулятор с пятью степенями свободы. В статье авторы решают прямую задачу кинематики геометрическим методом, а обратную задачу матричным методом Денавита-Хартенберга. В работе также проводится моделирование динамики робота посредством решения уравнений Лагранжа в пакете ADAMS с целью получения крутящих моментов на приводах. Завершается работа демонстрацией опытного образца, способного перемещать металлические объекты с точностью 0,1 мм благодаря электромагниту, выполняющего функцию схвата. Авторы делают вывод о перспективности использования подобной гибридной системы для решения задач, в которых требуется осуществить сложную переориентацию перемещаемого объекта. Ряд иллюстраций из этой работы приведён ниже.

Внесение изменений в конструкцию дельта-робота может не только привести к получению совершенно нового механизма, но послужить основой для создания концептуально иной сложной роботизированной системы. Так, на базе двух дельта-роботов учёные разработали 6-и осевое тактильное устройство, предназначенное для удалённого управления какими-либо устройствами. Чтобы понять конструкцию этого девайса, приведём его модели и фотографии:
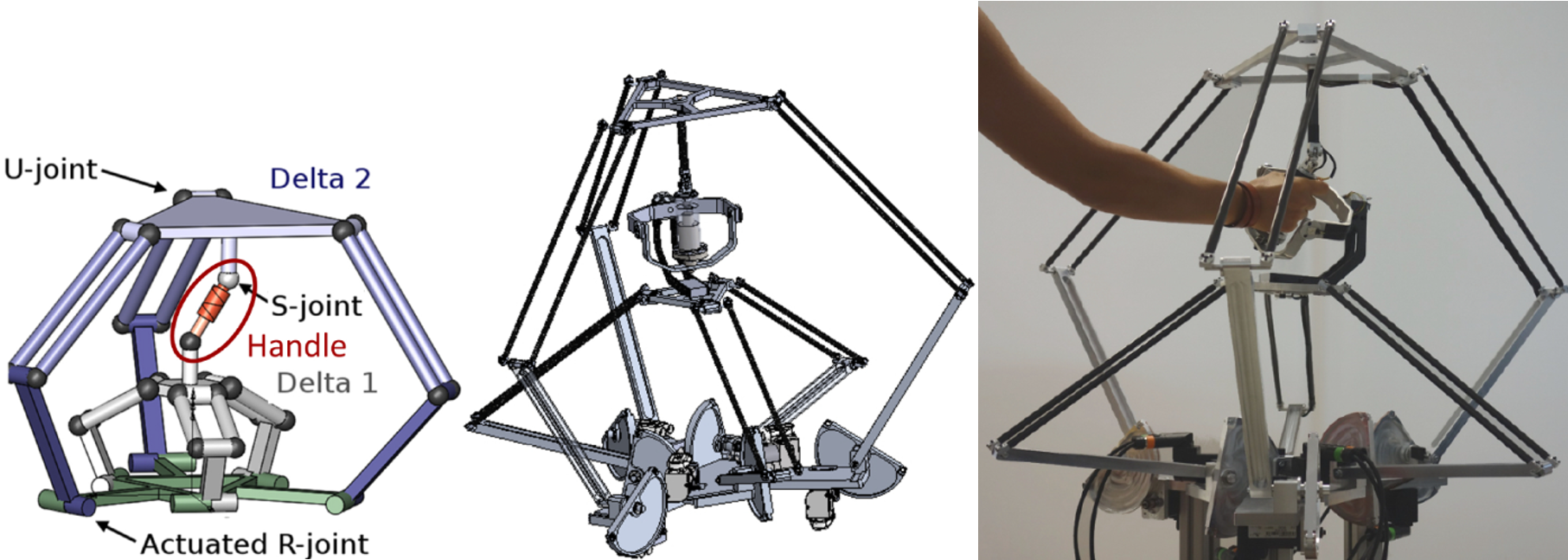
Полученное устройства обладает силовой обратной связью, что позволят как повысить качество управления в целом, так и управлять с его помощью коллаборативными роботами.
Такое объединение дельта-роботов позволило получить полностью параллельную систему со сравнительно простыми моделями для вычисления положения и генерации силовой обратной связи. Высокая жесткость, малая инерционность, большая рабочая область без сингулярностей – вот главные характеристики полученного устройства, отмеченные авторами. Геометрические параметры робота получены путём решения задачи оптимизации с 2-мя целевыми функциями, а элементы приводов выбирались исходя из моделирования динамики и технологических аспектов.
Ценность такого механизма, как дельта-робот, наиболее полно раскрывается в контексте возможности его применения в промышленности. Наибольшее распространение робот получил в области упаковки, в пищевой и в подобных ей отраслях промышленности, где масса перемещаемых объектов, как правило, мала. Однако, в последнее время можно встретить ряд достаточно необычных примеров адаптации этого механизма к новым для него задачам. К примерам подобных новшеств стоит отнести самого миниатюрного на сегодняшний день представителя этой архитектуры, разработанного исследователями из Гарвардского университета. Робот «milliDelta» (о нём говорится в 1-ом, рекомендованном мной, ролике) имеет размеры всего 15 мм × 15 мм × 20 мм и способен перемещаться по замкнутым траекториям с частотой 75 Гц, развивая скорость до 0,45 м/с с ускорением до 215 м/с². Сам робот весит всего 430 мг, но способен перемещать объекты с массой 1,31 г. Такое отношение полезной нагрузки к массе самого робота недостижимо для его старших собратьев и является следствием тех технических решений, которые использовались при его конструировании. Подробнейшим образом, как сама конструкция, так и методика проведение экспериментов описаны в работе. При построении робота широко использовалась технология производства печатных плат и MEMS технологии, в качестве приводов источников движения были выбраны пьезоэлектрические приводы. В конструкции использованы лишь одноподвижные кинематические пары, выполненные в виде гибких полимеров. Конструкция продемонстрирована на рисунке ниже.
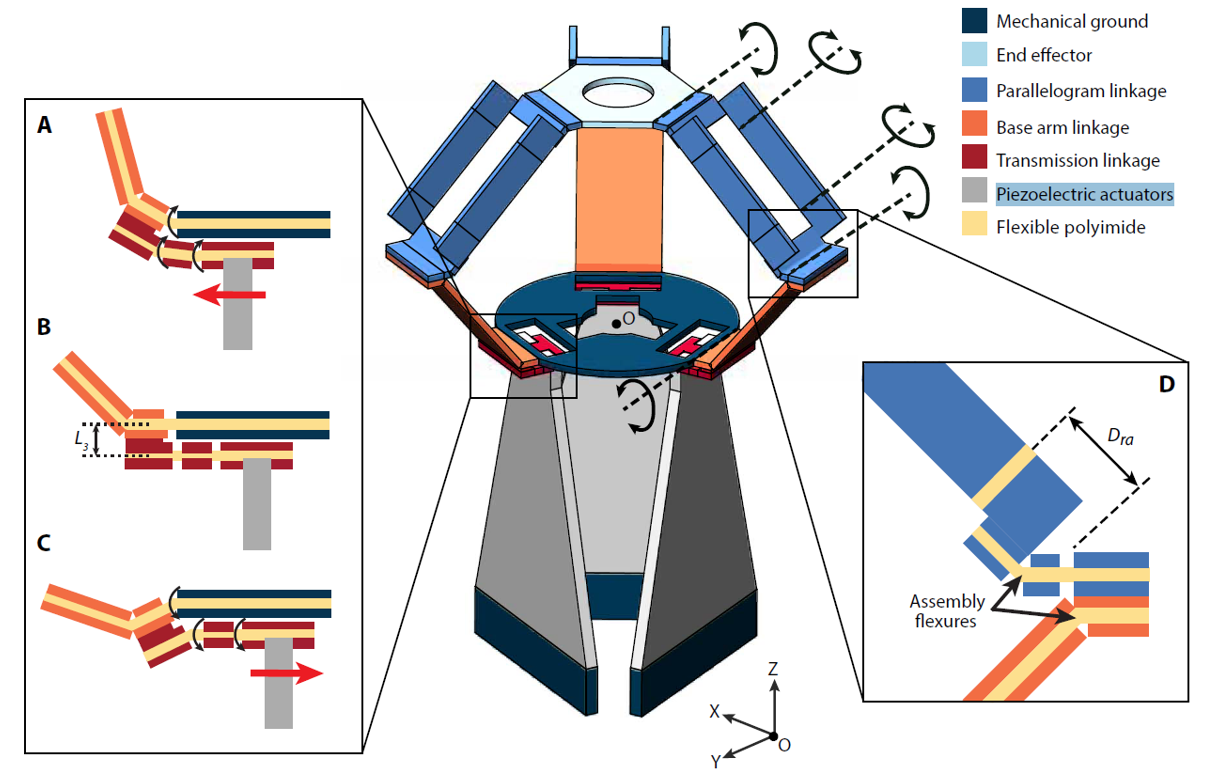
Точность и скорость этого робота удалось измерить благодаря использованию двух высокоскоростных видеокамер, производящих съёмку робота с разных ракурсов. Удалось получить точность около 5-и мкм в рабочем пространстве объёмом около 7-и мм³. В исследовании делается вывод о перспективности использования этого робота в таких областях, как микрохирургия, микросборочные операции и просто в перемещении объектов в миллиметровом диапазоне.
Ещё одним интересным примером применения дельта-робота делятся авторы работы ????. Исследователи спроектировали и создали дельта-робота на подвижной тележке для применения в сельском хозяйстве. Это устройство способно двигаться вдоль грядки и производить точечную обработку почвы, будь то прополка или направленное опрыскивание сорняков или полезных растений. Вот видео, но не знаю, их ли это разработка. Работа представляет большой интерес как с точки зрения синхронизации движений тележки, манипулятора и машинного зрения, так и с точки зрения проектирования манипуляционной системы и построения системы управления, планирования движения. Особенно ценно, что авторы прослеживают весь путь от решения основных задач, связанных с кинематикой робота, до их применения в системе управления и проверке на реальном устройстве. Как и в предыдущем повествовании, приведём ряд иллюстраций из этой работы:

В качестве ещё одного яркого примера реального промышленного применения рассматриваемого механизма можно привести работу ????, в которой автор адаптирует этот механизм к работе на предприятии по производству продуктов из курицы и проводит большую работу по формализации этого вопроса.
Надеюсь кому-то подкинул нужной информации, а кто-то просто потратил своё время не на просмотр телевизора, а получение новых знаний в области робототехники. Дальше уже обстоятельно поговорим о дельта-роботе, разработаем и сделаем эту чудо машину.
MayakOV
А вот такого дельта-робота можно использовать в качестве ног шагающей платформы?
Спойлер
multiengineer Автор
Я видел такое применение, но это не рациональное использование возможностей дельта-робота. Механизму приходится поднимать своё тяжёлое основание, что напрочь "убивает" его достоинства. Лучше выбрать что-то другое. Если очень хочется, то уж тогда лучше такую конфигурацию механизма рассмотреть https://www.youtube.com/watch?v=bzeSp97w8v4&t=64s
multiengineer Автор
https://ir.canterbury.ac.nz/bitstream/handle/10092/6628/Wong_Thesis.pdf;sequence=1 Вам на страницу 17.