

Существует огромное количество примеров и статей про Windows 10 IoT Core, рассказывающих о том, как легко и удобно делать с его помощью разнообразные устройства. Однако в реальности работа с любым "железом" всегда связана со множеством не самых очевидных нюансов, знание которых приходит только с практикой. Я расскажу о некоторых особенностях работы c GPIO на Raspberry Pi2 и Windows 10 IoT Core и заодно о новой функции Remote Client, доступной в версии Insider Preview.
Началось все с того, что мне нужно было получить номер карты со считывателя системы СКУД (контроля доступа). Почти все считыватели умеют передавать эти данные по интерфейсу Wiegand. Он представляет собой 3 провода: сигнальный для передачи единиц, сигнальный для передачи нулей и земля. В режиме ожидания на каждом сигнальном проводе устанавливается 5В. Данные передаются "обратными" импульсами. Ширина импульсов от 50 до 200 мкс, период от 300 до 3000 мкс:
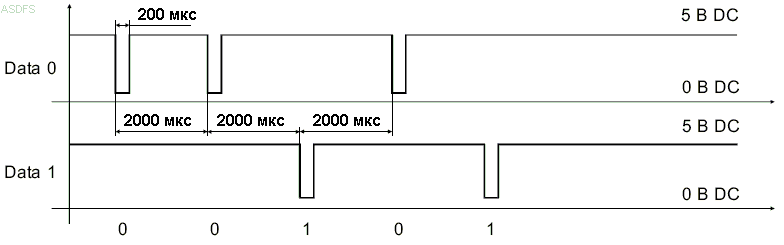
Данные идут всегда в одну сторону от считывателя к контроллеру. Количество бит может варьироваться и их интерпретация тоже может быть разной. Окончание посылки определяется тайм-аутом от 50 до 250 мс.
Такой разброс параметров произошел потому, что это "исторически сложившийся" интерфейс, который не имеет четкого стандарта.
Мне досталось устройство с протоколом wiegand26 — посылка в нем содержит 26 бит, в которых 2 бита контроля четности.
Задание было дано в рамках создания демонстрационного стенда, так что можно было поэкспериментировать с платформой. Поэтому очень кстати пришлась Raspbery Pi2 с Windows 10 IoT Core на борту.
Проблемы с GPIO
Решить эту задачу можно двумя способами:
- использовать прерывания при изменении напряжения на пинах
- использовать опрос пинов
Самым простым мне показался первый вариант. Правильно инициализировав пины, можно не грузить процессор постоянным опросом, а отрабатывать только асинхронные вызовы. Код тут очень прост:
var gpio = GpioController.GetDefault();
var data0 = gpio.OpenPin(data0Pin);
var data1 = gpio.OpenPin(data1Pin);
// Check if input pull-down resistors are supported
if (data0.IsDriveModeSupported(GpioPinDriveMode.InputPullUp))
data0.SetDriveMode(GpioPinDriveMode.InputPullUp);
else
data0.SetDriveMode(GpioPinDriveMode.Input);
if (data1.IsDriveModeSupported(GpioPinDriveMode.InputPullUp))
data1.SetDriveMode(GpioPinDriveMode.InputPullUp);
else
data1.SetDriveMode(GpioPinDriveMode.Input);
var ticksPerMillisecond = TimeSpan.TicksPerMillisecond;
var tenMs = ticksPerMillisecond / 1000; //1 микросекунда
data0.DebounceTimeout = TimeSpan.FromTicks(tenMs);
data0.ValueChanged += data0_ValueChanged;
data1.DebounceTimeout = TimeSpan.FromTicks(tenMs);
data1.ValueChanged += data1_ValueChanged;Сразу нужно сказать про DebounceTimeout. Вообще он тут не нужен, так как, как правило, при нормальной работе интерфейса без существенных наводок "дребезга" в нем нет. Но из-за того, что в общем случае мы не знаем, с каким считывателем и в каких условиях будет все это работать, то я решил поэкспериментировать с этим таймаутом.
Но ничего хорошего из этого не получилось. В примерах DebounceTimeout везде задается в миллисекундах, но для моего случая нужны микросекунды. Какое бы значение я не устанавливал, события ValueChanged не появлялись. Поэтому таймаут пришлось просто отключить, и все стало работать нормально:
data0.DebounceTimeout = TimeSpan.FromTicks(0);
data0.ValueChanged += data0_ValueChanged;
data1.DebounceTimeout = TimeSpan.FromTicks(0);
data1.ValueChanged += data1_ValueChanged;Данные считывались так:
private void data0_ValueChanged(GpioPin sender, pioPinValueChangedEventArgs e)
{
if (e.Edge == GpioPinEdge.FallingEdge)
{
UpdateValue(0);
}
}
private void data1_ValueChanged(GpioPin sender, pioPinValueChangedEventArgs e)
{
if (e.Edge == GpioPinEdge.FallingEdge)
{
UpdateValue(1);
}
}Затем пришла пора решать вопрос с моментом окончания посылки. Как я писал выше, окончанием посылки считается отсутствие импульсов на обоих сигнальных контактах в течение минимум 50 мс. Тут отлично подошел бы таймер, который бы регулярно проверял, был ли обмен, и если нет, то отправлял бы полученный результат дальше.
Такой подход работал плохо. Я использовал ThreadPoolTimer, так как код должен был работать и без UI. Особенностью этого таймера является то, что каждый раз его обработчик вызывается в новом потоке. Если обработчик выполняется дольше периода таймера, то параллельно будет запущен еще один, а потом еще один, и так далее. При этом в нашем случае, в обработчике таймера должны быть сброшены данные, чтобы начать новый прием. Поэтому он является критической секцией и не должен выполняться одновременно более чем в одном экземпляре. Соответственно, короткие интервалы таймера использовать было нельзя.
Далее оказалось, что и длинные интервалы тоже нельзя использовать, как и синхронизацию обработчика через lock, так как пока выполняется обработчик таймера, перестают приходить события ValueChanged от портов. Похоже, что эти события менее приоритетны, чем обработчики таймеров. Причем эксперименты показали, что события не висят в очереди, а просто молча отбрасываются.
Поэтому, как ни крути, использование таймера приводило к потере событий от GPIO и, как следствие, потере данных. Их можно было уменьшить путем подбора периода таймера и перераспределения вычислений на ValueChanged. Но абсолютной надежности достичь с таким подходом нельзя даже теоретически. Кроме того, выяснилось, что к пропуску событий и потере данных ведет и слишком долгое выполнение ValueChanged.
Я решил использовать вместо таймера поток. Для синхронизации применялась queue, в которую складывались пришедшие в ValueChanged биты. Поток должен некоторое время спать, затем проверять, был ли обмен за это время, и если не было, то забирать биты из очереди, собирать из них результат и отправлять дальше.
Но и тут ничего не вышло. Можно было предположить, что ValueChanged не будет вызываться при работе потока, но вот то, что он не вызывается, когда поток спит, для меня оказалось сюрпризом. В качестве аналога Thread.Sleep я использовал Task.Delay. Не знаю, происходит ли при этом выполнение других Task'ов (судя по документации, Delay запускает еще один Task с таймером), но события от GPIO это все наглухо блокирует.
В общем, драйвер GPIO для Windows 10 IoT написан так, что его почти невозможно использовать асинхронно, так как его события имеют кране низкий приоритет в системе.
Lightning
В процессе изучения работы с GPIO я узнал, что существует еще один, более быстрый драйвер, который можно использовать на Windows 10 IoT Core. Называется он Lightning и включает в себя не только GPIO, но и работу с ADC, I2C, PWM, SPI. Быстрота работы достигается за счет "прямого доступа к памяти"(direct memory access).
Драйвер находится на стадии preview, но уже включен в версии Windows 10 IoT Core Insider Preview. Использовать его стоит тем, кому не хватает скорости работы стандартного драйвера. Я же надеялся тут получить более приоритетный ValueChanged.
По ссылке выше есть инструкция, как его использовать, НО, просто так он не заработает. Проблема заключается в NuGet пакете. Все устанавливается, но до namespace Microsoft.IoT.Lightning.Providers достучаться невозможно. Причем единственное упоминание о том, что проблему нельзя побороть, я нашел в этой статье. Автор рассказывает как управлять светодиодами. В частности, он столкнулся с медленной работой PWM и исправил ситуацию с помощью использования Lightning.
Выглядит оно так:
Third, you'll need to reference the Lightning SDK. According to the documentation, you just reference via NuGet. Unfortunately, this doesn't work as of v1.0.3-alpha. I had to download the Microsoft.IoT.Lightning.Providers C++ source, add the Microsoft.Iot.Lightning.Providers.vcxproj project to my solution, and then make a project reference.
Incidentally, I contacted some folks at Microsoft, and they said a new nuget will be published shortly with binaries that will fix this issue.Мне помог способ, описанный в статье. Я тоже скачал исходники, добавил в Solution файл проекта и сделал на него Reference. И какого же было мое удивление, когда оказалось, что события ValueChanged в Lightning не реализованы...
После этого я бросил идею использовать асинхронный подход и решил сделать опрос пинов в цикле.
UPDATE: В процессе решения задачи я задал разработчикам вопрос по поводу ValueChanged. Они ответили, что скоро все сделают. И свое обещание они выполнили.
Кроме того, в NuGet появилась Microsoft.IoT.Lightning.Providers 1.0.0, которая делает видимым namespace Microsoft.IoT.Lightning.Providers.
Решение задачи
В итоге задачу удалось решить путем создания цикла с периодом опроса пинов в 10 мкс. Сначала были опасения, что может не хватить скорости, но оказалось, что все работает достаточно быстро даже на стандартном драйвере.
Код выглядит примерно так:
_data0 = gpio.OpenPin(data0Pin, GpioSharingMode.Exclusive);
_data1 = gpio.OpenPin(data1Pin, GpioSharingMode.Exclusive);
if (_data0.IsDriveModeSupported(GpioPinDriveMode.InputPullUp))
_data0.SetDriveMode(GpioPinDriveMode.InputPullUp);
else
_data0.SetDriveMode(GpioPinDriveMode.Input);
if (_data1.IsDriveModeSupported(GpioPinDriveMode.InputPullUp))
_data1.SetDriveMode(GpioPinDriveMode.InputPullUp);
else
_data1.SetDriveMode(GpioPinDriveMode.Input);
_task = Task.Run(() => TaskHandler());Чтобы не блокировать выполнение других потоков, цикл сделан внутри Task:
private void TaskHandler()
{
var ticksPerMillisecond = TimeSpan.TicksPerMillisecond;
var mks = ticksPerMillisecond / 1000; //1 микросекунда
while (!_stopTask)
{
Task.Delay(TimeSpan.FromTicks(mks*10)).Wait();
var dt0 = _data0.Read();
var dt1 = _data1.Read();
.....
}
}Работает стабильно, но при условии, что карточки к ридеру подносятся не чаще чем 1 раз в секунду.
Данный проект со всеми инструкциями о подключении ридера к Raspberry Pi2 я планирую через пару недель выложить на GitHub.
Remote client
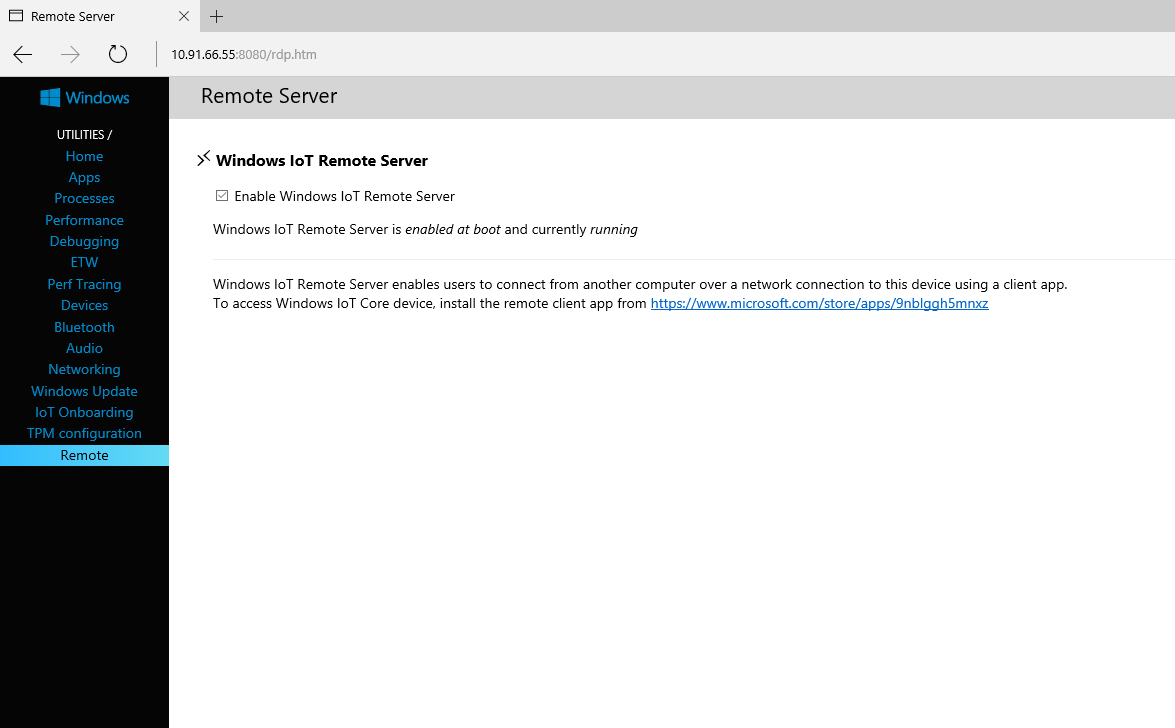
Многие разработчики, пользующиеся Windows 10 IoT Core, отмечают, что им очень не хватает удаленного рабочего стола. Монитор или телевизор не всегда есть под рукой, да и пользоваться ими не всегда удобно. Наконец этот пробел был закрыт и, начиная с версии 10.0.14295.1000, появился удаленный клиент. Сейчас эта и более новая версия доступны как Insider Preview.
Работает все очень просто. На стороне Windows 10 IoT Core нужно разрешить подключение удаленного клиента в веб интерфейсе:
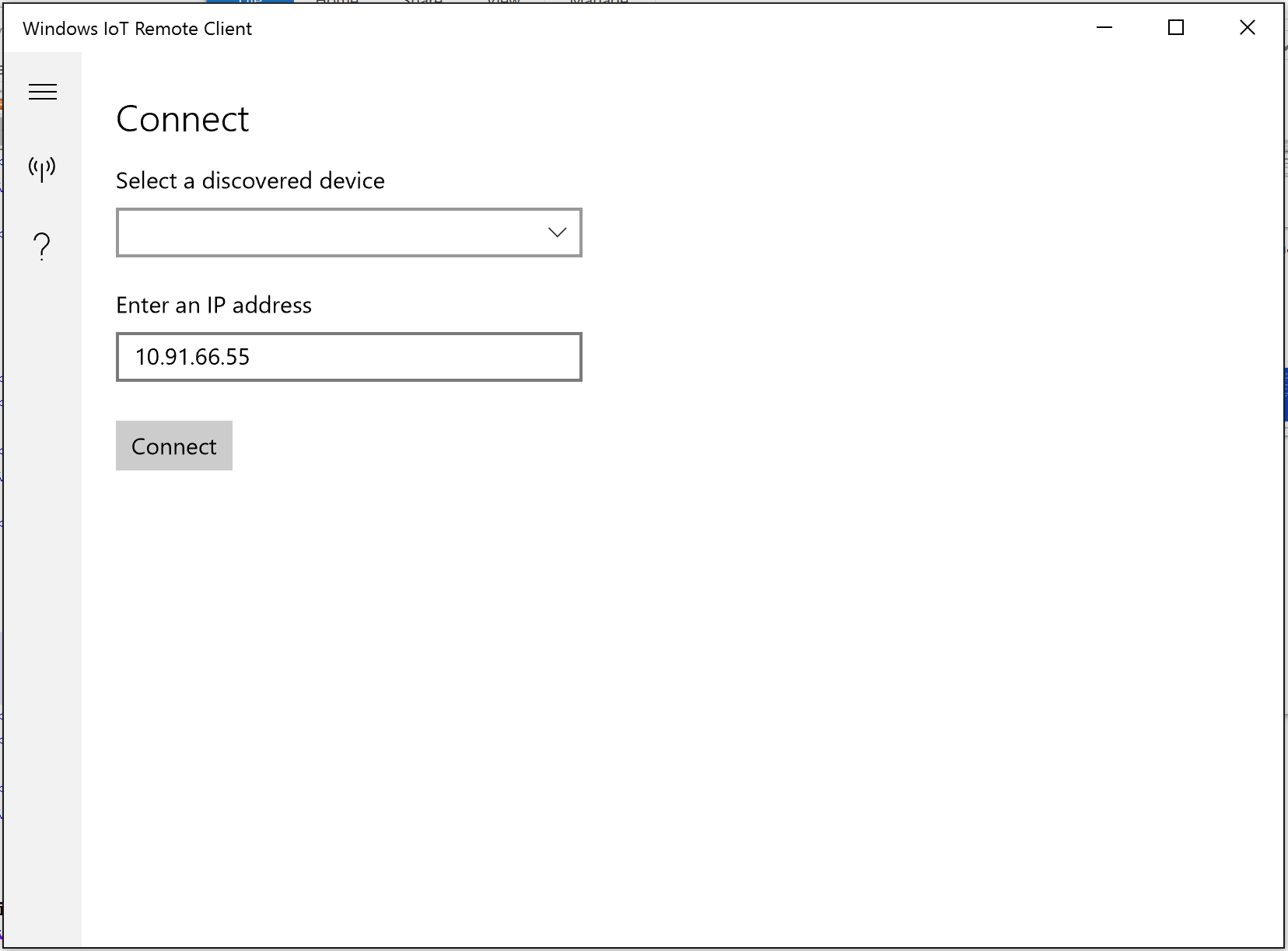
Установить сам клиент

Запустить его и подключиться с Windows IoT Core
В инструкции указано, что все хорошо работает на Raspberry Pi 2 и 3, Minnowboard Max и Dragonboard. При этом на Pi2 производительность немного ниже, так как там отсутствует поддержка GPU.
У меня как раз была Rapberry Pi2.

Небольшие задержки есть, но, на мой взгляд, они не критичны. При этом работает все стабильно и без проблем.
Выводы
Подводя итог всему вышесказанному, отмечу, что Windows 10 IoT Core работает не всегда так, как может ожидать от нее человек, привыкший к микроконтроллерам. Все-таки это полноценная операционная система, которая достаточно сильно абстрагируется от "железа":
- Приоритет событий от GPIO крайне низкий. Да и механизм событий не совсем понятен.
- Сложности с асинхронным программированием, непосредственно не связанные с работой прерываний.
- Существующего функционала не всегда хватает, а тот, что представлен в виде preview, не всегда корректно работает. Хотя развивается все это очень быстро.
- Производительности Windows 10 IoT Core вполне хватает для задач, чувствительных ко времени выполнения. При этом есть еще запас в виде Lightning.
- Появился Remote Client, что существенно повысило удобство работы.
Комментарии (20)

NelSon29
10.05.2016 11:22+1Александр, у вас нет возможности посмотреть, поддерживает ли Lightning работу SPI в качестве slave?
Нужен адаптер для чтения информации по SPI с внешней платы-мастера в пк. На примете RasPI, но сам по себе он поддерживает slave только с какими-то дикими костылями, в которые себе дороже лезть. Заранее спасибо
AlexandrSurkov
10.05.2016 11:47Lightning реализует стандартные UWP spi интерфейсы. Поэтому, если там slave нет(а его похоже там нет), то и в lightning тоже нет. Более точно смогу попозже сказать, когда доберусь до компьютера.
NelSon29
10.05.2016 12:05Судя по ответу на stackoverflow и документации, в RasPI всё же есть аппаратная возможность SPI-slave, просто не написан драйвер.
И да, по вашей ссылке речь идёт о MinnowBoardMax, а это совсем другая плата. Скорее всего, и для RasPI не стали возиться с драйвером, но вдруг.
DrAleck
10.05.2016 17:18Интересно, удастся ли общаться полноценно по скайпу удаленно, по RDP?
AlexandrSurkov
10.05.2016 17:18Не совсем понимаю о чем вы.
DrAleck
10.05.2016 17:40Подымаем windows 2012, устанавливаем роль удаленных сеансов (терминальный сервер), ставим туда skype, к малинке подключаем наушники и микрофон (возможно через копеечную внешнюю usb звуковуху на cmedia), подключаемся к терминальному серверу с пробросом аудио.
rPman
10.05.2016 21:29Не пойму, что, где и как в такой схеме вы хотите соптимизировать? Цена решения какая то неадекватная получается, из-за софта.
DrAleck
10.05.2016 21:41Соптимизировать? Ну, как минимум, на десктопах. Windows 10 IoT Core бесплатный же, как я понял. Сейчас несколько рабочих мест перевел на малинки. Работают в raspbian, соединяются через freerdp/rdesktop. Правда сервак 2003. Думаем переезжать на 2016, но очень хочется завести skype.
AlexandrSurkov
11.05.2016 12:33На Windows 10 IoT нет встроенной поддержки RDP, в отличие от той же raspbian.
DrAleck
11.05.2016 12:42Ой, точно. Я прочел про remote client и удаленный рабочий стол и сразу, почему-то, решил, что это RDP клиент. Уже обрадовался. Эх, жаль. Спасибо, что прояснили.
rPman
11.05.2016 13:02Оно временно бесплатно!
Тем более, вне зависимости от редакции, microsoft переведет windows 10 операционные системы на способ оплаты 'по подписке'
Мало того что построив инфраструктуру на windows вы получаете нечто по непонятной цене в будущем, так еще и зря, так как открытые и действительно бесплатные решения вашу задачу выполнят как минимум не хуже (исключения RemoteFX, и трансляция видео, но думаю это вопрос времени).DrAleck
11.05.2016 14:44>>так как открытые и действительно бесплатные решения вашу задачу выполнят как минимум не хуже
Ну альтернативу windows rds я вижу только ltsp. Сейчас у нас почти все сидят freerdp/rdesktop либо на десктопах переделанных под «тонкий клиент» с загрузкой thinstation (и готовые образы, и сами собирали), либо на малинках. Есть несколько «толстых» мест с Linux (mint, ubuntu, fedora различных версий). Тоже freerdp. И одна машина под windows xp.
Стабильнее всего ведет себя сессия через XP, затем raspbian и самый «проблемный» — thinstation. Возможно, конечно, что с LTSP это все будет работать менее глючно, НО! Опять же 1С8 (файловая), опять же MS office, опять же бухгалтерский софт, заточенный под винду. Тут ubuntu сама по себе регулярно сообщает, что системный процесс только что умер (типа cupsd) и это при том, что на этом компе только лазят в инете и скайпе. Вся работа в удаленном сеансе. Представляю какой ужас может ждать на ltsp.
Да, можете упрекнуть, что «да вы просто не умеете правильно готовить (linux)»… возможно. Но если linux надо «допиливать» только, что бы он сам по себе не падал, то что же говорить, если на нем надо будет развернуть что-то «любящее windows».
В общем к сожалению пока альтернативы RDS мы не нашли. Да, дорого. Офис вообще ужас, потому будем брать какую-то подписку Office 365, чтобы снизить финансовую нагрузку. В принципе, был бы рад, если бы кто-то поделился своим опытом. Может и вправду я не туда копаю или чего-то не знаю?rPman
11.05.2016 19:32Да, открытые решения глючные, особенно во всем что отлично от передачи изображения и кнопок с мышкой (типа принтер, шары, авторизация..) с другой стороны, как раз под каждый случай эти решения так же можно заменить на альтернативы.
Да, решение может получиться не бесплатным, но деньги пойдут грубо говоря в свой отдел администрирования а не куда то наружу, создавая свой людской ресурс.

rumatavz
11.05.2016 15:03То что вы пишите — очень странно! Как один лишний работающий поток блокирует все IO на 4ядерной железке.
Может быть дело в другом? В первом примере у вас gpio, data0 и data1 должен сожрать сборщик мусора(и событие никогда не приедет), а во втором (с Lightning) не должен тк вы переделали на поля, вместо локальных переменных.
Может в этом дело?AlexandrSurkov
13.05.2016 14:50В статье фрагменты когда, и о сборщике мусора не стоит по ним судить. Да и сборщик мусора не уничтожит класс, на события которого есть ссылки.
Проблема не в потоках, а в низкоуровневом драйвере gpio и его приоритете над потоками.

dmitry_dvm
Remote Client порадовал, крайне нужная вещь.