
Российские команды из Владивостока (ДВФУ и МГУ им. Невельского) много раз занимали призовые места.
Предыдущие публикации:
- Подводные беспилотники: от поиска термоядерных бомб до студенческих соревнований.
- Подводные беспилотники: Правила студенческих соревнований Robosub 2017.
Сегодня — обзор аппаратов-победителей 2017 года с некоторыми комментариями от наших участников.
1-е место: Cornell University, USA.
2-е место: Far Eastern University/Institute for Marine Technology Problems, Russia.
3-е место: National University of Singapore, Singapore.
4-е место: Harbin Engineering University, China.
5-е место: Georgia Institute of Technology, USA.
Первое место
«Артемида» и «Аполлон» из Cornell University.

Сайт
Публикация в журнале соревнований (PDF)
Команда:

Аппарат:
Большое изображение
{kind=link}
Видео:
Рассказывает Максим Спорышев, участник российской сборной:
Cornell — это самая крутая команда в истории этих соревнований. Часто бывает, что крутые команды «заканчиваются», когда выпускаются лучшие их составы, но у этой есть преемственность.
Они побеждали лет 5 подряд, в то время, когда наша команда только становилась. Было удивительно наблюдать, как они не выходили в финал в предыдущие пару лет.
У них очень качественный и профессиональный подход. Команда состоит примерно из 30 человек, есть большая команда менеджеров, которая организовывает различные мероприятия, ищет спонсоров, занимается пиаром.
Крутая команда креативных и талантливых инженеров, которые весь год готовят аппарат, тестируют его, разрабатывают новые конструкторы.
Мы знаем некоторых выпускников оттуда (некоторые из них даже русские), они работают в очень крутых местах (Qualcomm, Microsoft и т.д.)
Программисты там тоже придумывают много интересных штук и, главное, работают в течение всего года.
У них даже видео снимаются с качеством коммерческих роликов.
Помню в 2014 году в дедлайн за месяц до соревнований все команды выкладывали видео ролики, мы тогда как обычно только начинали тестировать все в бассейне. А на видео Cornell они выполняли вообще все заданий под эпичнейшую музыку, рассказали как круто они готовились и что они «more than ready for Robosub».
Конечно, в тот год они приехали и каждый день выполняли все или почти все задания и победили с огромным отрывом.
Их команда на соревнования приезжает не в полном составе, слишком их много. Ходят каждый день в разных командных футболках, с кучей спонсоров на спинах. У них среди спонсоров кажется даже была пиццерия Domino's Pizza, и кажется, в их команде был чувак, который отвечал за пиццу и маффины каждый день.
В общем в этой команде круто абсолютно все. Похожий уровень был только у BumbleBee.
Тем не менее, у BumbleBee каждый год какие-то совершенно дурацкие проблемы происходили в основном с оборудованием (сгорел сонар, умер компас, умер движок), из-за которых они провально выступали в финале. Хотя на многих тренировках они выполняли практически все.
У Cornell такого не было в основном, однако обстоятельства даже им мешали не только побеждать, но и выходить в финал. В частности с солнечной погодой в 12-14 часов дня до сих пор никто бороться не могут. Даже этим летом у Cornell было худшее выступление за неделю именно на финале, когда в первый раз за эту самую неделю вылезло палящее солнце.
Закончилось все тем, что нас от них отделяли около 500 очков. Мы могли случайно врезаться в буек нужного цвета, чтобы их опередить =). Получилось бы, конечно, очень несправедливо по отношению к ним и их уровню подготовки.
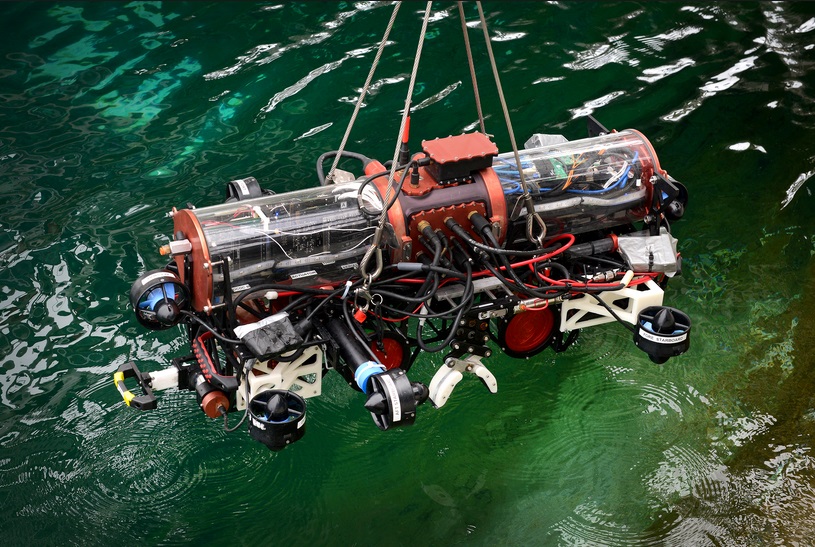
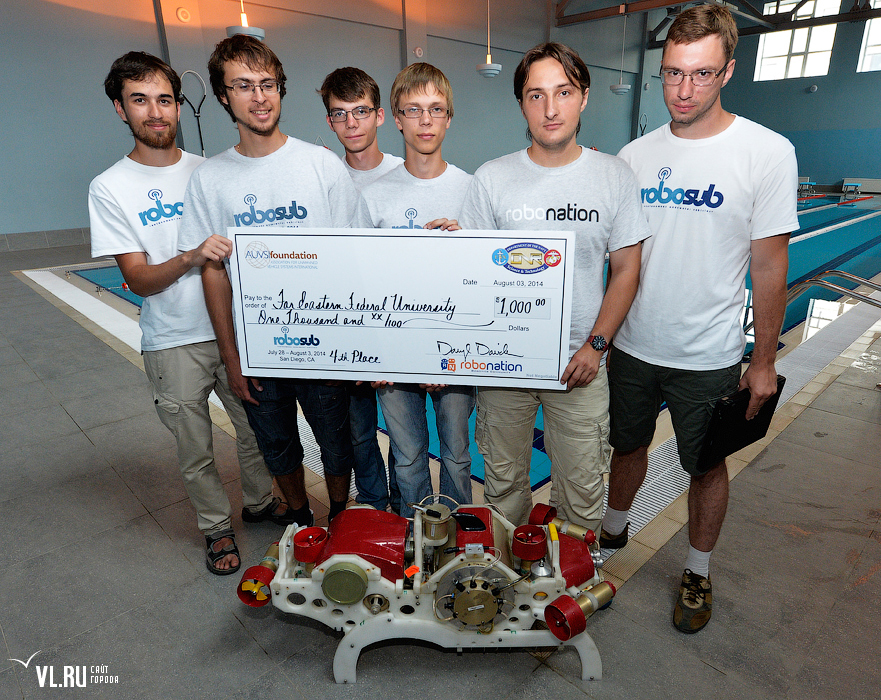
Второе место
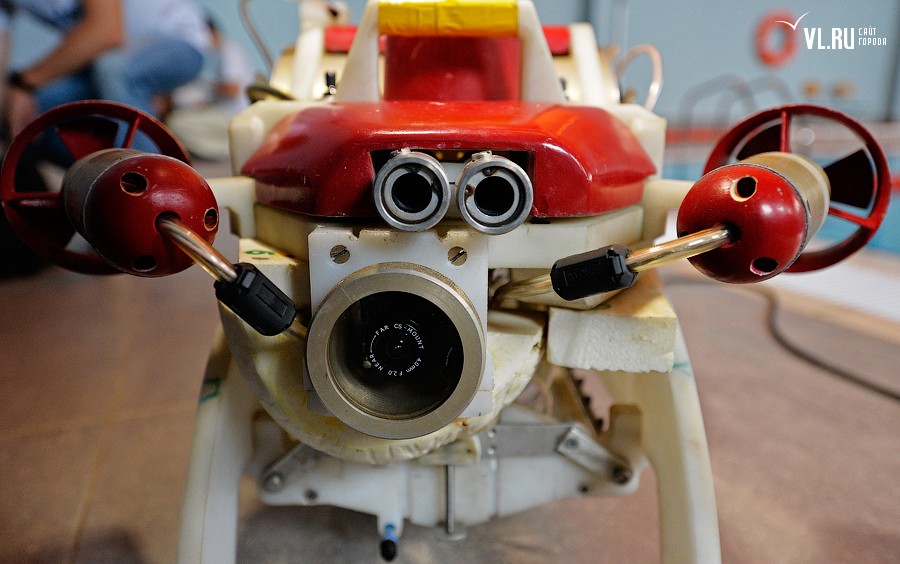
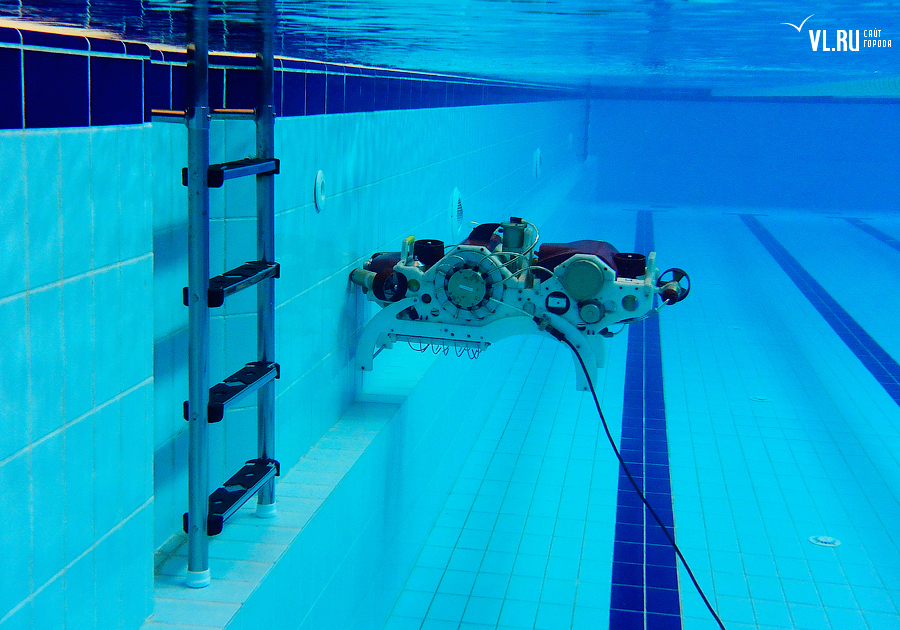
«Джуниор» из Владивостока, Дальневосточный Федеральный Университет
Сайт
Публикация в журнале соревнований (PDF)
Аппарат весит 28 кг, может погружаться не больше чем на 10 метров и создан исключительно для участия в соревнованиях и экспериментах.
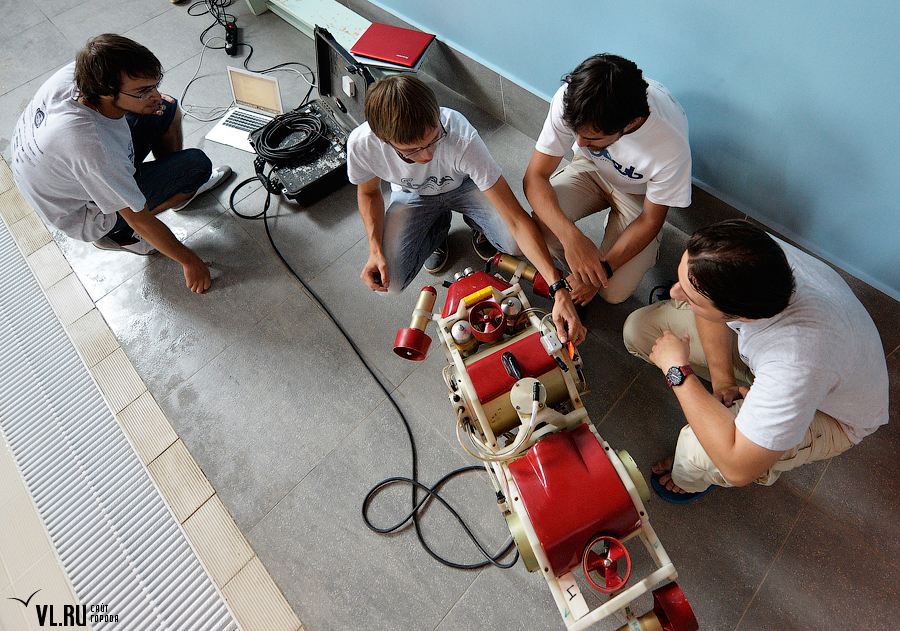
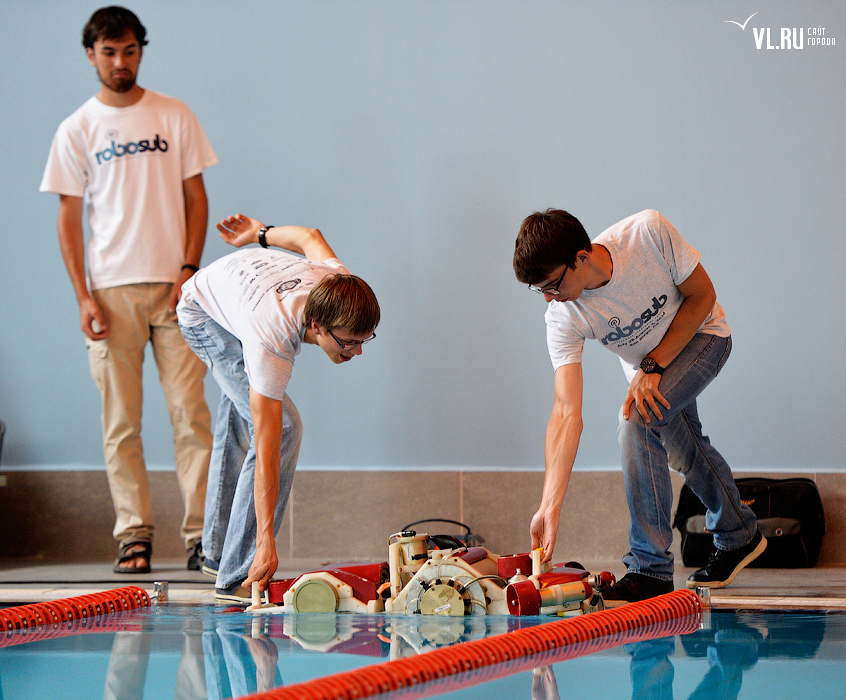
Команда:
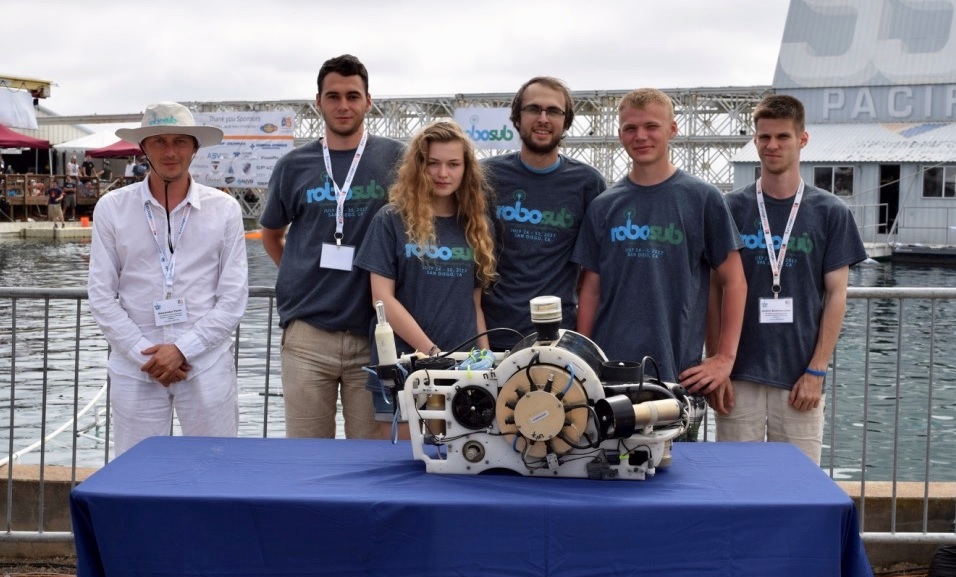
Капитаном владивостокской команды стал аспирант Инженерной школы Максим Спорышев, также в команду вошли студенты Школы естественных наук Александра Жихарева и Андрей Махлярчук, студенты ИШ Владислав Бобров и Иван Чемезов, аспирант ИПМТ Григорий Елисеенко, научные сотрудники ИПМТ Сергей Кулик и Александр Павин.
Видео:















Третье место
«Бамблби» или «Шмель» (Bumblebee) из Национального университета Сингапура
Сайт
Публикация в журнале соревнований (PDF)
Команда:

Видео:
Рассказывает Максим Спорышев, участник российской сборной:
С командой Сингапура «Bumblebee» у нас довольно длинная история взаимоотношений, разные наши старые участники могли бы много историй рассказать, жаль мы их не записываем.
Первые соревнования, в которых мы поучаствовали были Singapore AUV Challenge 2013 в марте
В тот год они проводились впервые. Задания были достаточно тривиальные, нужно было уметь ходить вдоль черной полосы, постеленной на дне и проходить в ворота, сбивать шарик, всплывать в нужном месте. Никаких акустических заданий не было, все объекты стояли вдоль черной полосы.
Я тогда отвечал за зрение и за распознавание этой полосы. Писать софт для аппарата никто из студентов не умел, поэтому то, что у нас тогда в коде творилось — огромный источник баек и пособий по тому, как не нужно все делать.
Когда поехали на соревнования, стабильно работало, наверное, только зрение. У аппарата нужно было отлаживать даже модуль управления двигателями и модуль движения, это делалось даже таская аппарат на руках в гостинице, приклеив черную полосу на пол. Ну или в лягушатнике.
У университета Сингапура также была молодая команда студентов в тот год, которая испытывала все те же проблемы, поэтому мы, наверное, и подружились. Даже несмотря на то, что многие из-нас средненько по-английски разговаривали.
Дружбе поспособствовала девушка по имени Grace Chia, которая была инженером из команды Bumblebee и заодно занималась связями с общественностью.

Она здорово могла находить общий язык с кем угодно, даже если бы ты вообще по-английски не говорил. Совершенно уникальный человек. Благодаря ей, наши команды еще на тех соревнованиях начали тусоваться. Ребята из Bumblebee показывали нам город, позвали на свой кампус и так далее.
Обе наши команды ждал robosub 2013 тем же летом и всем нам нужно было к нему готовиться. В общем много общего у нас нашлось.
На Cингапуре мы тогда победили, выполнив все задания. Кажется у остальных с этим были проблемы. Хотя аппарат у Bumblebee был внушительный и имел потенциал больше, чем у нашего. Также нас сильно удивляло, что у их команды есть огромное количество спонсоров, которые предоставляли им разные устройства, датчики и другие детали для аппарата. Они в свою очередь удивлялись нашему подходу к построению подводных аппаратов.
После тех сингапурских соревнований мы часто тусовались с командой Bumblebee каждый раз, когда видели их. А встречались мы раза два в год.
Grace Chia даже приехала во Владивосток в августе на целый месяц в 2013 году.
За то, время, что мы знаем друг друга у нас всех сменились неоднократно составы. У них каждый год команда пополняется первокурсниками. Многие члены команды уходят довольно быстро. Но есть у них несколько ребят, которые в команде давно и мы их хорошо знаем. Некоторые не в команде, но следят за ее успехами. Это Grace Chia, TC, Eng Wei, Alex John, Hoang, Tey Kee Yeow.
Было много историй, когда ребята из Сингапура нас очень выручали, когда у нас все ломалось.
У нас ломались компьютеры, срочно нужны были монитор, клавиатура, кабель, что-то еще в выходной, когда времени на тесты не очень много, да и магазины почти все не работают.
Grace откуда-то доставала нам вообще все, несмотря на то, что мы их главные конкуренты на их соревнованиях.
Команда BumbleBee — наши главные друзья среди всех остальных :).
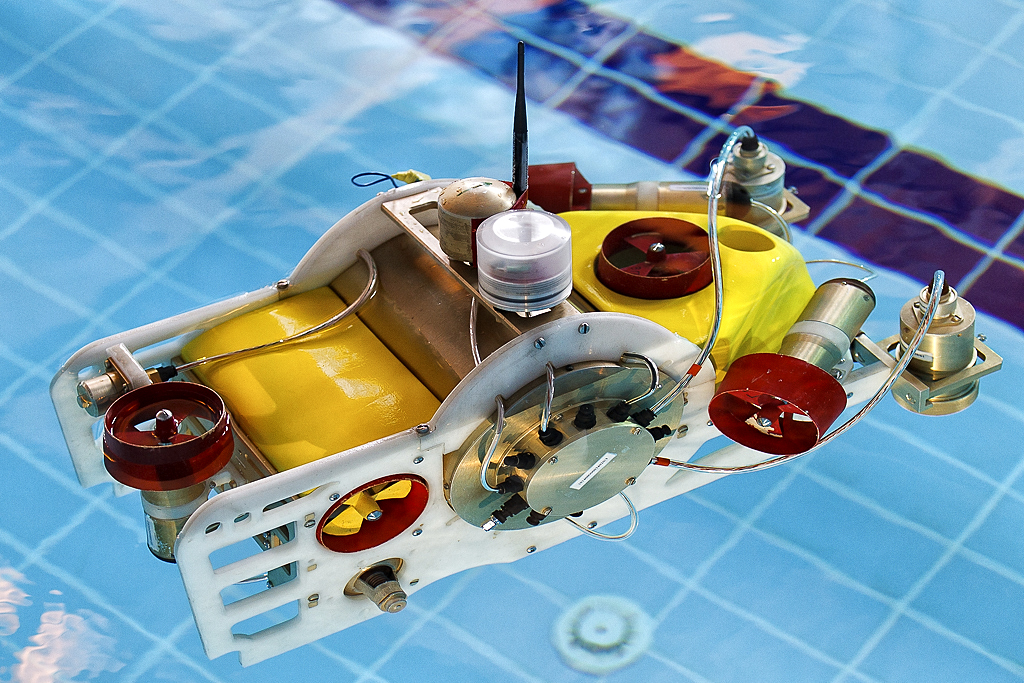
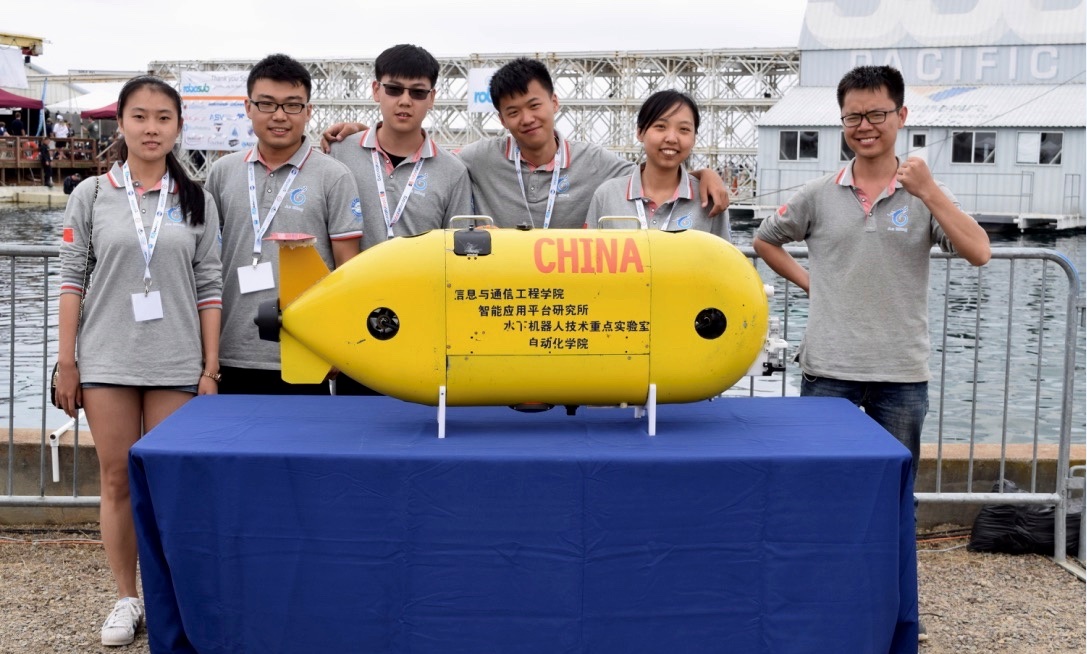
Четвертое место
Желтая подводная лодка из Harbin Engineering University (Китай)
Публикация в журнале соревнований (PDF)
Команда:
Видео:
Максим Спорышев:
Китайцы их Харбина со своей желтой штукой ездят еще с 2012 года. Если посмотреть на их командные видео, можно заметить, что у них в Китае для тренировок есть ОГРОМНЫЙ бассейн. Но почему-то они до сих пор не выполняют все задания даже в таких условиях.
Иван Чемезов: Вообще я думал, что у нас аппарат на костылях. Но нет, бывают и ещё большие калитки. Я прекрасно понимаю, почему у них плохо работает гидроакустика. Суть их блоков электроники — длинные спутанные провода. Наводки и прочее. Батареи без корпуса, все на хомутиках.
Но убили меня индусы, они роутер засунули в коробку из под завтраков и возили его за аппаратом (аппарат под водой, связь над водой). Они собирали свой аппарат молотком! Мы там аккуратно, разъемы потому что стеклянные используем. А они прям по корпусу фигачат.
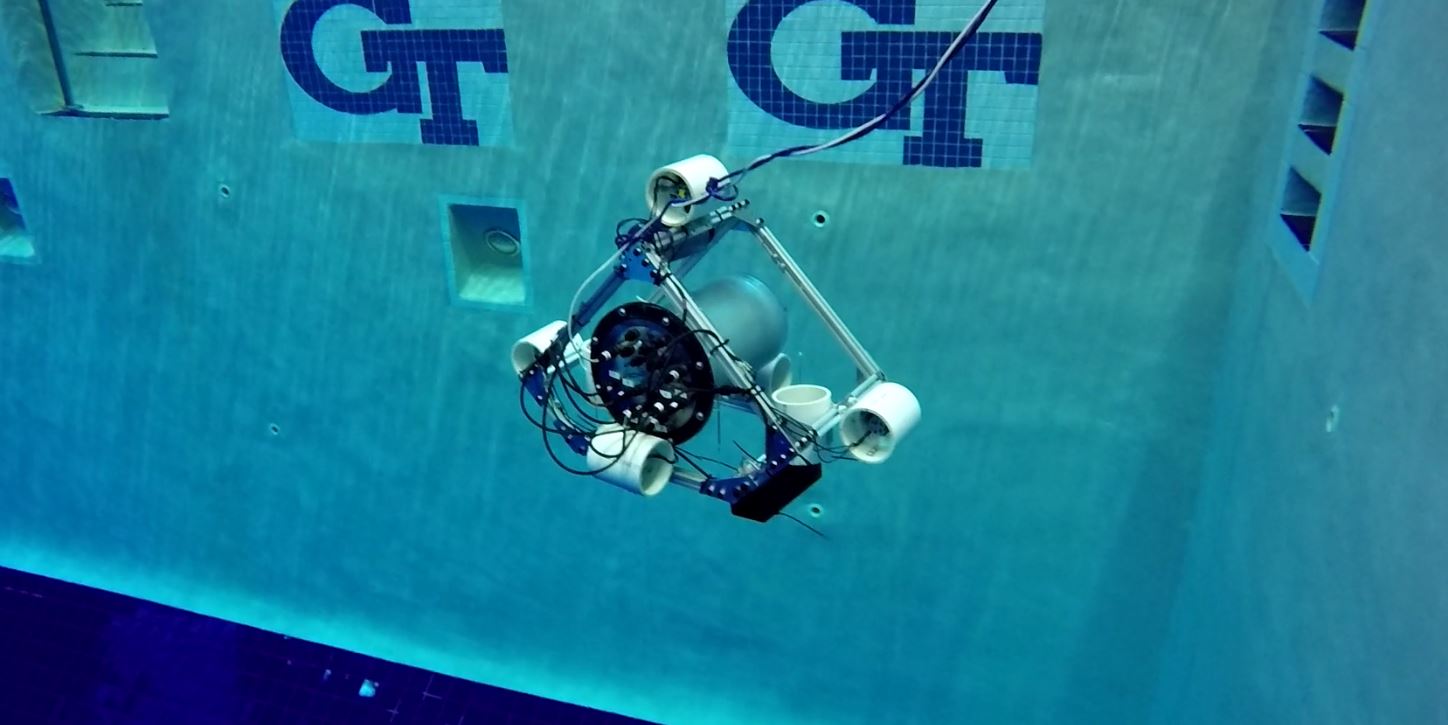
Пятое место
Georgia Institute of Technology (США)
Сайт
Публикация в журнале соревнований (PDF)
Видео:
Спецпризы
Best PR
San Diego City Robotics
Сайт
Публикация в журнале соревнований (PDF)
Видео:
Best New Entry
Team Rumarino, Mayaguez, Puerto Rico
Сайт
Публикация в журнале соревнований (PDF)
Видео:
Sportsmanship Award
Embry-Riddle Aeronautical University, USA
Видео:
Best Presentation
McGill Robotics, Montreal, Quebec, Canada
Сайт
Публикация в журнале соревнований (PDF)
Видео:
Еще одна команда из Владивостока
МГУ им. Невельского
Команда Морского университета заняла 4-е место в RoboSub в 2016 году.
Публикация в журнале соревнований (PDF)
Видео:
Команда:

В составе команды: Владислав Болотов (аспирант), Игорь Сухов (аспирант), Александр Есин (аспирант), Вадим Сорин (студент). Наставниками выступили сотрудники Сектора морских робототехнических комплексов: Сергей Мун, Игорь Пушкарев, Андрей Кушнерик, Николай Сергеенко и Денис Михайлов.

P.S.
Девчонки:

Texas A&M University
Сайт
Публикация в журнале соревнований (PDF)
Видео:
Иван Чемезов: Девчонки с Техаса, наверное единственная иностранная команда с которой я бы хотел познакомится более менее. У них хотя бы есть сходство с батискафом.
Еще байки про команды
Максим Спорышев:
San Diego City Robotics — очень веселые (помню только пару ребят из их состава, какого-то года). Очень забавный чувак есть вот на этом видео:
Они с нашими ребятам познакомились в курилке. У них в те года все довольно туго шло (2014-2015). Каждый раз когда мы им рассказывали про какие-то свои сложные проблемы с какими-то заданиями миссии, или что у нас просто что-то ломалось, чуваки в курилке восклицали в духе «ВООООООУ. ЧУВАКИИИ, ВОТ ВАМ НЕ ПОВЕЗЛО. ЭТО ТАКОЙ ОТСТОЙ!»
Читать еще
Комментарии (12)
Rumlin
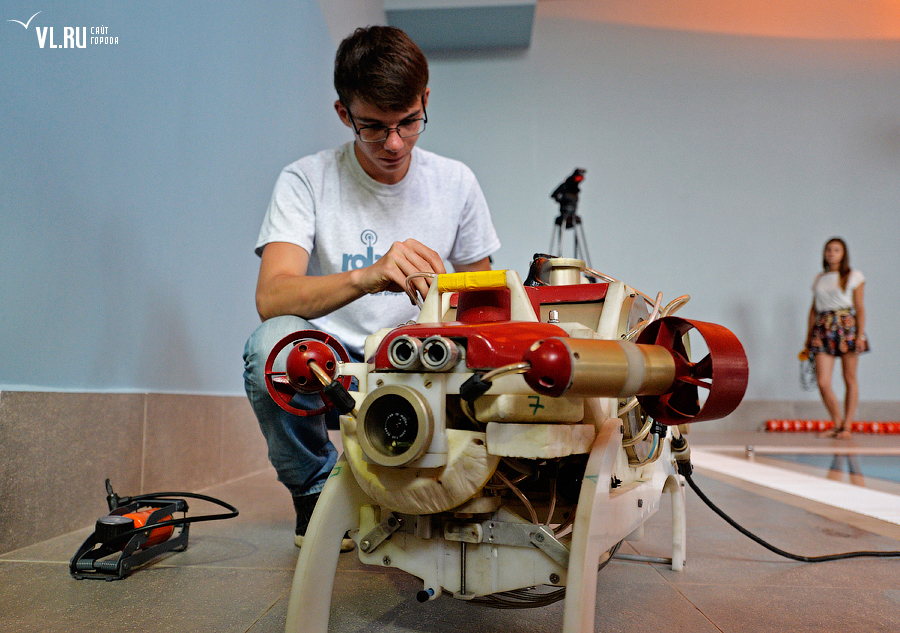
20.12.2017 16:35Интересно как часто вносятся изменения в железо.

MagisterLudi Автор
20.12.2017 16:46Иван Чемезов: Этому аппарату около 3 лет. 2 раза в год у него меняется что-либо в блоках электроники (компы, гидроакустика и пр.) Что касается механики, тут зависит от заданий. Нужен грабер? Сделаем. Нужна стреляка? Хорошо.
Но! самое смешное это то, что:
Мы не пользуемся самым новым аппаратом, так как не умеем с ним работать))))))))

agat000
20.12.2017 17:41А что за проблемы были с солнцем и жарой? Береговая аппаратура перегревалась?

AlekDikarev
20.12.2017 18:47Я мб пропустил, но чем пингеры теледайновские принимаются? Стандартное что-то или каждый сам как может делает?

xtala
20.12.2017 19:45Так… термоядерные бомбы, вода… вода… вода… под водой… термоядерные бомбы… беспилотники… под водой… бомбы… маленькие… набигают. Домики деревянные… в них собаки капиталистические…
… их смывает…
Так стоп, а что так тоже можно было????


Arxitektor
20.12.2017 20:39Вопрос по подводным роботам.
А можно ли бокс с электроникой заполнять жидкостью?
Есть вроде у 3M какая-то жидкость диэлектрик? Да и железо охлаждать проще.
Для пром роботов?
А с моторами проще получается подводный квадрокоптер )
Только для движения вперед нужно еще пару моторов.
Хотя можно обойтись и 4.
Lexxxx
А почему не сделать двигатели поворотными вместо установки 7 штук для движения в разные стороны?
vasimv
Полагаю, что механизм и сервопривод для верчения движка даже по одной оси — будет не меньше самого движка. Ну и слишком все усложняется, включая алгоритмы и настройку аппарата.
Germanets
Предположу, что потому, что поворотный двигатель это уже не один, а 2 или 3 двигателя, 1 или 2 из которых отвечают за перемещение самого поворотного двигателя в одном или двух направлениях…
Ко всему прочему сделать поворотную конструкцию герметичной будет куда сложнее…
MagisterLudi Автор
Иван Чемезов: Поворотный механизм сложнее и, как следствие, менее надежный (собирают студенты), трудно герметизируемый. Естественно, лучше иметь 3 двигателя, чем 2 и один поворотный.
ituphanov
Никто, наверное, особо и не пробовал, и может у кого и получится. Но дело не только в том что это очень сложно с точки зрения механики. Чтобы зависнуть перед объектом, хорошо бы управлять всеми 6 степенями свободы, так что нужно 6 движков, поворотных или нет. Хотя некоторые команды пренебрегают какими-то степенями свободы (например, не могут ходить боком или не управляют креном), и встречаются разные конфигурации.