
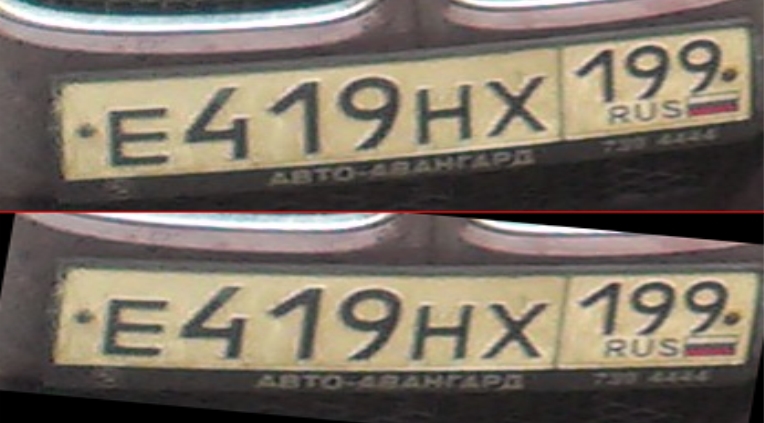
Постобработка
При повороте номера, будем использовать её горизонтальные грани. Чтобы дальнейший алгоритм смог их использовать, необходимо их визуализировать для этого применим к изображению ряд операции:
public Bitmap SomeMethod(Image<Bgr, byte> img)
{
using (Image<Gray, byte> gray = img.Convert<Gray, Byte>())
using (Image<Gray, float> sobel = new Image<Gray, float>(img.Size))
{
CvInvoke.cvSmooth(gray, gray, Emgu.CV.CvEnum.SMOOTH_TYPE.CV_GAUSSIAN, 5, 5, 25, 25);
CvInvoke.cvSobel(gray, sobel, 0, 1, 3);
CvInvoke.cvConvert(sobel, gray); // Image<Gray, float> --> Image<Gray, Byte>
}
return null;
}

Выделение признаков
Признаками для данной задачи являются прямые линии, при этом они должны быть больше, чем половина ширины изображения. Для выделения линии используем метод:
public LineSegment2D[][] HoughLinesBinary(
double rhoResolution,
double thetaResolution,
int threshold,
double minLineWidth,
double gapBetweenLines
)
Первые два аргумента rhoResolution и thetaResolution устанавливают желаемое разрешение для линии в бинарном изображении. Линии можно рассматривать как 2D гистограммы с пересечением и углом наклона, таким образом rhoResolution назначается в пикселях, а thetaResolution в радианах. Threshold является минимальным количеством пикселей в отрезках. Когда счетчик пикселей больше чем порог, отрезок записывается в список найденных. Следующие два параметра minLineWidth и gapBetweenLines, являются минимальной длинной отрезка и разрывом между линиями, назначаются в пикселях.
Таким образом для получения признаков используем следующий код:
public Bitmap SomeMethod(Image<Bgr, byte> img)
{
LineSegment2D[] lines = null;
using (Image<Gray, byte> gray = img.Convert<Gray, Byte>())
using (Image<Gray, float> sobel = new Image<Gray, float>(img.Size))
{
CvInvoke.cvSmooth(gray, gray, Emgu.CV.CvEnum.SMOOTH_TYPE.CV_GAUSSIAN, 5, 5, 20, 20);
CvInvoke.cvSobel(gray, sobel, 0, 1, 3);
CvInvoke.cvConvert(sobel, gray); // Image<Gray, float> --> Image<Gray, Byte>
lines = gray.HoughLinesBinary(1, Math.PI / 45, 50, img.Width / 2, 0)[0];
}
return null;
}

Вычисляем угол наклона
Для того чтобы вычислить угол наклона сформируем среднее значение для точек полученных линий (так как это дешевле, чем просчет угла для каждого):
LineSegment2D avr = new LineSegment2D();
foreach (LineSegment2D seg in lines)
{
avr.P1 = new Point(avr.P1.X + seg.P1.X, avr.P1.Y + seg.P1.Y);
avr.P2 = new Point(avr.P2.X + seg.P2.X, avr.P2.Y + seg.P2.Y);
}
avr.P1 = new Point(avr.P1.X / lines.Length, avr.P1.Y / lines.Length);
avr.P2 = new Point(avr.P2.X / lines.Length, avr.P2.Y / lines.Length);
И затем достроим угол с помощью горизонтальной линии:
LineSegment2D horizontal = new LineSegment2D(avr.P1, new Point(avr.P2.X, avr.P1.Y));
Получили результирующий угол:

Где C (horizontal), A — катеты, B (avr) — гипотенуза.
Для вычисления сторон треугольник и угла CB воспользуемся школьными формулами:
double c = horizontal.P2.X - horizontal.P1.X;
double a = Math.Abs(horizontal.P2.Y - avr.P2.Y);
double b = Math.Sqrt(c * c + a * a);
angle = (a / b * (180 / Math.PI)) * (horizontal.P2.Y > avr.P2.Y ? 1 : -1);
После чего просто применяем метод Rotate для изображения с полученным углом.
public Bitmap SomeMethod(Image<Bgr, byte> img)
{
LineSegment2D[] lines = null;
using (Image<Gray, byte> gray = img.Convert<Gray, Byte>())
using (Image<Gray, float> sobel = new Image<Gray, float>(img.Size))
{
CvInvoke.cvSmooth(gray, gray, Emgu.CV.CvEnum.SMOOTH_TYPE.CV_GAUSSIAN, 5, 5, 20, 20);
CvInvoke.cvSobel(gray, sobel, 0, 1, 3);
CvInvoke.cvConvert(sobel, gray); // Image<Gray, float> --> Image<Gray, Byte>
lines = gray.HoughLinesBinary(1, Math.PI / 45, 50, img.Width / 2, 0)[0];
}
if (lines != null && lines.Length > 0)
{
double angle = 0;
LineSegment2D avr = new LineSegment2D();
foreach (LineSegment2D seg in lines)
{
avr.P1 = new Point(avr.P1.X + seg.P1.X, avr.P1.Y + seg.P1.Y);
avr.P2 = new Point(avr.P2.X + seg.P2.X, avr.P2.Y + seg.P2.Y);
img.Draw(seg, new Bgr(255, 0, 0), 1);
}
avr.P1 = new Point(avr.P1.X / lines.Length, avr.P1.Y / lines.Length);
avr.P2 = new Point(avr.P2.X / lines.Length, avr.P2.Y / lines.Length);
LineSegment2D horizontal = new LineSegment2D(avr.P1, new Point(avr.P2.X, avr.P1.Y));
img.Draw(new LineSegment2D(avr.P1, new Point(avr.P2.X, avr.P1.Y)), new Bgr(0, 255, 0), 2);
img.Draw(avr, new Bgr(0, 255, 0), 2);
double c = horizontal.P2.X - horizontal.P1.X;
double a = Math.Abs(horizontal.P2.Y - avr.P2.Y);
double b = Math.Sqrt(c * c + a * a);
angle = (a / b * (180 / Math.PI)) * (horizontal.P2.Y > avr.P2.Y ? 1 : -1);
img = img.Rotate(angle, new Bgr(0, 0, 0));
}
return img.ToBitmap();
}

Комментарии (17)

ZlodeiBaal
22.07.2015 17:46+2Вот тут мы выкладывали крупную базу с номерами — habrahabr.ru/company/recognitor/blog/243919
Попробуйте этим методом. К сожалению, где-то каждый 15-20 номер будет обработан некорректно. Прямая криво выделиться, прямая частично не видна, и.т.д. и.т.п.
Вот тут вот мы писали про дроугой метод — habrahabr.ru/company/recognitor/blog/221891
Он работает чуть лучше, но всё равно неидеально.
Лучше всего у нас заработал следующий метод: перебор углов и для каждого угла построение гистограммы интенсивности по y. Там где будет максимальный градиент — был корректный поворот. Проилюстрирую:

Сразу тут же отвечу на прошлый вопрос по поводу поиска номера.
Самый простой вариант — использовать каскад Хаара ( habrahabr.ru/company/recognitor/blog/223441 ). В принципе, наш каскад для российских номеров замерджен в текущую версию OpenCV. Так что качаете OpenCV и распознаёте номера в кадре.
Метод, конечно, не идеальный, но из тех, что просто реализовать и запустить — наилучший.
В реальный системах используется очень много различных детекторов и критериев. Многие из которых опираются на подсветку.
Сделать выделение на произвольных картинках лучше чем каскадом Хаара мы не смогли никак.
cyberspace Автор
22.07.2015 18:13А как насчет идеи о выделении машины в отдельное изображение? При условии если это, конечно, непроизвольное изображение, а снятое со стационарной камеры. Хочу реализовать эту идею, все же интересно Ваше мнение, как более опытного человека.
ZlodeiBaal
22.07.2015 18:19Со стационарной камеры всё проще — можно изначально определить углы и размеры. Если на такой камере есть подсветка — то лучше всего искать номер, его будет хорошо видно.
Выделять машину — это можно, но работать будет менее точно чем выделение номера напрямую. Машины разные, номер — одинаковый.
Обучить хаара проще чем нейросеть.
Насколько я знаю, в сложных системах много различных алгоритмов выделения номера. Многие из которых подкручиваются руками.
cyberspace Автор
22.07.2015 18:28Я задумывал с самого начала, грубо говоря — копить базу найденных номеров и каждый месяц переобучать каскад Хаара на более большом количестве примеров. Но показалась слишком простой идея. Что же, буду экспериментировать дальше, спасибо=)
ZlodeiBaal
22.07.2015 18:35А чем не понравилась та база, что у нас выложена?:)
Если её руками разметить — можно неплохо каскад обучить.
Наш каскад выложенный где-то 90%-95% номеров выделяет первично. Он не по всей базе обучен, если по всей — можно ещё пару процентов набрать. Для промышленной задачи, естественно такого не достаточно, но для многих применений достаточно.
Но для промышленной, боюсь, либо какую-то хитрою нейронную сеть свёрточную обучать, либо что-то большое многоступенчатое городить.cyberspace Автор
22.07.2015 18:44Не для промышленных масштабов, а для интереса делаю, ну и для будущего диплома=) Есть желание сделать, что-то крайне интересное и определиться с будущей профессией=)
По какой-то причине не один каскад у меня не работает.
Просто крашится на этой строчке. Естественно, xml — документ размешен в той же директории, что и исполняемый файл, да и прямой путь ситуацию не поправляет.HaarCascade haar = new HaarCascade("haarcascade_russian_plate_number.xml");ZlodeiBaal
22.07.2015 19:14У вас старый Emgu? У меня 2.9.0. (это была какая-то бэта версия годичной давности).
Просто в нём вызов каскада осуществляется как:
CascadeClassifier PL = new CascadeClassifier(«haarcascade_russian_plate_number.xml»)
И потом:
Rectangle[] PlateDetected = PL.DetectMultiScale(
gray,
1.1,
3,
new Size(160, 60),
new Size(900, 250));
В текущем OpenCV каскад подцепляется.
В принципе, где-то 2 года назад OpenCV менял алгоритм формирования каскада. Может «HaarCascade» оттуда остался для старого формата.cyberspace Автор
22.07.2015 19:54Огромное спасибо=) Да, действительно, проблема была в версии.
using (Image<Gray, byte> gray = img.Convert<Gray, Byte>())
plateDetected = haar.DetectMultiScale(gray, 1.1, 3, Size.Empty, Size.Empty);
Достаточно эффективная вещь, небольшая эвристика и алгоритм вполне годен=)
ZlodeiBaal
22.07.2015 18:13+1О, нашёл. Ещё есть такой мощный алгоритм — habrahabr.ru/post/245497
Но его не тестили особо.
samodum
А как вы находите на изображении области с номерами? Эта задача посложнее поворота, и было бы интересно узнать ваше решение.
cyberspace Автор
Я делал это с помощью проекций. К изображению просто применялся оператор Собеля с некоторыми фильтрами, и дальше обрабатываем проекцию. Этот принцип описан тут. Не знаю, имеет ли смысл делать по этому поводу статью=)
samodum
Указанный метод работает, если на фото несколько автомобильных номеров? Все найдёт? Какова погрешность нахождения? Достаточна ли скорость для поиска в режиме реального времени и в движении?
cyberspace Автор
Ему требуется доработка. А при нескольких номерах, если камера установлена на неподвижную платформу, и видит подвижный поток, то проблему как мне кажется можно решить с помощью выделения машин в отдельное изображения с помощью алгоритма определения движения. Идея, как мне кажется довольно интересна. Но для полного изображения с фоном метод в моей реализации годен только для хорошо читаемых номеров, фон дает большой шум на проекциях.
samodum
Это как раз самое интересное — выделять номера в потоке, когда сама камера в движении.
cyberspace Автор
Если сама камера в движении, то каскад Хаара лучше решение, я считаю.
samodum
Я тоже так думаю, но, возможно, что есть другие методы.
netmaxed
а что насчет HOG?
dlib лица с помощью хогов выделяет на порядок лучше чем OpenCV c каскадом Хаара, например.